

-636459989693042832.jpg)
-636459989943960739.jpg)
-636459990485479714.jpg)
-636459980560649389.jpg)
-636459975718038038.jpg)
-636459969210457653.jpg)

-636459967995726605.jpg)
-636459970865108143.jpg)





















































-636465120384538626.jpg)
-636465113490053830.jpg)














-636475595612490698.jpg)





















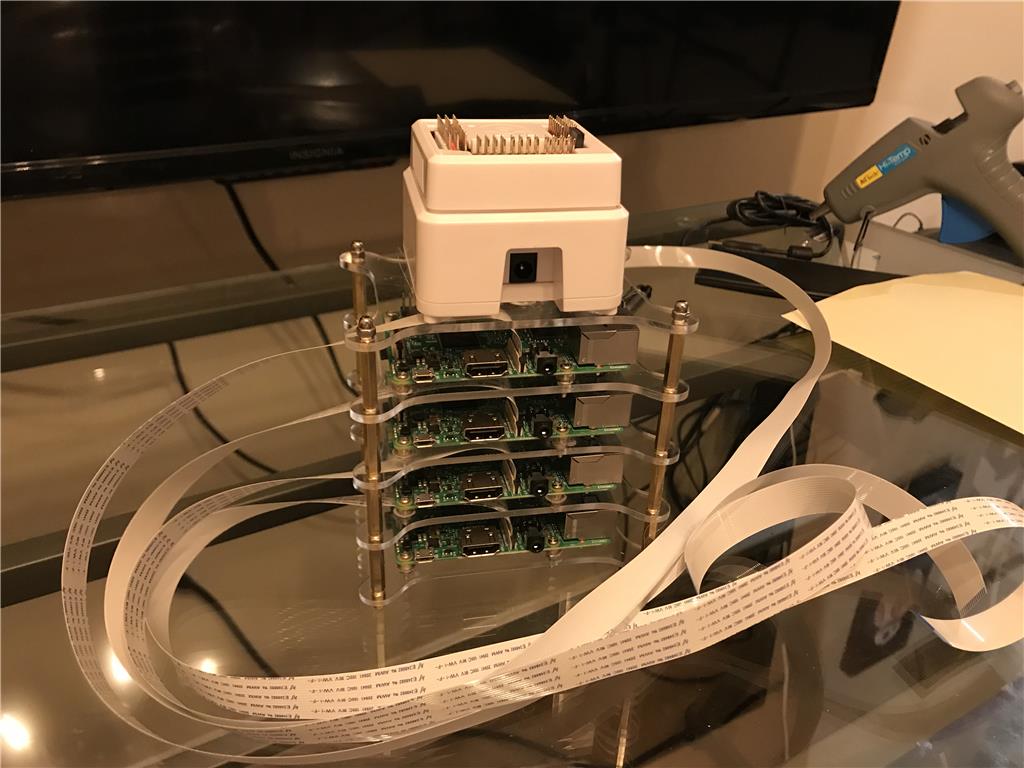
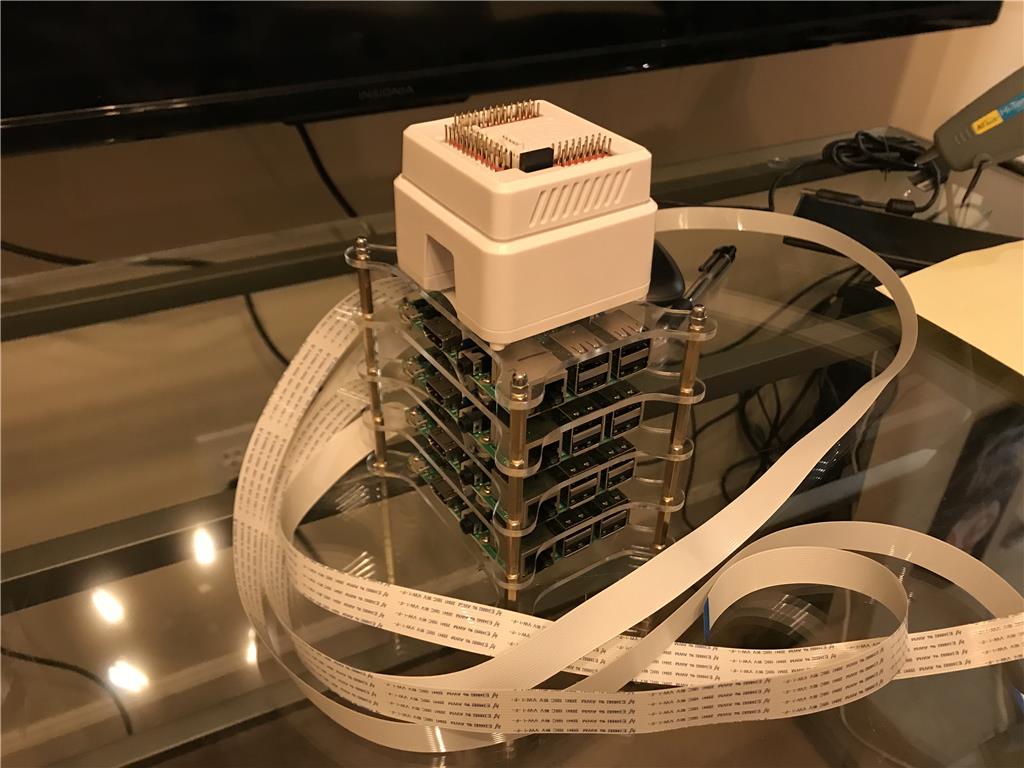
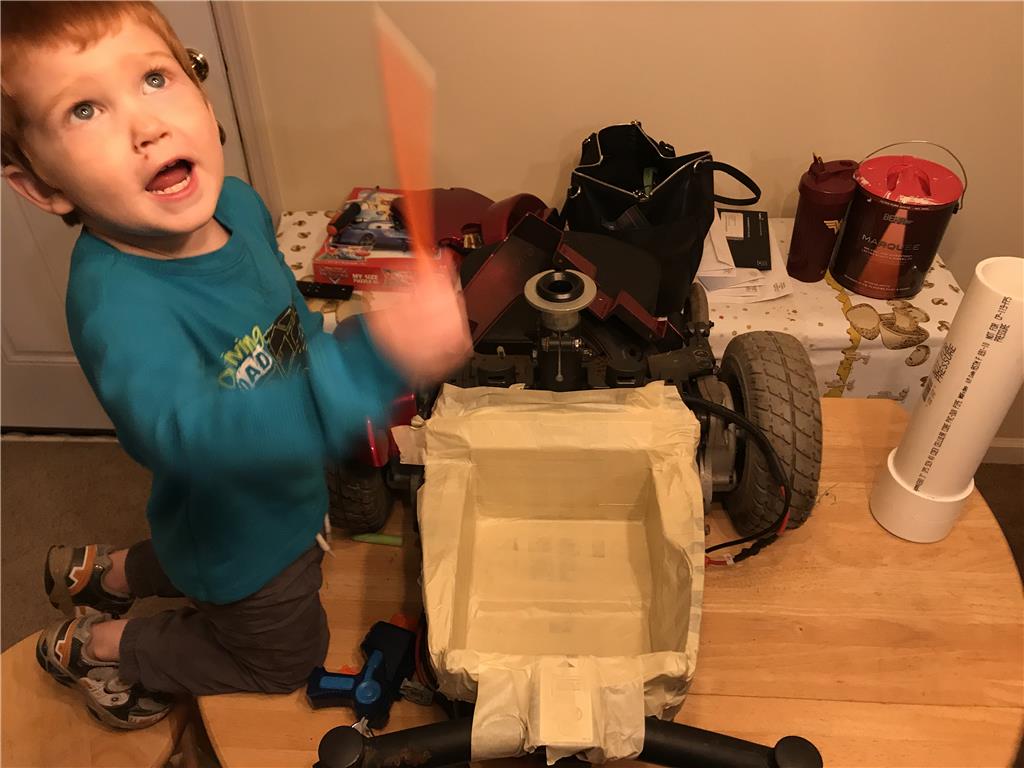
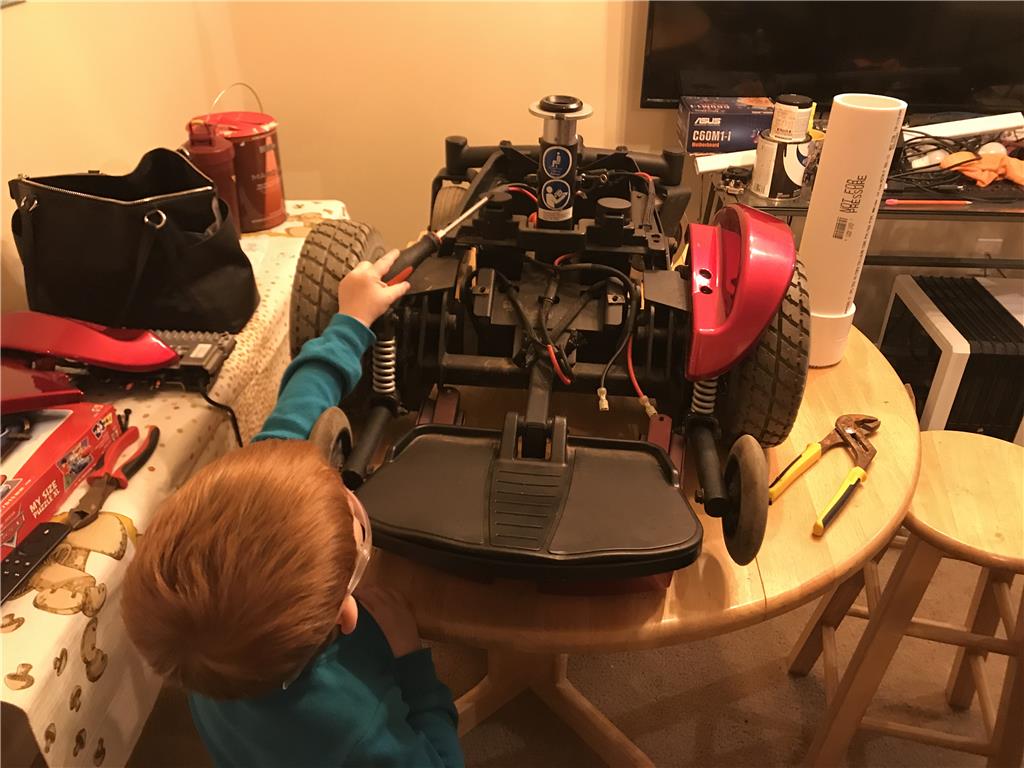
Here is the current look of this project, Super cool update, magpi magazine wants to feature this build with steps how it was done , !

