Doombot
Charging Dock Ideas
Repost :
@Everyone
I am designing a charging dock for my bot, and a lot of what @Rich said, I'm already doing in the background...I'm already in touch with a few great programmers willing to help - compensated of course. However I think we need to approach this problem from a different angle? If sensors or coding is so much work, why not do it from the engineering/mechanical perspective? I have a few ideas I'm drawing up, I will post this on the forum maybe we can all dissect it.
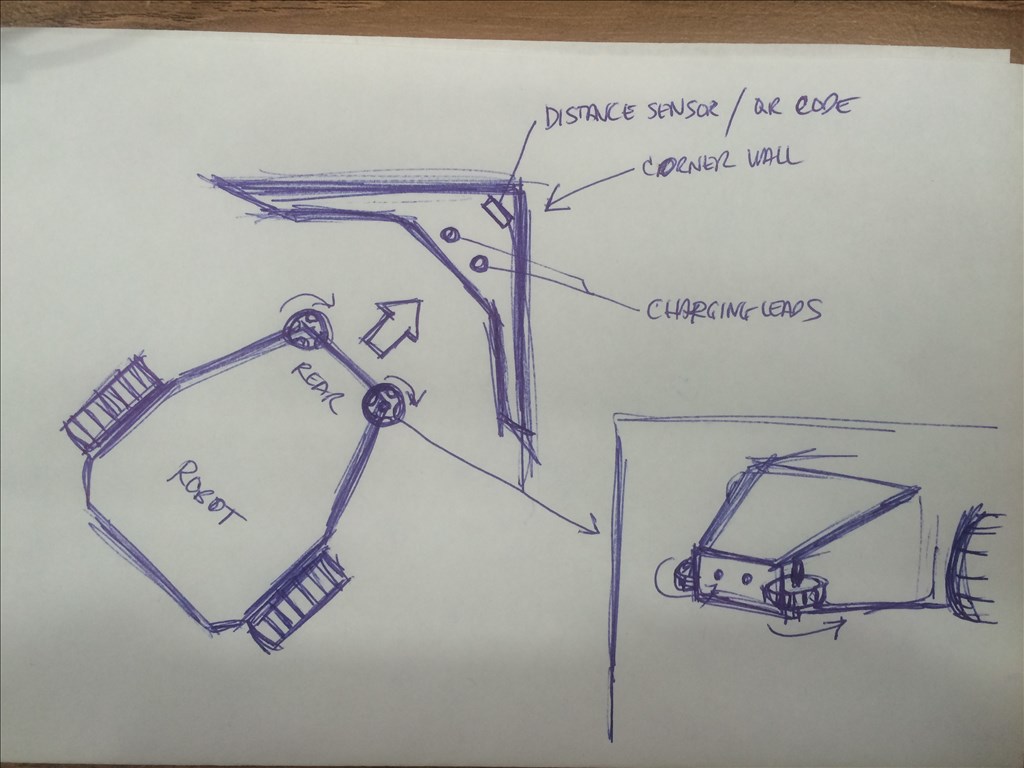
Here's one of them(rough sketch of course be kind):
I was thinking omni wheels going on the back of the bot, sideways, so all it needs to do is find the QR code or distance sensor, and the wheels would pretty much "force" the robot to go to the corner of the wall, where the charging leads could touch. we can do it to where the charging leads are hidden or have some cover on it, that will pop open (using the distance sensor) when the bot is within the vicinity. Any thoughts? This seems doable to me.

@Steve G I am so glad your bot design doesn't have your robot dock facing forward. It would however, be a very unique way of recharging if you know what I mean....
@Richard.
Lol, come on now, this is a family friendly forum.
@Steve Hey, I didn't say I didn't like it....
@Doombot ... sorry dude, didn't see your post #20.... You'll still need pots as you been using them (as Alan mentioned).... The gyro is good to provide the "general" orientation of the entire bot.... It lets the bot know where it is in'space' relatively speaking...
@Steve & @Richard, front facing appendages for charging have been mentioned before and believe it or not, similar thoughts were posted
It is very simple to just use a Nail with a spring.
Loki is still the benchmark of homemade robots.... Brilliant design and programming...
@Rich.
That doesn't supprise me at all, lol.
I do love the design of Loki. I saw that video some time back and thought to myself, "I want to do something like that".