
Doombot
Charging Dock Ideas
Repost :
@Everyone
I am designing a charging dock for my bot, and a lot of what @Rich said, I'm already doing in the background...I'm already in touch with a few great programmers willing to help - compensated of course. However I think we need to approach this problem from a different angle? If sensors or coding is so much work, why not do it from the engineering/mechanical perspective? I have a few ideas I'm drawing up, I will post this on the forum maybe we can all dissect it.
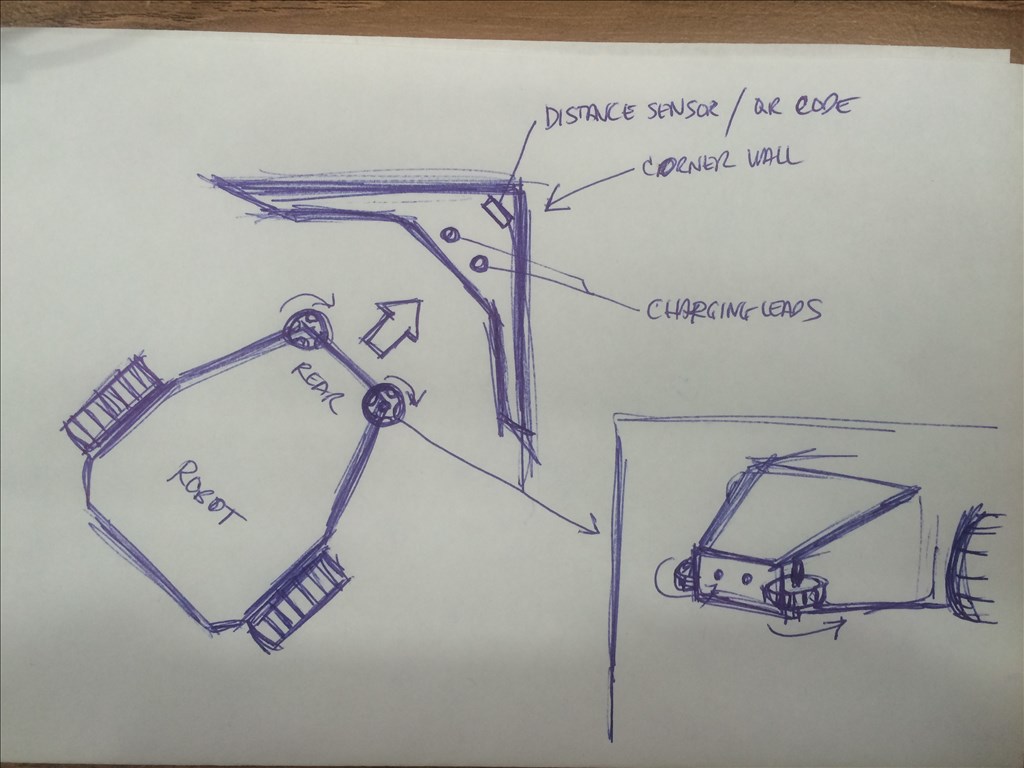
Here's one of them(rough sketch of course be kind):
I was thinking omni wheels going on the back of the bot, sideways, so all it needs to do is find the QR code or distance sensor, and the wheels would pretty much "force" the robot to go to the corner of the wall, where the charging leads could touch. we can do it to where the charging leads are hidden or have some cover on it, that will pop open (using the distance sensor) when the bot is within the vicinity. Any thoughts? This seems doable to me.

@nomad.
You could, but I'd say It would depend on the size of robot and docking station. For smaller robots then yes, that would be a good idea. But personally if I had a full size robot (like I'm planning on building), then I wouldn't want large docking stations dotted all around the house taking up room and power sockets. Just the one station tucked away in the corner of a room.
The docking idea I mentioned is based on an idea I had that I posted about an additional feature that could be added to ARC. Much like a mobile/cell phone or laptop/tablet has a signal strength indicator in the corner of the screen, a control in ARC could display the current status of the WiFi signal in either AP or Client mode in a numeric value or bar graph indicator.
This then could be scripted for autonomous or manual control where if the robot roams to a place where the signal hits one bar, it would do a 180 about face, and head back to the last known stronger signal location. Also useful for debugging EZ-B disconnection issues so you would know if it was due to weak signal or not, thus narrowing down the variables of the disconnection issue. The docking station idea works on the same principle, but instead of avoiding a weak signal, the bot navigates towards a stronger signal.
steve g
ah i see
Design a robot and charging station so it can swap out a dead battery for a charged one.
Have a small backup battery to keep the ez-b powered while the robot is swapping out the batteries.
You're back to step one. The robot has to find the battery changing station robot to have the battery changed.
Food for thought.....
Docking Logic Chapter 1
Docking Logic Chapter 2
Docking Logic Chapter 3
Docking Logic Chapter 4
Docking Logic Chapter 5
Docking Logic Chapter 6
Haven't checked your links yet @rgordon, but some more good for thought. I think there is a lot of promise for location recognition and navigation back to home using hte EZ-B integration to Roborealm. Specifically the AVM module.
See https://www.roborealm.com/help/AVM_Navigator.php
I want to start experimenting with this, my only issue is that you used to be able to use Roborealm on two computers, one development and one embedded, but now need a separate license for each, so that is a more significant investment to experiment with a function that DJ is more than likely going to build into ARC at some point.
Alan
@Alan... I too am going to be looking into just that very thing since I also have roborealm and the avm module...
About the lic thing... If I had of known that before I bought a copy I would have installed roborealm on a different computer. I have it on my desktop but I wish I had installed it on my laptop for obvious mobility reasons...
@Richard, you can move it from one computer to another. You need to uninstall it from one, and then install it on the other, and sometimes send an email to their support if the license gets "stuck". It is the installing on two at once that is an issue.
Alan