
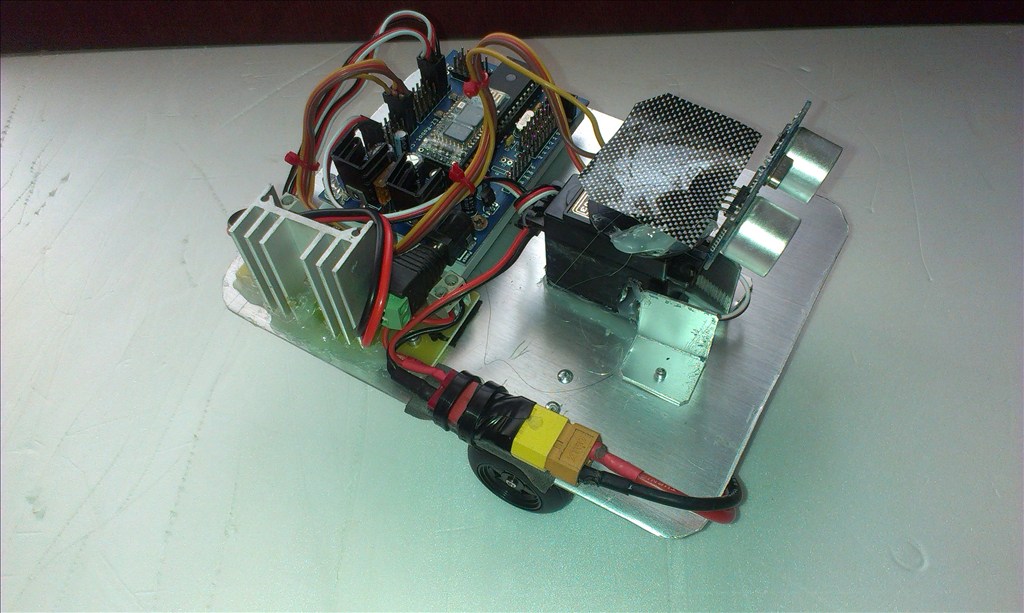
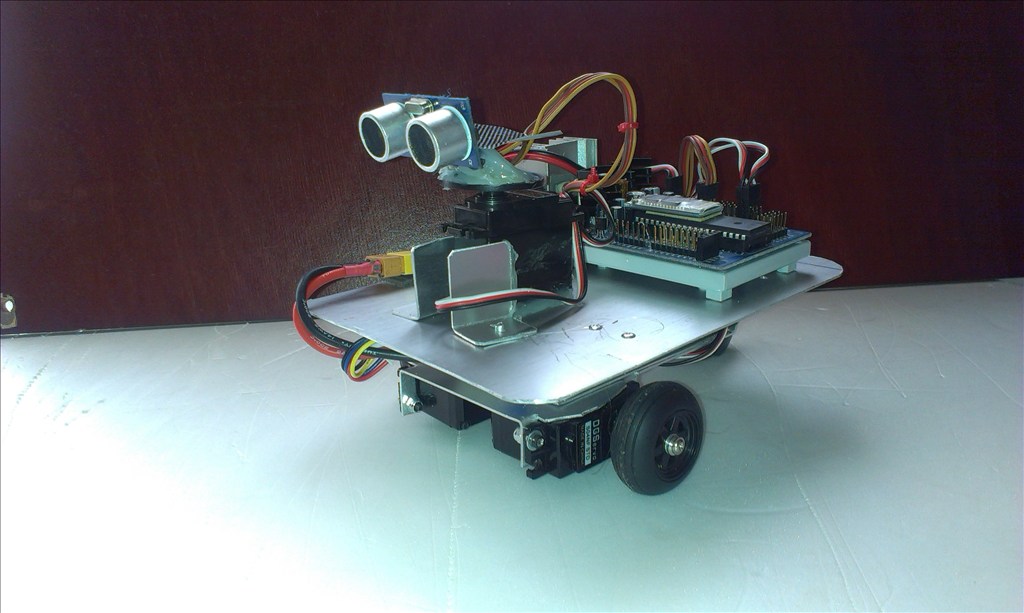
This is my new pocket robot: Navigator. Constructed from aluminum, cut with scissors, and assembled with rivets. Powered by a 11.1 v lipo battery, 1600mah passing through a regulator 8v (good voltage without fan) to feed ez-b. All heatsinks remain warm and has a great autonomy in the current configuration. My purpose is to experience in navigation with only the essentials, and start with a ping sensor and squeeze the most of what can be achieved. The second phase incorporates collision sensors with switches on the side of the robot and delanera. Then I would like to taste the lateral measurement with a ping sensor on each side of the robot (these would be fixed) and thereby expand the project in a modular, finishing with a camera on an upper floor, compass, etc. ..


