

-636459989693042832.jpg)
-636459989943960739.jpg)
-636459990485479714.jpg)
-636459980560649389.jpg)
-636459975718038038.jpg)
-636459969210457653.jpg)

-636459967995726605.jpg)
-636459970865108143.jpg)





















































-636465120384538626.jpg)
-636465113490053830.jpg)














-636475595612490698.jpg)





















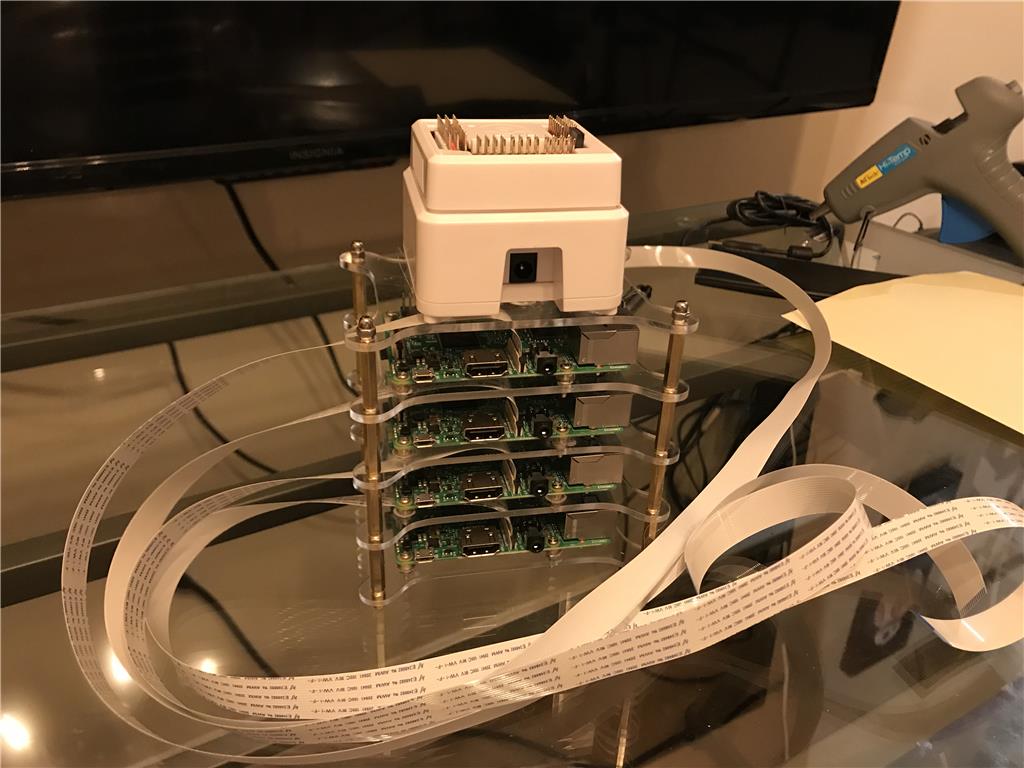
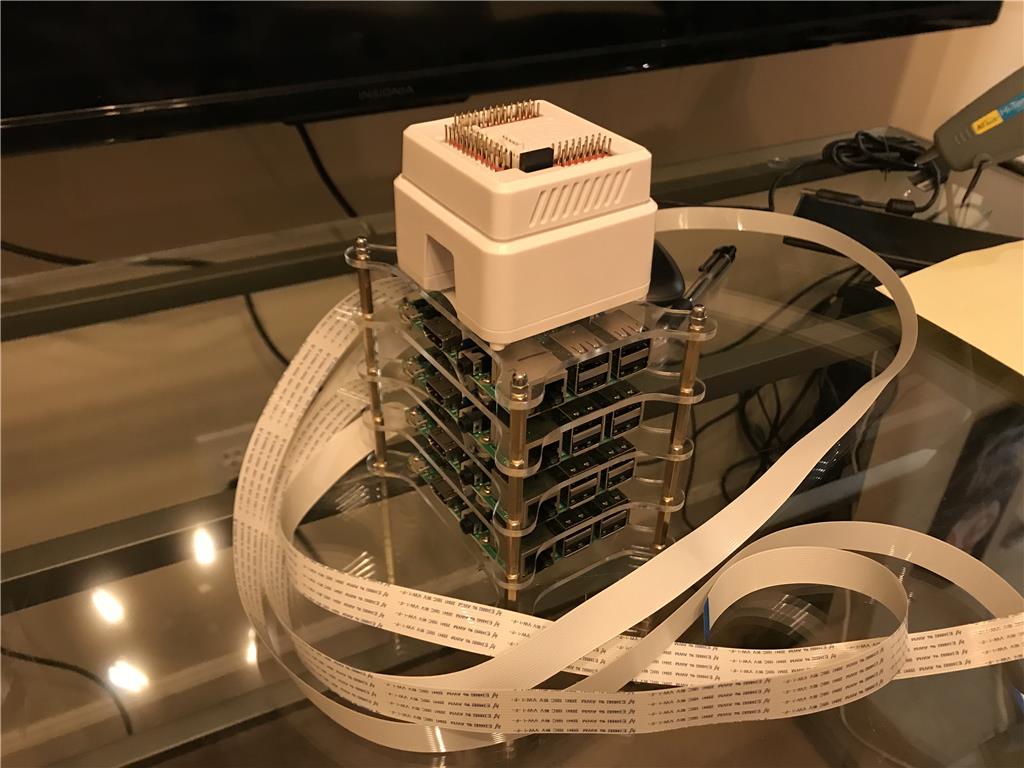
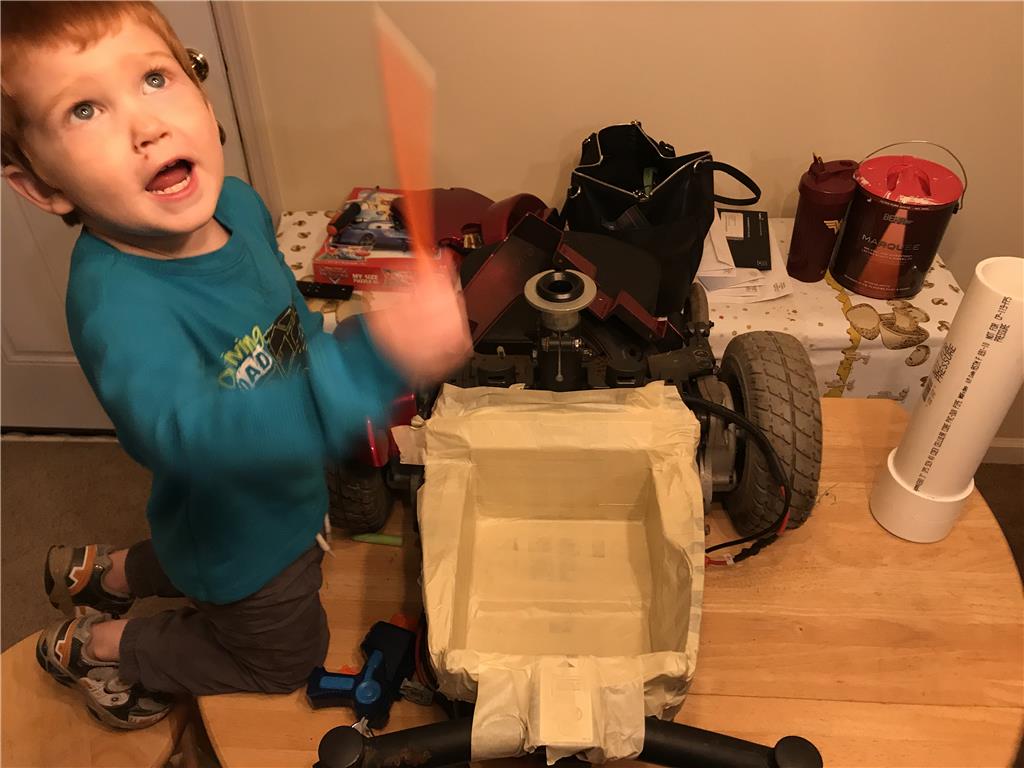
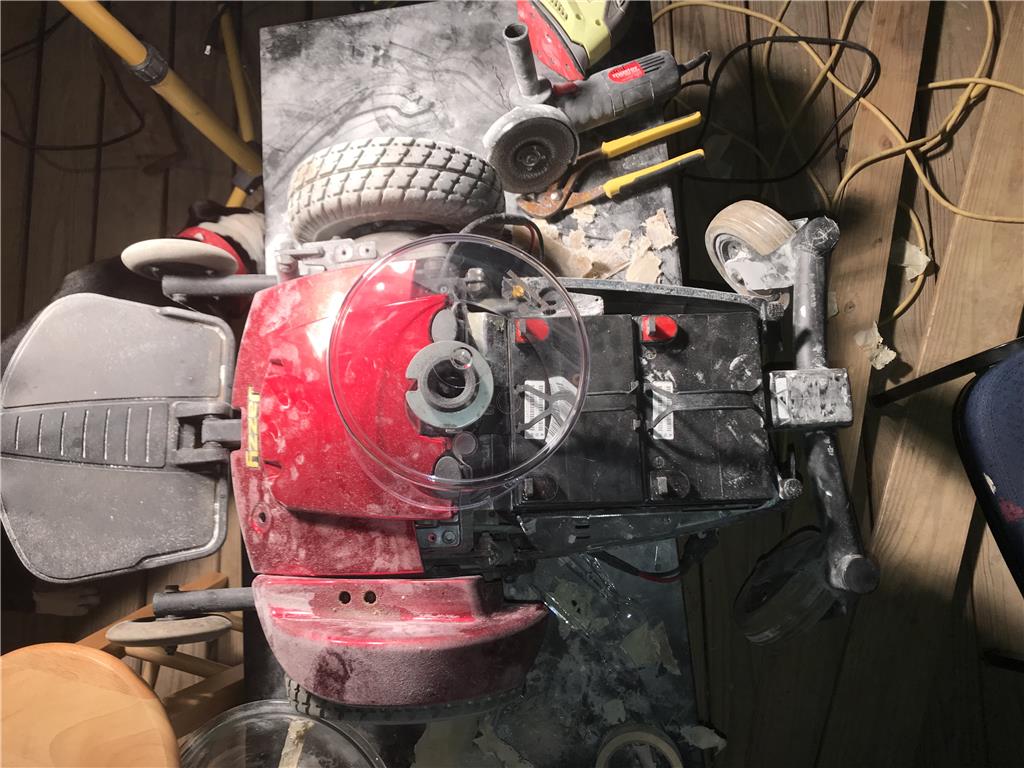
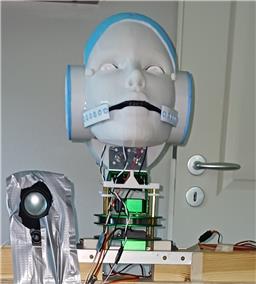
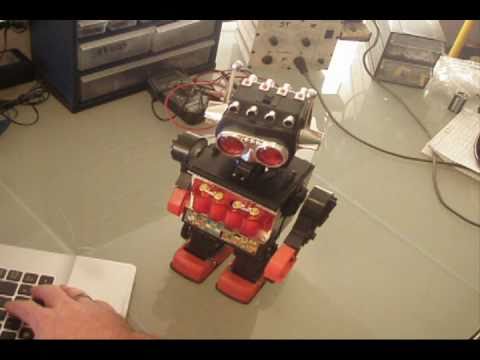
Here is the current look of this project, Super cool update, magpi magazine wants to feature this build with steps how it was done , !

By jstarne1
— Last update
Discover more robots
Jp15sil24's Samantha
Synthiam ARC powers Samantha, a humanoid robot with Python voice control, servo movement, sensors, face tracking, and...
Redzone's 2Nd Inmoov Build
Second InMoov build assembling right forearm and fingers, choosing fingertip sensors or a hand proximity sensor to...
DJ's Master Blaster Robot
Remote-controlled 1980s-style animatronic robot with servos for arms/head and wheeled mobility, controlled via Synthiam...