By jstarne1
— Last update
Discover more robots

Hoolagen1's Pics Of Progress.......
WALL-E head with EZ-B, multi-servo neck, eyes and arms with eye twitch; chest plate opens to reveal the EZ-B logo

Steve's 2 Ft Biped Walking(Shuffle) Robot
Omni-wheel robot build: overcome turning and weight distribution with center-pivot knees/hips; PVC construction and...

Smarty's Synthiam - My Robi 2.0
Robi 2.0 with EZ-B 4.0: 21 servos, 22ft cables, 6 sensors, camera, LED boards, stereo speaker; 17.8 in tall, 5.0 lb, 6...

Looking real Good ! and strong ! No possible chance for a ride ?
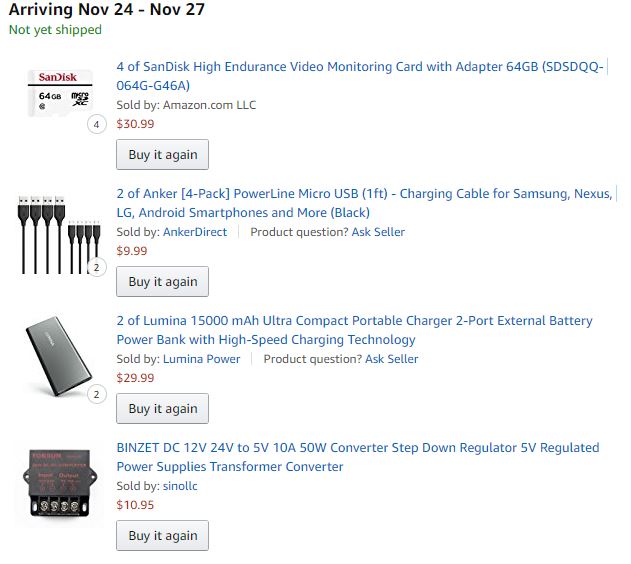
