
Doombot
Charging Dock Ideas
Repost :
@Everyone
I am designing a charging dock for my bot, and a lot of what @Rich said, I'm already doing in the background...I'm already in touch with a few great programmers willing to help - compensated of course. However I think we need to approach this problem from a different angle? If sensors or coding is so much work, why not do it from the engineering/mechanical perspective? I have a few ideas I'm drawing up, I will post this on the forum maybe we can all dissect it.
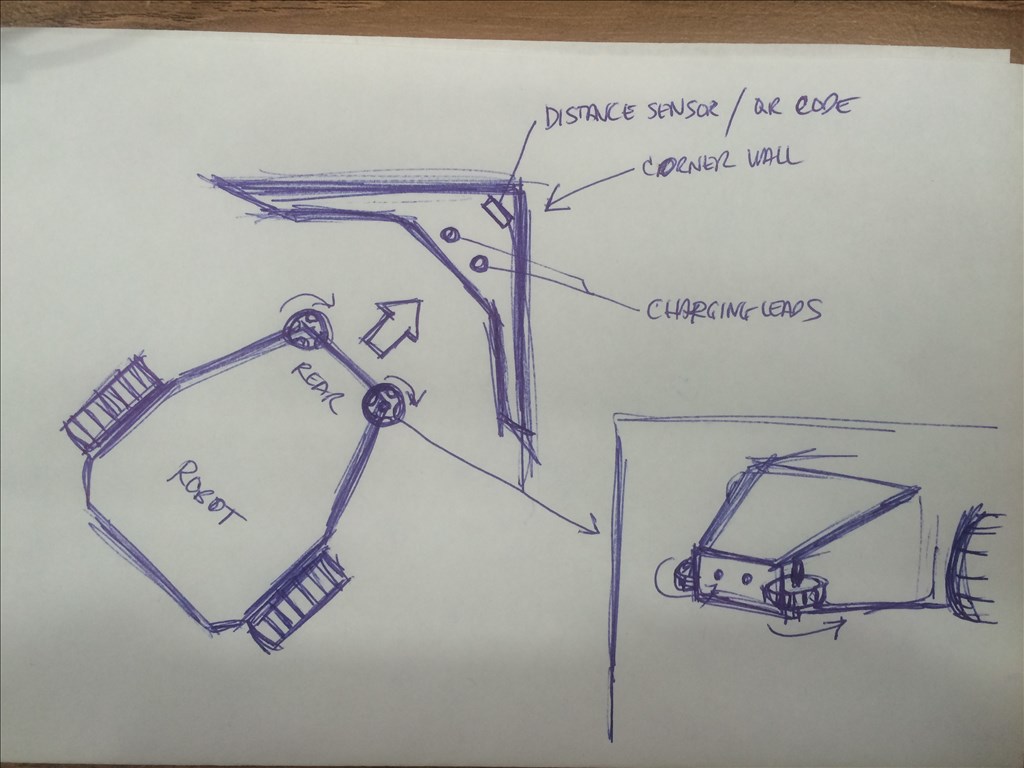
Here's one of them(rough sketch of course be kind):
I was thinking omni wheels going on the back of the bot, sideways, so all it needs to do is find the QR code or distance sensor, and the wheels would pretty much "force" the robot to go to the corner of the wall, where the charging leads could touch. we can do it to where the charging leads are hidden or have some cover on it, that will pop open (using the distance sensor) when the bot is within the vicinity. Any thoughts? This seems doable to me.

@Doombot.... The individual scripts are the way to do it man... With your scripts in segments (modules) it makes it far easier to understand later on... Plus it allows some scripts or modules to be used again (re-cycled so to speak) in other program segments...
To accurately turn a specific number of degrees, you will need a compass. Luckily EZ-Robot will have one for sale soon. Otherwise you have to turn for a certain amount of time, and adjust based in some ither sensor input until you are lined up.
Gyro sensor may also be a good adjunct to distance sensor to know you are in place (if you aren't moving, you must have hit the wall...)
Alan
@Richard R Yeah dude that's how I TRY understand things...I always use flowcharts...storyboards so to speak. One step at a time...the big picture all at once becomes overwhelming and I wouldn't know where to start LOL
@thetechguru
What about math? calculate the circumference of the 360 degree and calculate the speed and figure that in milliseconds? That should be accurate right? maybe not precise but close enough, that's why i came up with the wheel on the sides design to "correct" the bot if it's a little off....
@Alan... Bingo, a compass would work well enough but I was thinking a gyro would be even more accurate for turning...
@Doombot... It's pretty straight forward if you use a gyro... you take a reading from the gyro (would be awesome if you could reset the gyro at this point to 0 prior to the turn) before the turn... and since you have already determined from testing, you will know how far to turn until the gyro reads that number that equates to a 360 degree turn or whatever...
For example say your gyro starts a 0... from testing you know that when your bot turns 180 deg the gyro reads 1000 (I just made this number up, the actual value will have to wait until I get one)... So your bot begins to turn while you monitor the gyro variable and when it his 2000 you have completed a accurate 360 deg turn... So now you stop the turn and begin your back up....
The cool part is it gyro readings are relative so it doesn't matter what direction your bot is facing it will always turn the required amount.... So you don't have to worry what corner of the room you put the docking station in...
@Richard R I use the same principle on the potentiometers on my bot's shoulder motors...
@Doobot... yep, you got it... Gyros are continuous too and can keep turning until your hearts content... plus they don't have to be attached mechanical to the axis of rotation...