
























hi all
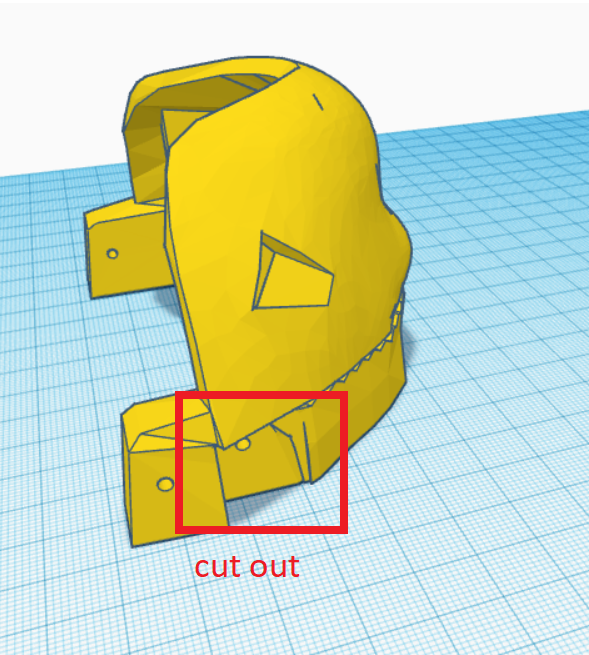
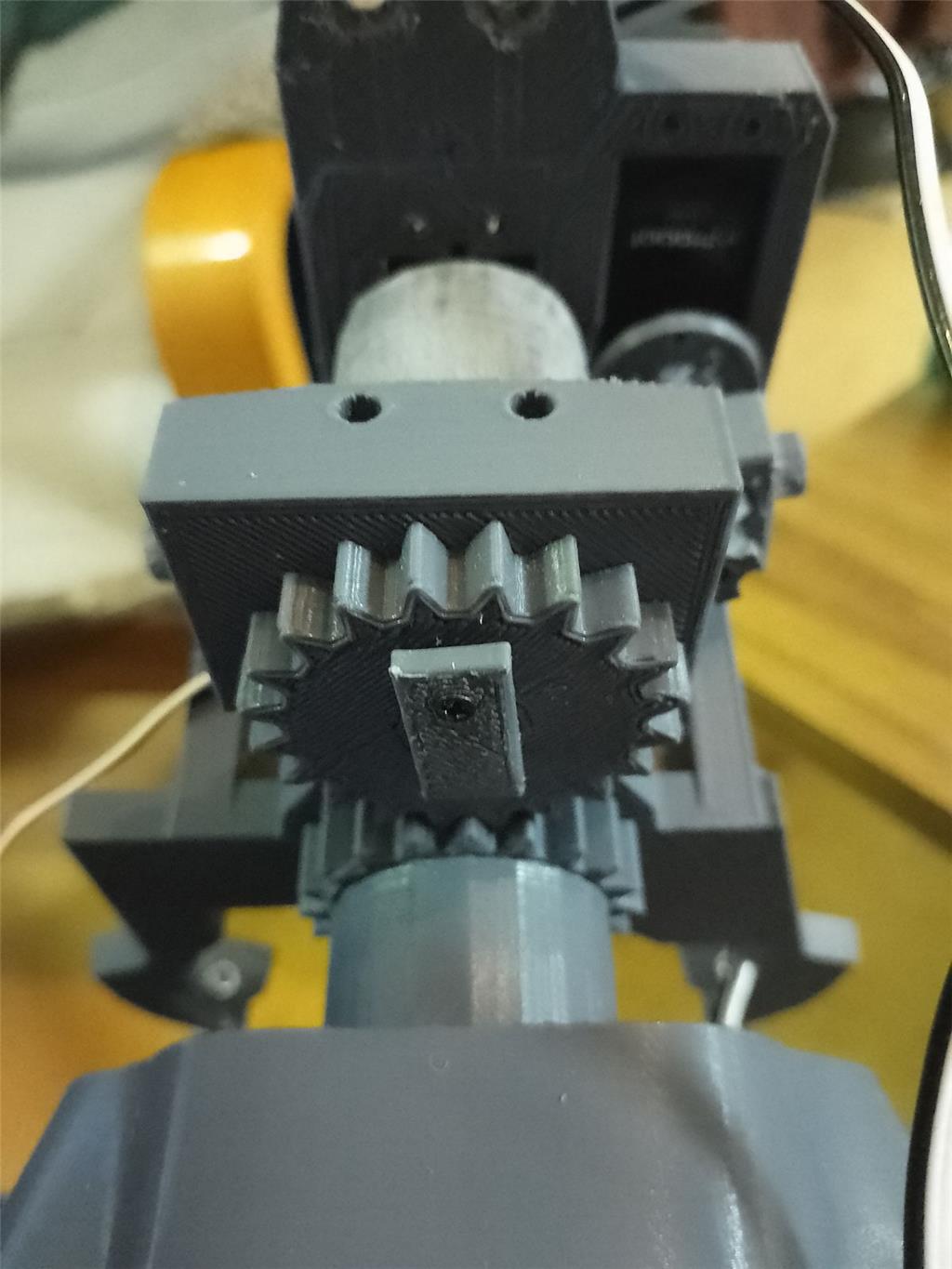
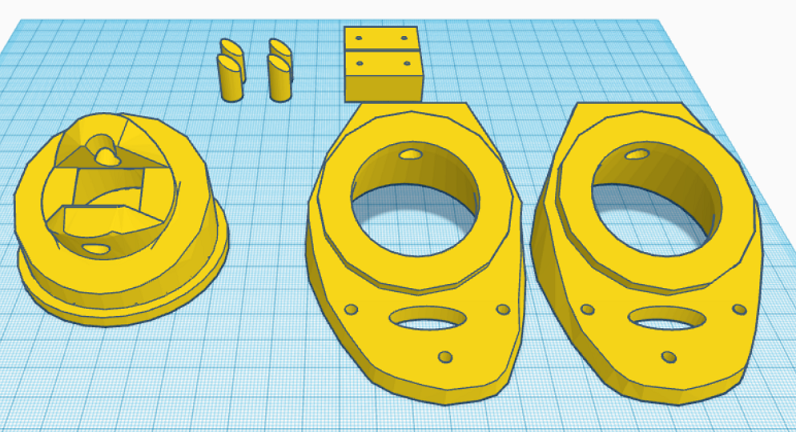
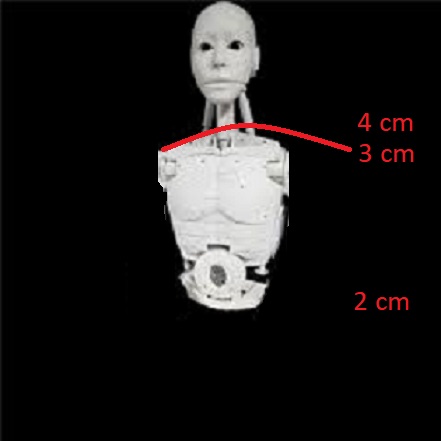
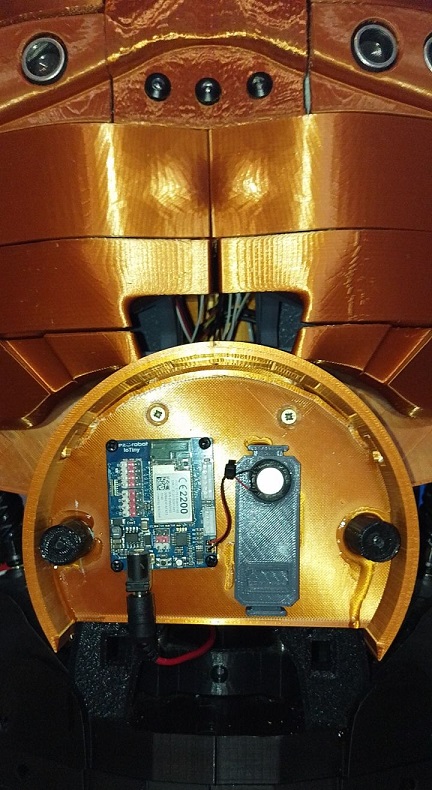
