

-636459989693042832.jpg)
-636459989943960739.jpg)
-636459990485479714.jpg)
-636459980560649389.jpg)
-636459975718038038.jpg)
-636459969210457653.jpg)

-636459967995726605.jpg)
-636459970865108143.jpg)





















































-636465120384538626.jpg)
-636465113490053830.jpg)














-636475595612490698.jpg)





















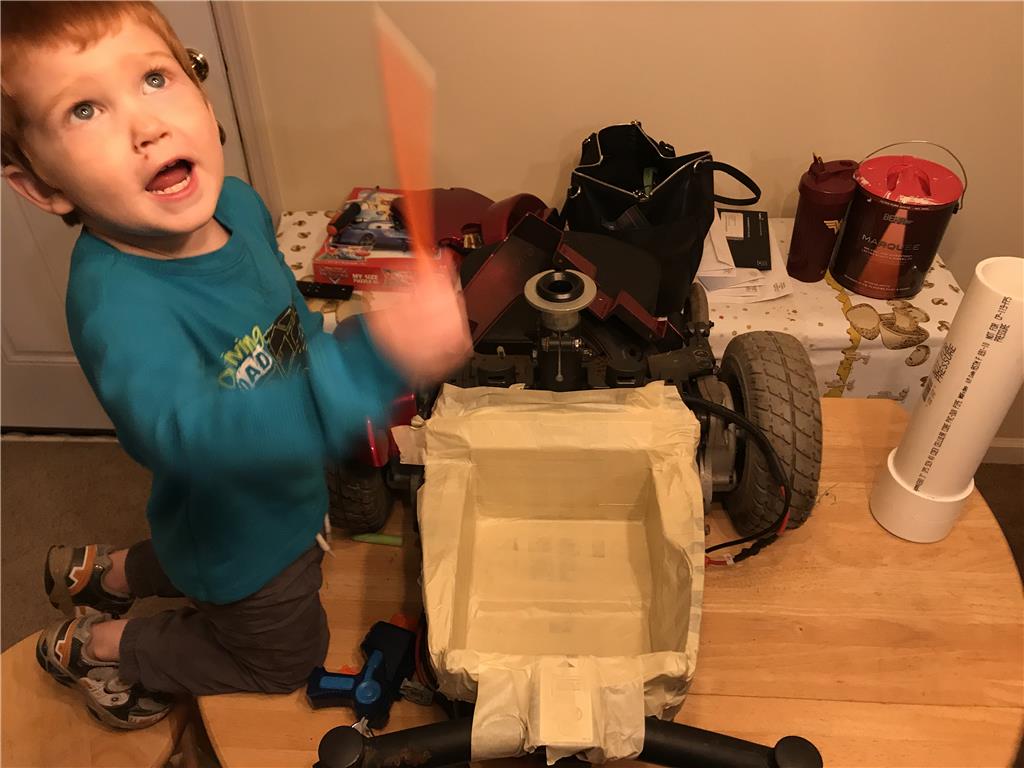
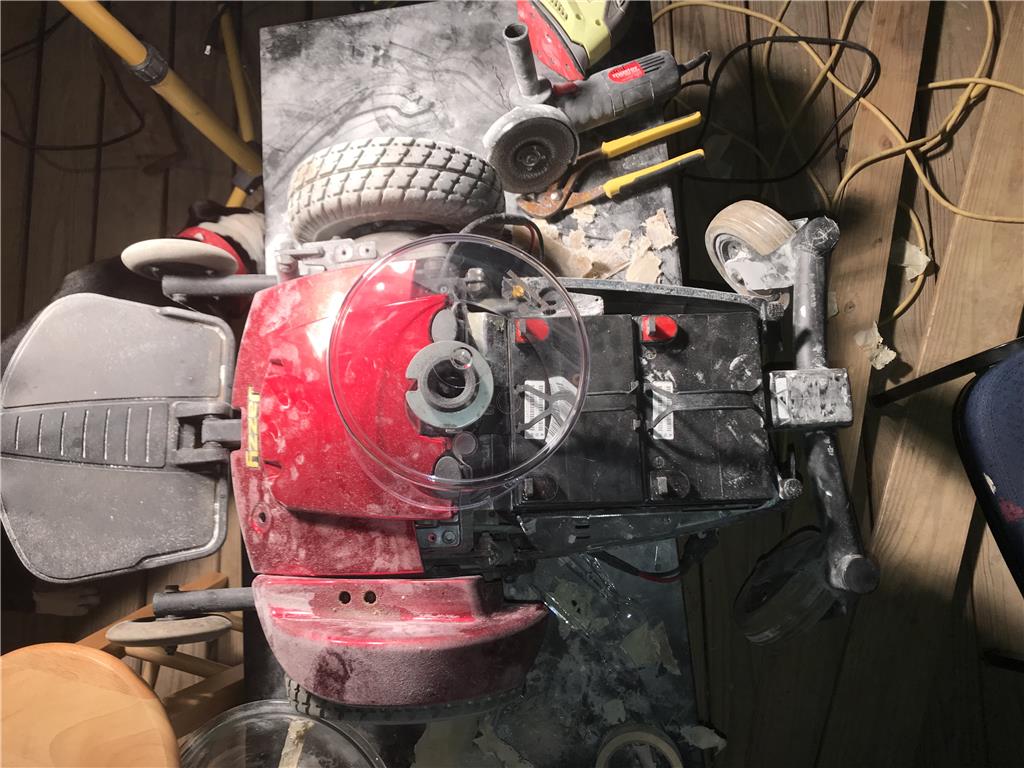
Here is the current look of this project, Super cool update, magpi magazine wants to feature this build with steps how it was done , !

By jstarne1
— Last update
Discover more robots

Khanflicks's Super Mario Humanoid Project
Convert a Mario toy into a humanoid with servos and JD legs; troubleshooting loose servo fittings and phone connectivity...

Robot's Irobot Create With An Arm
Control iRobot Create with V3 EZ-B and a 6-servo arm to help a Roomba clear obstacles in its cleaning path

Gabbott's Quadruped Called Thumper
Quadruped robot nearing completion: installing servos for head motion and refining gait to improve walking performance.

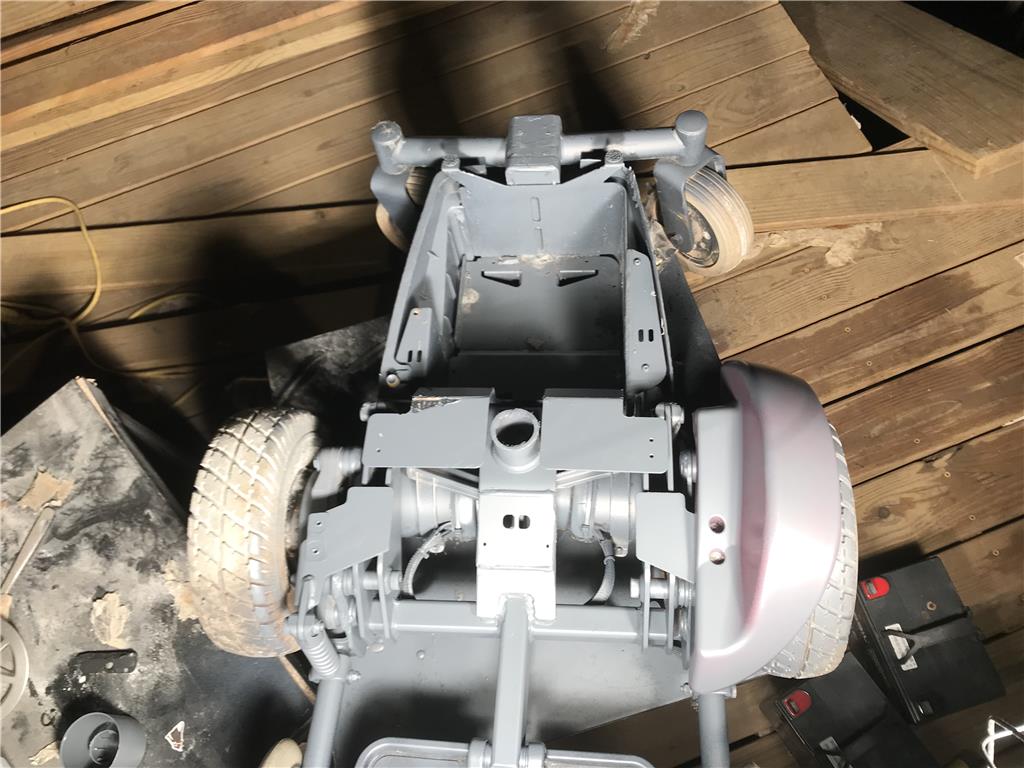
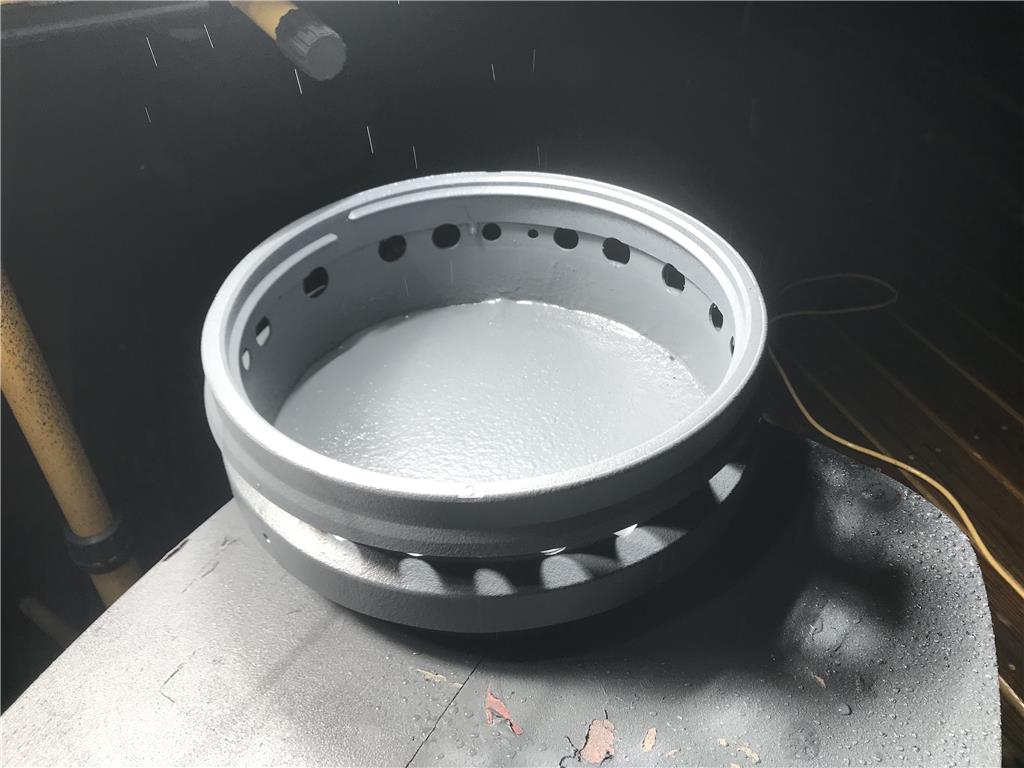
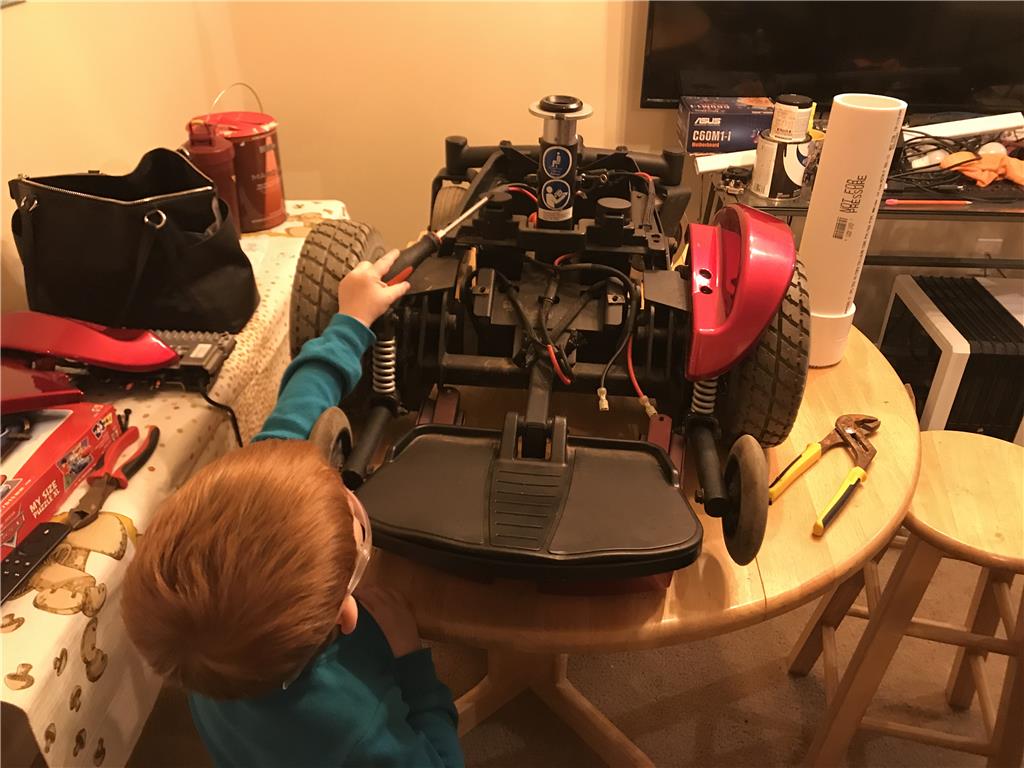
Preview of rear wheels
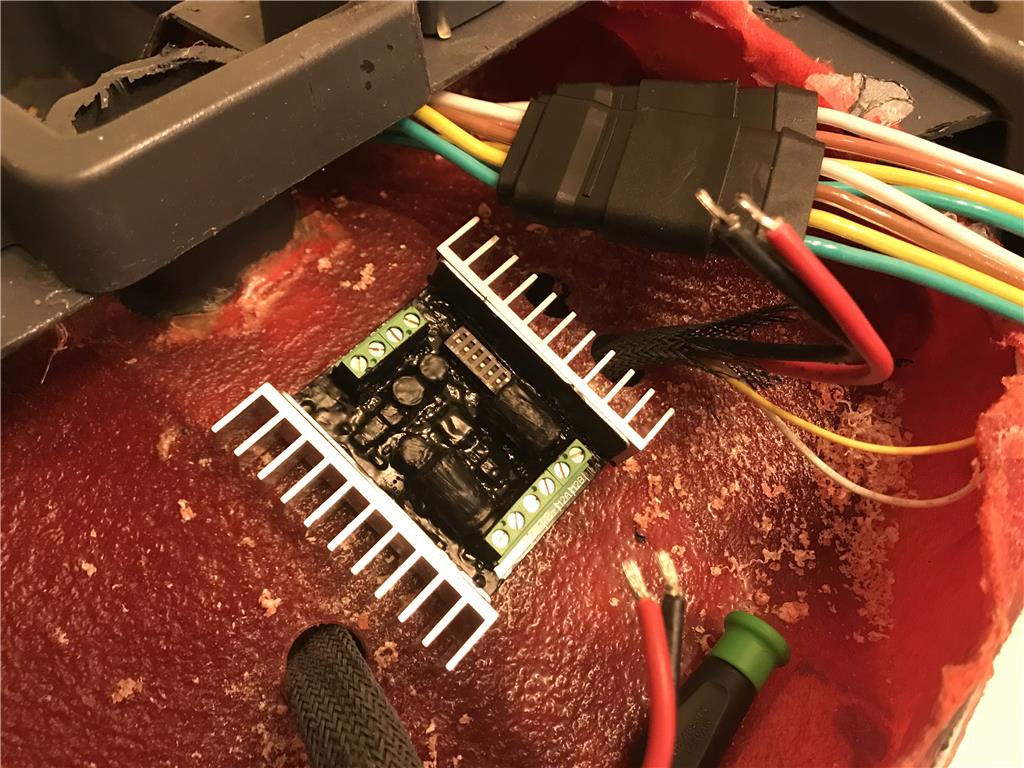
My baby started taking its first steps today. I was using 9600 baud and 12 volts to the sabertooth. I kept having wierd things happen when I sent commands , but if I slowed down the speed slider to the bottom quarter then forward and turning started working fine. Another wierd development was that I could adjust the speed slider so that it moved forward straight , but then when reversing it would turn as the motors where not moving the same speeds. Thinking that maybe I was having a low torque issue I rewired the batteries in series to 24 volts and tried agian. It was better, but still happening. Will I have to make a custom Movement Panel to correct this?
Any ideas for correction are great.
There might be interference on the uart to the sabertooth. You shouldn't need a custom Movement Panel - because the sabertooth Movement Panel is popular for being reliable. Try a different baud rate and make sure the uart cable isn't running along side any power that could interfere
If the reverse isn't moving the same speed, that is most likely power/motor/gearing related. The sabertooth receives the command and does its thing. Long as it is receiving the command correctly, it'll output the same voltage on both channels via pwm.
Slow speed movement is very much going to cause challenges due to the motors having different efficiency ratings. Slow speed is going to expose any of the differences across the two motors.
Ok what baud rate do you suggest?
I don't suggest any specific rates - i suggest trying different ones
Also, If the reverse isn't moving the same speed, that is most likely power/motor/gearing related. The sabertooth receives the command and does its thing. Long as it is receiving the command correctly, it'll output the same voltage on both channels via pwm.
Slow speed movement is very much going to cause challenges due to the motors having different efficiency ratings. Slow speed is going to expose any of the differences across the two motors.
Ah ok , I will play with it tommorow. I don’t think it is the motors because if I give them straight 24 volts everything is gravy, they have matched speeds.
Edit : I see what you mean about the slower the Robot moves the more differences pop out.
I could put a meter to the sabertooth while in reverse and see if the pwm voltage is reading the same on both sides too , thanks for the feedback.