
-636459989693042832.jpg)
-636459989943960739.jpg)
-636459990485479714.jpg)
-636459980560649389.jpg)
-636459975718038038.jpg)
-636459969210457653.jpg)

-636459967995726605.jpg)
-636459970865108143.jpg)





















































-636465120384538626.jpg)
-636465113490053830.jpg)














-636475595612490698.jpg)





















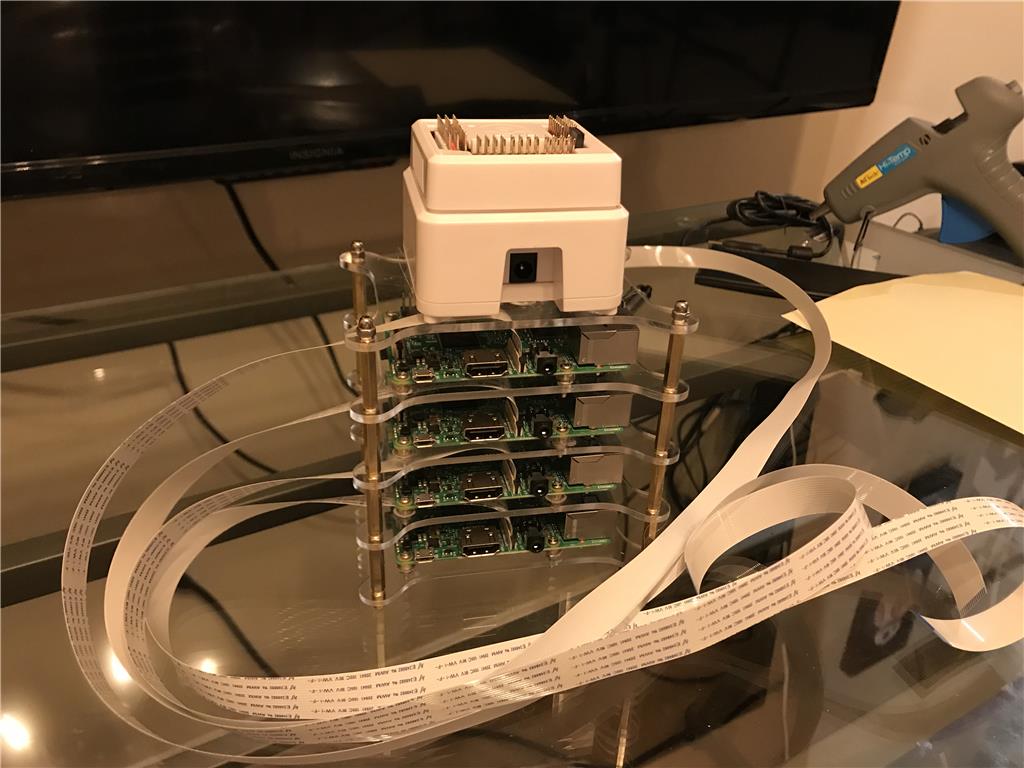
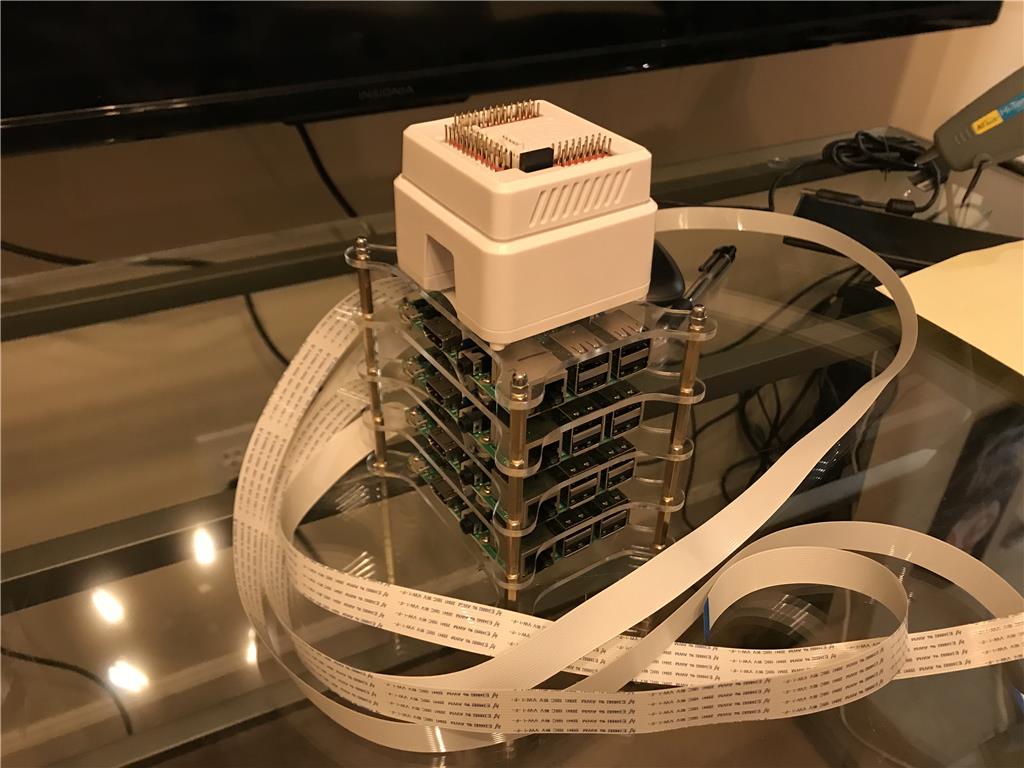
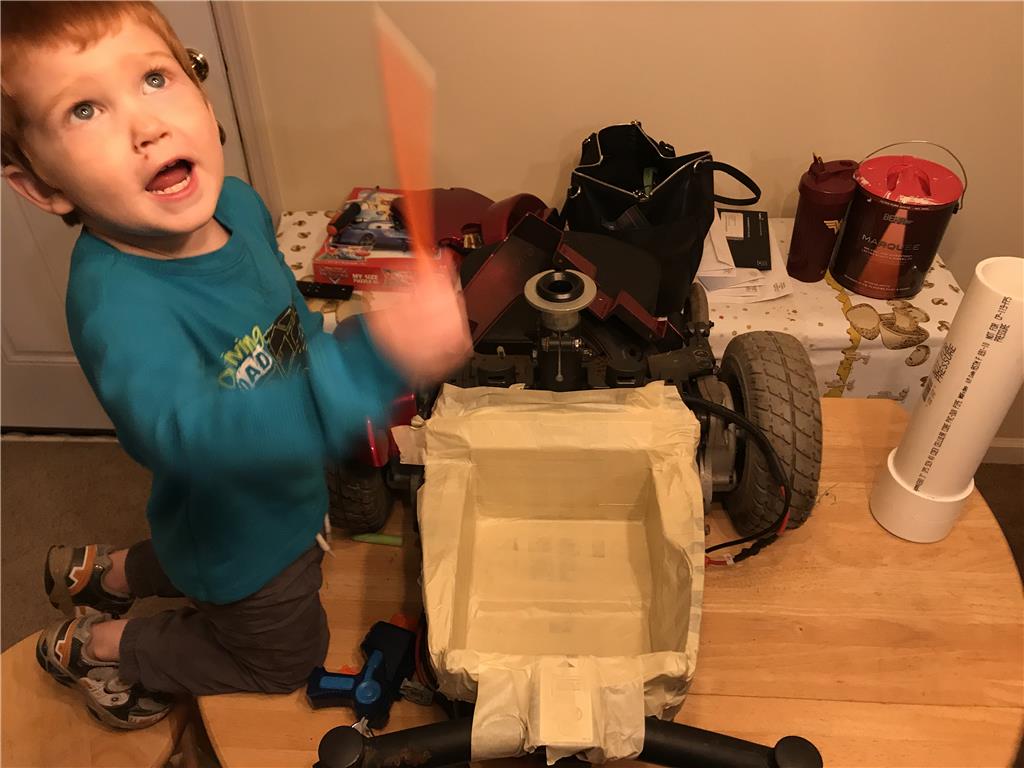
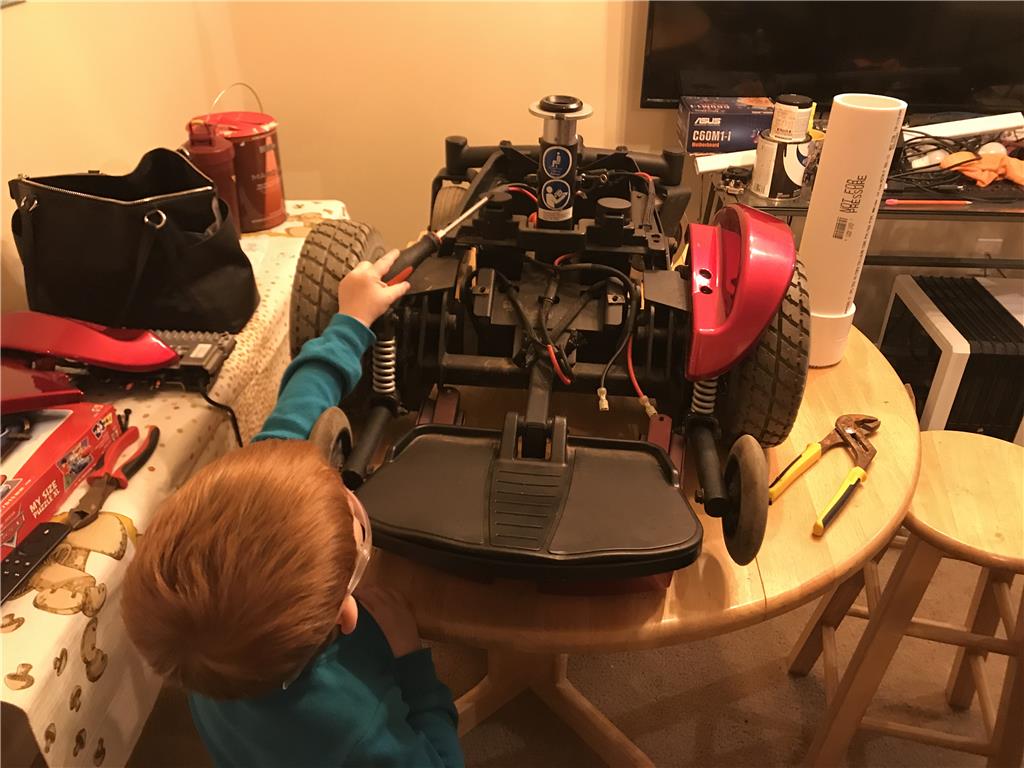
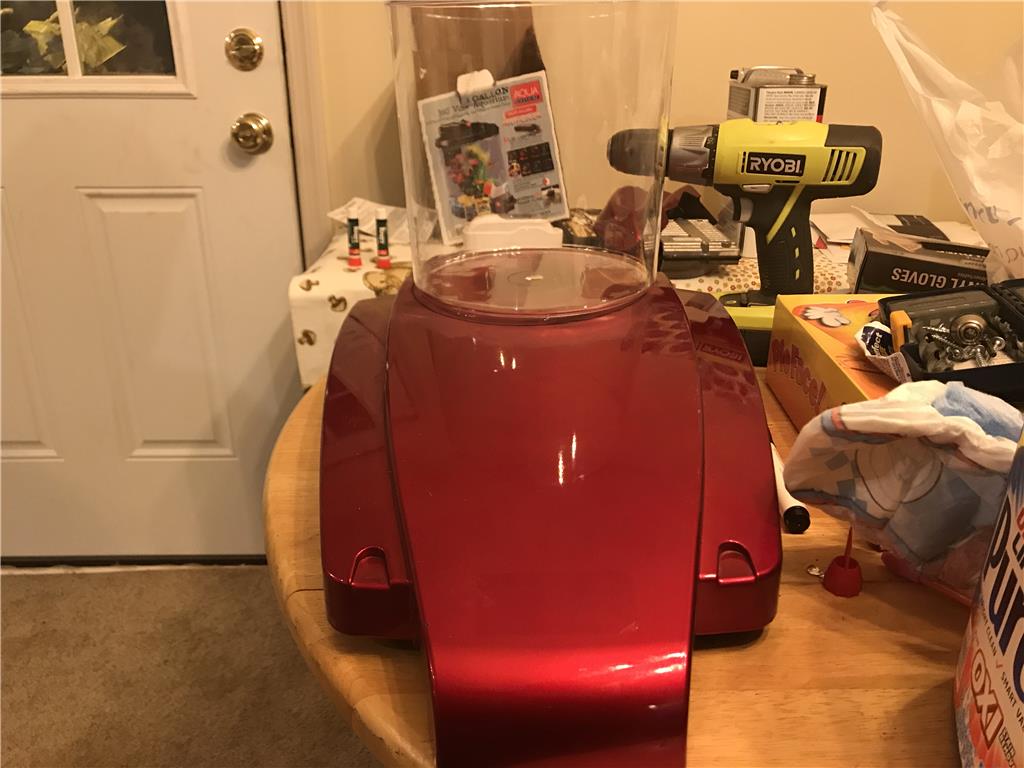
Here is the current look of this project, Super cool update, magpi magazine wants to feature this build with steps how it was done , !