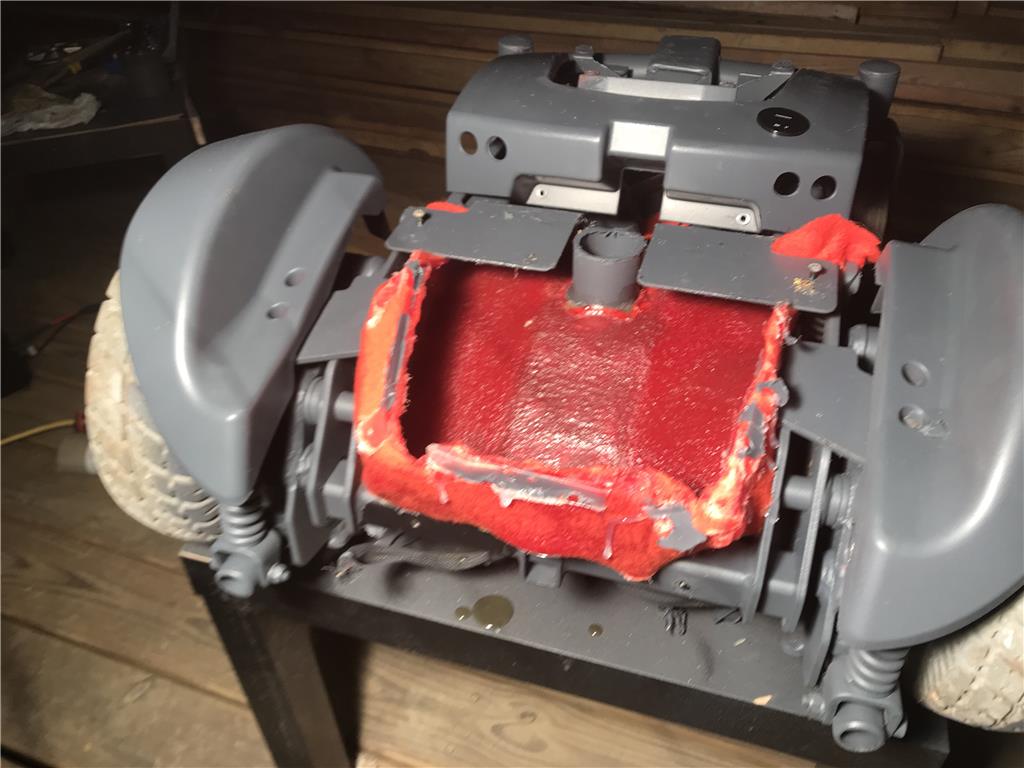
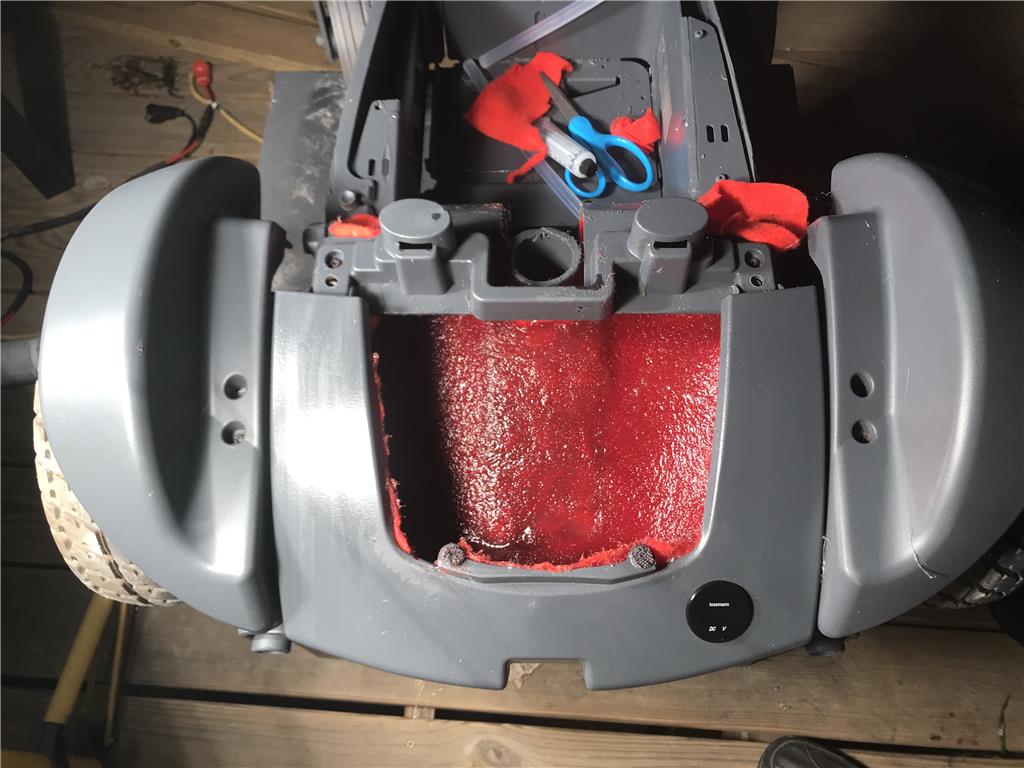
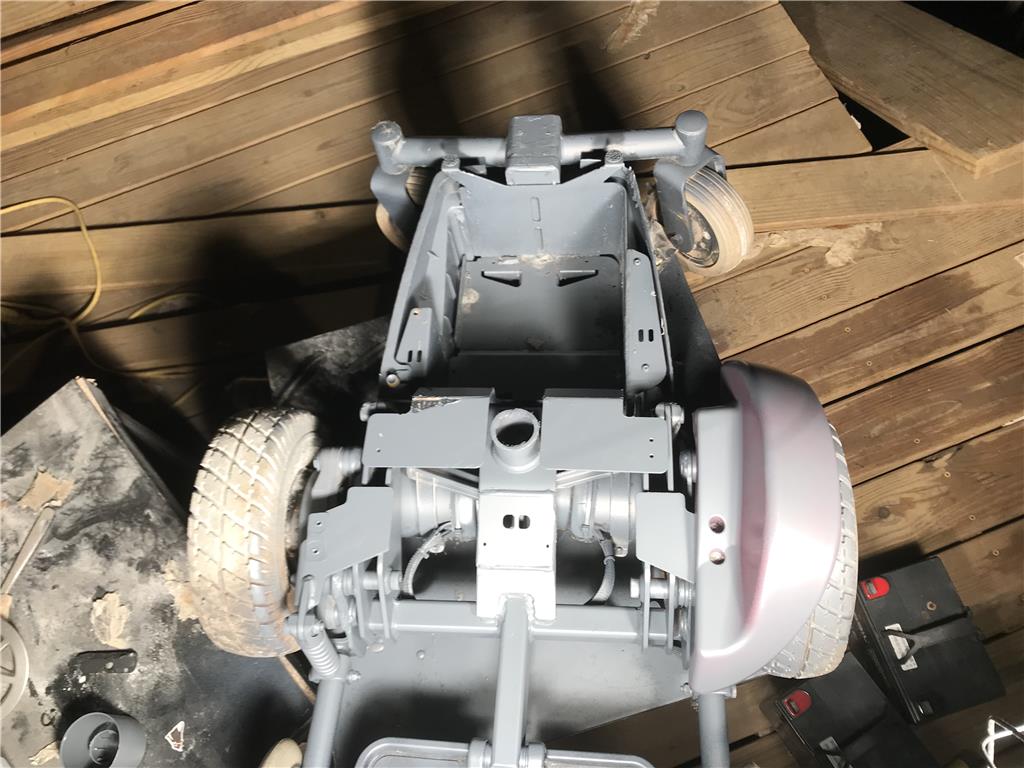
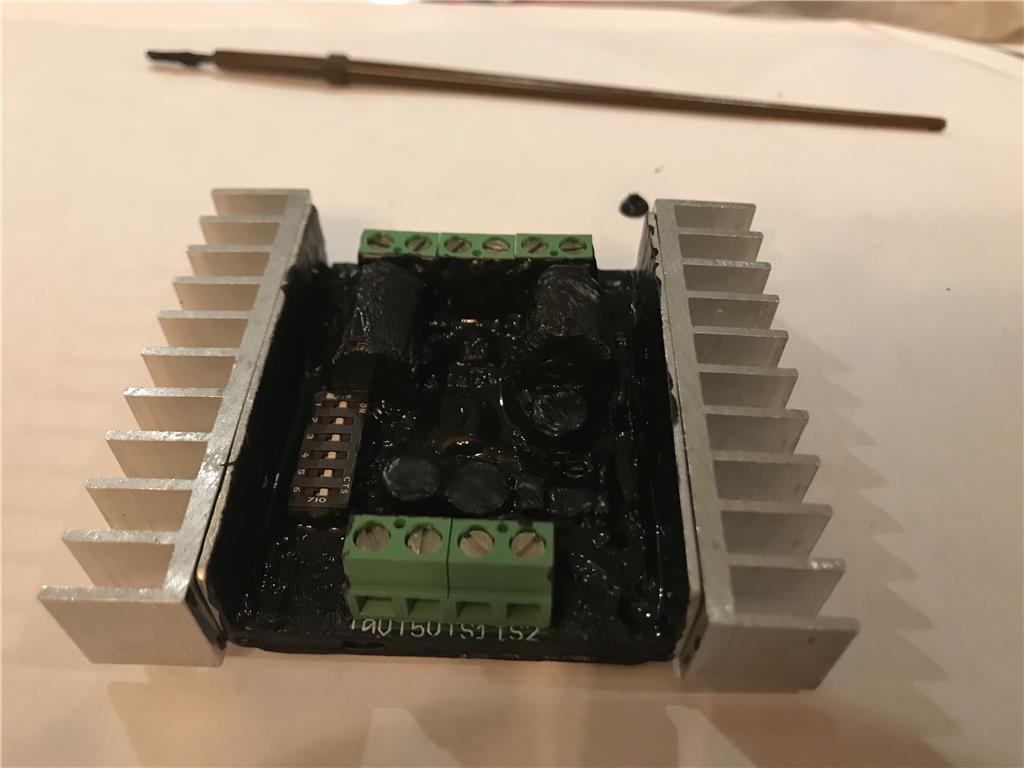
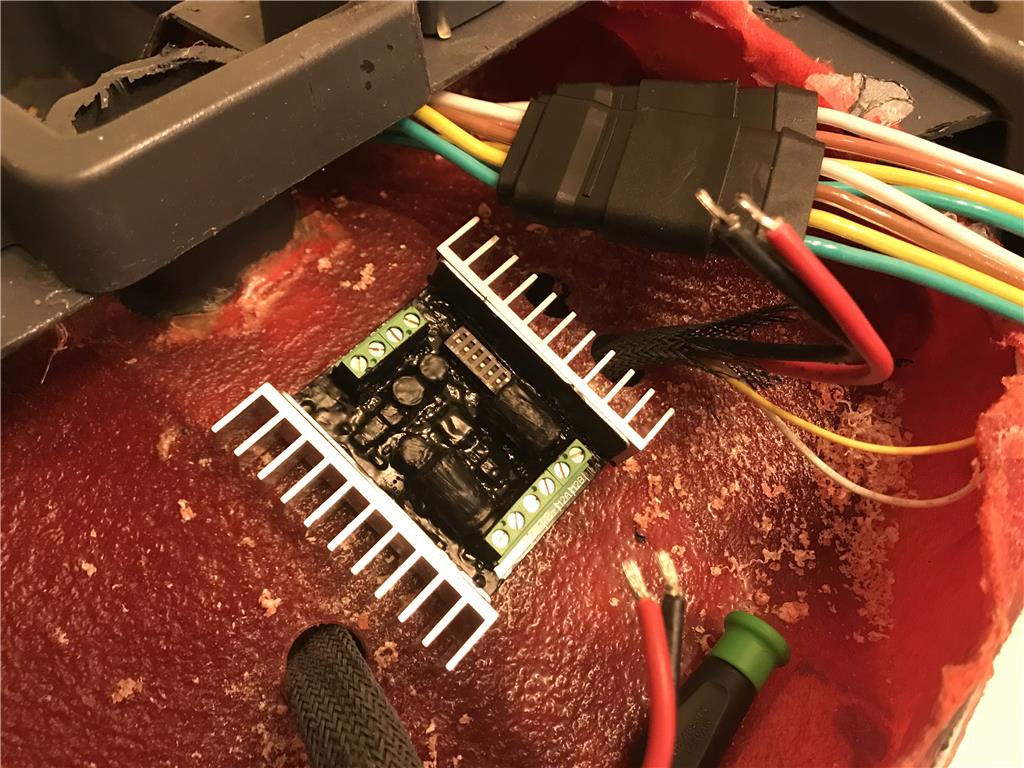
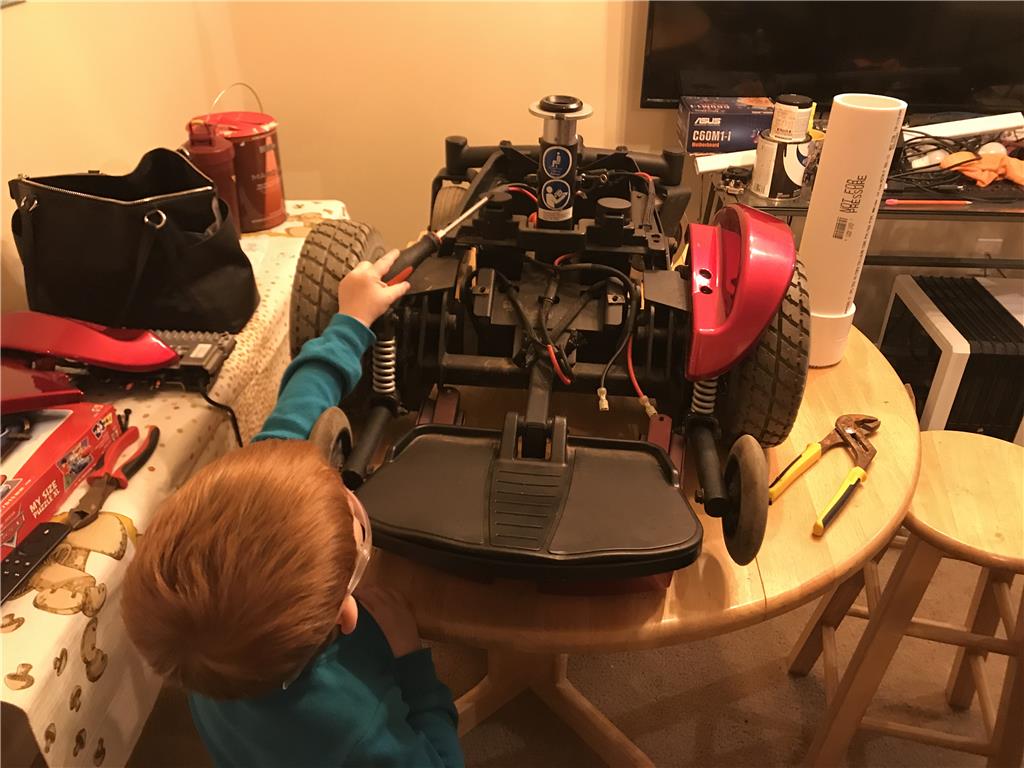
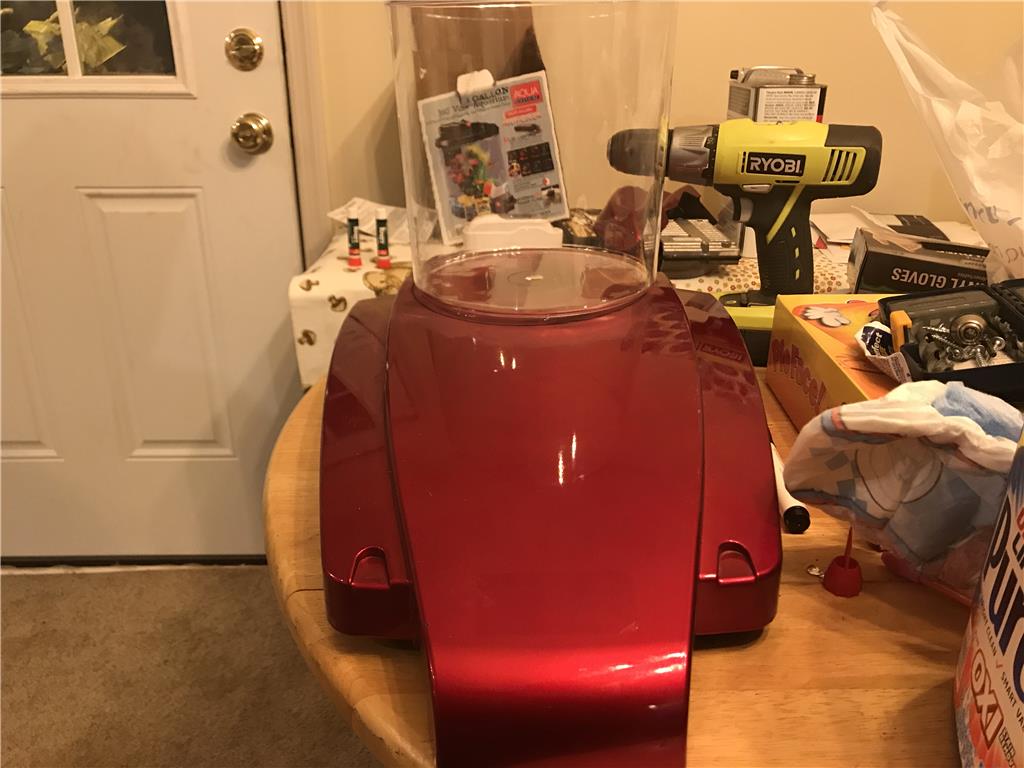
I have picked up a few Jazzy power chairs and pulled the seats off of them. I will further remove stuff that I don't need. I have seen people hack the original motor controllers but I feel like I am better just selling the original on Ebay and buying one made for DIY building instead. My first power chair base project I used a Sabertooth 2x12 ,but I do have a couple other generic controllers I picked up that may work just fine. I will post some pictures, thoughts, goals and parts I have to work with so far. Any input is cool.
You have two threads with a similar subject (wheel chairs). Which one you will keep updating ?
I dont see the second one , Are you talking about the power chair thread? Because thats not for specifically my projects but general ideas for power chair robots. Thats a free for all discussion.
This is a Project showcase for the Outdoor Security robot build.
I missed the "Project showcase" tag.
