
























hi all
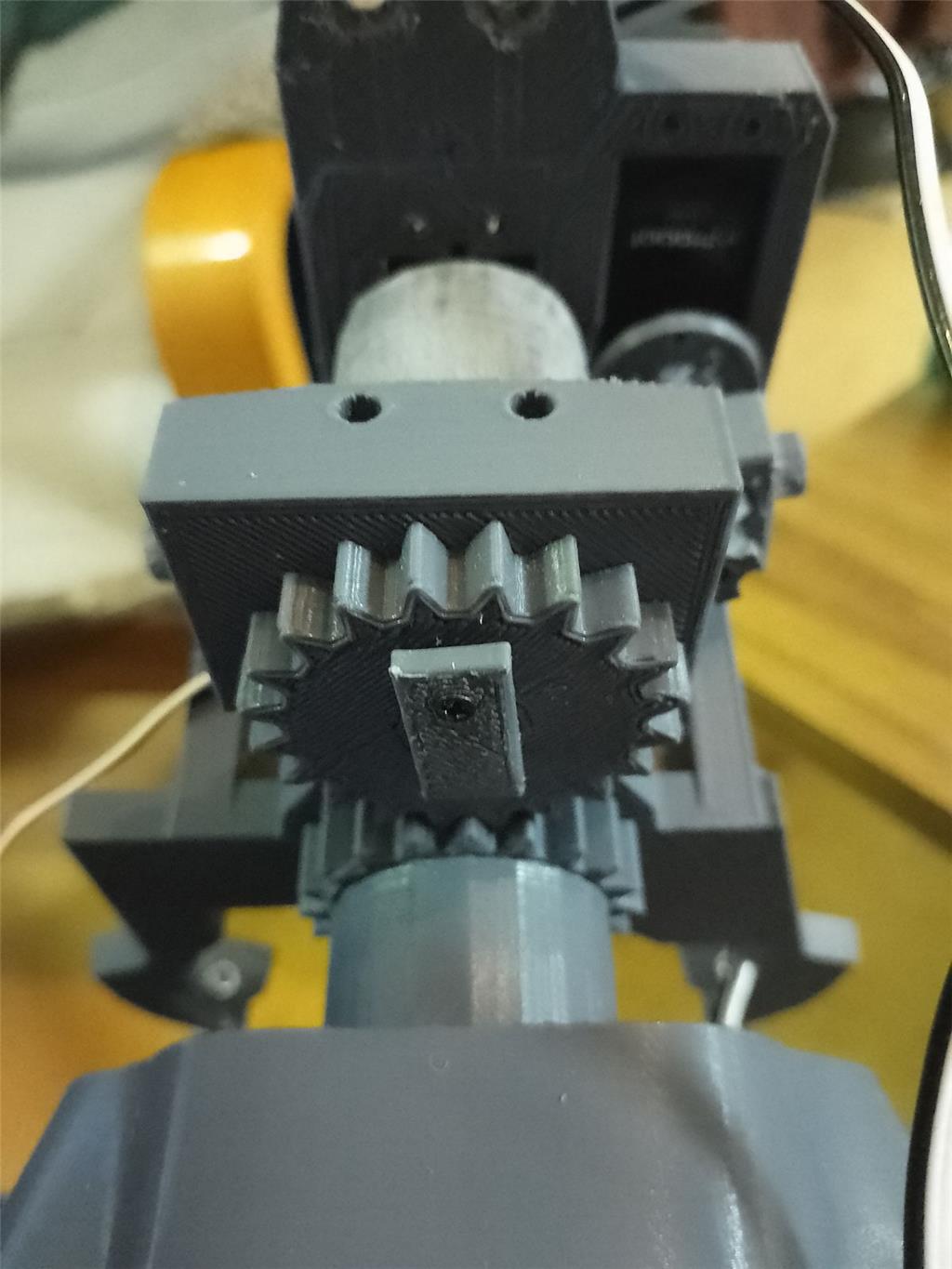
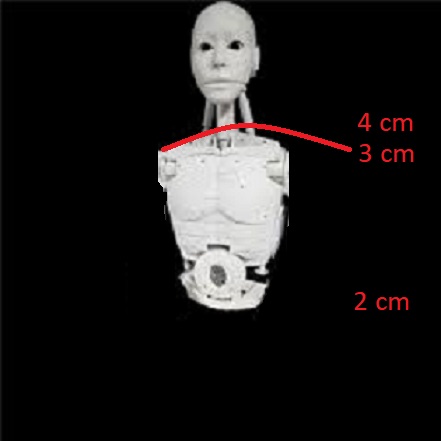
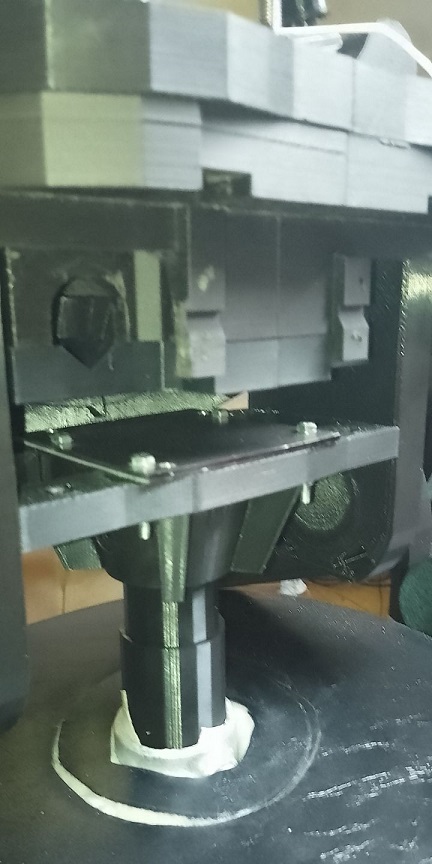
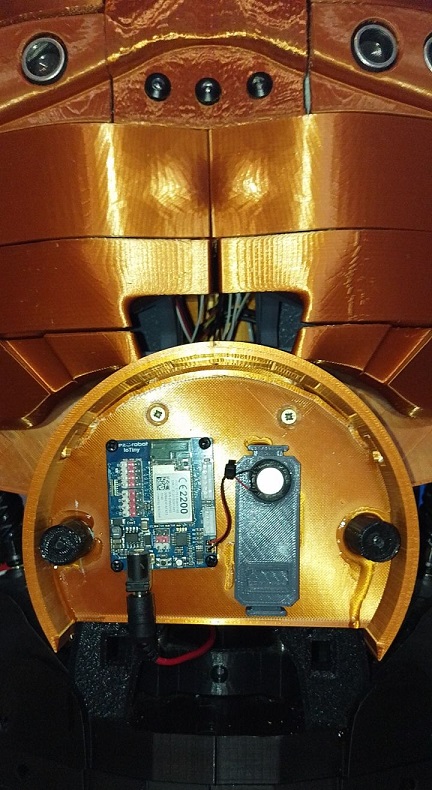
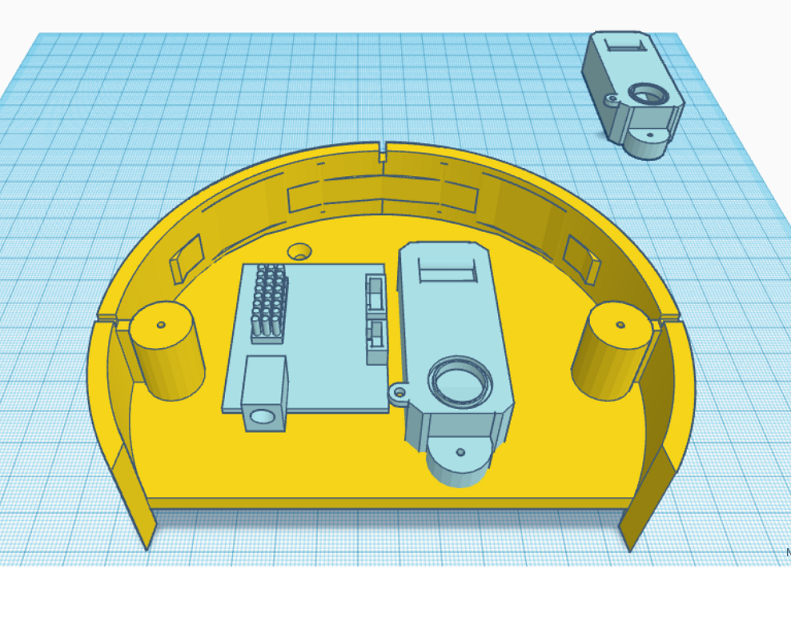
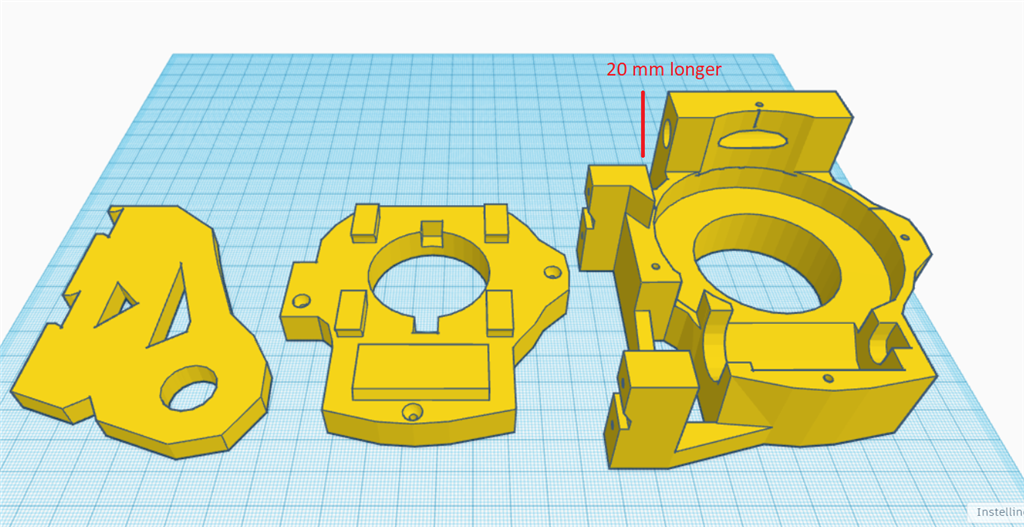
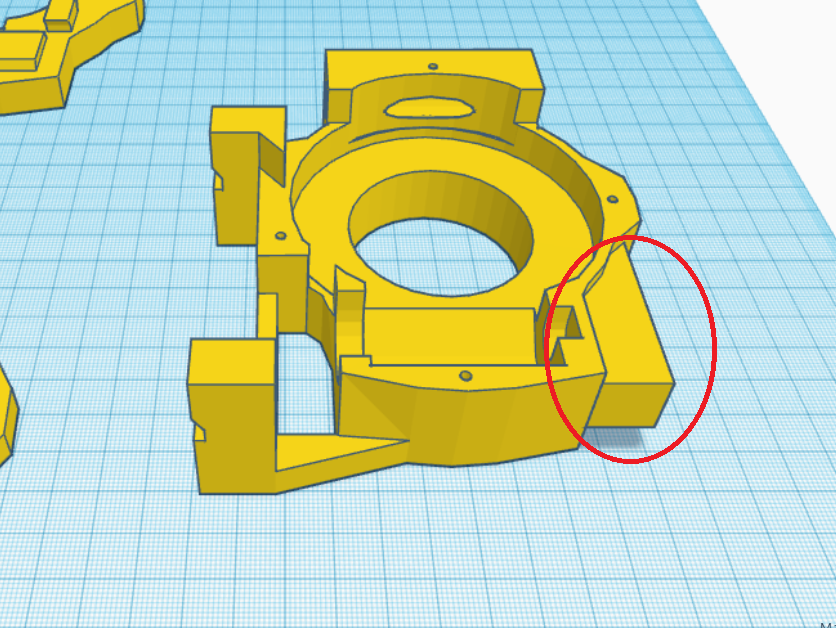
I've created a modified version of the EZ Robot head, featuring both side-to-side and up-and-down (yes) movements. This new design includes an improved base for the head, accommodating three additional HDD servos. There's an option to install two cameras, with the base designed to allow passage for a second camera cable. This setup is ideal for incorporating additional IoT devices or EZBV4, for instance, for LED lighting. Conveniently, there's no need to remove the potentiometer from a servo, as the 1 to 180-degree range provides ample movement. The base height is 7.2 cm.
