
allanonmage
It's Not Just Me; Went To A Makerspace And Even The Latest Issue Of Servo Can't
It's not just me; went to a makerspace and even the latest issue of servo can't figure out the EZ Robot software.
I bought my EZBv4 when it was brand spanking new in 2014 and mated it to a RoboPhilo. Couldn't figure out how to program it the way I wanted. Posted on the forum and got defensive deflections telling me to RTFM N00B. I got 110% certified (website could not count correctly), but still had no idea how to program the thing.
One of my old threads got necrolized and reminded me I had a $500 robot and a $100ish controller collecting dust.
I took the setup to a local makerspace, downloaded the latest version of ARC, and out of the 3 of us, we could not figure out what was wrong or how it was supposed to be programmed.
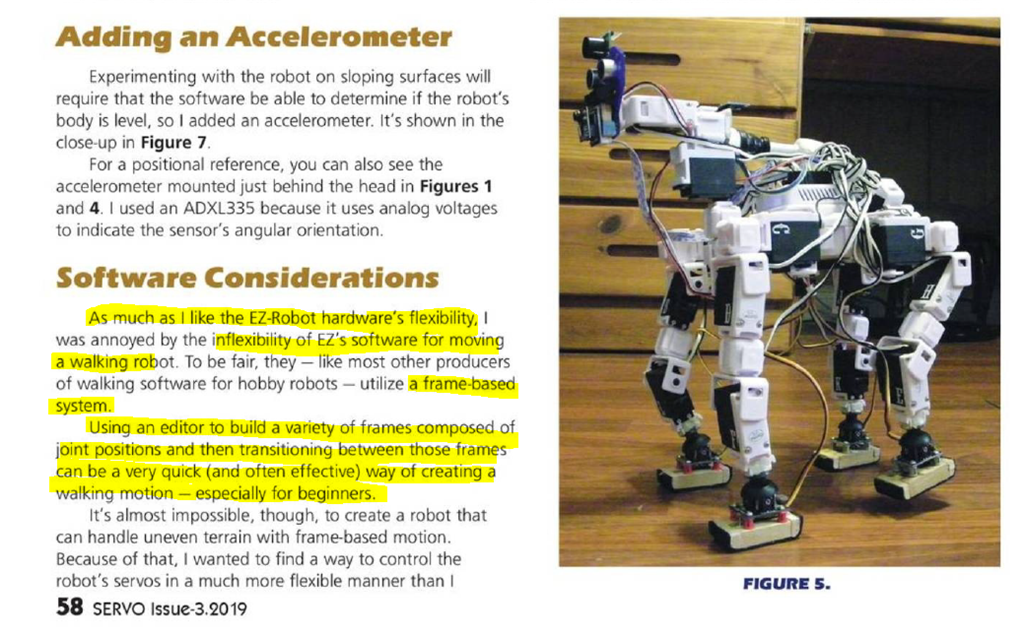
This month's servo magazine has an article about the EZBv4, and the opening jist is that the software doesn't do what he wants, so he programs in something else and makes a direct connection to the board, also saying that the software was kludgy and gimmicky.
Now that you're up to speed, I think I might have a defective board, and I still don't know how to make the software work.
While at the makerspace, we found inconsistent behavior when testing servos. Sample programs did not affect the servos. The button on the webpage to put all servos to 90 degrees sometimes worked, and sometimes the servos went limp right after moving.
Both of the other guys there recommended that I buy a new board because the software was too confusing.
BTW the search function of the website can't find any of my old posts, but DDG can: https://duckduckgo.com/?q=synthiam+allanonmage&ia=web
Related Hardware (view all EZB hardware)

Related Robot Skills (view all robot skills)



Ah ha ha, Right on DJ! would prove to be interesting!
Welcome back allanonmage. It's good to see you visit again. I hope you can find a way to get your robot up and running. From what you are describing you may indeed have a bad board. While uncommon bad EZB's have popped up. I'm not blaming any fault on you but it is possible to damage these boards several ways while using them. There also could be issues with the computer or your wifi connection somehow. I've had problems in the past with EZB's, keeping them connected and controlling them. In all cases it turned out to be my mistake in setting up the scripts, hardware I'm trying to control or my computers issues. Again, I'm not ruling out an EZB issue.
If you could post some of the scripts you have been trying to write or use we could help by seeing is there are any improvements or changes needed that may be causing these issues. Also there are very many example scripts you can download through ARC from the EZ Cloud. These scrips show examples of just about anything you may want your robot to do and were written by both EZ Robot designers and users like you and I. While most cant be just cut and pasted and make your robot run without changes to customize it to you needs, they do help you understand the structure needed to write your own EZ Script. In addition, inside the EZ Script control where you write your script there is a Script help list on the right that lists every command available with examples of how they are used. You can even cut and paste and with a couple changed make them work.
