Tutorial
Published
— Updated
Step 28 of 34
Step 27
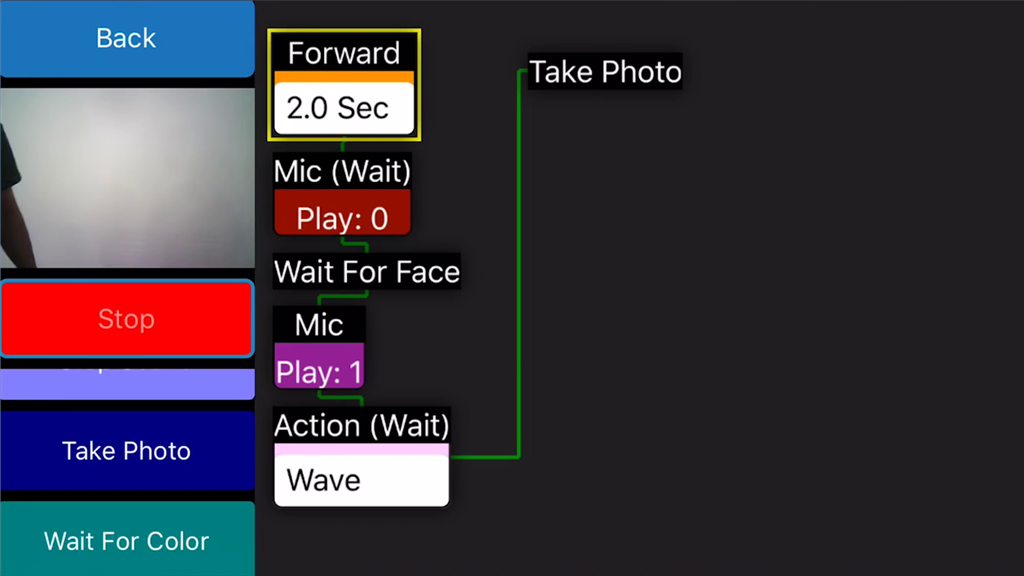
This code will make the robot walk forward for two seconds, play an audio clip, wait for a face to be detected, and then play another audio clip while waving. When the waving is complete, the robot will take a photo. Click on the Start button to execute the code. Follow the highlighting and the green line to view the execution progress.