After 7 hours I checked the batteries voltage. Watchdog only lost .2 volts in 7 hours of recording !
Haha , I’ll let him ride when I am outside and done have much to run into , and a helmet on him!
12 hour test update:
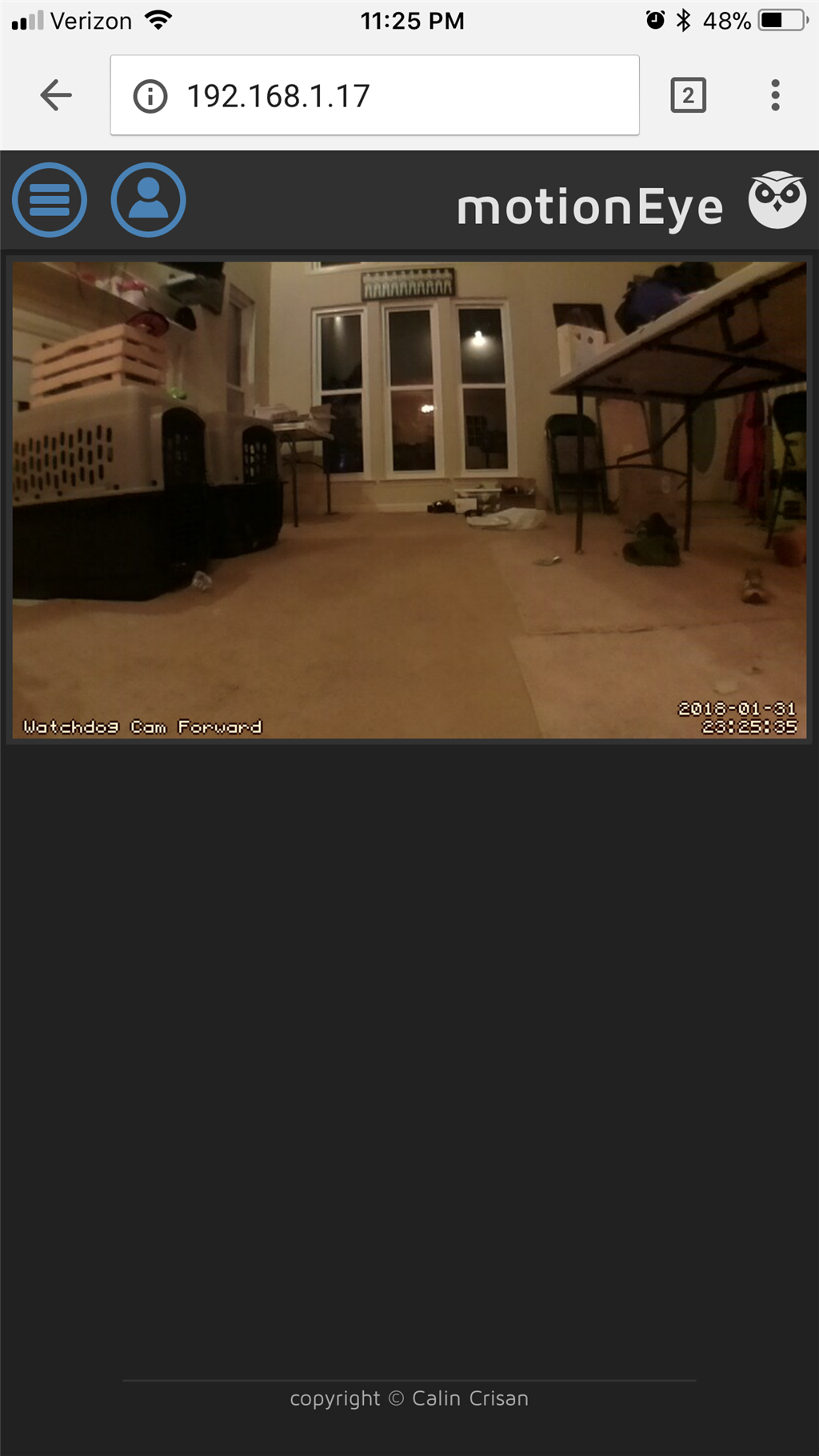
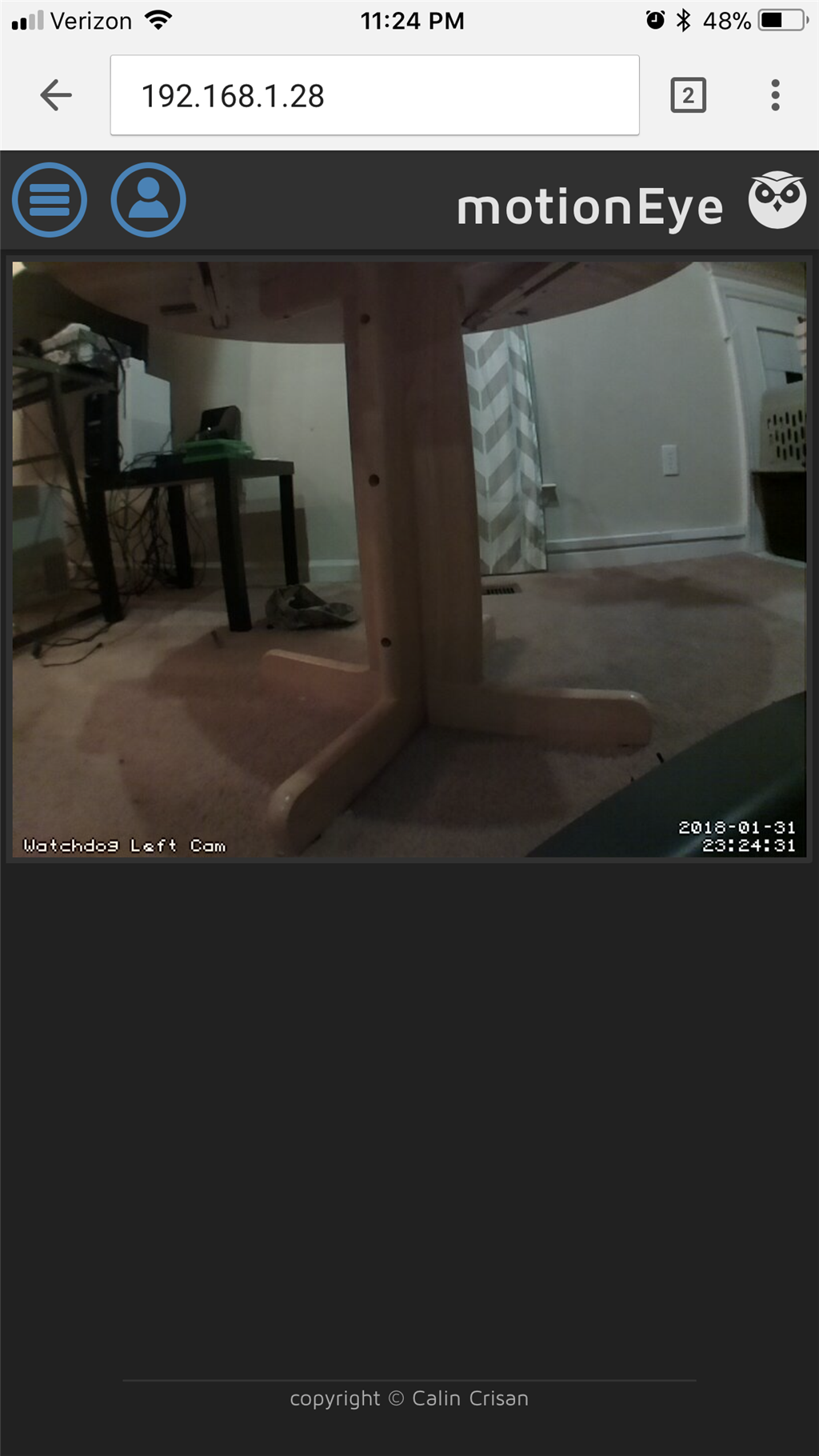
Watchdog met it's first goal! 12 hours unmanned / no humans , I am checking Watchdog from remote desktop and it is still going strong, I started the first test at 11:30 pm last night. I cannot see the battery meter from here, but I will be able to check the battery around 5-6 pm. Hopefully Watchdog can make it to 11:30 tonight.