I understand how frustrating it is to have someone tell you to "Just Read The Freakin Manual". I know there are some people that default to that advice. However there is a lot of truth and wisdom in that path. You will find most of your answers in the EZ Robot manual, if you can find it. Personally I've always had a very hard time finding it on this website and get frustrated trying to dig it up. Mostly though If you can give us specific problems there a lot of kind and knowledgeable people here that will help. I looked through a lot of your past posts and I see you were good at listing your questions about how EZ Robot worked but I didn't see a lot of specific questions about the problems you were having. Maybe I missed them. Sorry if I did.
Please post your scripts, take pictures and videos of your problems if you can. We can help you write some simple scripts that will work with your setup to test your hardware. If the proper script dont work we can help figure out if it's your computer or the connection. If all that seems to work then it's probably time for a new EZB.
As far as EZ Robot and ARC being kludgy and gimmicky and hard to understand I gotta respectfully disagree. I will say this however; it is hard to understand until you start working to learn it. Like anything else there is a learning curve. Despite all the comments made by EZ Robot, this is not a plug and play platform. Builders need to learn how things work in ARC and how everything works together. The hardest concept for me to understand in ARC was timing because of the Threading feature of Windows that ARC utilizes. ARC can run several commands or run several scripts at the same time and send them to you robot. If two commands are sent to the same device at the same time one of the commands wont get heard or even stop the first one. Even though there are Pre-written controls and scripts they usually need to be edited and reorganized to work with your robot. This is more true if you are building your own robots and not building a EZ Robot Revolution Robot. In comparison to any other robot platform or computer language ARC and EZ Script are light years easier to understand, learn and write. Lot less to learn and understand. Lots faster to get up and running with professional results.
Please start by posting the ARC Project you have been using with your scripts inside. By your description of your servo going limp and unresponsive it could be a simple matter if timing or even the wrong use of a command at the wrong time. It almost sounds like your sending a unwanted servo release command before the servo reaches it's destination or shortly after. It sounds like you're almost there.
@Allanonmage:
My initial idea was not to criticize your post or minimize your issues, but, is important to get right facts and the understand the different motivations. To recap it's clear the magazine article said the software is effective for beginners.
I did some google search and found the robophilo specs:
user manual: https://www.robophilo.com/live/products/RoboPhilo/manuals/en/web/index.htmone of your posts: https://www.robotshop.com/community/forum/t/please-help-with-robophilo-cant-load-a-motion-file/22618
let's get to the next complain:
Your first complain is 2011, 8 years later I hope you have bought new batteries, your robot has 24 servos and the available power (Specs) is: 5 x https://www.amazon.com/Exell-Rechargeable-Battery-toothbrushes-instruments/dp/B00YFSXKCI => 5 x 1.2v = 6V 700 mAhNote: some user complains those batteries don't last more than 18 months, even if you don't use them frequently.
When you put all servos to 90 degrees requires that all servos get a good amount of energy (Amps) if the batteries can't handle a brownout will occur https://en.wikipedia.org/wiki/Brownout_(electricity) the voltage will drop, and the EZB board will reset, and the servos will stop moving, , the ezb http page will be unresponsive, etc etc.I would get new batteries then i would connect a single servo to EZB, then i would use ARC to control the servo to test the servo positions, then one by one to confirm all of them are full functional.
After that i would connect all of them and i would test moving all of them at same time, if you have issues i would consider upgrading the power, maybe 700 mah are not enough to handle all the servos plus an EZB controller.
bear in mind EZB is a wireless (wifi) controller, wireless controllers require more power.
Please reset your mindset and start from the begin, breaking the problem in small sub-problems.
I believe it's possible to have your bot with ARC but don't expect to be a 5 minute journey.
This is an old school link to DJ RoboPhilo Jr with EZB3 Bluetooth....so all images of the controls in the software and the voltage requirements will be different, but it gives you the idea of how it might work with a EZBv4 - keeping in mind all the points PTP just pointed out like the v4 is wifi and you'll need to be mindful about the power you are suppling. https://synthiam.com/Community/Robots/RoboPhilo-485
BTW - Check out that robot's right hand in the second video...is that a EZ-Bit CLAW Prototype? cool DJ?
PTP's advice to control 1 servo, master that then move on is how I would approach your project...that's how I approach all my projects. And if you can post a video of the issues you are see, even if its something quick, it helps to see things from your side and troubleshoot.