By jstarne1
— Last update
Discover more robots

Cliffordkoperski's Cliff Robot
Cliff robot test run showing motion without gyro/accelerometer; future sensor demo planned; affordable Oak Studios servo...

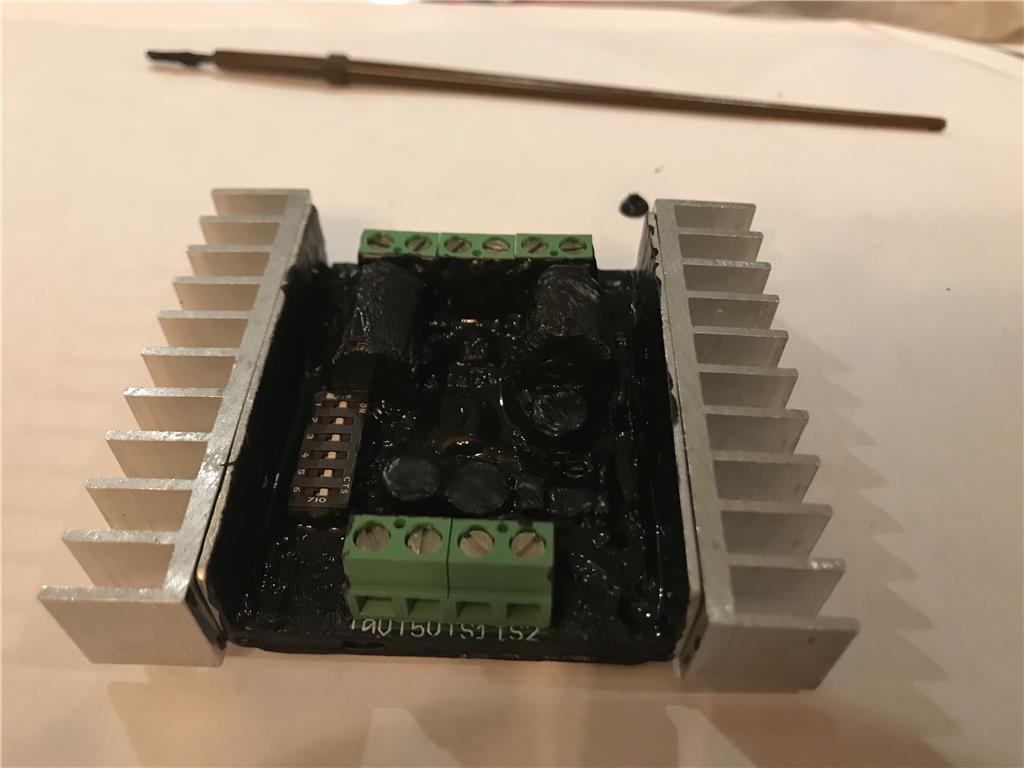
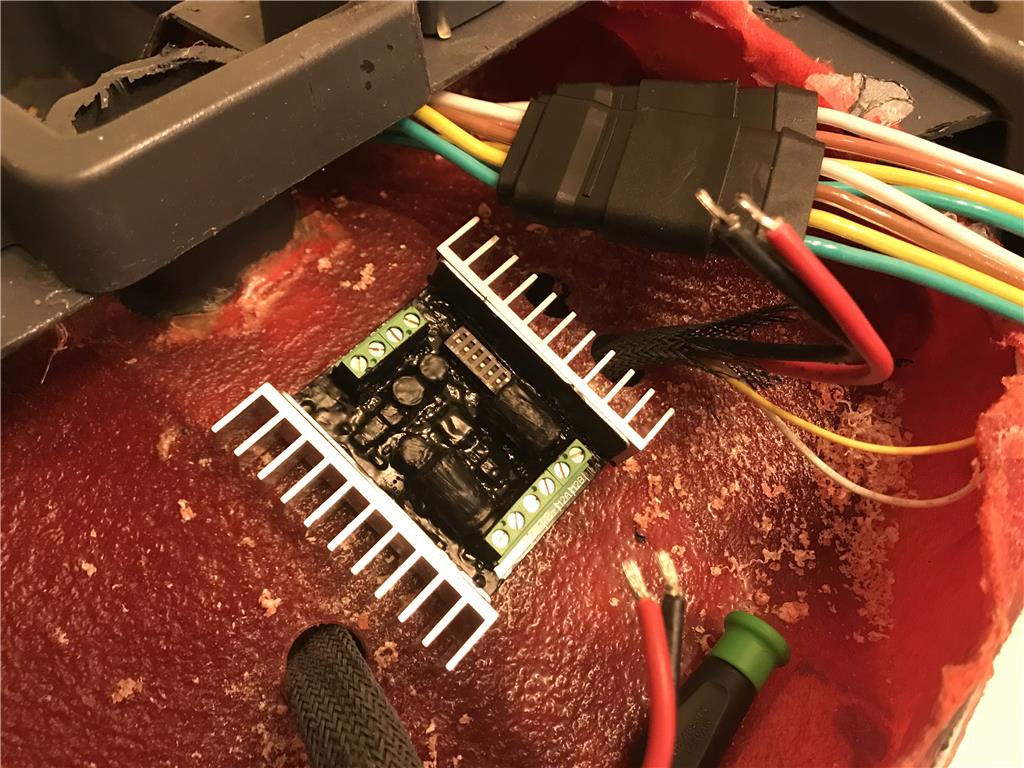
Markthebotbldr's R2D2 Interactive Hacked!
Hack R2-D2 interactive with EZ-B v4, dual L298N motor controllers and a Synthiam ARC mobile app; add sensors for...