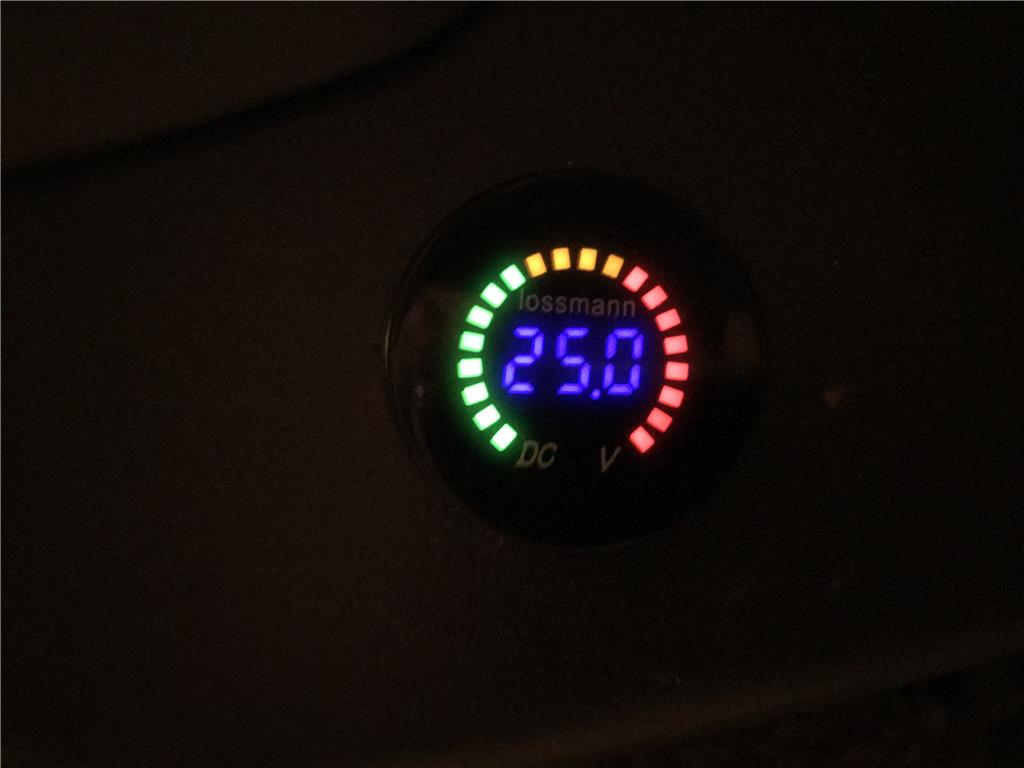
Almost 24 hours from the time Watchdog was powered on , I still have over 24 volts!
.6 volt loss since yesterday night!