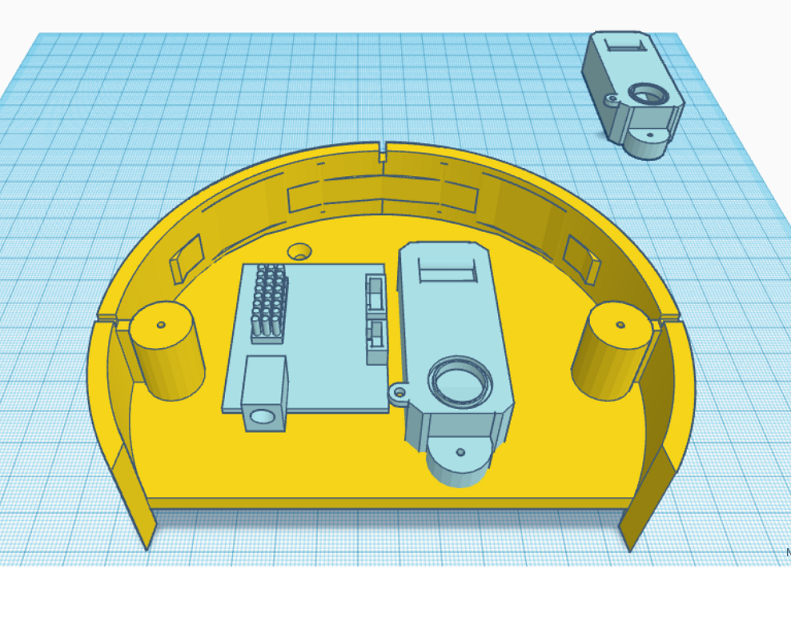
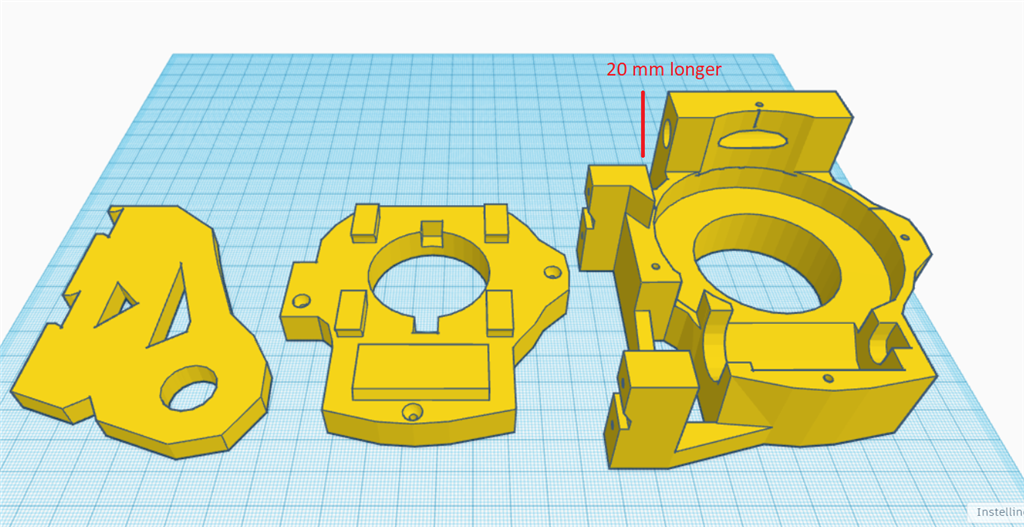
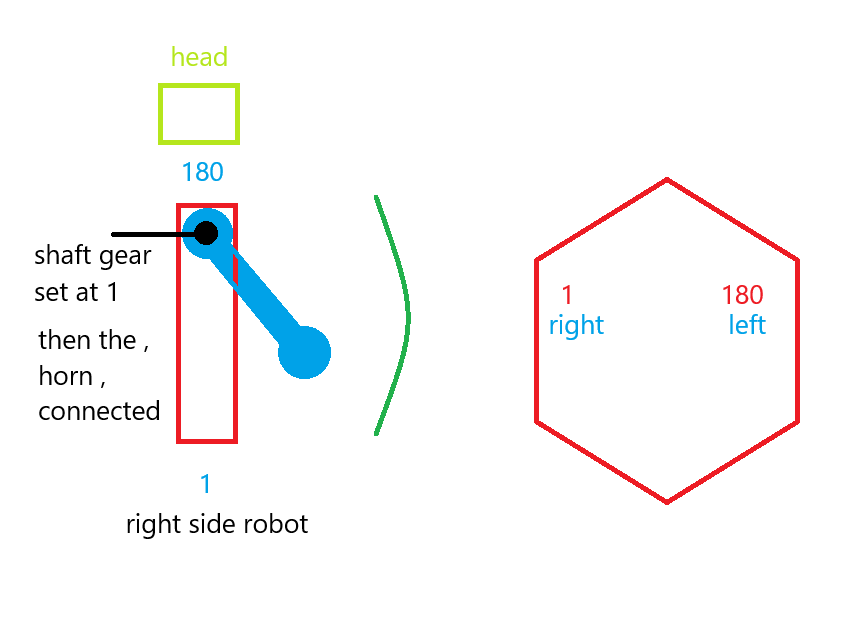
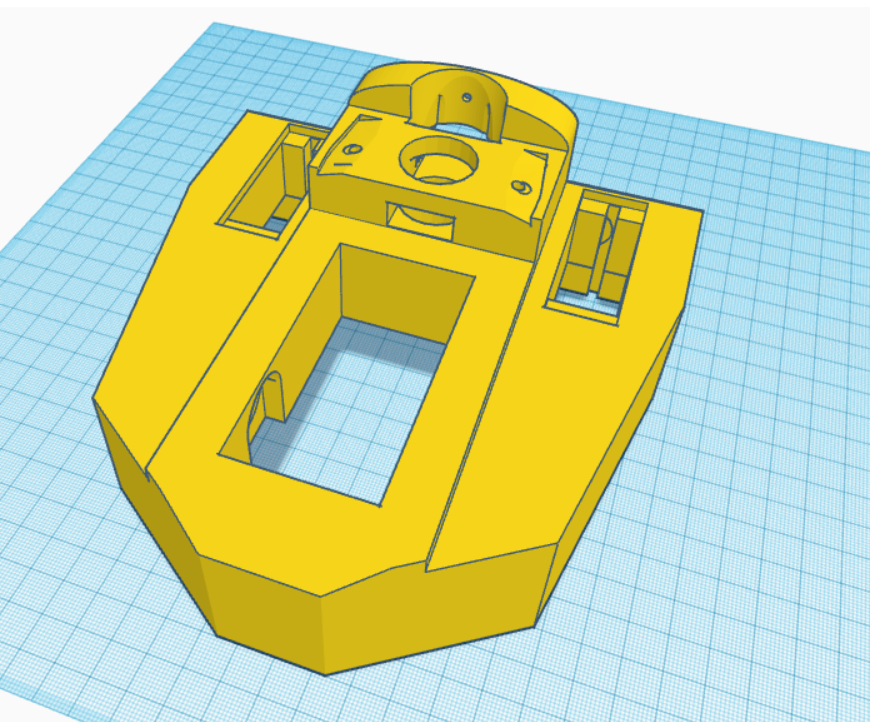
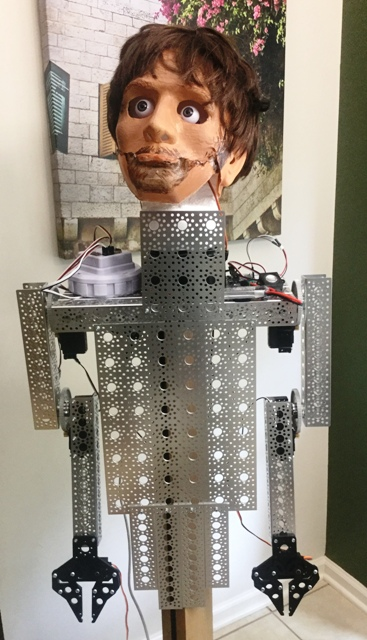
I've created a modified version of the EZ Robot head, featuring both side-to-side and up-and-down (yes) movements. This new design includes an improved base for the head, accommodating three additional HDD servos. There's an option to install two cameras, with the base designed to allow passage for a second camera cable. This setup is ideal for incorporating additional IoT devices or EZBV4, for instance, for LED lighting. Conveniently, there's no need to remove the potentiometer from a servo, as the 1 to 180-degree range provides ample movement. The base height is 7.2 cm.