As far as pointing out that the typical way to program a robot was a frame based system, it wasn't until about a year or so ago that I realized what was going on. The original documentation for RoboPhilo didn't explain any of that (but it did use frames), and none of the EZB documentation circa 2014 - 2016 mentioned it either. I agree with the author of the article where there is nothing inherently wrong with that approach. I don't have any other experience with off-the-shelf robotic kits, but I have built my own robot from parts and other projects.
I would have liked to know that the author was the creator of RoboBasic though. I must have missed that while reading the article.
I tried using the servo write command in my own EZ Script, using the sample script from here[1], and running the RoboPhilo Jr Example Project (for those that don't know, the Jr has about half as many servos, so it obviously won't work correctly).I started out testing 1 servo on D0 with the servo(?) command in the scripting tool, with my script and a sample script that I now can't find, then added a bunch of other servos onto various other servo ports while trying to run the RoboPhilo Jr project. It was the opposite of clear to figure out how to get any controls to use a specific port, but somehow through rapid and random clicking, I managed to get a horizontal servo assigned to D0. However, it did not respond to commands. However, it was not clear if I was giving it a command, or setting a limit. Most of the time, the board seemed to respond, but the servos do not. I could only get the servos to respond in the web UI.
[1] Well, I did look for the sample script in the help file section of the site, but I couldn't find it. That's most of my issue with the documentation. There are multiple articles talking about the same thing, but kinda slightly different, and they all skip the first few steps to get there, and I waste all my energy getting frustrated clicking around looking for something that should be there but clearly isn't. For example, I got to this page https://synthiam.com/GettingStarted/Behavior-Control?stepNumber=15, which eventually (after wondering why I'm at a camera page) gets me to https://synthiam.com/Products/Controls/Servo/Horizontal-Servo-16098, which has a link to https://synthiam.com/Tutorials/Hardware.aspx?id=4, which gives me a 404 error, presumably because of the company split. It was confusing to retrace my steps, so it should be confusing to read.
In concept, I agree. However, when you are telling people to read your manual that you wrote, you should also direct them to the specific section, and that recommendation has to be highly relevant. The last two are what seem to be missing here. I write manuals professionally, so I appreciate good documentation. I have yet to find programming documentation that I also find helpful, and the EZB stuff, while voluminous, seems to be written in programming style, which for some reason doesn't work for me.This guy's project was what convinced me to buy an EZB controller, and I had high hopes to get it up and running quickly given that he did with a previous generation controller: https://synthiam.com/Community/Robots/Everybody-Meet-phil-388
No, I'm not here trolling. I'm incredibly frustrated with this, and it's getting the better of me as far as reporting details to request help. What started many years ago as "how do I program this thing?" seems to now be at "How do we determine this thing isnn't broken?" and I think it will soon be at "OK, so it's a 5 year old out of box failure, what is the manufacturer going to do to make it right?"
As far as pictures, you can find them on my thingiverse and github, which uses this same username.
Hi @allanonmage,
It's definitely understandable that you are going to run into some issues being at your level of understanding. With ARC you actually have to forget some things to take advantage of how easy it can be.
It seems that you have challenges in two areas:
Scripting servo movements: This is something I had to forget about myself. The power of ARC is that it puts this concept on it's head. With ARC you don't need to script servo movements any longer. The AutoPosition control takes care of all the scripting (or if you are testing one servo, just use the horizontal servo control). It may seem backward to use something so elementary but all the most amazing robots that people have built in our community use the AutoPosition control.
Power: Something that almost every robotist struggles with is power, trust me, I was there too. Servos are hungry for instant current and if the power supply can't give it, the servos simply drag down the voltage until the robot controller resets. Unfortunately, the power supply you have is not sufficient for the amount of servos you have. With a 35W supply you can only likely run 5 servos or less. With initial surge (in-rush) current of all the servos trying to get to 90 degrees you'll brown out the robot controller every time. For a wall powered power supply we usually run a 5V 20A supply (100W) for our robots. It is for this exact reason that in the past we created servos that could run directly off 7.4V lipo battery voltage. You don't have to deal with the in-rush current limitations of power supplies and voltage regulators.
P.S. Just in case you hadn't run into it yet, ARC also has a battery protection setting which won't allow you to do much if you are supplying the EZ-B with 6V. It will disable the servos at any voltage below 7V by default and give you the "low battery" message until you drop the voltage down in the settings of the connection control.
allanonmage, First we need to determine if the EZBv4 is operational.
Try resetting the EZBv4 to default by powering the EZB and press and hold the small black button. You should hear the EZB talk. If that works, check out this link on how to connect to your PC. https://synthiam.com/Community/Tutorials/How-To-Connect-Your-Ez-b-V4-To-Your-Computer-both-Ways-ap-And-16295
allanonmage takel that robot.step by step.or build another bot.
is kenny storm still on the forum here? maybe he can help .he made a robophilo.