Ezang's Mr. Metal Robot 2020
Synthiam ARC controlled Talking Mr. Metal robot with EZ-B4, 2 IO Tinys, RGB eyes, ServoCity gears and DFRobot hex base...

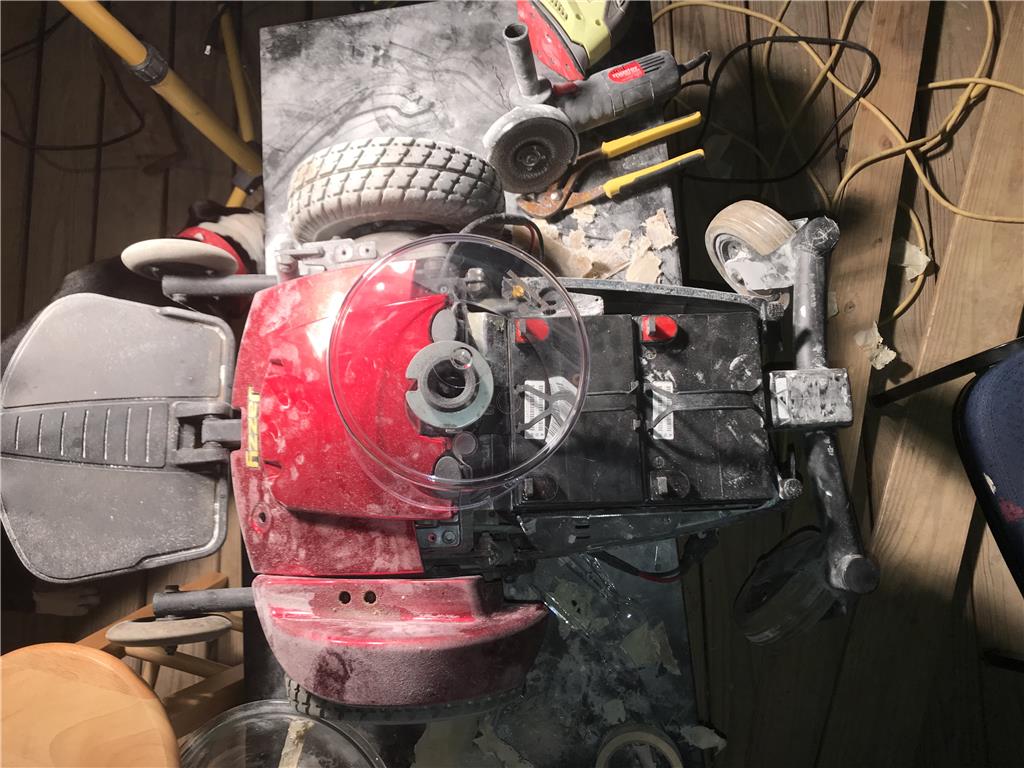
Sabertooth is on idle but powered on. The Robot is not moving for this initial test , I wanted to get some base numbers as most the time the Robot will watch and wait , it doesn’t run around continuously.
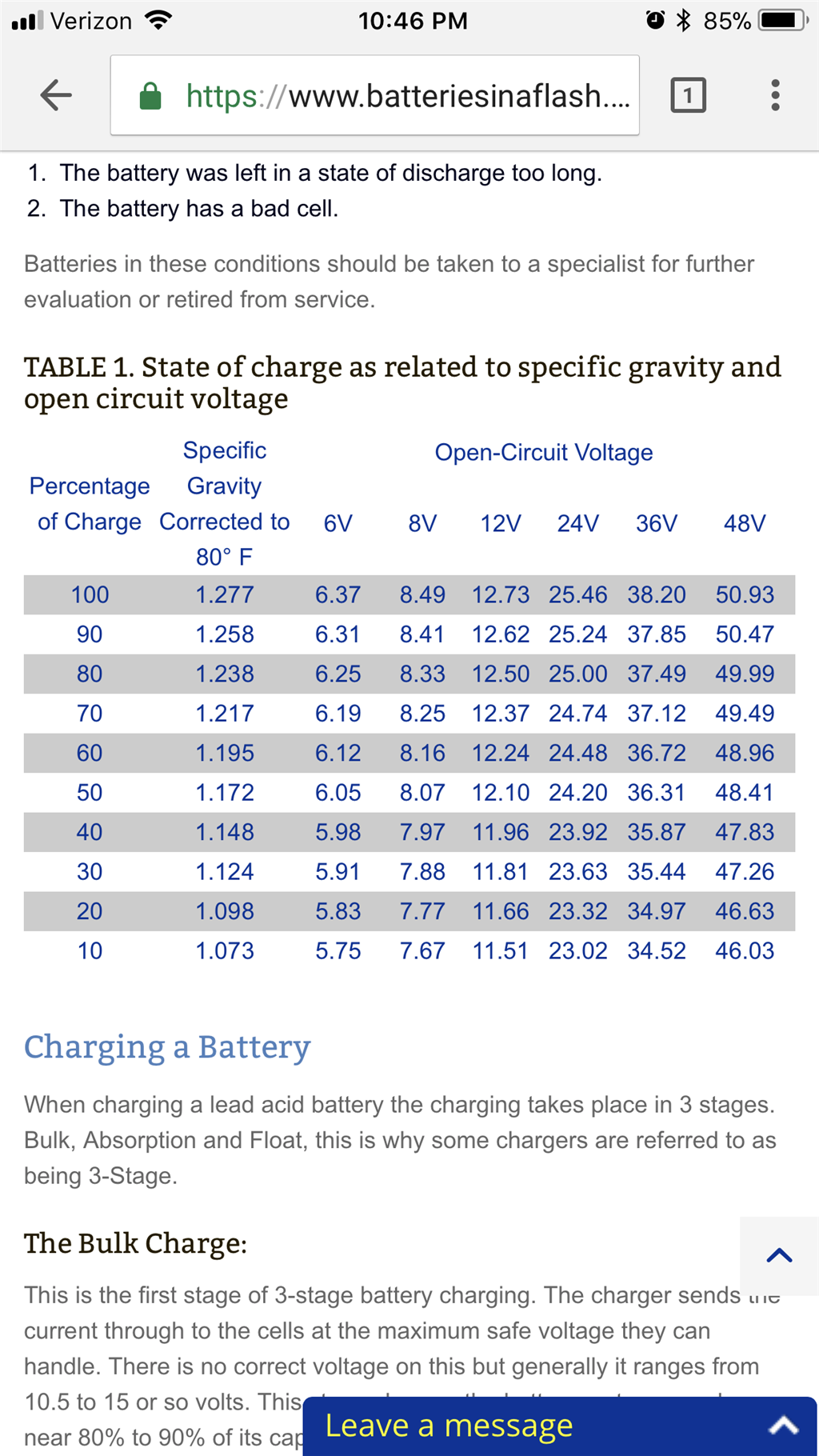
Ok, Update on the runtime test, the robot was idle but all the equipment except the IR leds ( which consume 24 watts max) , motion and ultrasonic sensors. You can see the pictures of the starting voltage and the end voltage. Doing research I found 11.8 is considered dead for a 12 volt battery. or 23.6 when two batteries are together. I notived after 24 volts the rate of drop increased and was quicky down to 14 volts for the combined batteries. Still enough to power the robot , but bad for the overall life of the batteries! So in the future I am considering 24 volts " dead".