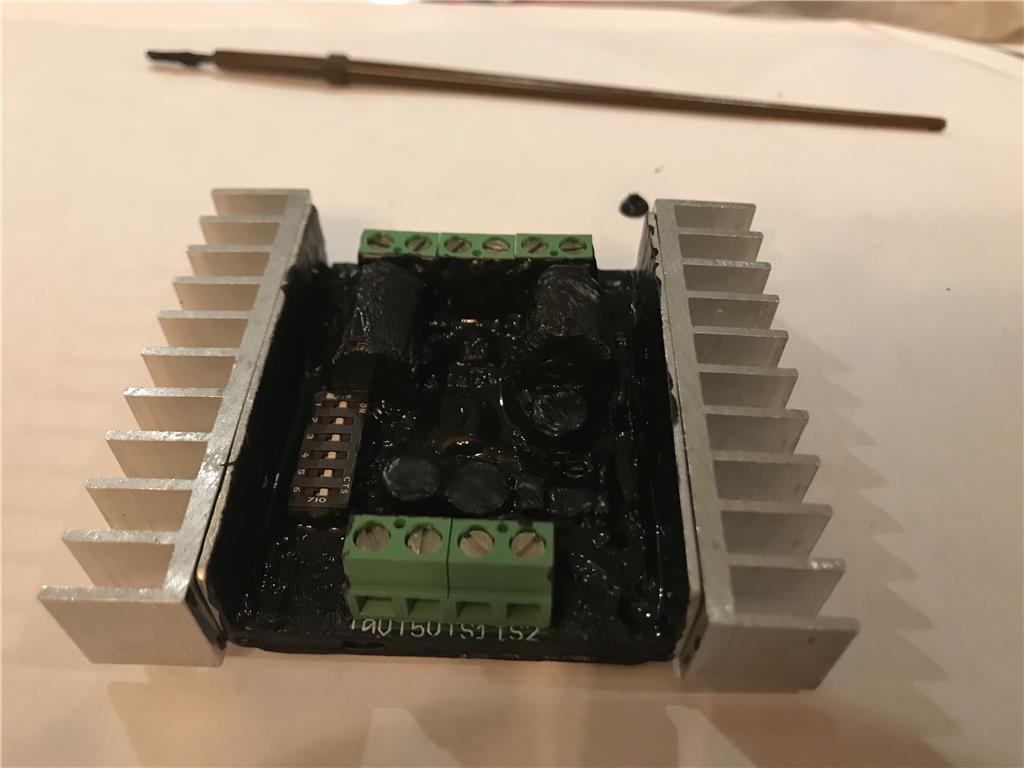
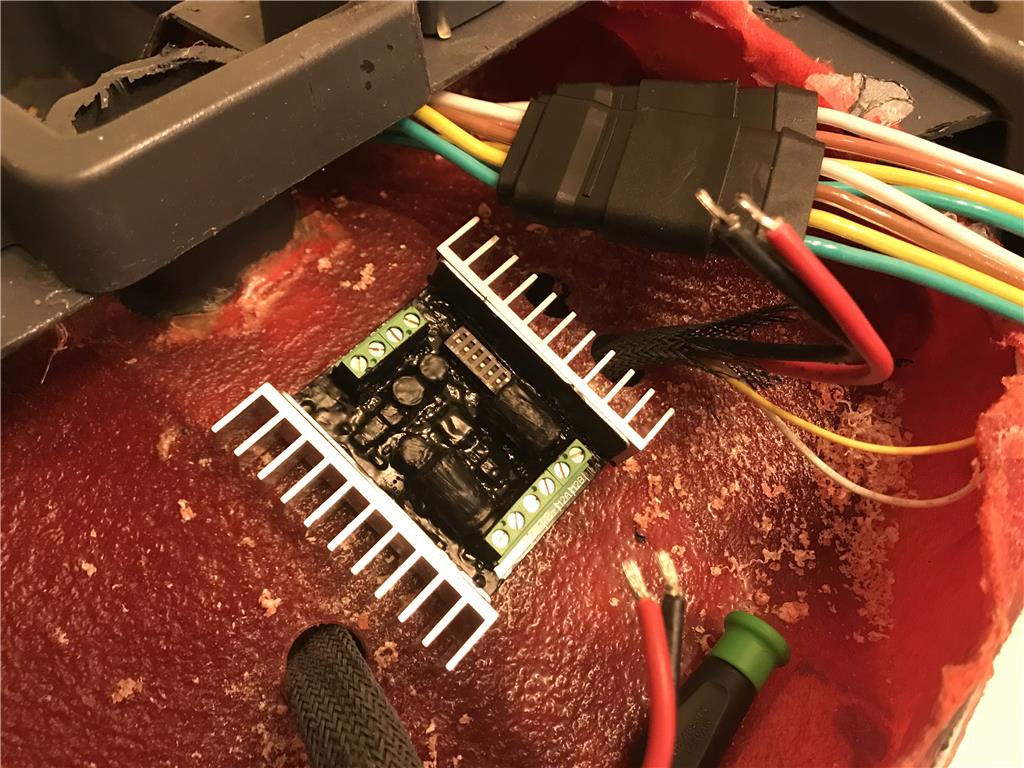
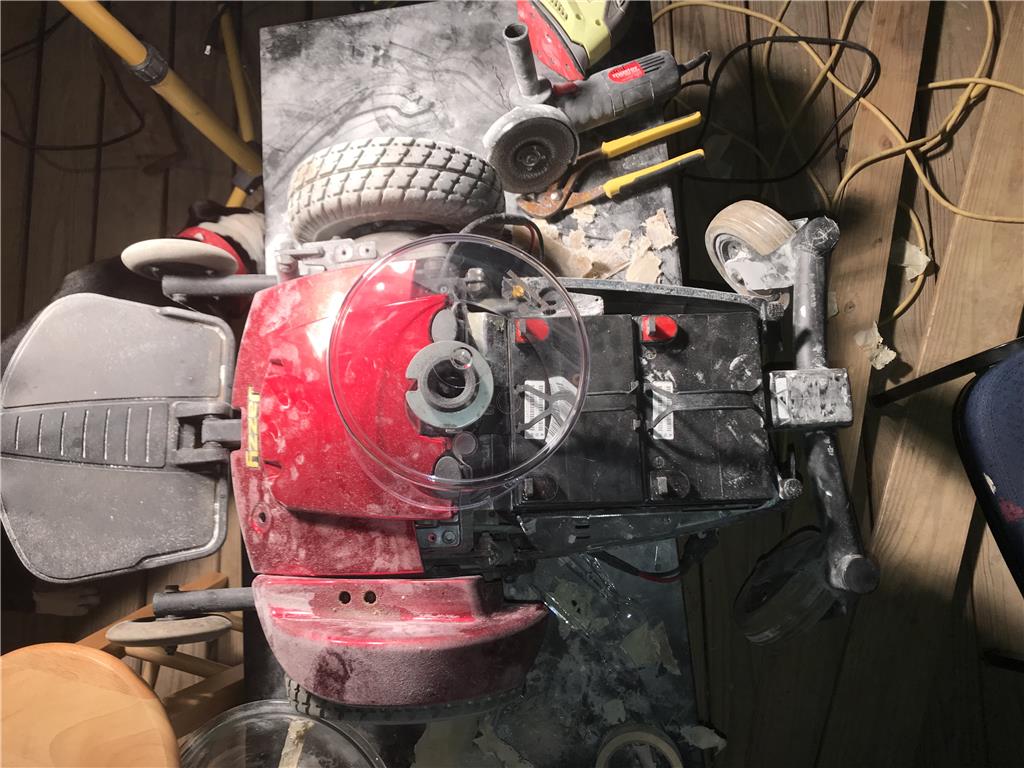
I am very happy with the efficiency of the equipment. All cameras have been recording and the sabertooth and the 5 volt dc to dc converter are being used.
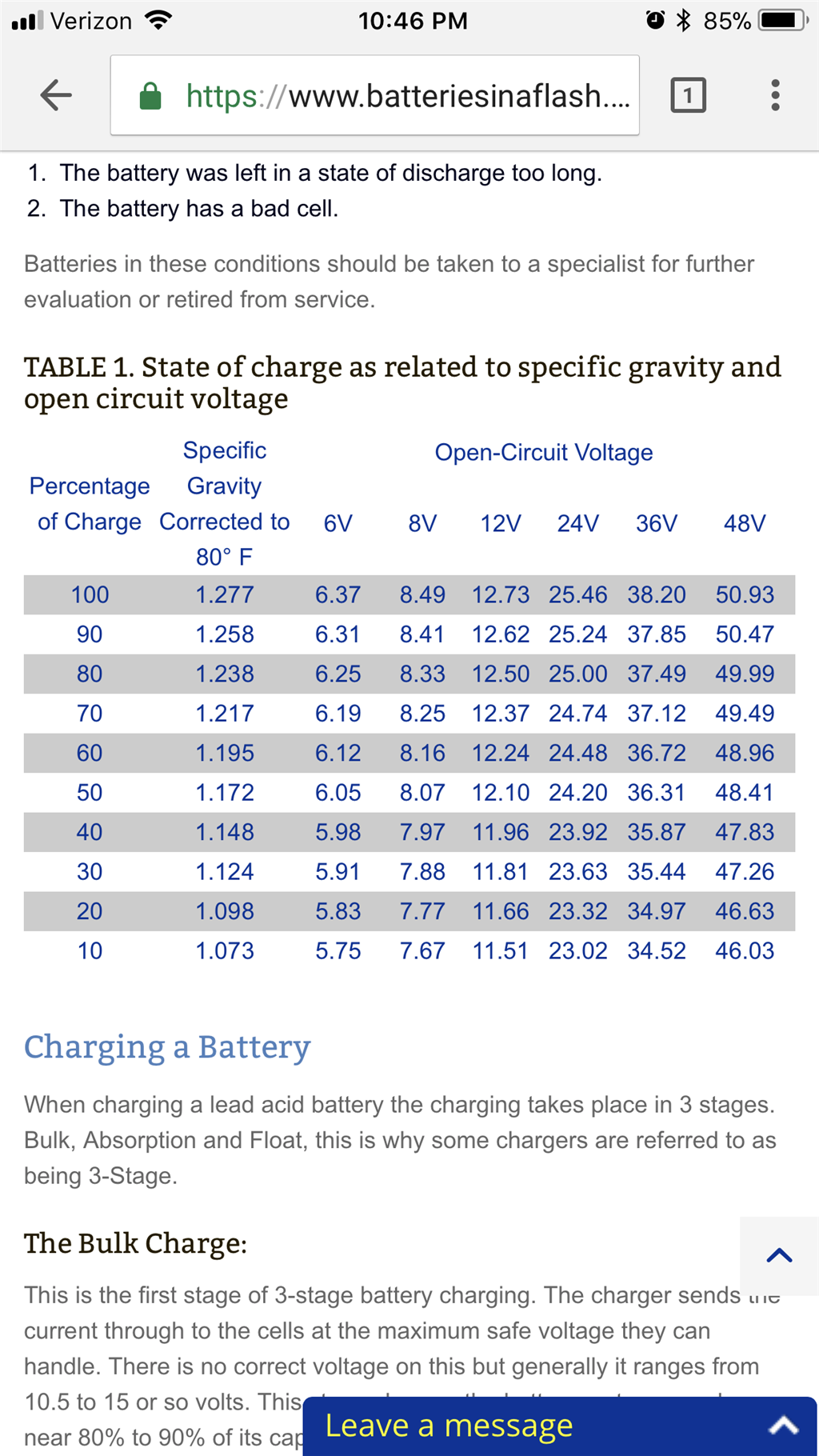
