






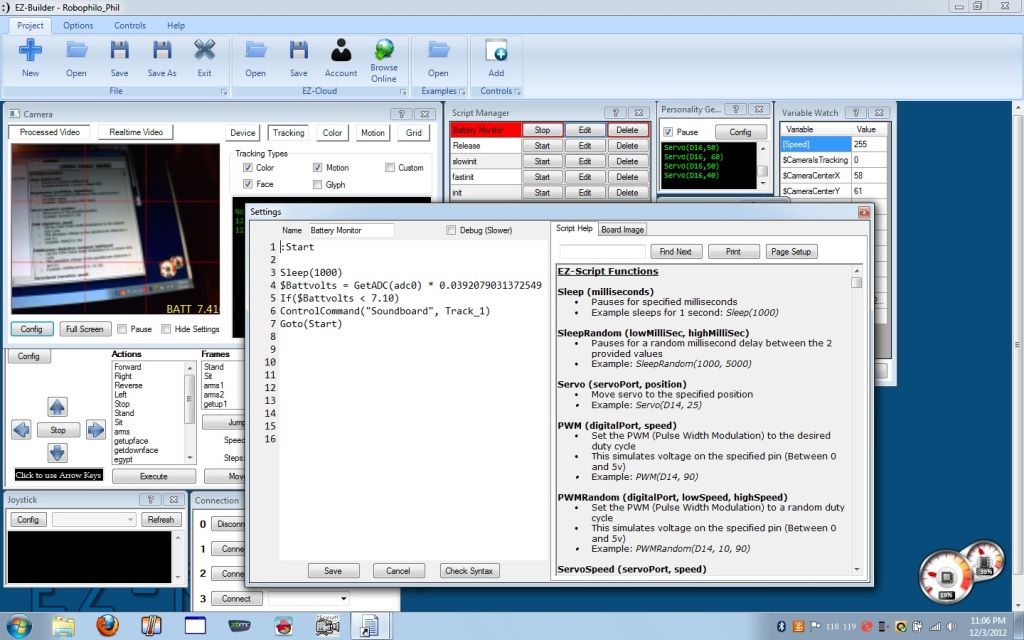
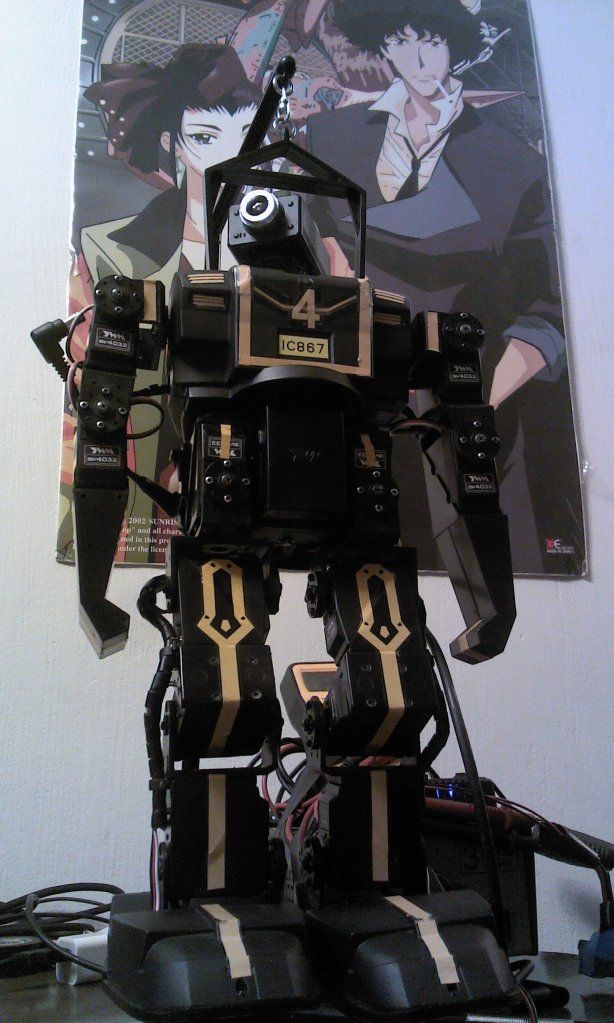
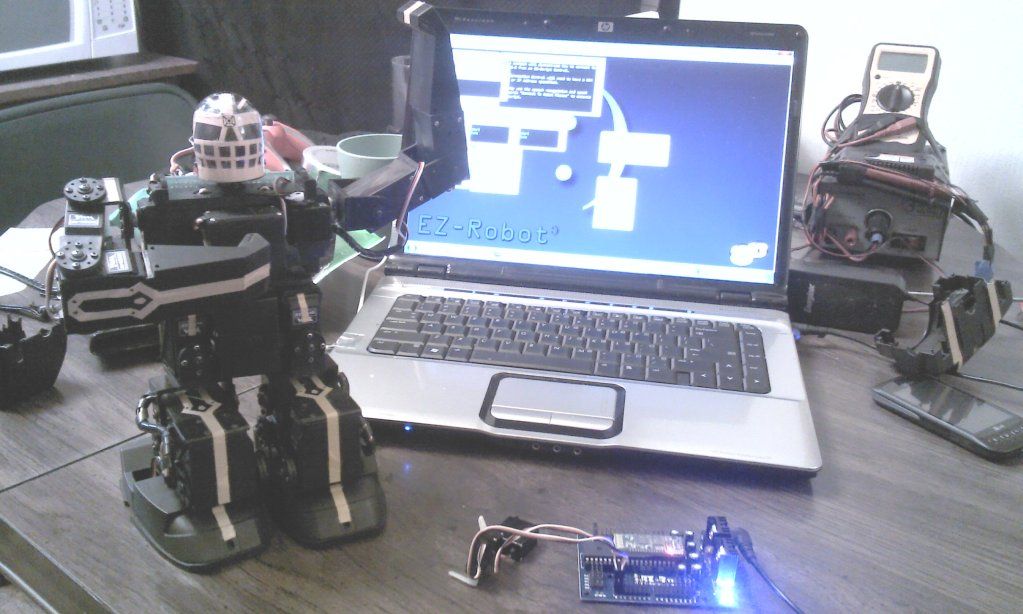
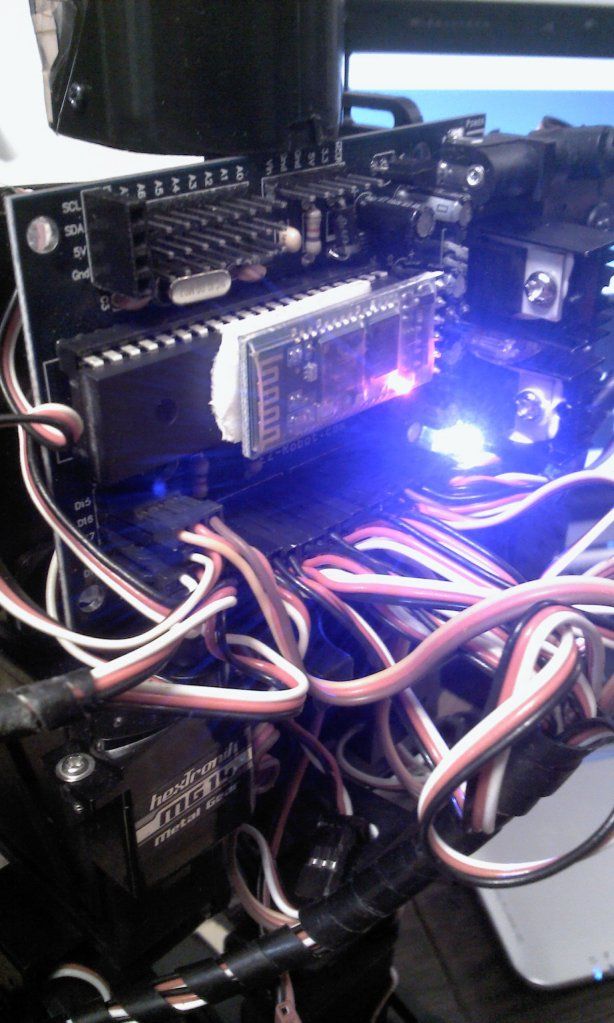
Just got my EZ-B today, and I hit the ground running:) This is my robophilo robot. He's the cheapest 20 DOF robot on the market. PHILO stands for "Programmable Humanoid In Lifelike Operation". I Think the creators may have overlooked the cryptic acronym lol. I just set up the AutoPosition with his first movement. I cant believe how easy this is, I got him to this point in just a couple hours:) These are all standard servos, but with all of them running off the EZ-B, the regulators make some serious heat. Even had a couple brownouts. For now I'm using a 12v 3A power supply. The onboard battery is a 2 cell 750mah Li-po (8A continuous 15A max heli batteries lol) that I haven't tried yet.The next step is to give the servos external power, I don't want the EZ-B carrying all that juice:) Here's a short video and some pictures:)