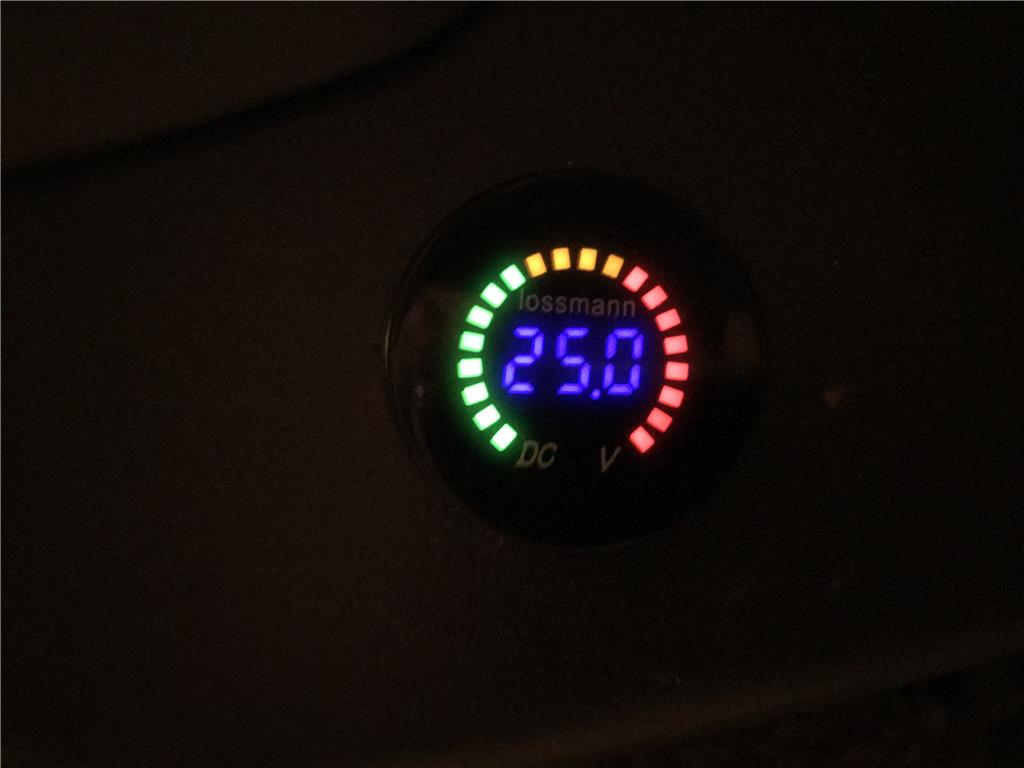
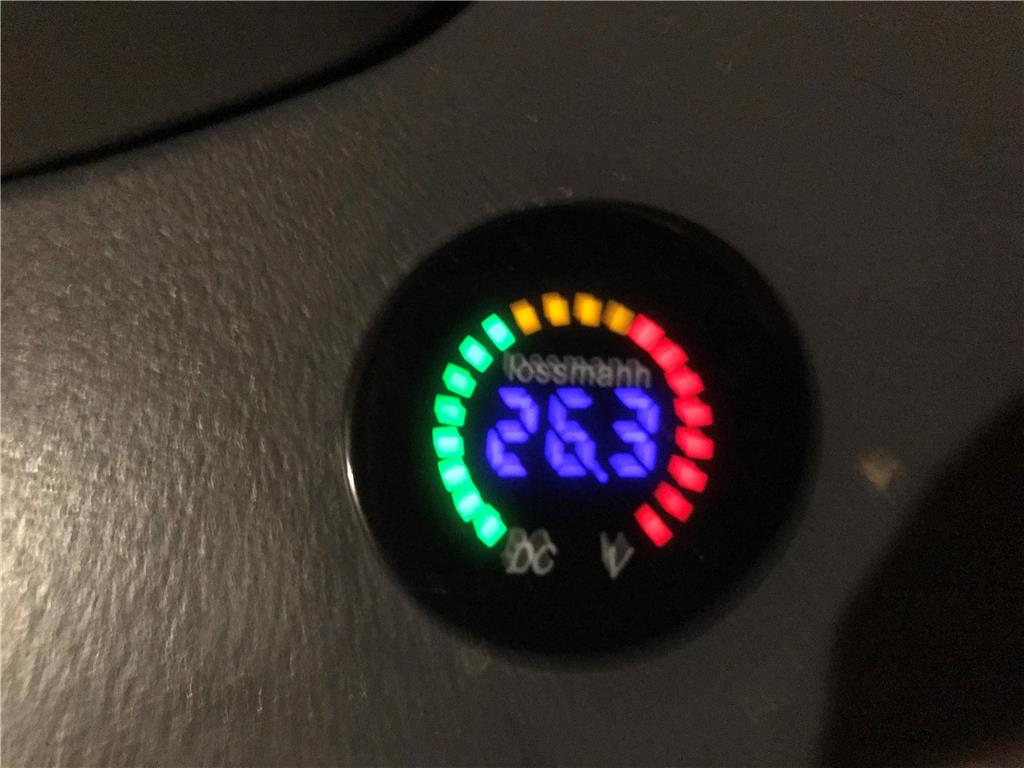
I wanted to test the battery longetivy, My goal is 24 hours without human intervention. Here is the starting voltage. ( I later found out that my batteries were not full when I started)
25.2 apparently is not 100 percent full, maybe these batteries were being broken in.
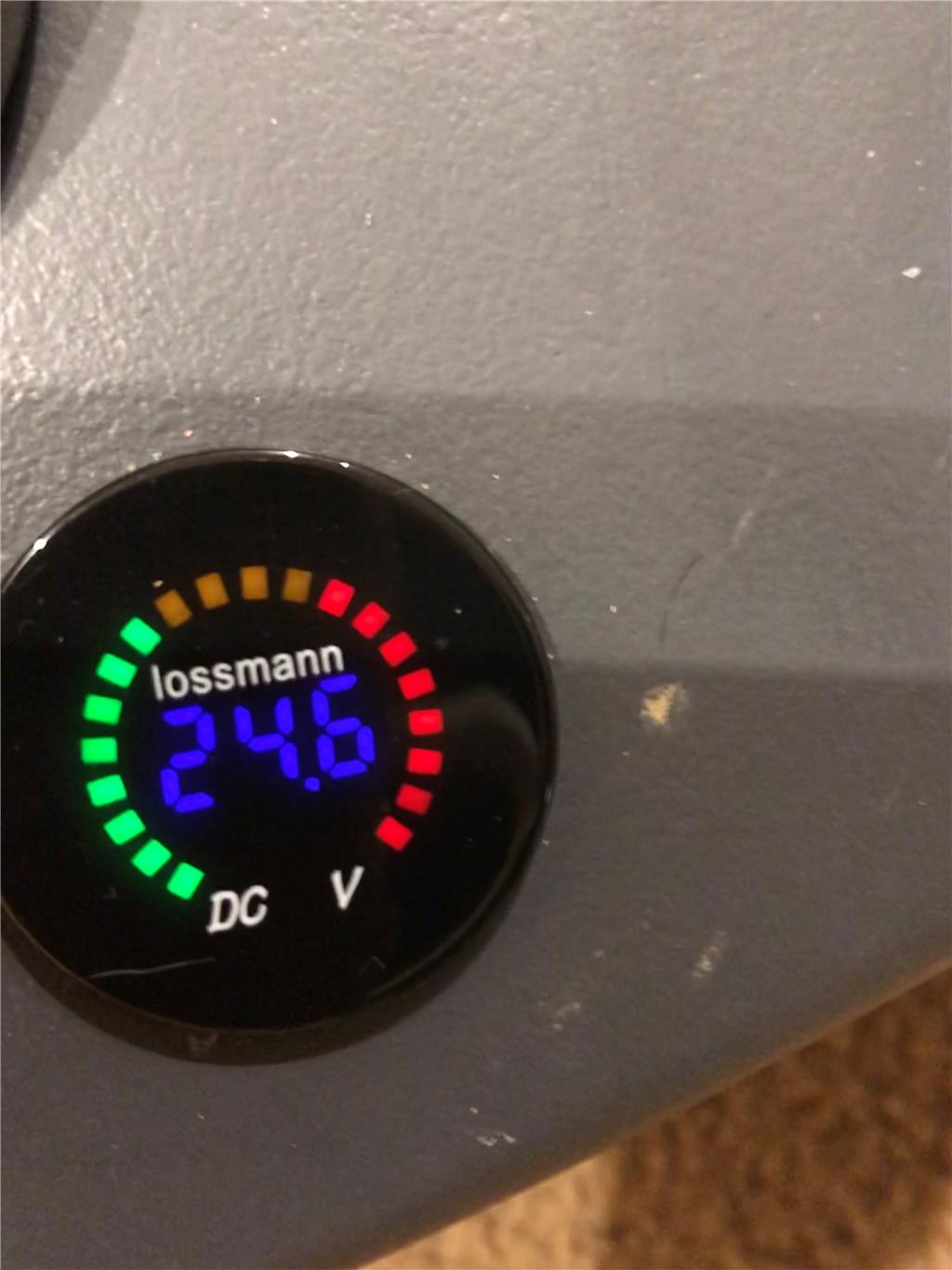
Excellent news ! After 24 hours runtime I still have battery life left.
24.6 volts from the 25.2 starting voltage. That is an average of .025 volts drop per hour.
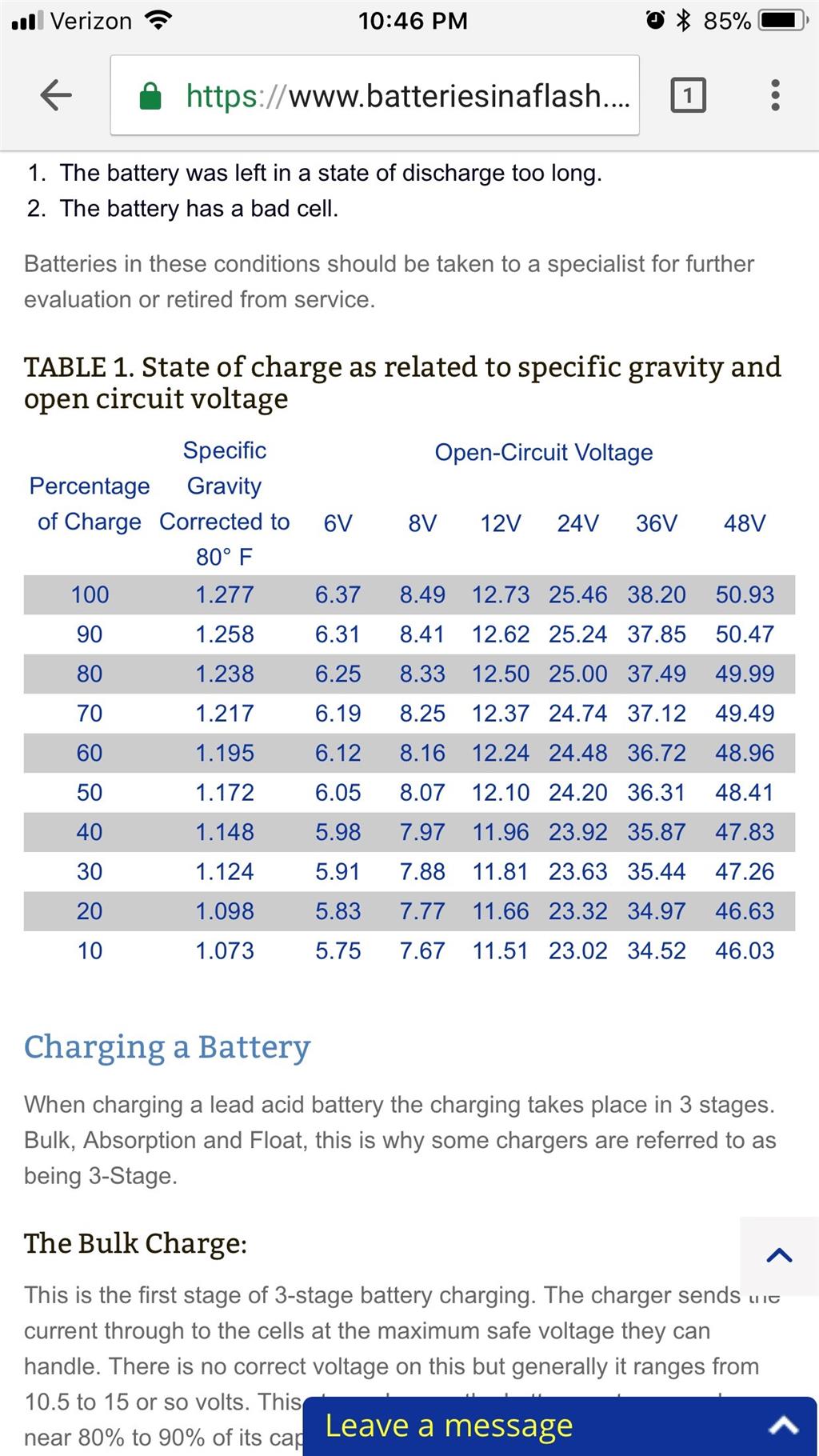
Here is a reference chart I am comparing to for the battery capacity, take in mind I am running 24 volts.
after about 32 hours I was at 24 volts even but I wanted to see if I could make it to an even 48 hours. I pulled the plug on the battery for recharge at 42 hours.
I charged both batteries on two 3 amp chargers for 12 hours and now they read a higher combined voltage than before! So apparently when I started this test I was only at about 80-85 percent battery capacity.
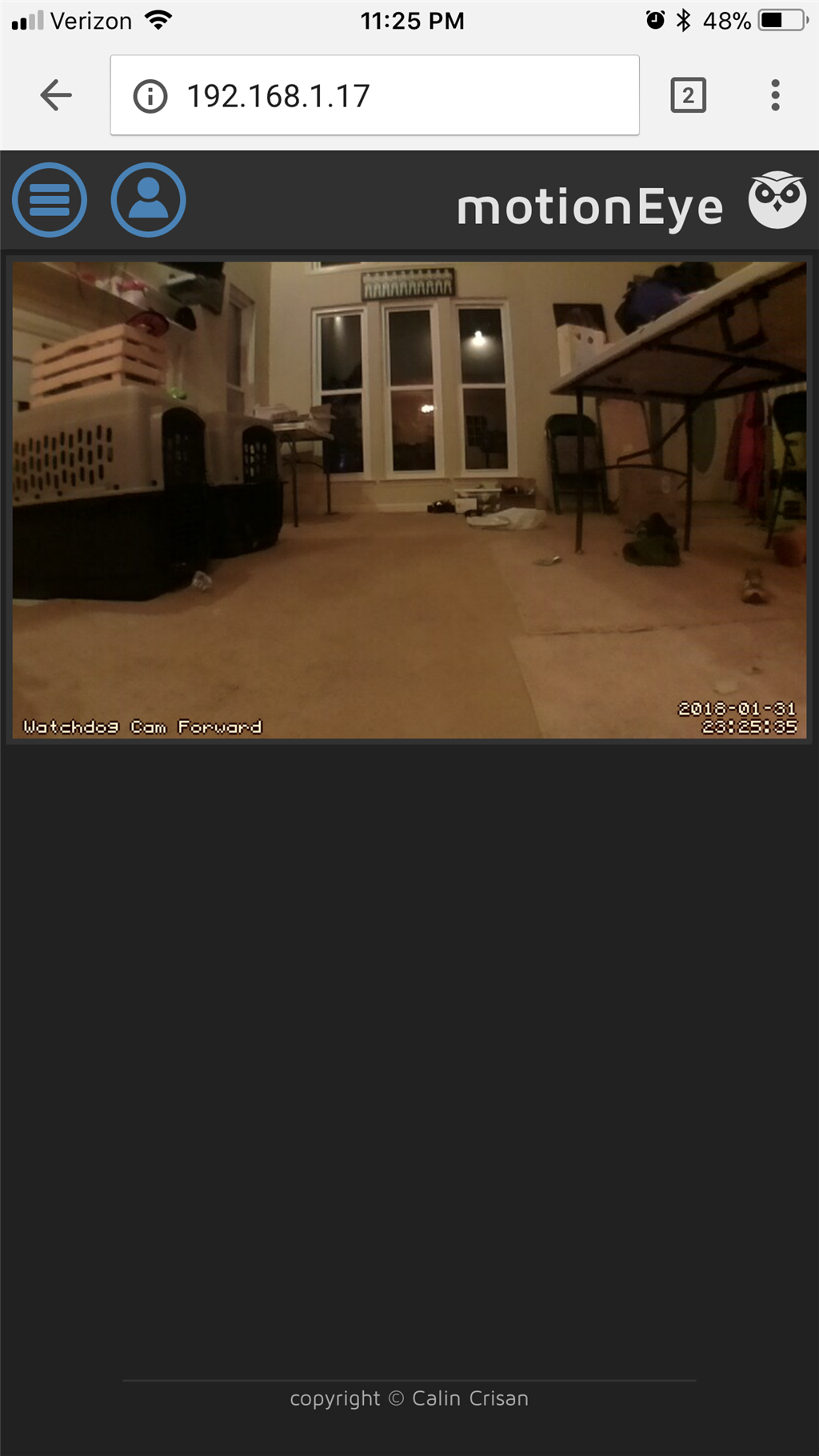
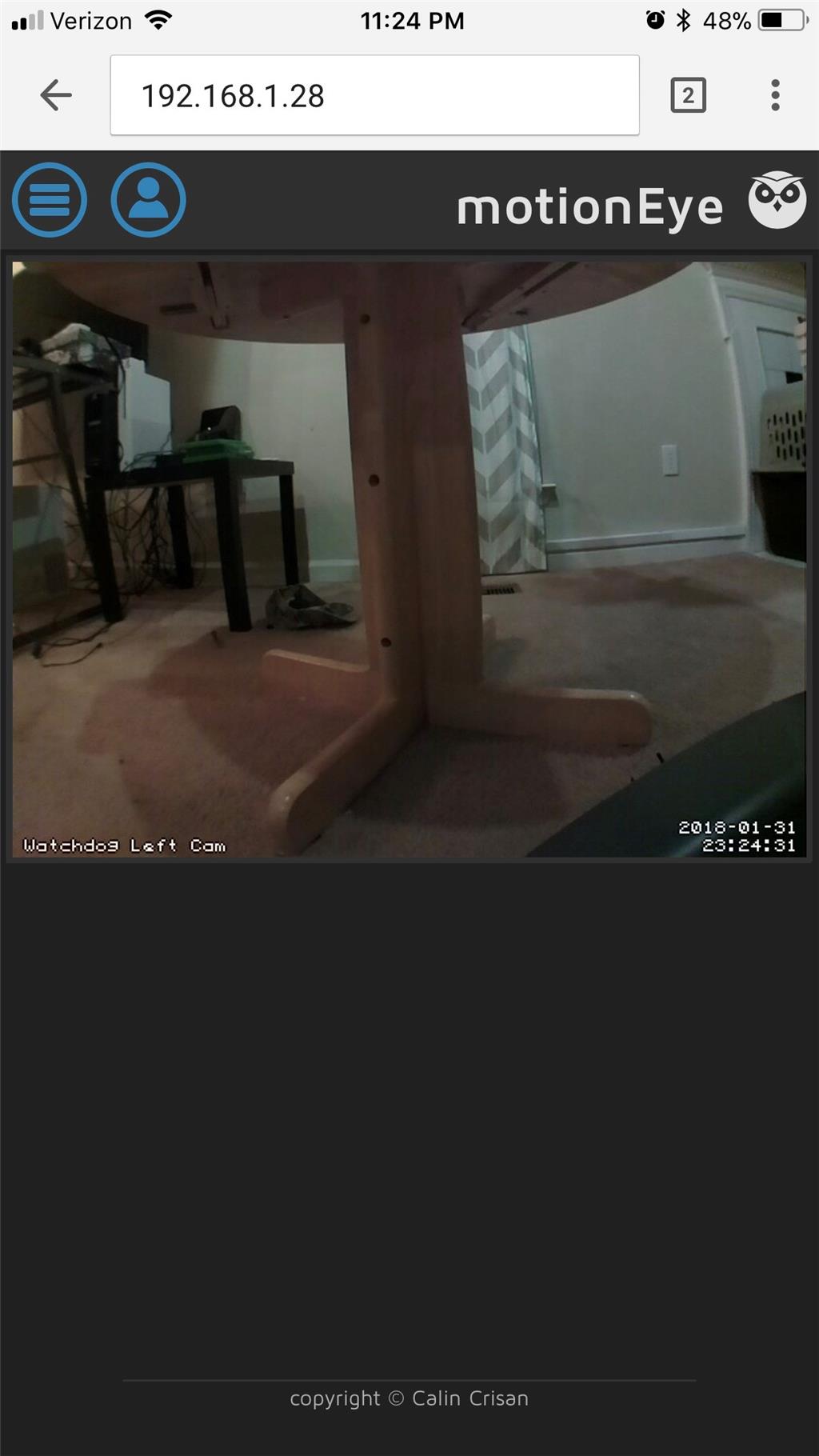
sample screen shots of night cam, pardon the cluttered play room.
Watchdog forward cam on initial boot
Watchdog right cam
Watchdog left
I forgot the Ip to the rear cam so I didn't grab a screen on that one.
This is amazing work. I missed following your work this past year or so while you were on robot sabbatical.
Thanks Dave I appreciate that! I enjoy your company and spectator-ship.
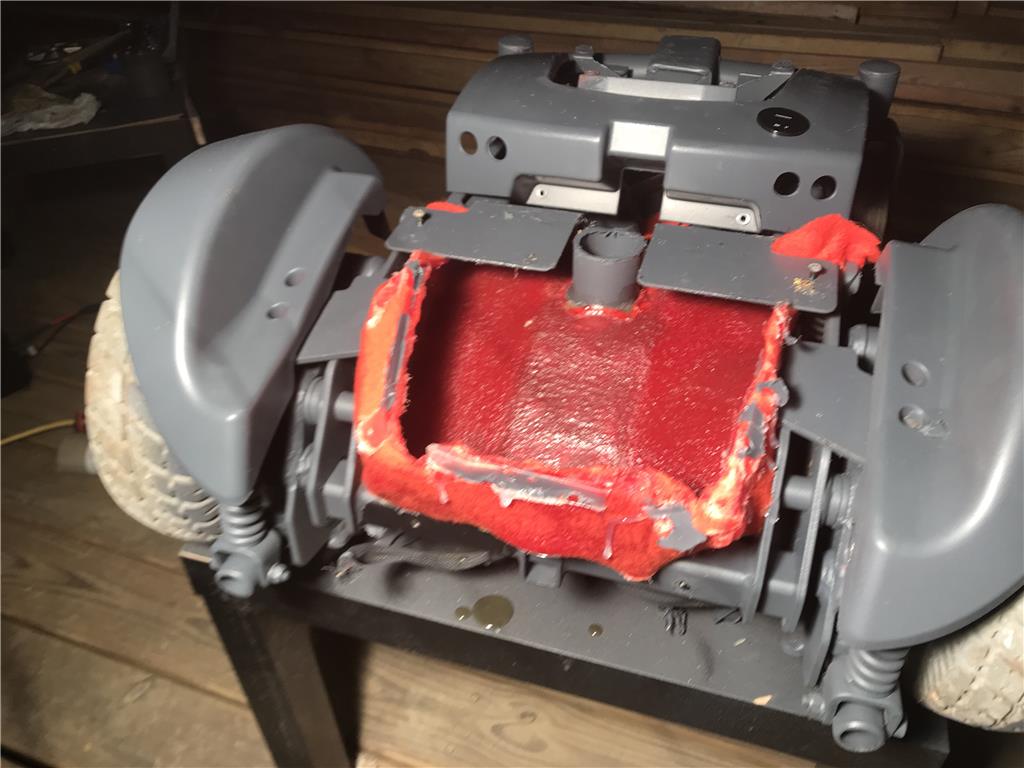
Nice work! I have used the same wheel chair base for robots before. Great platform to work with.
You do amazing work.
-Sean