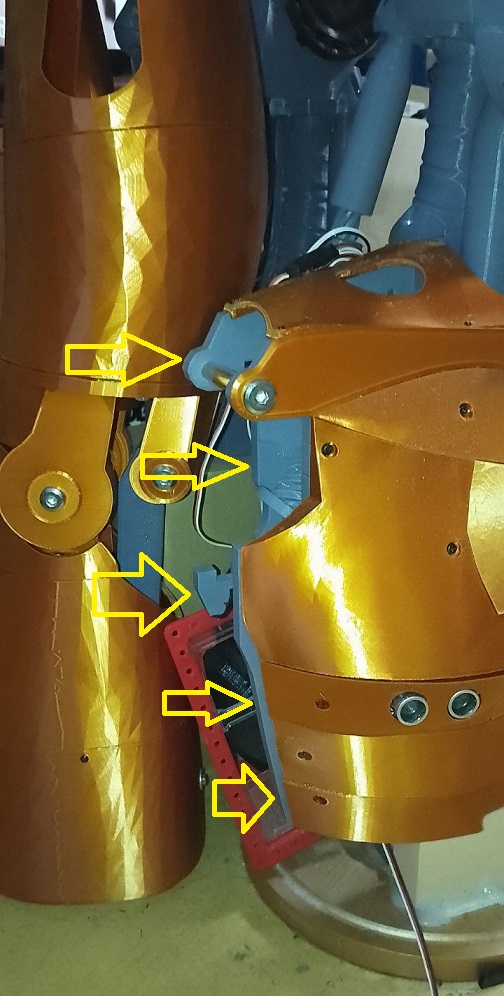
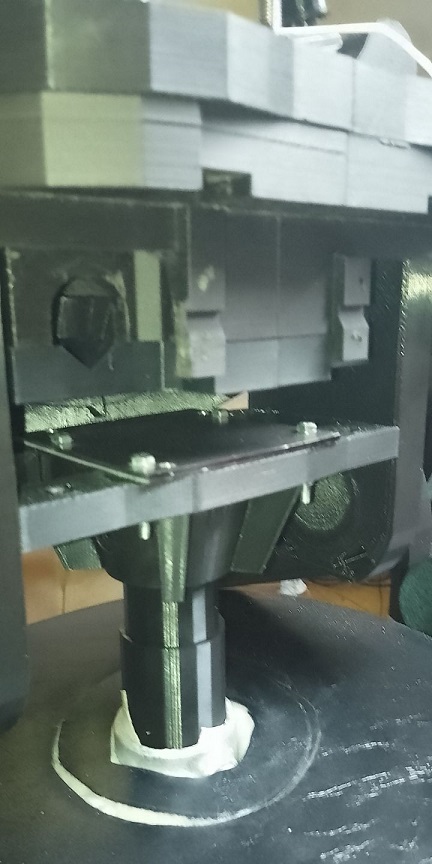
The pistons are original components from InMoov, and the neck base in EZ Robot is correctly designed.
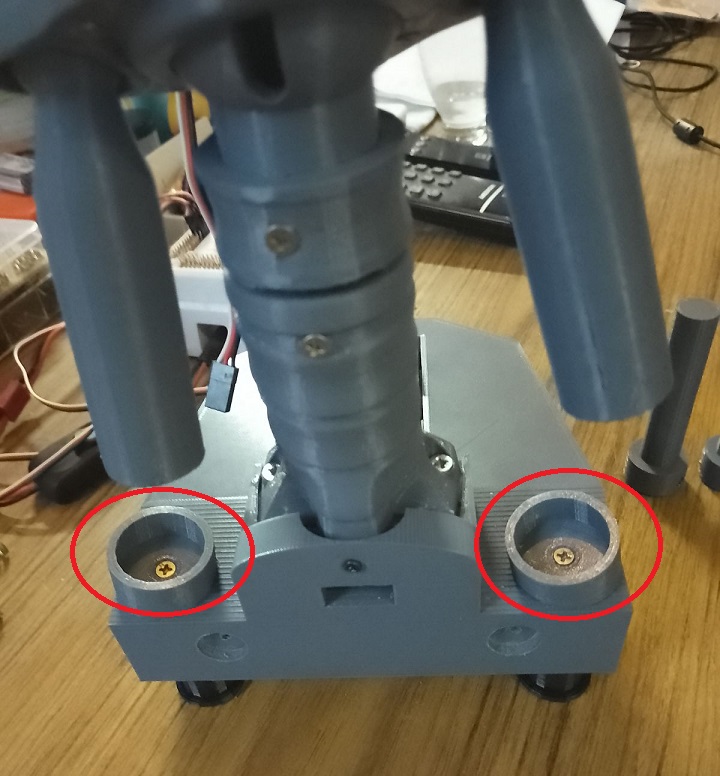
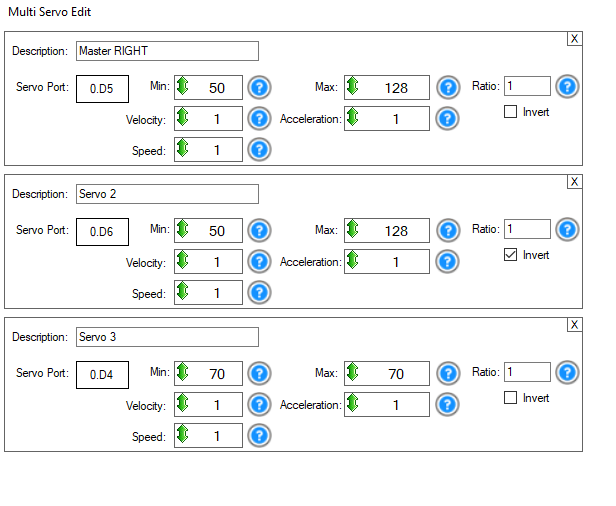
For moving the side pistons, adhere to these settings:
Programming
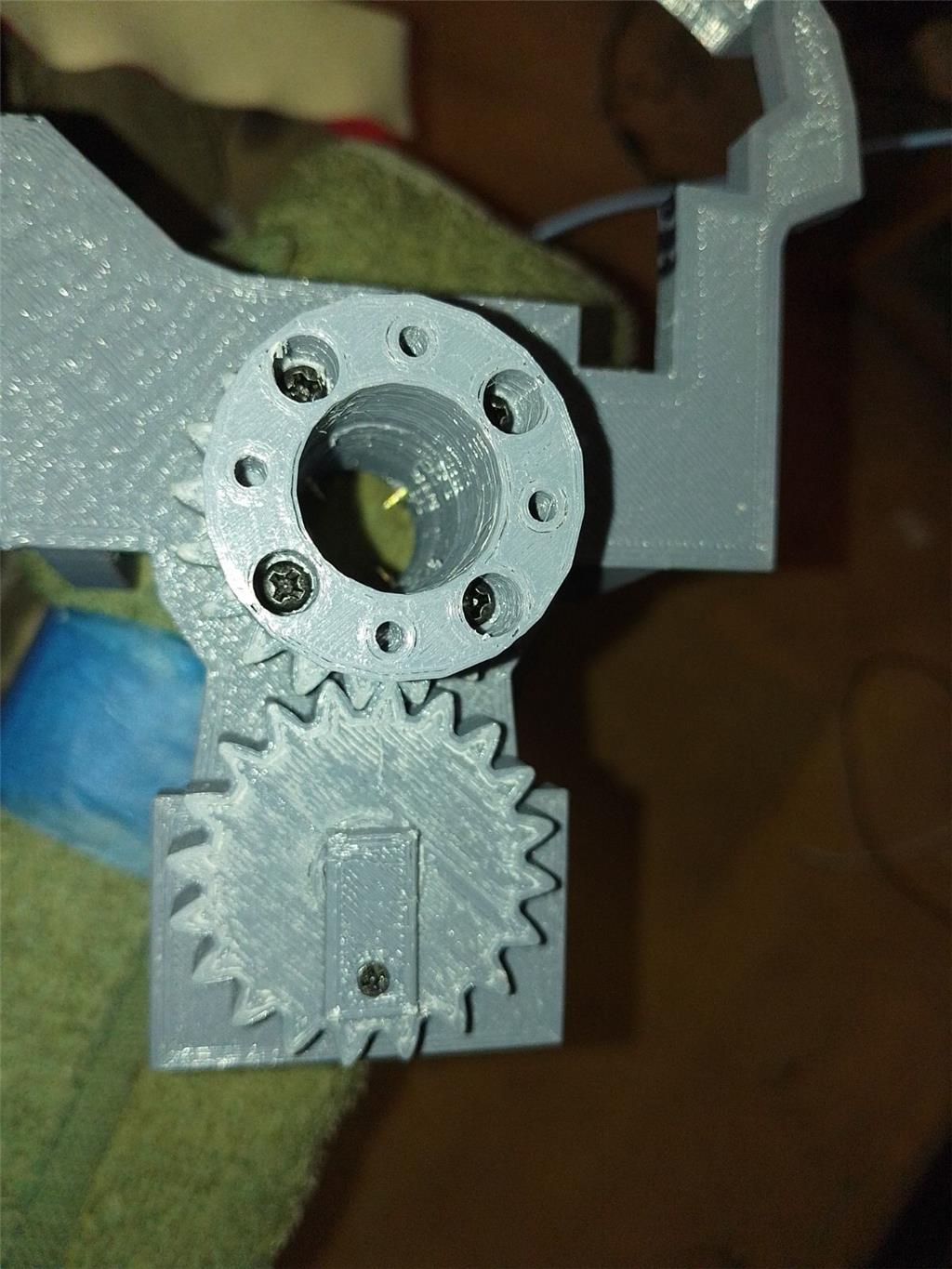
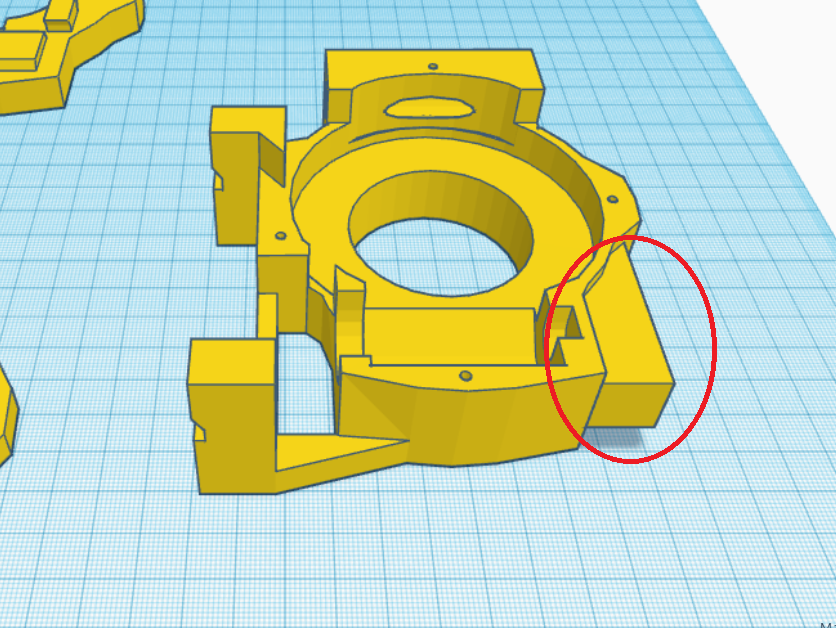
Adjusting the side pistons can be a bit complex. Start by calibrating your HDD servos. Then, align