Discover more robots

Andy's Lilian Is Assembled And Running
Ezang's Photoresistor Project With ARC, Arduino, Python...


Cool little bot
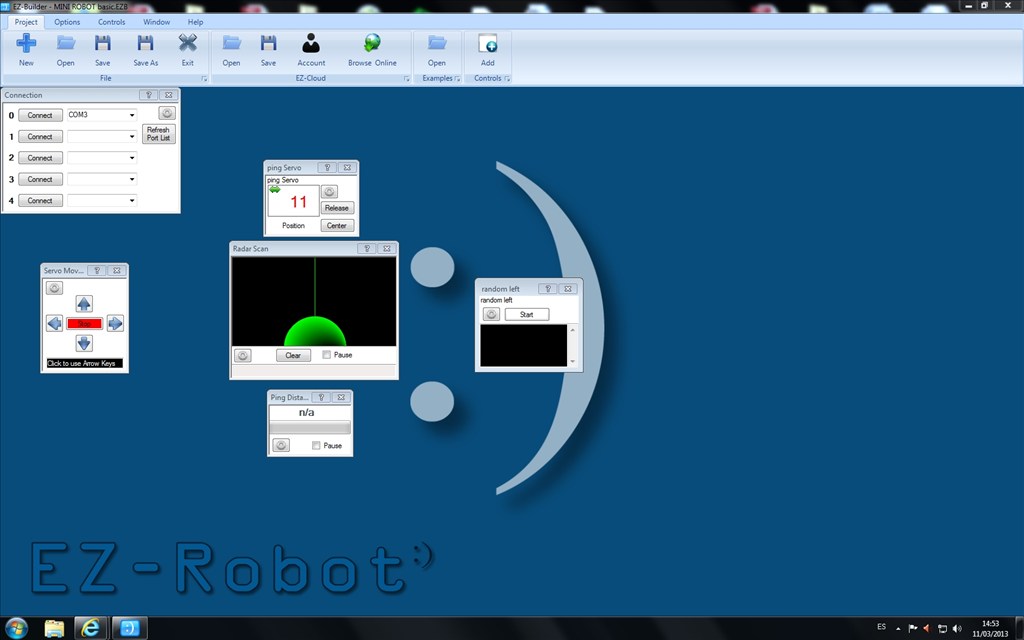
In this wonderful pastime can be used almost all, this is the first chapter, is also in the cloud:MinirobotNAV.EZB
Cool robot!
Could you take a video and post it. We really like videos - Josh
- Josh
As always, you're amazing R2D2 ! Nice robot. My Verop platform was intended to do the same thing. Basic navigation and developing algorythms. I hope to post some new pics soon of my EZ-B controlled lawnmower based on that platform. I'm waiting for my new kit (quite some time now)...
Very friendly Phg, I'm thinking about making videos Josh, in fact I would like to capture the video from the roof down to see the navigation in a room and then apply the quick-motion effect to video. I do not think it takes much to do, less than 10 years, haha??.
Yeah, tell me about it ! Time is what it's all about these days... Anyway, I'm looking forward to see your videos. Please hurry.... ;-)
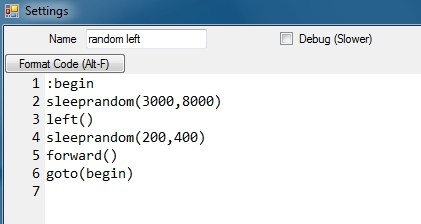
A combination of radar ping and a dash of random spins to the left, this combination has a tendency to approach the walls in your navigation. The script makes random sometimes enter into a silly robot is at loop when in a corner, making it take longer to get out of the corner, but sometimes acts as an intelligent refine the trajectory, some magic. The video speed is doubled: