




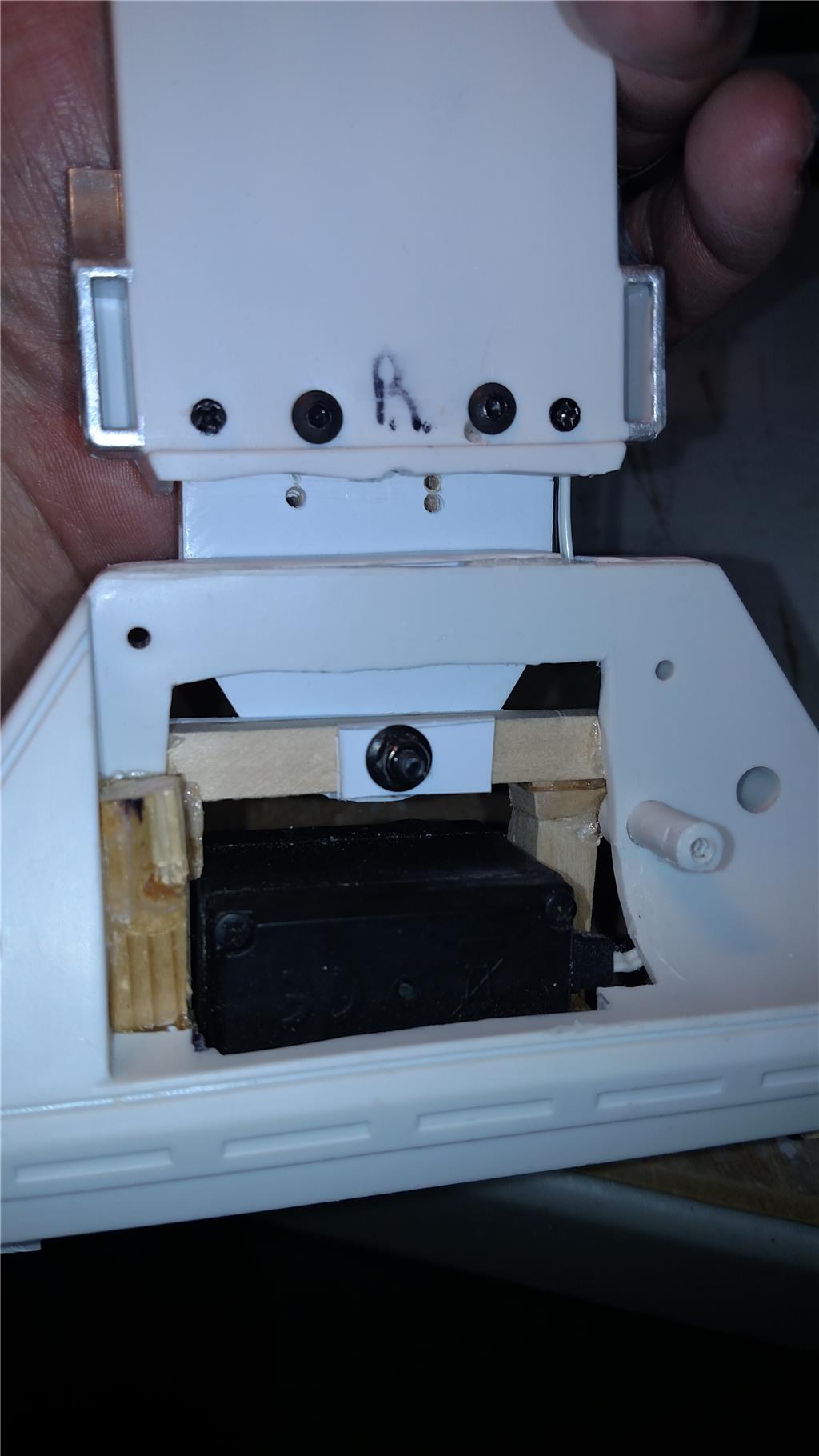