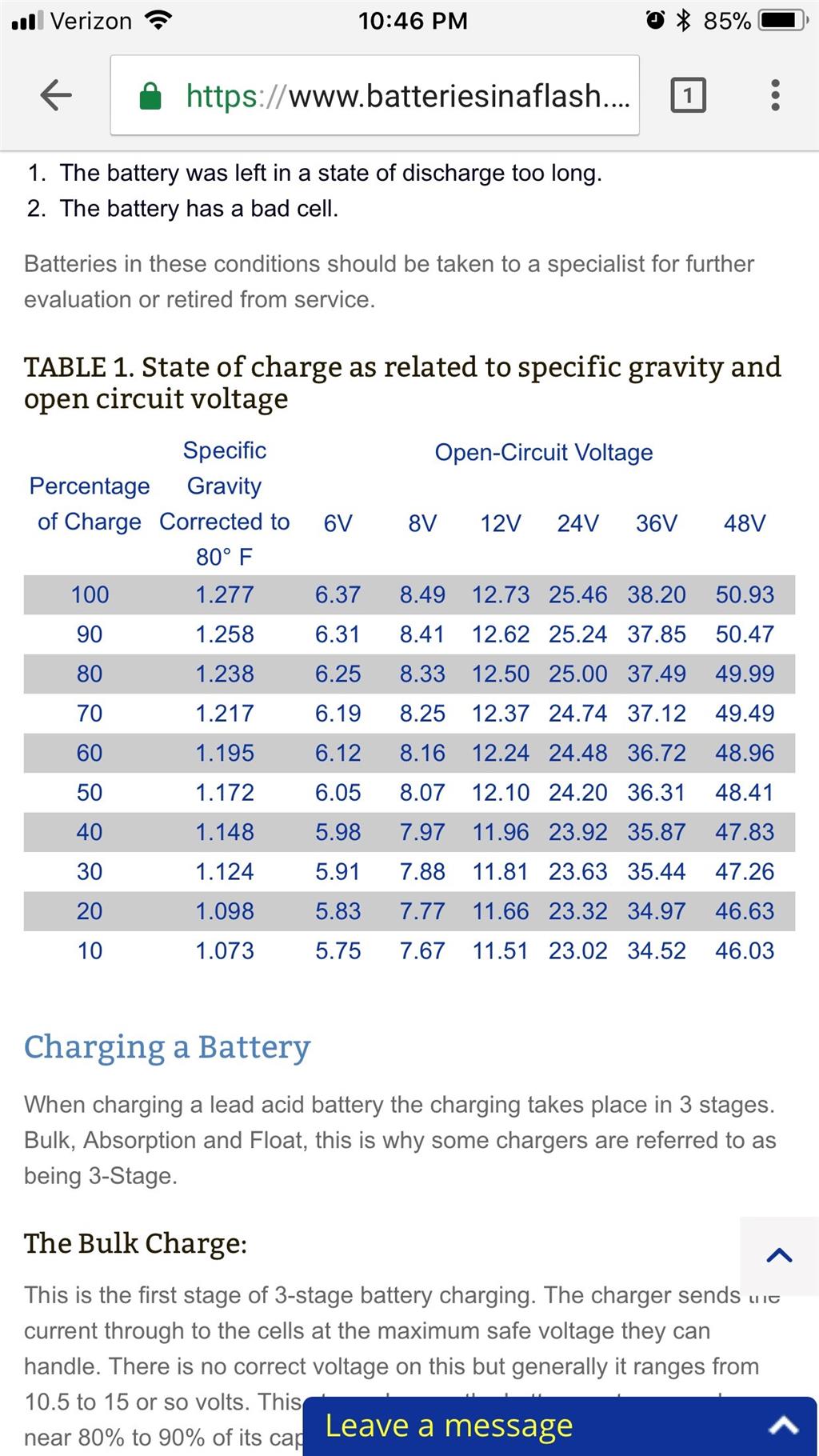
Doing some research I found charts that indicate the voltages of batteries to consider Dead so that they will not be damaged and still have hundreds of cycles
24.2 has 50 percent capacity left and 23.02 has 10 percent left and certainly considered dead so this should be the cutoff voltage for the health of the battery. I will let the bot run overnight tonight as well and see where we are at. It would certainly be great to break a 48 hour runtime before hitting cutoff voltage.
So is this robot physically moving or navigating the house at night or sitting in one position? If it’s not moving what is the saber tooth being used for?