
Doombot
Charging Dock Ideas
Repost :
@Everyone
I am designing a charging dock for my bot, and a lot of what @Rich said, I'm already doing in the background...I'm already in touch with a few great programmers willing to help - compensated of course. However I think we need to approach this problem from a different angle? If sensors or coding is so much work, why not do it from the engineering/mechanical perspective? I have a few ideas I'm drawing up, I will post this on the forum maybe we can all dissect it.
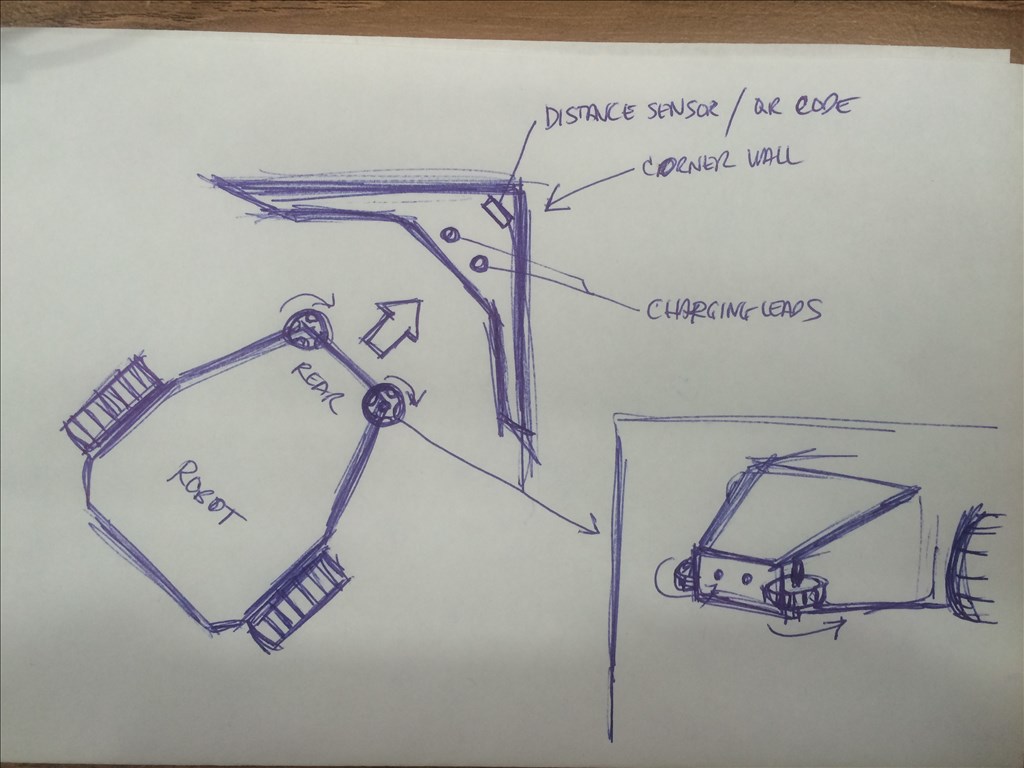
Here's one of them(rough sketch of course be kind):
I was thinking omni wheels going on the back of the bot, sideways, so all it needs to do is find the QR code or distance sensor, and the wheels would pretty much "force" the robot to go to the corner of the wall, where the charging leads could touch. we can do it to where the charging leads are hidden or have some cover on it, that will pop open (using the distance sensor) when the bot is within the vicinity. Any thoughts? This seems doable to me.

@Doombot,
The only issue with gyros for things like arm position is that they can't tell you what position you are in, just whether you are moving and how much, so you need some kind of initialization like a limit switch and possibly intermittent calibration depending on how long they are powered on and how much movement has occured.
Pots are absolute position (if properly tuned and calibrated) where gyros are relative position.
Alan
@thetechguru
Ah gotcha. I'll stick with absolute position (pots). I understand that.
@Alan.
Got it. Makes scenes now. LiPo's discharge then recharge, SLA's just get topped up. Thanks.
So if it's cool, I'd like to put the autonomous seek and dock side of things aside just for a moment, as I wanted to share in idea I had about the mechanical side of dock charging that @Doombot mentioned. I did a bit of searching through my couple of thousand pictures on my laptop this evening and found some drawings (you can have a good laugh, I don't mind) that I knocked up a couple of years back when I was mucking around with radio controlled projects. It was a docking station idea I had that never got past the drawing stage.
In the first picture, the idea was to have the dock move on a small track and to also be mounted on a bearing that would freely rotate when the robot docked incase the robot wasn't exactly aligned. Where for example a Roomba would do its little shuffle dance when it aligns and about to mount the dock, my idea of a mobile docking station would do the necessary movements and alignments that were necessary...
The second picture shows the idea if the charging terminals themselves. With the exception of the robot mounting the docking station, the only real electro mechanical part here is the deploy and retract battery terminals of the robot. As the robot gets close to the dock, a servo or actuator would deploy the battery charging terminals, pushing through a hanging flap on the back of the robot (secured by a low strength magnet so it doesn't flap about when the robot is moving). As the robot docks, the battery charging terminals would push through a second flap on the dock, slide inside the dock casing and make contact with spring dock charging terminals insuring a secure contact. When charging was complete the robot would initiate, leave the docking station and retract the battery charging terminals. Both flaps on the back of the robot and dock would simple fall back down ad secured by the magnet's keeping the terminals covered and dust free...
These are only a couple of simple designs, but the idea was to keep things simple, safe, yet practical. I don't know if any of these ideas are of any use to you guys, but I thought I'd share them just incase.
So i'm a long ways from this stage in my project. But I have been thinking about this issue. (And automatic beer retrieval) I understand that the Roomba docks itself for charging. I don't want re-invent the wheel if i don't have to. Have yall played with their dock/program?
another idea for docking.
There have been many topics covering this with many many ideas.
Here's one which many others spawned from.
@SteveB I have and so has Steve S and Robot Doc.... If you search the cloud I have an example program that I posted that demonstrates some random (various) commands you can use to control a Roomba 500 and above....
It will be under my name when you use the filter function in the cloud....