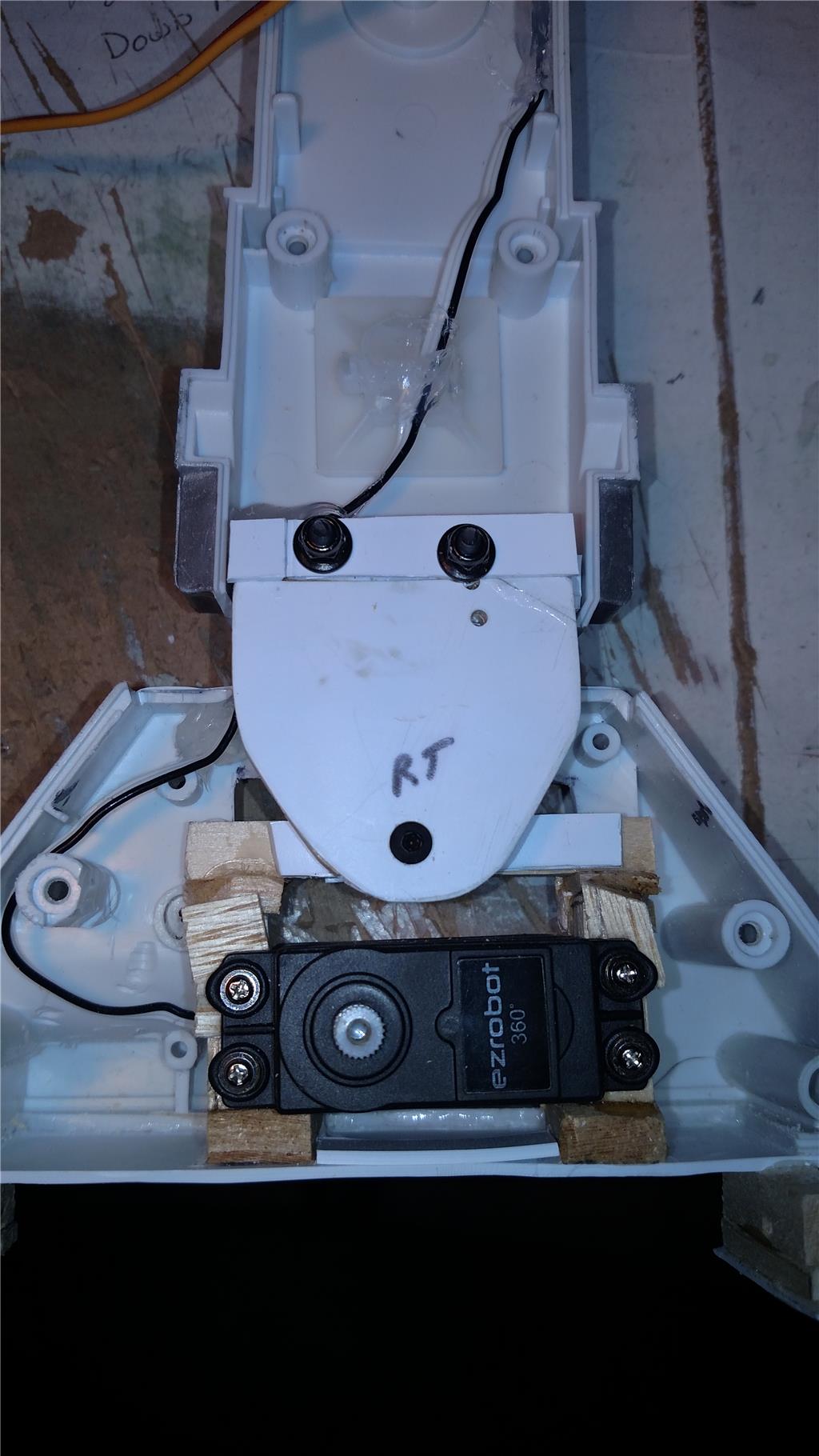







