
Doombot
Charging Dock Ideas
Repost :
@Everyone
I am designing a charging dock for my bot, and a lot of what @Rich said, I'm already doing in the background...I'm already in touch with a few great programmers willing to help - compensated of course. However I think we need to approach this problem from a different angle? If sensors or coding is so much work, why not do it from the engineering/mechanical perspective? I have a few ideas I'm drawing up, I will post this on the forum maybe we can all dissect it.
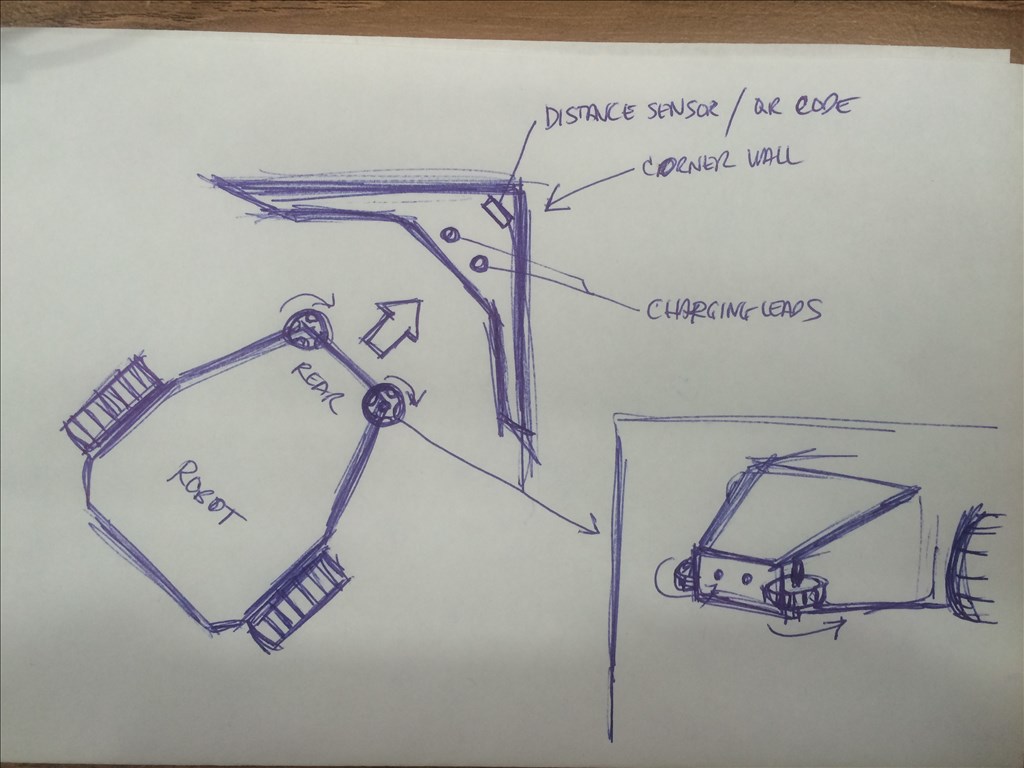
Here's one of them(rough sketch of course be kind):
I was thinking omni wheels going on the back of the bot, sideways, so all it needs to do is find the QR code or distance sensor, and the wheels would pretty much "force" the robot to go to the corner of the wall, where the charging leads could touch. we can do it to where the charging leads are hidden or have some cover on it, that will pop open (using the distance sensor) when the bot is within the vicinity. Any thoughts? This seems doable to me.

@Steve... The indoor nav that Loki does is just simply awesome.... I got Andrew to navigate around my kitchen island, but that is very basic.... One of my goals is to have complete room to room navigation like Loki can do.... It may be a stretch for my programming abilities, but I am going to give it a shot....
@Doombot... as Rich said here is a link to a topic I started long ago about Automatic Battery Charger Docking that had a lot of ideas that may inspire you.
@Richard R cool man...Loki is great but I ABHOR that design. I don't get why everyone likes the Johnny 5 - Wall-E - Omnibot head design. Serious engineering and programming on that guy though...I love the chain sprocket shoulder design he did...It actually reminded me of that bot from that 80's movie Evolver or something like that...
@rgordon I missed that topic from a while back I guess...
Here's the question, has someone actually got to do this and get it working? With the exception of possibly having to use a Roomba...
I think @pacowang is actually doing something, not just talking possible solutions.
Alan
@Doombot Not that I am aware of. Although there are many methods discussed in that topic.
That is fine if the robot will stay in the same room all the time. But, what if it has wandered all the way to the back bedroom area when his battery runs low and the charger is several rooms away? This is what eventually bogged down the thread I started 2 years ago about this. The robot needs to have a way to know what room it is in so that it can plot a direct course to the charger and also avoid obstacles along the way. This may can be done in a number of primitive ways such as Glyphs or QR codes posted in strategic places around the house or IR Beacons that flash a specific room code with a detector on the robot that reads these flash codes and determines what room it is in. But most people don't want to plaster Glyphs all over the place or have a beacon in every room (which has to be clearly seen by the robot from most anywhere in the room).
If it knows what room it is in then, a script could run based on this info. Say it was roaming around and it detects that the batteries are running low. Using some method it determines it is in bedroom #3. "OK, I am in bedroom # 3 so i need to head East to get to my charger."First it would have to find its way out of the bedroom (which may not be in a East direction). Then, after it is out in the hall, it determines..."OK, I have exited the bedroom and I am now in the hall." " I need to turn right and move down the hall and find the kitchen." Then it has to find its way out of there and so on and so on......
We desperately need some form of room mapping/ localization /navigation system or our autonomous bots will be stuck living in one room or be found out of battery power in some dark corner of a back room.
Maybe someone here on the forum or DJ and his team will work out something in the near future.
@rgordon.
You do bring up a good point. Here's an idea I'm throwing out there. This could be based on two separate location sources. An inferred beacon (close quarters) and a WiFi signal of sorts (long distance) both located on the charging station dock. A 2.4g Wireless signal can cover quite a large area (depending on the quality of router) which as we know can flood different rooms.
So here's the Sanrio. A robot is roaming around in one room. It detects that it's batteries are running low and activates a WiFi locator script. From here the bot would follow the strength of the WiFi signal, navigating towards where the signal is strongest which is where the docking station is (like following the signal bars on a cell phone. The more bars that light up, the robot knows it's getting closer to the dock). This would help the robot determine where it needs to turn left, right, go straight ahead just by following the strength of the signal. Once the bot is in the same room as the dock station, the IR beacon would take over and do the precision guidance so the robot can succsessfully dock and charge.
It's a bit of a cruid discription, but I hope you get the idea. Is this a fesable idea?
cant you use more dockings?