General Goals
a mobile platform that can patrol a set routine
Motion tracking , robot turns towards movement and tracks that object/ person
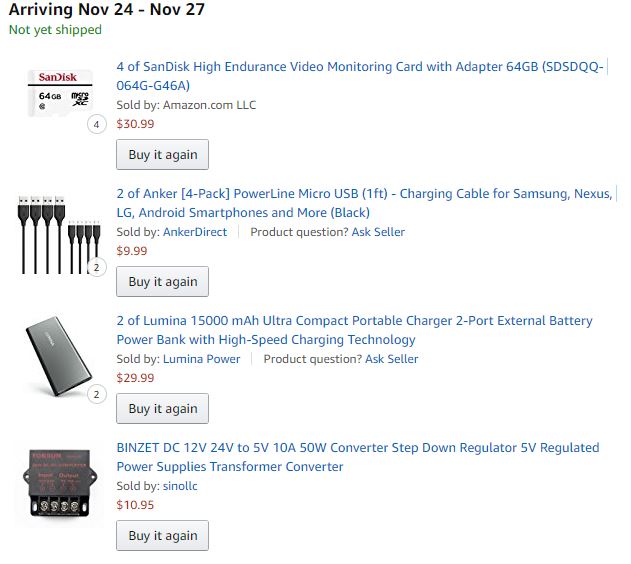
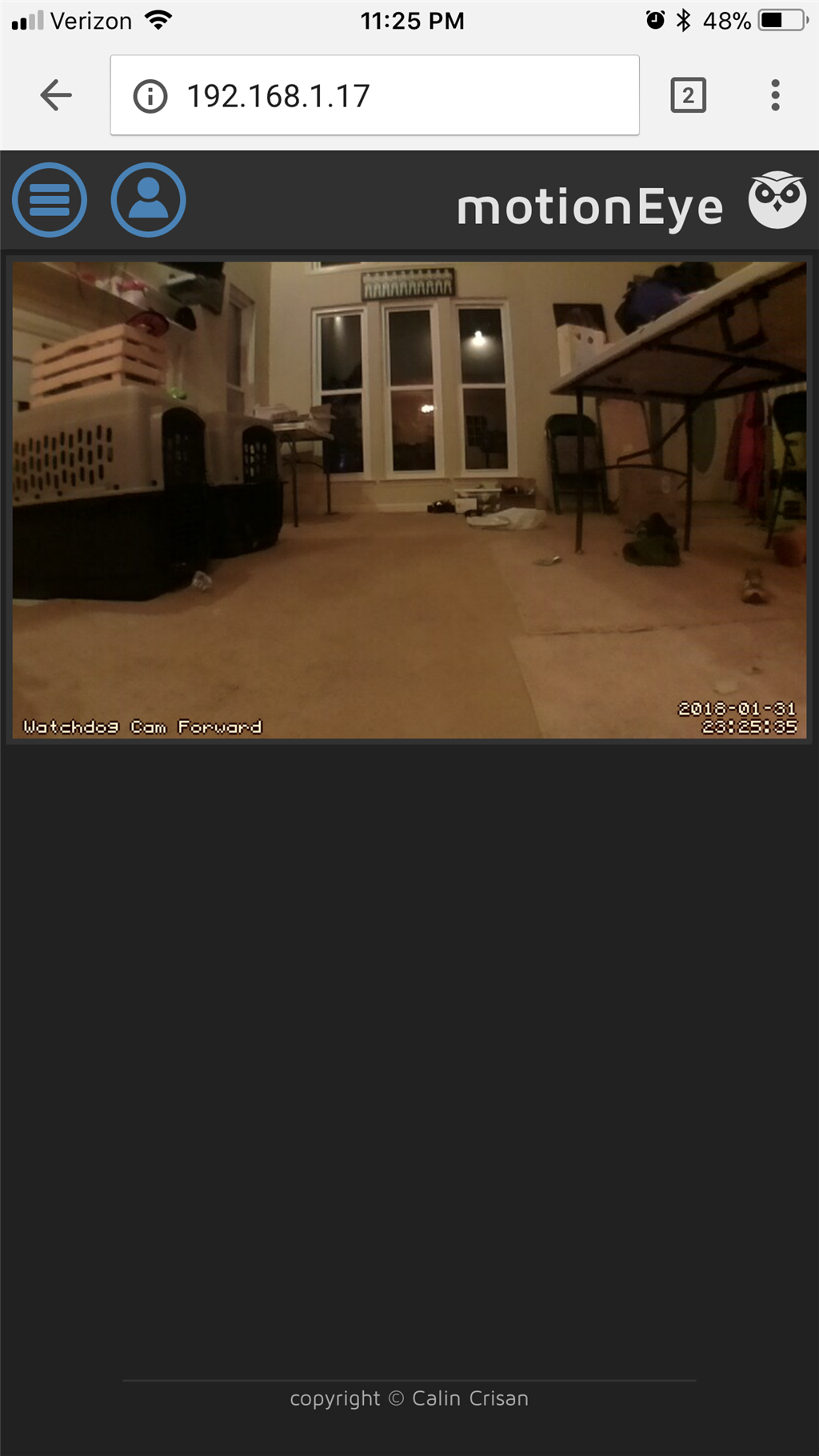
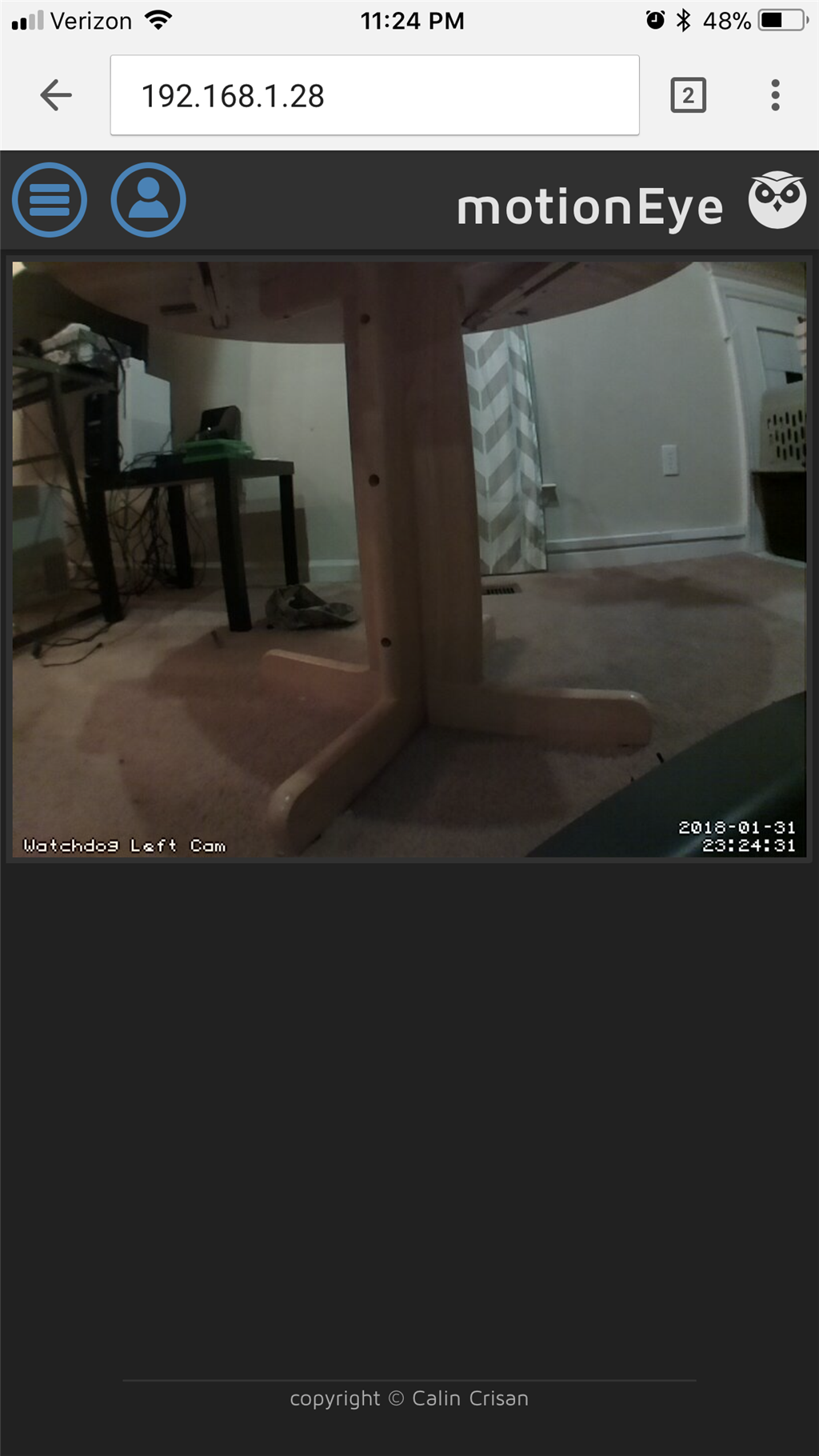
3-4 cameras recording 24 / 7
run without outside power for at least 12 hours, but the goal is excess of 24 hours.
-Even in the even the robotic size of the electronics fails or the battery runs dead, there is a backup that keeps the cameras on and recording.
-Recording both locally on the robot itself and also wireless video sent to a recorder that I will probably setup with another raspberry pi.
Live access to the cameras over the internet
1 tb hard drive dedicated to every camera, covers recording in HD for at least a rolling month. Recordings in 10 min intervals.
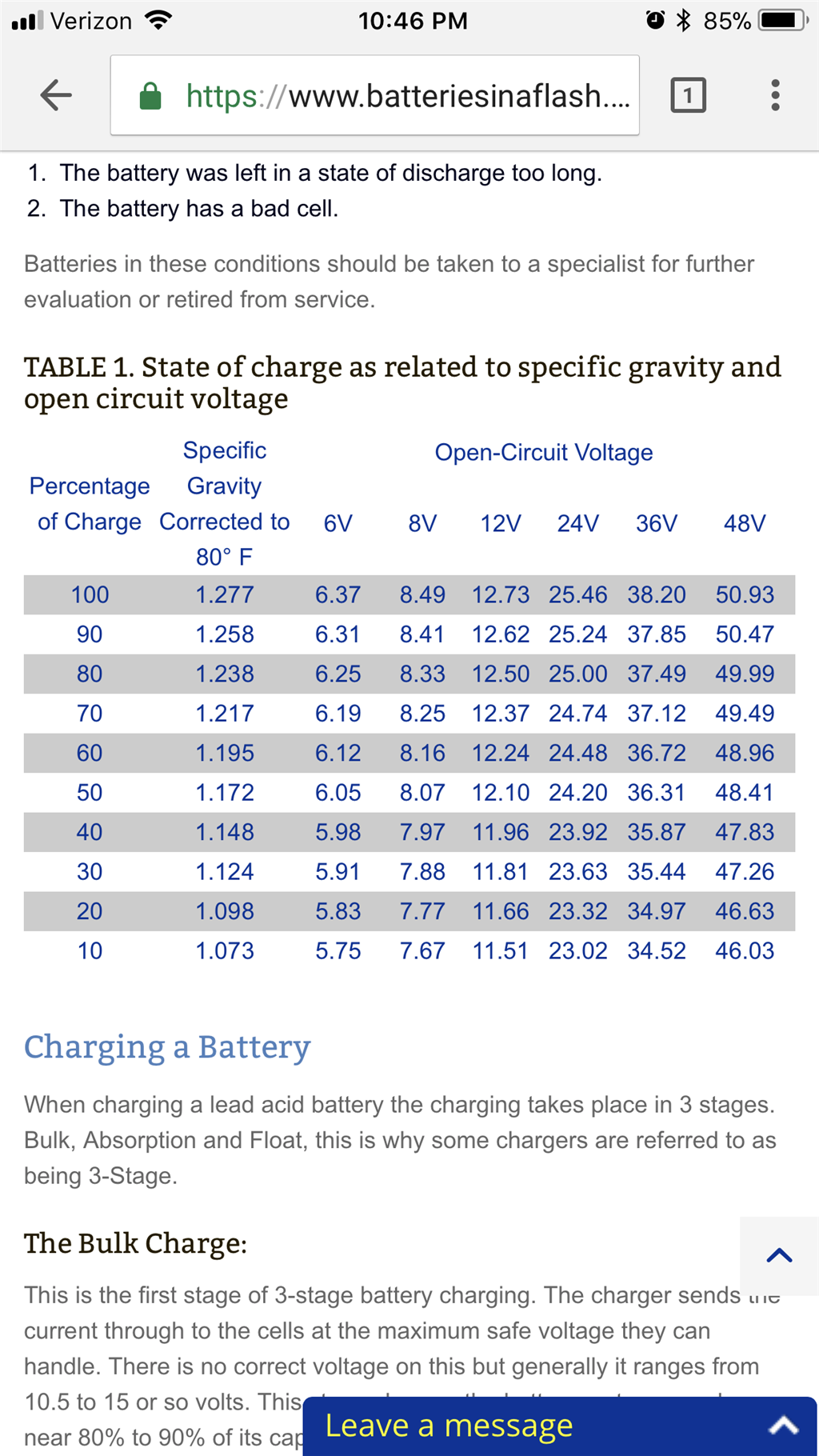
-Dual battery setup, one battery for the drive wheels , motor controller and ezb Lithium battery 10,000 mah packs for each camera
-Safety Stop switch that cuts power to motor controller in the event of an emergency, but everything else still records.