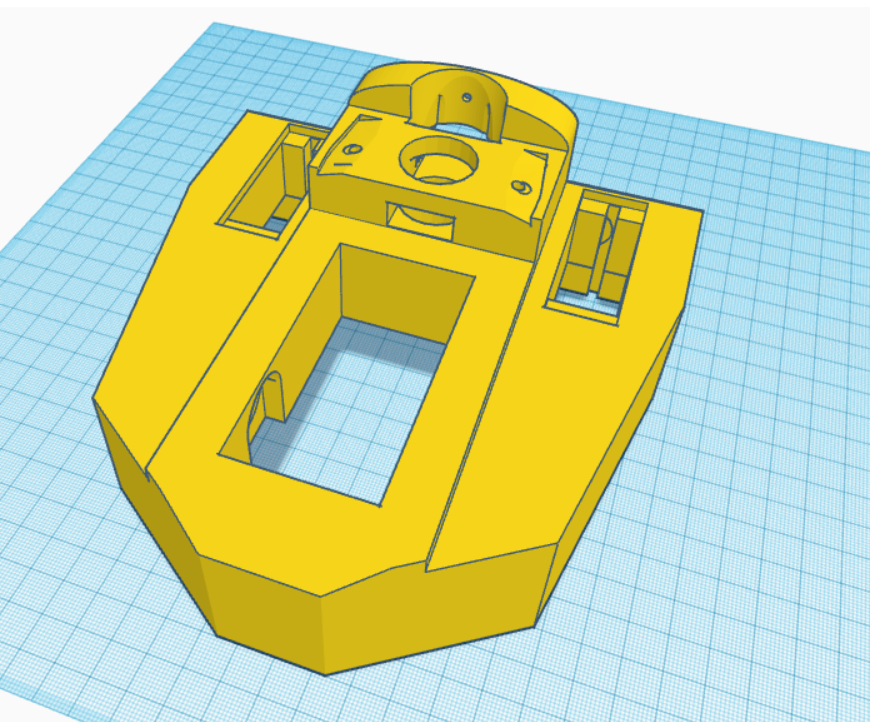
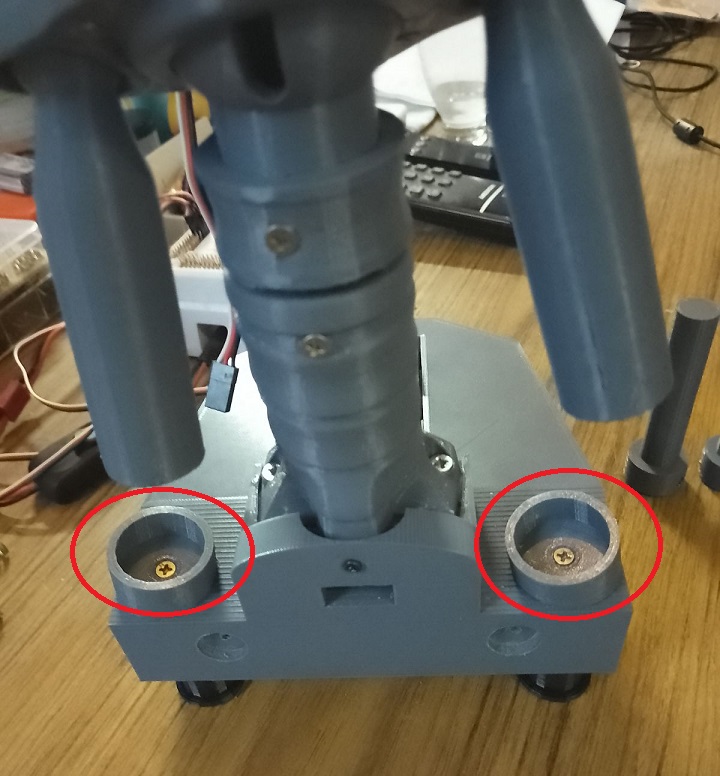
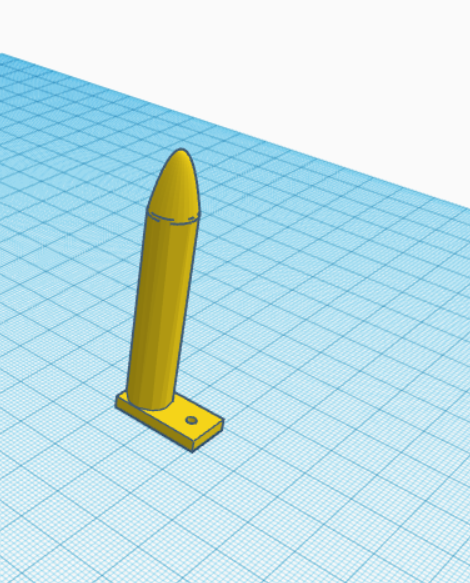
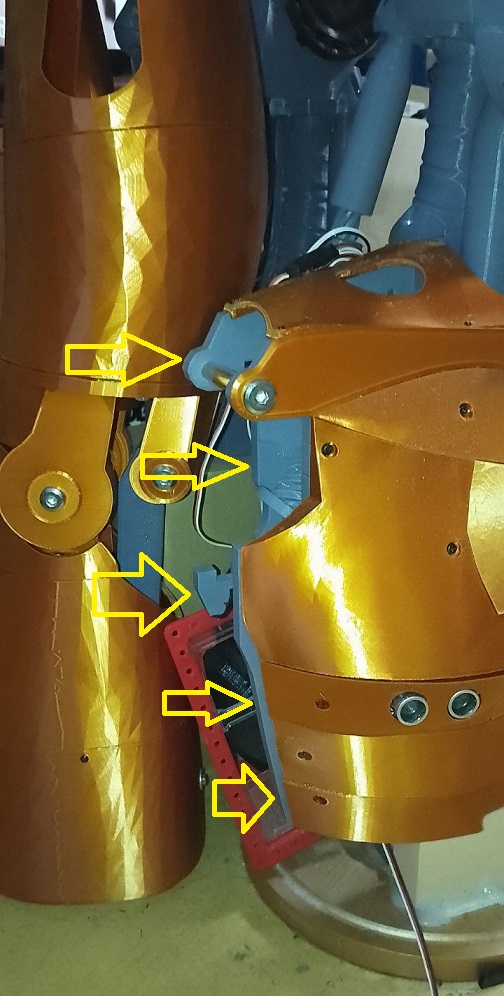
The pistons are original components from InMoov, and the neck base in EZ Robot is correctly designed.
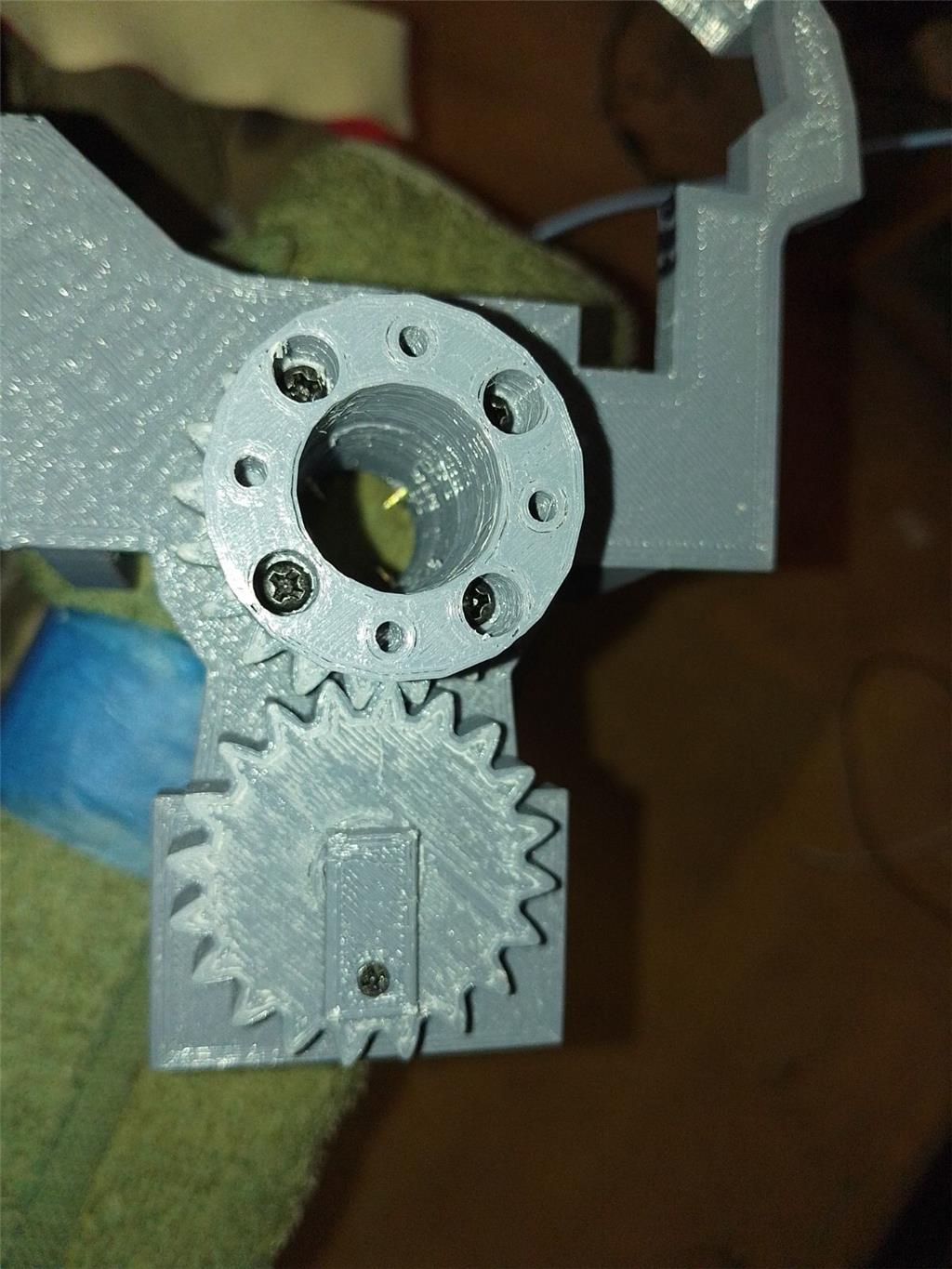
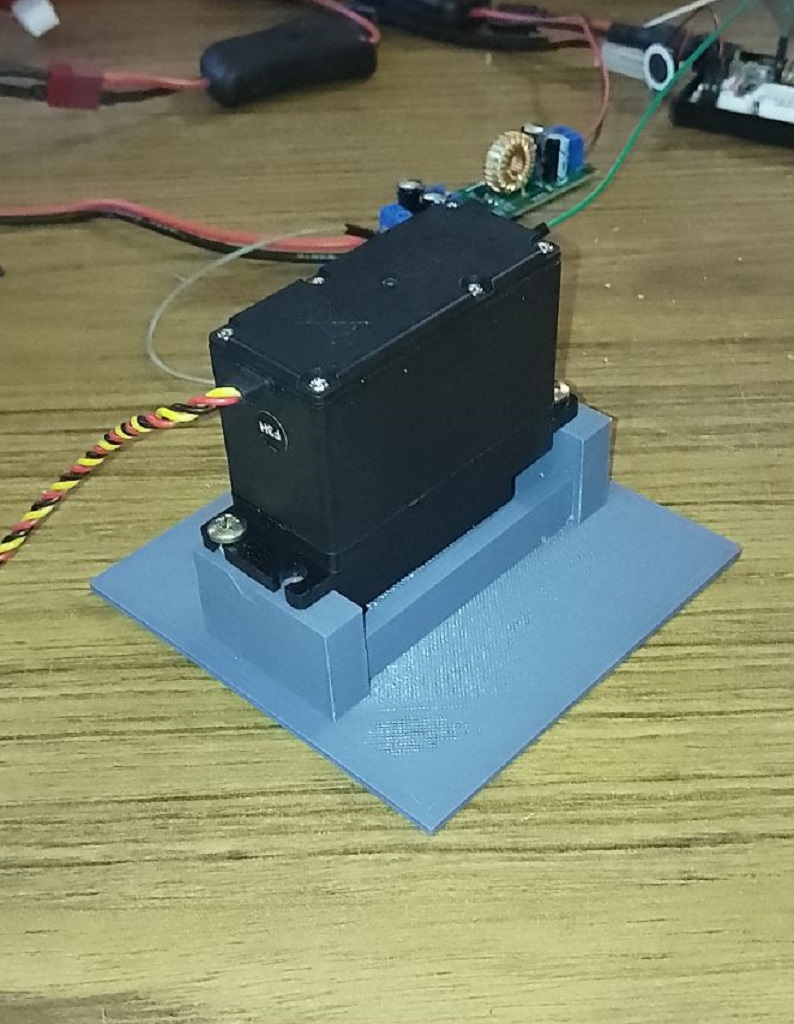
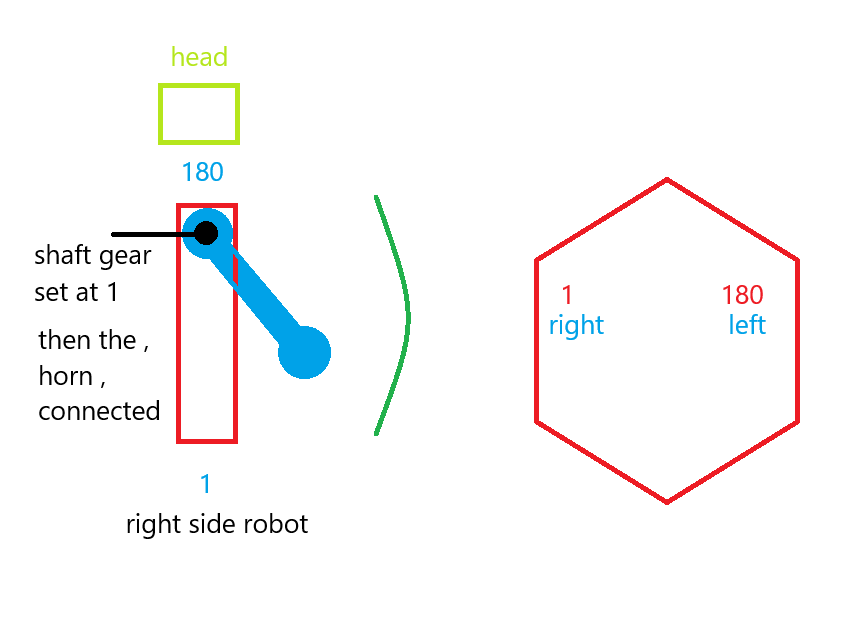
For moving the side pistons, adhere to these settings:
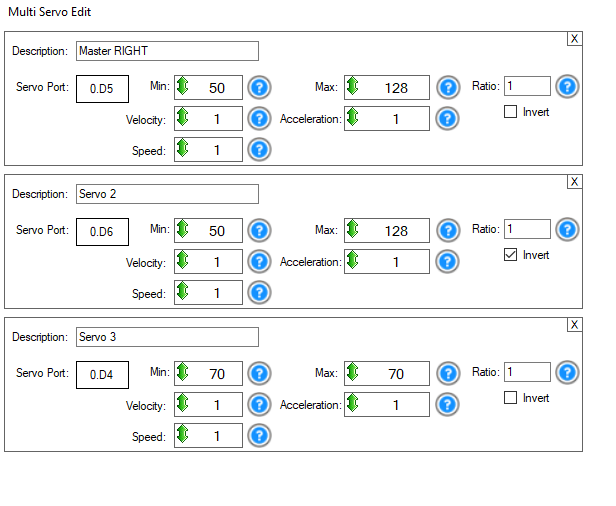
Programming
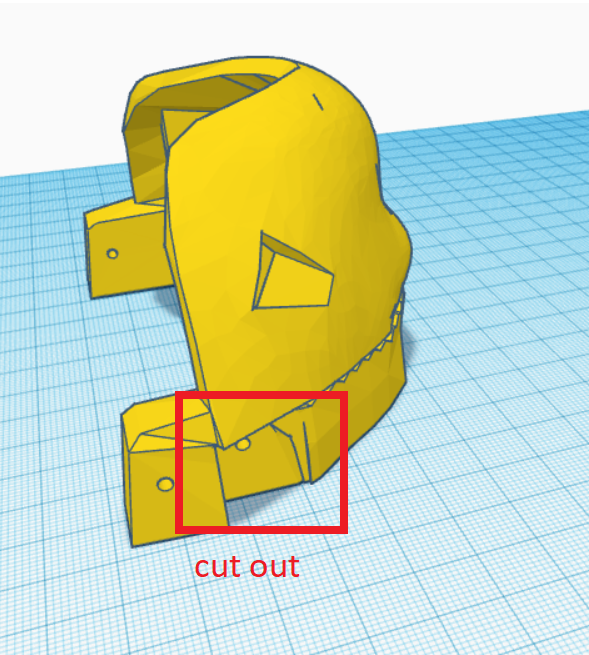
Adjusting the side pistons can be a bit complex. Start by calibrating your HDD servos. Then, align the inner piston with the holes in the piston base and secure it with a screw. For the second side piston, align it similarly, then disconnect the IoTiny. This allows you to manually adjust the previous piston to properly position the second one. The original documentation on EZ Robot is extremely helpful in this process.