the inner piston with the holes in the piston base and secure it with a screw. For the second side piston, align it similarly, then disconnect the IoTiny. This allows you to manually adjust the previous piston to properly position the second one. The original documentation on EZ Robot is extremely helpful in this process.
Parts & Materials
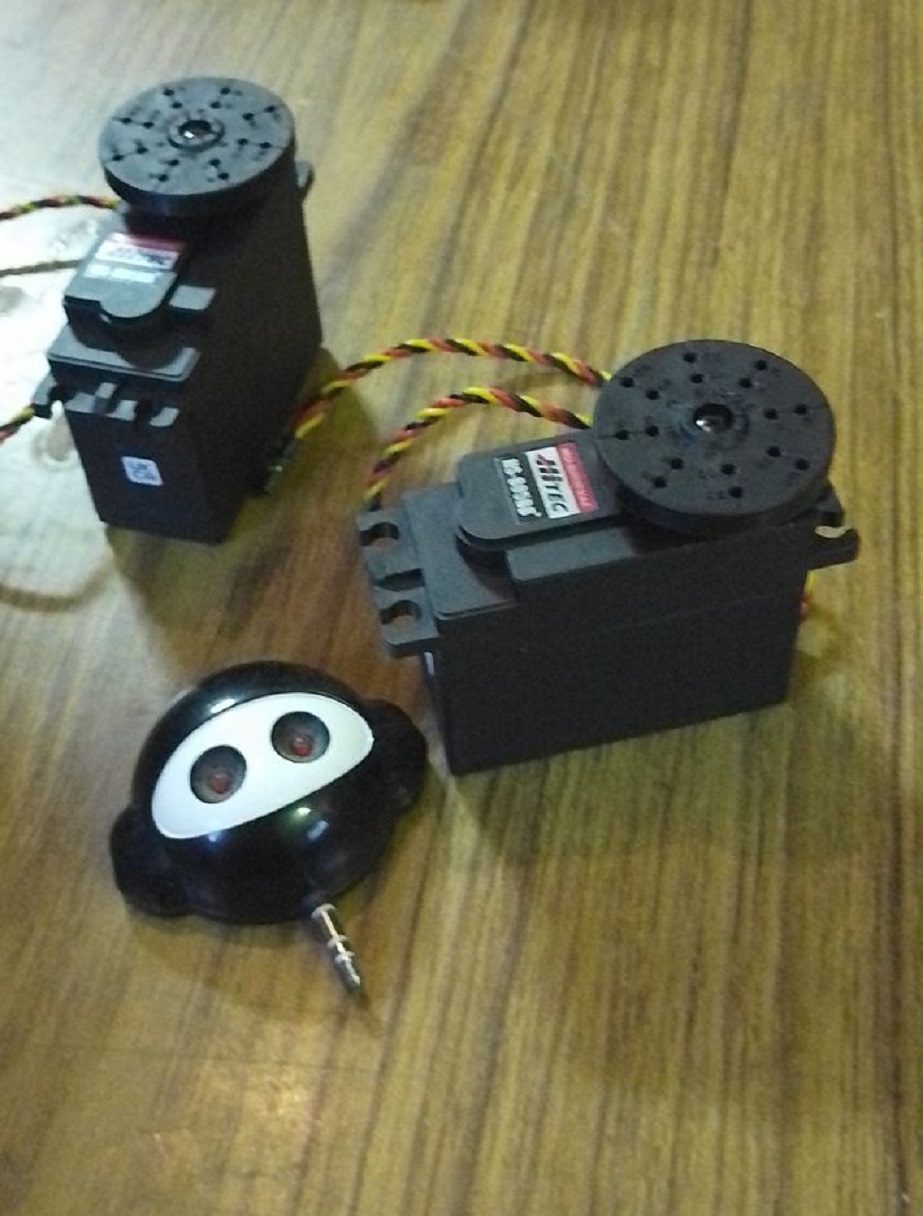
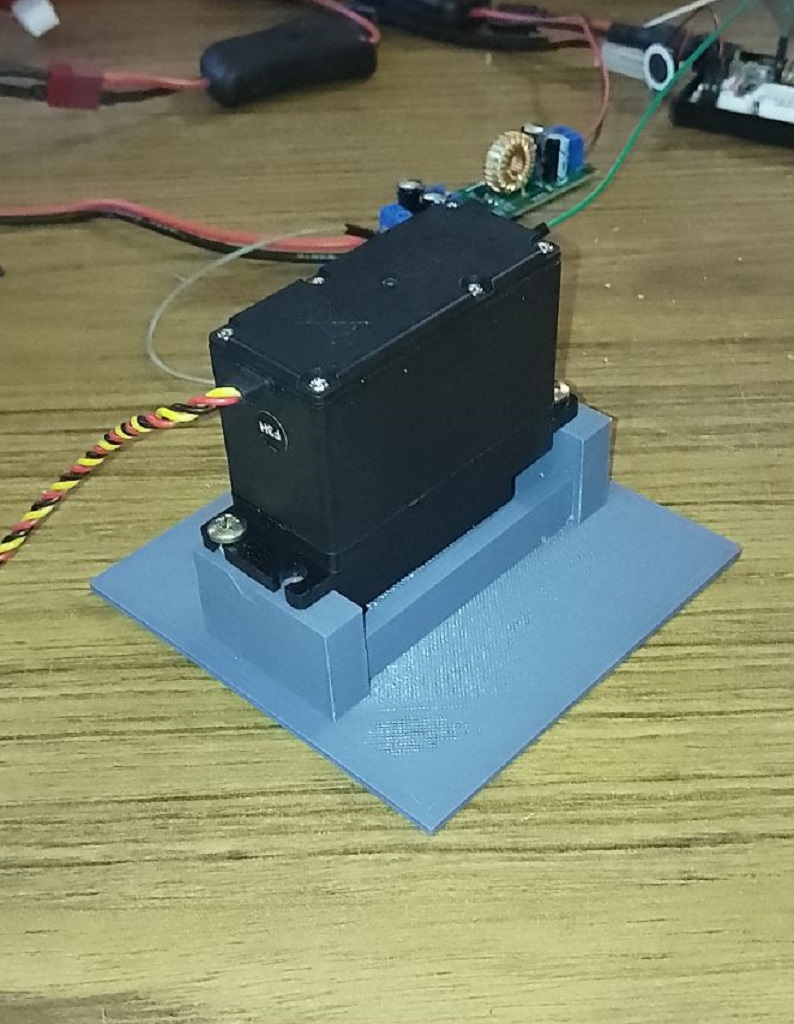
You'll need 3 extra HDD servos and grey PLA filament. The drive shaft parts should be printed with a 35% infill and a gyroid pattern in your slicer for enhanced strength. Other parts can be printed according to your preferences. Additionally, there's an optional neck extension, offering one to three extra vertebrae for more piston movement space. In my experience, the two-vertebrae option works best.
Discover more robots
Ezang's Roman The Robot

DJ's Wii Remote Controlled Robot

@dave
yes the inmoove wil be mounted on a metal pipe . in seat position . i mounted a metal plate so the pipe cant go further into the body .
That's really pretty cool. I'm looking forward to seeing the end result
@dave
the end result is still a long way . i will be happy if the waist wil work properly .
hi
some leg testing .
hi
the chair is adjustble in high . now the feet are on the ground .
I like the idea of the appearance of him sitting on a stool. Looks more natural.
@dave
was my idea also more natural look .
Agree also if he could ballance on stool maybe you could put servos in legs so he could move them. Cross legs etc.