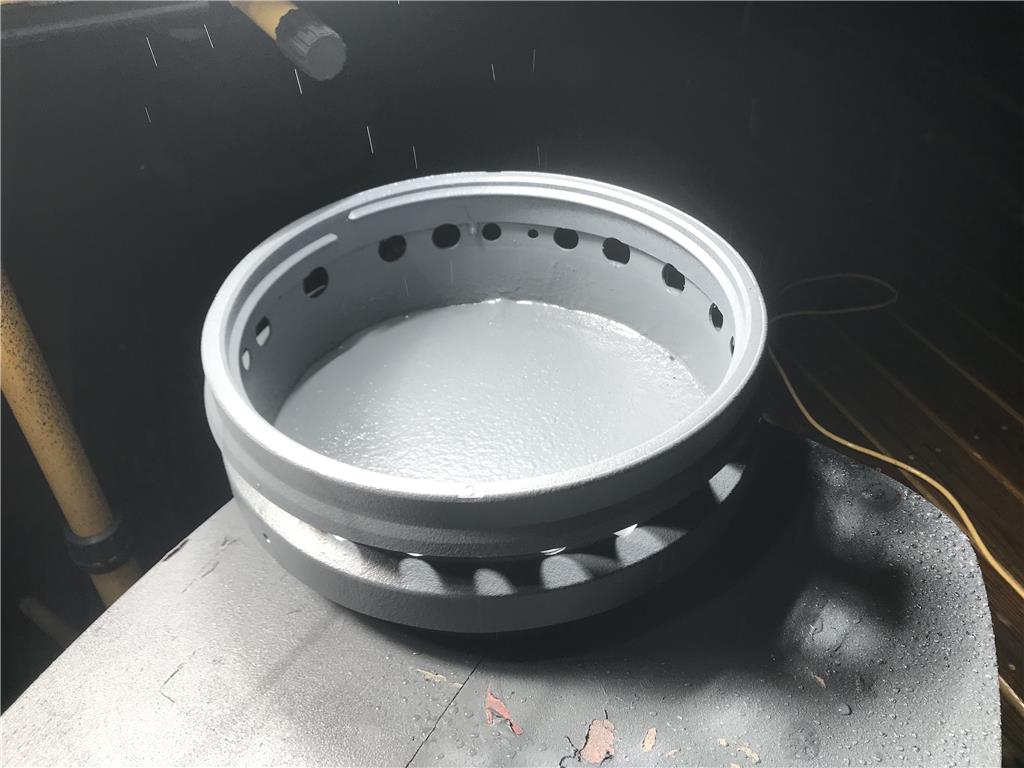
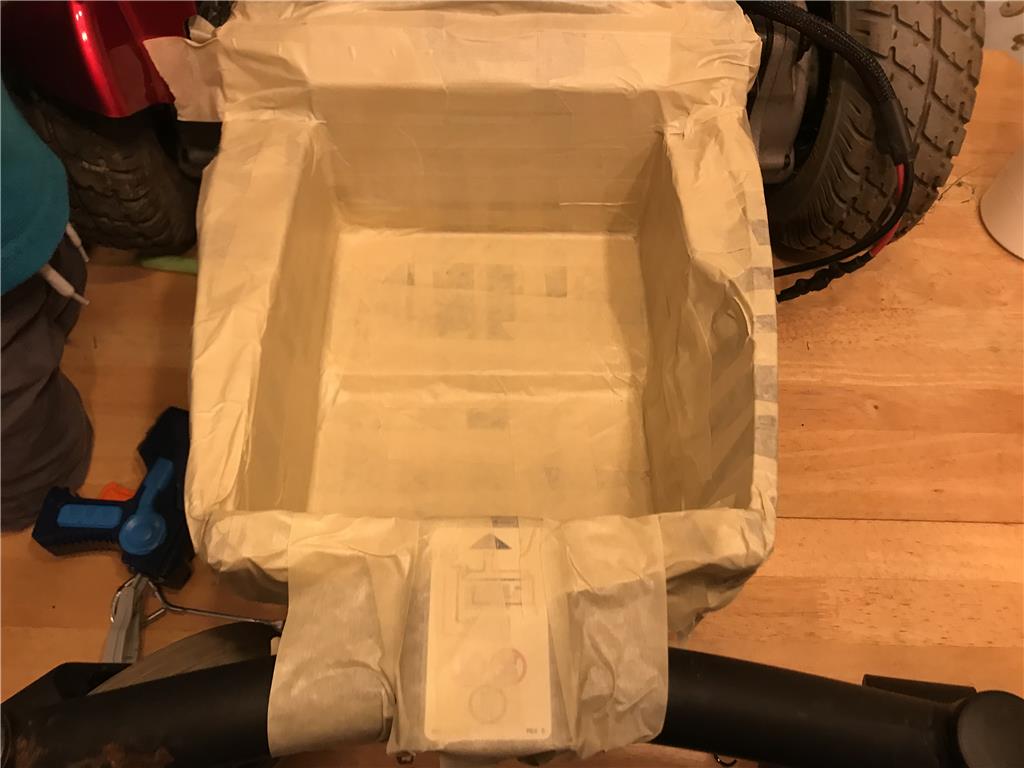
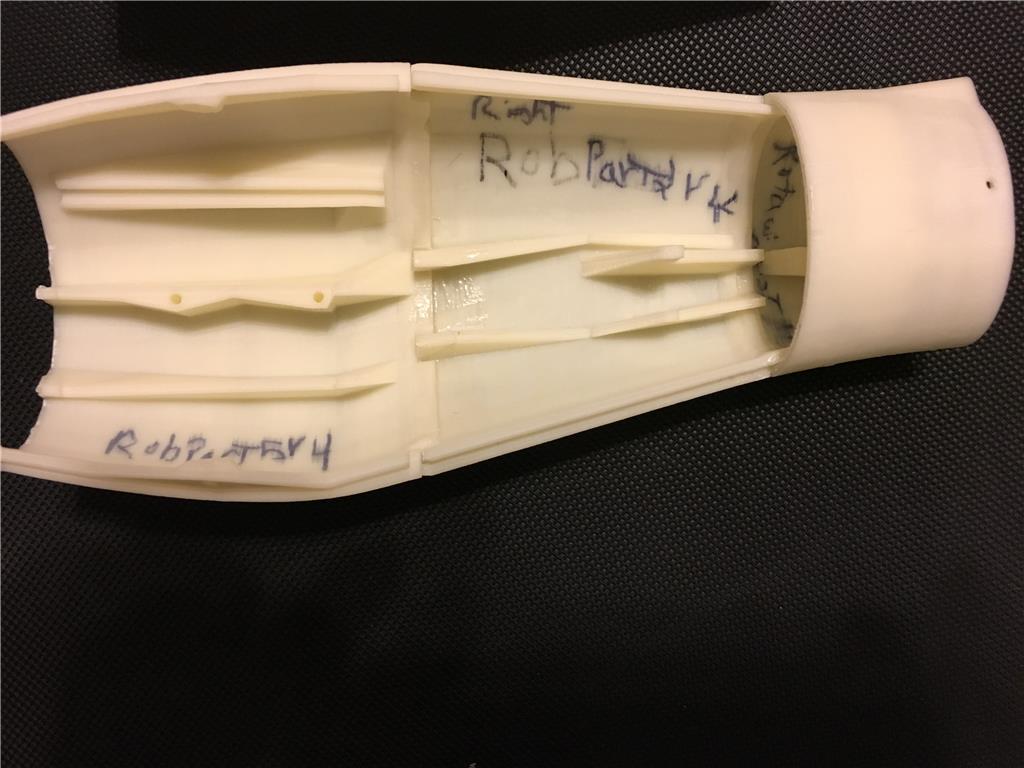
-Create a water resistant area protected from spashing and weather for the electronics
-make some kind of seal where the panels come together
-GPS geofence alarm and active tracker
GPS tracking unit, with built in battery so it tracks even if the main battery is removed.
https://www.ebay.com/itm/232479396529
No IR Raspberry Pi 5mp camera with 130 degree lense