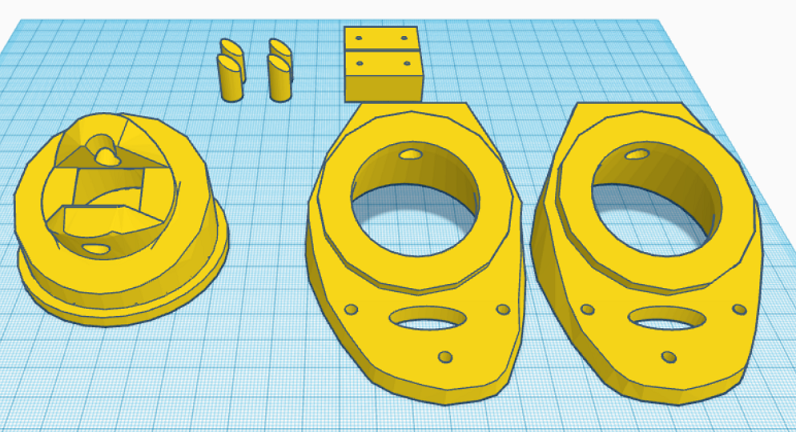
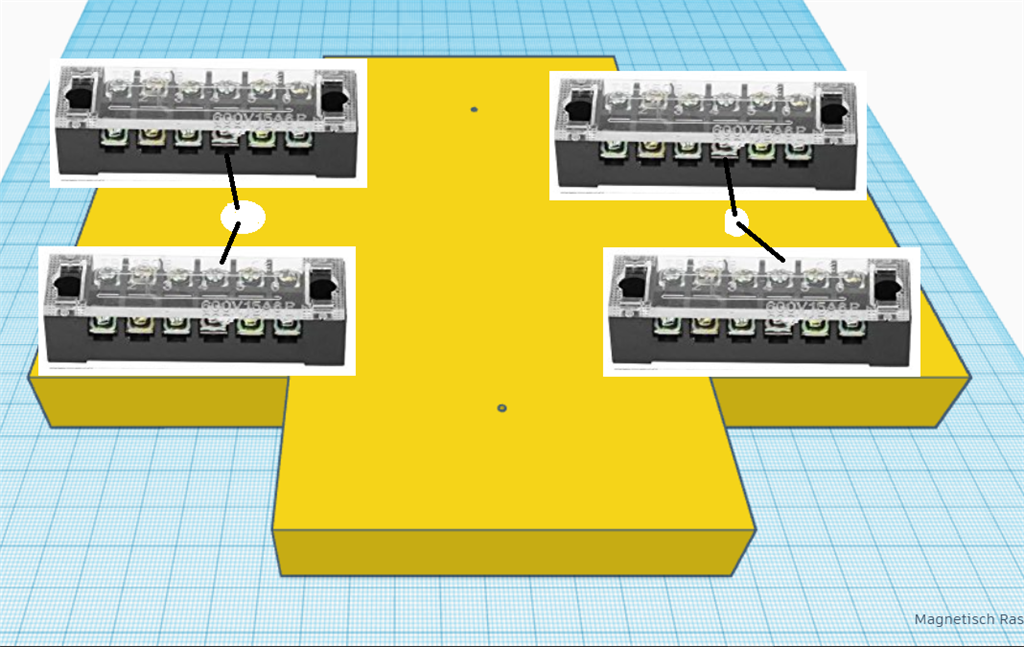
Parts & Materials
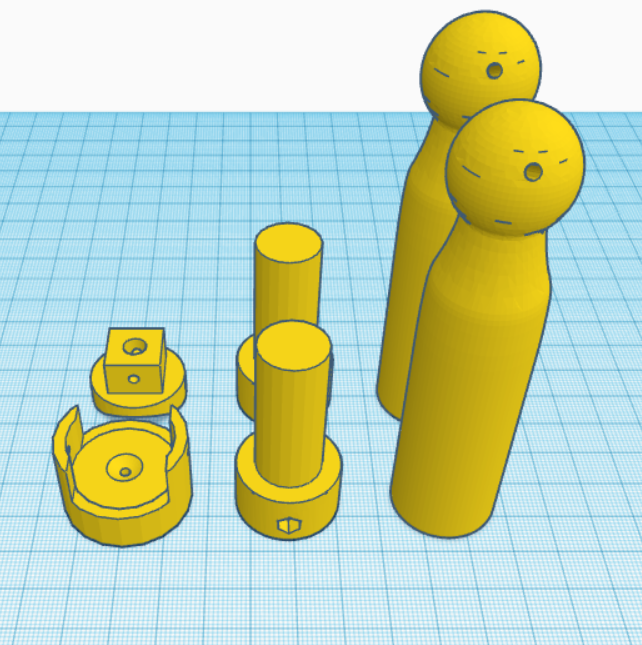
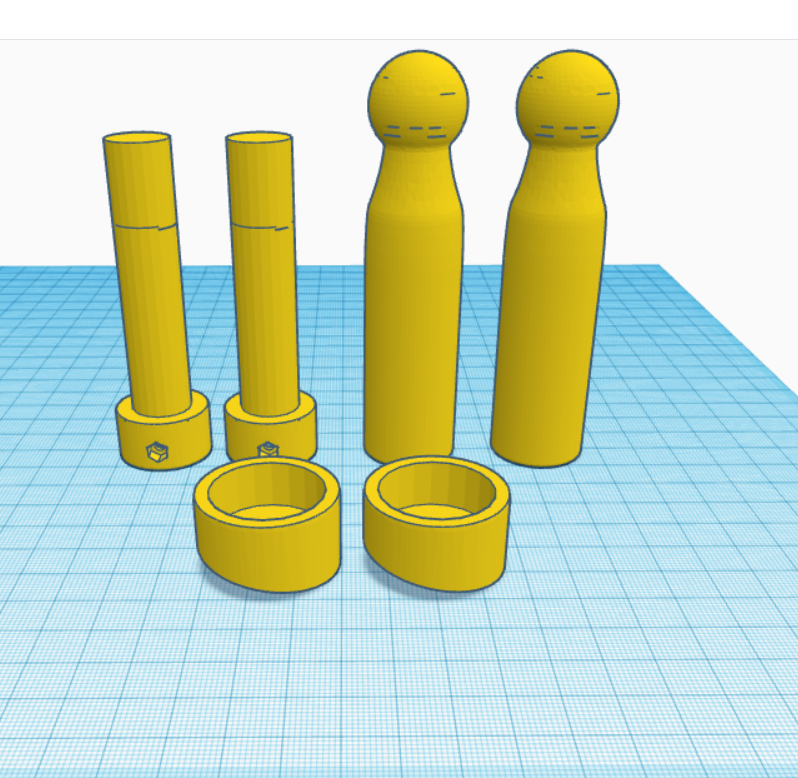
You'll need 3 extra HDD servos and grey PLA filament. The drive shaft parts should be printed with a 35% infill and a gyroid pattern in your slicer for enhanced strength. Other parts can be printed according to your preferences. Additionally, there's an optional neck extension, offering one to three extra vertebrae for more piston movement space. In my experience, the two-vertebrae option works best.
Discover more robots

Therat's My Own Wall-E

Rb550f's Ez Robot Attacknid


hi
some progress the inmoov . left&right shoulder reddy +left upper arm .
https://www.youtube.com/shorts/jCJAr03YZfc
some new stuf i notest on the HS-805BB red lines . dont know yet what its for .
well if you not doing something you cant brake stuff . main shaft broke off . easy and cheap fix .
That robot is starting to look impressive. It's coming together nicely.
That red line is probably the gasket between parts. They used red ones instead of black. My guess.
hey dave
red gasket it looks cooler . yeach the printing stuf is comming to an end . then comes the real stuf .
hi
a little progress to see how it will look . the wrist part will come in copper coller .
