
Robot Building Questions

Synthiam Credit
Log In

Earn Free Credit
Share your robots, answer questions, and help others — earn credit toward ARC Pro, AI credits, and robot swag.
Exosphere
What is Exosphere?

Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Synthiam Swag
See All Swag

I Make Robots Crew Socks
Recent Robot Skills
View All

Autonomous AI
Autonomous AI robot agent with vision, speech, movement, animations, memory, and self-directed task...

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

Featured
TCP video server for Unity clients to stream camera video and send servo positions to ARC for remote robot control

Featured
Meet Mr. Spider Sapian and Spider Bot, the fastest bot on four legs.
question

Powering Mini/Micro PC With Lipo
Hello, Does anyone power there mini pc with a lipo? Example would be a Beelink computer. If using lipo, what voltage do you have? Thank you
Jeremie |
question

Wheeler Chair Robot
I saw that last year somebody had built a wheel chair robot?. My idea for the new Robot will be as a stage mascot that can also pretend to play the drums on stage. My brother has a...
robo rad |
question
Is There Anyway To Control A Dc Motor Like A Servo?
Is there anyway to control a dc motor like a servo with position feedback using ACR an Arduino?
Nink |
question
Servo Control
How do I reset all servos and calibrate each servo? I am performing the initial JD Humanoid Robot assembly, and after the assembly, I connected JD to WiFi and then started on the Servo setup. I had to stop the process because one of the arms was not in the correct orientation when attached. Can I restart the servo calibration positions?
DJ Sures |
question
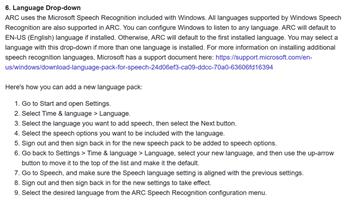
Speech Recognition - Language Issue
Hello everyone, I've recently been experimenting with different languages for my robot. English and Mandarin are working fine and amazing, but I'm...
Athena |
question
How To Write The EZ-Command In Python
Hi, Can I know, how to write the ("Speech Recognition", "PauseOff") command in python? Thanks in advance!
rickymahk2013 |
question
Invert Direction With A Script
What is the script to Invert direction pragmatically for V1 and have it change the checkbox in Setting for the V1 port at the same time?
Automation Man |
question
How To Create Robot Skills?
Using an external API to generate Speech-to-Text (STT) as a robot skill. I don't know how to create an external skill even if I click on 'Create External Skill.' I want to input code to fetch data from an external API and apply it to the robot. "How do I apply an external API to the robot by entering code?"
DJ Sures |
question
4 Pin Ultrasonic Sensor Iotiny
Hello can you use a 4 pin ultrasonic sensor, like the SR-04, with the iotiny and if so how would it wire up? I'm guessing it would use 2 digital ports on the iotiny. Thank you
Athena |
question
How To Write The Audio.Say In Python
How to write the code in Python for "audio.say" to instead "print(text)"? import time import random def SayWait(text, wait_time): print(text) time.sleep(wait_time) # Story 1 def story1(): SayWait("Once upon a time, there was a dear little girl...", 1) # Story 2 def story2(): SayWait("What a tender young...
rickymahk2013 |
question
Monitor The Serial Communications Between ARC And An Arduino Board
Is there a way to monitor the serial communications between ARC and an Arduino connected by USB?
Nink |
question
Can See Camera On The Wifi But Not The Actual Board
I have an Ez-B Tiny. On the wifi the 'camera' shows up but not the board - although it did previously. Why?
Athena |