Discover more robots

Kashyyyk's Star Wars D-O Droid

Robot56's Just Another Omnibot

Phil is awesome! Welcome to the community!
Wow! Just watch him and rename him according to HIS particular personality.
Just watch him and rename him according to HIS particular personality.
P.S. You COULD call him Doctor Phil so he sounds more knowledgeable. But then people would have to always be asking him questions, etc.
I thought that RoboPhil comes with a microcontroller.
It does, but it sux. The controller was an atmega32 with 8k of memory. Its infrared controlled from the factory with an optional upgrade to a playstation controller. The software was horrible and the flash memory would wipe itself if you ran the battery too low. I kept thinking to myself "there's gotta be a better way". Then I saw Dj's wall-e video and was hooked lol:)
Welcome, Kenny Storm, like you, I too was hooked on learning ez-b for almost two years, and his draft-legged humanoid robot is the first here, whether you can cosiderarse a pioneer!
A work of art.
Very cool!
Kenny! Great work You can use the STEPS to increase the speed of the servos also, in case you are looking for fast movements. I really like that you've adapted the Auto Positioner so quickly! Great work
You can use the STEPS to increase the speed of the servos also, in case you are looking for fast movements. I really like that you've adapted the Auto Positioner so quickly! Great work
To prevent the VR's from heating up, I use a 5cm by 5cm 5volt fan (available in surplus from eBay for cheap)...
Your EZ-B will run ALL day with no heat issues using this fan mounted like this
Here is a search: https://www.ebay.com/sch/i.html?LH_BIN=1&_sacat=0&_nkw=50mm%20fan%205v&_sop=15
I connect the fan power using the plug it comes with to one of the unused ADC ports