https://www.youtube.com/shorts/hq3AKQ19LlU
[u]hi
[/u]doing some finger testing .xD
https://www.youtube.com/shorts/RMzFRi9XuKQ
hi
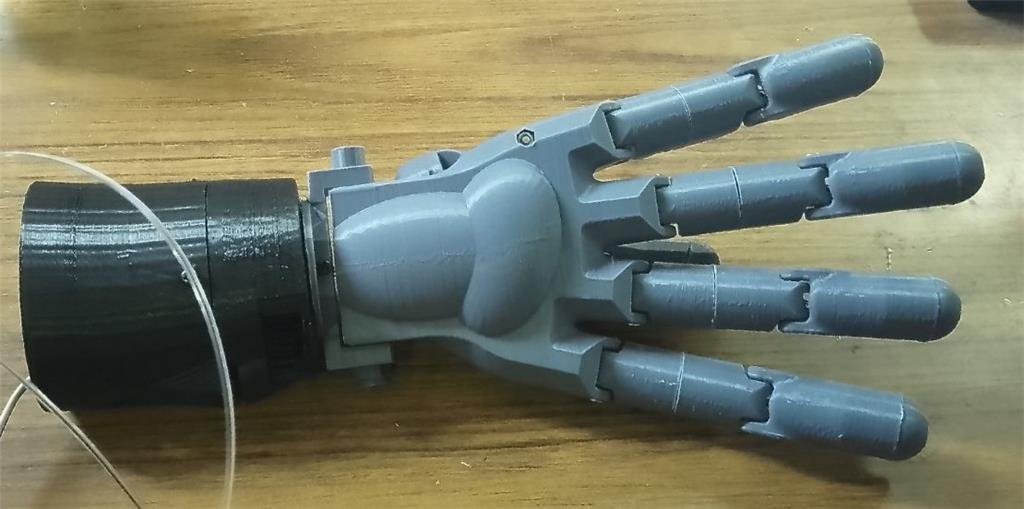
two hands reddy from inmoov . i found another hand that looks very interesting . hand from pib robot . also free for download. hand with springs very solid .
inmoov hands
https://www.youtube.com/shorts/1hMAbPrUFuI
pib robot
https://www.youtube.com/watch?v=lOv2MGlrl8k
Nomad you’re doing awesome work! I’m impressed. The pib robot hands with springs look like a good idea. The InMoov hands have always been a bit awkward.
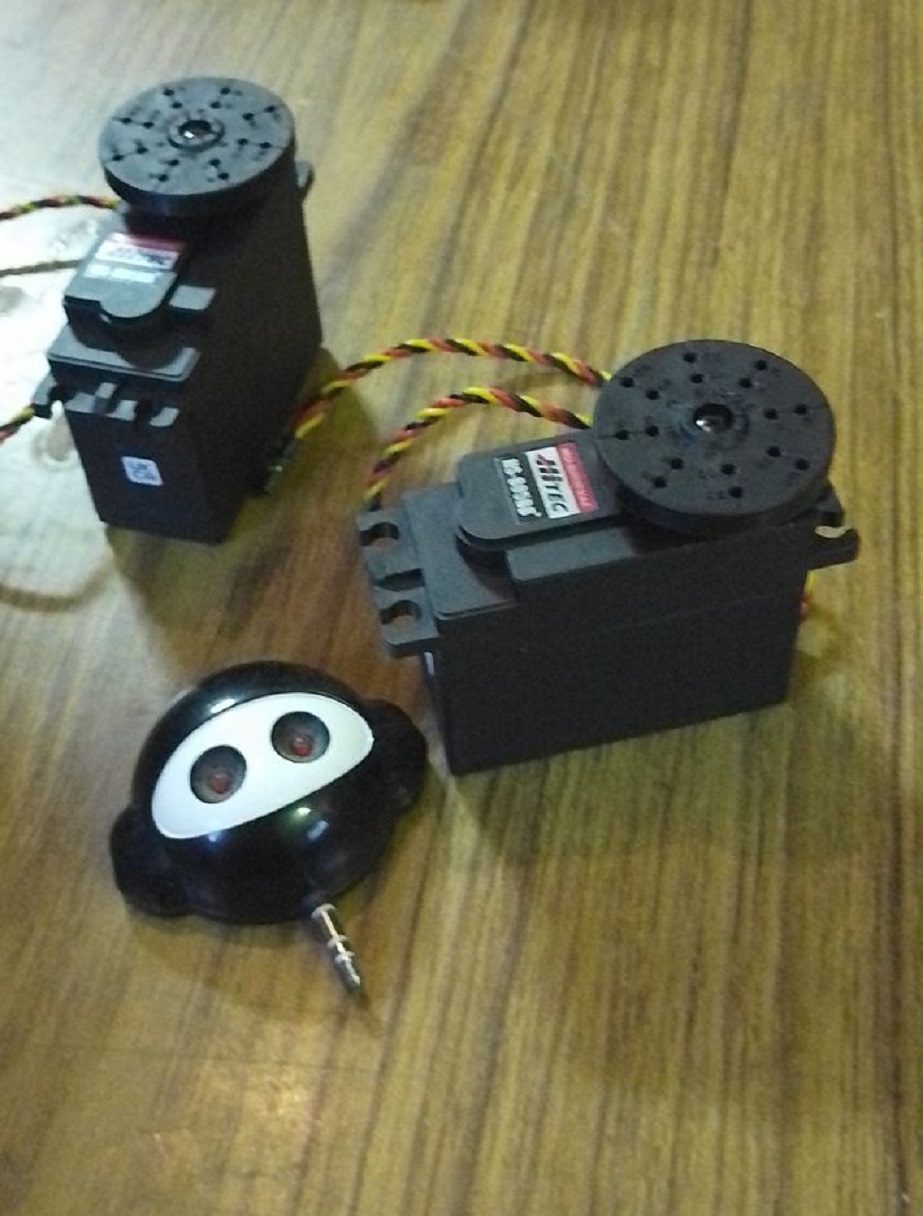
I received your package in calgary btw. It’s servos that you’re using. They connect to the ezb so I’m gonna leave them with Jeremie. He’ll be able to tell yoj more about them.
I can say the one servo not in a box is burned out. You can smell it and it turns difficult.
hi dj
the design of the pib hand is awesome . all fits like a glove . great tutorials like yours too . i'm making a hand + arm to see how it looks and works . similar size as inmoov hand .
the one servo that got burn out in 7 minutes with an ezbv4 . they are the extended range servo's jeremie will have fun with it .
sorry late respons . my telenet has no sound for incomming mail .
https://pib.rocks/build/#instructions