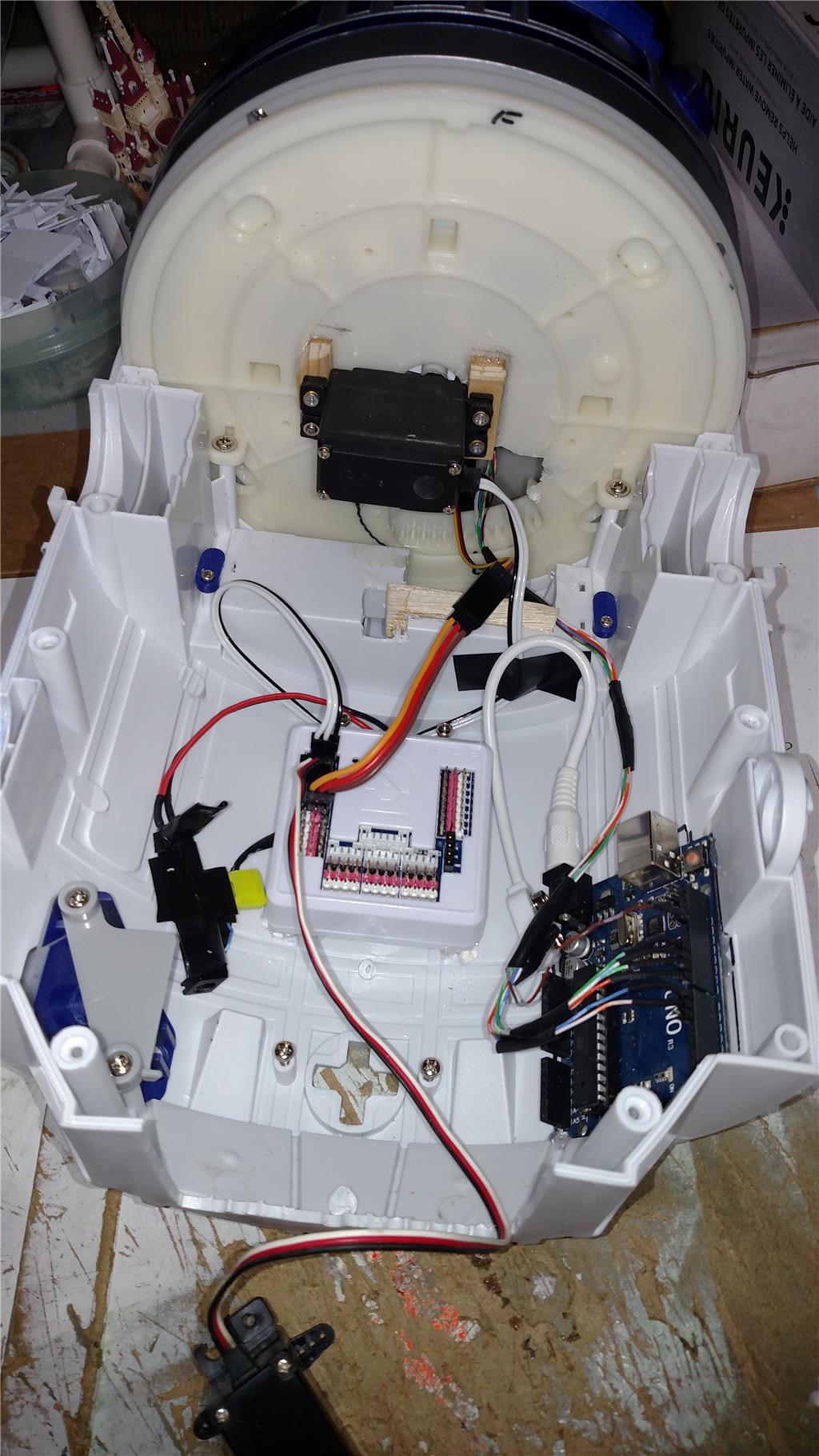

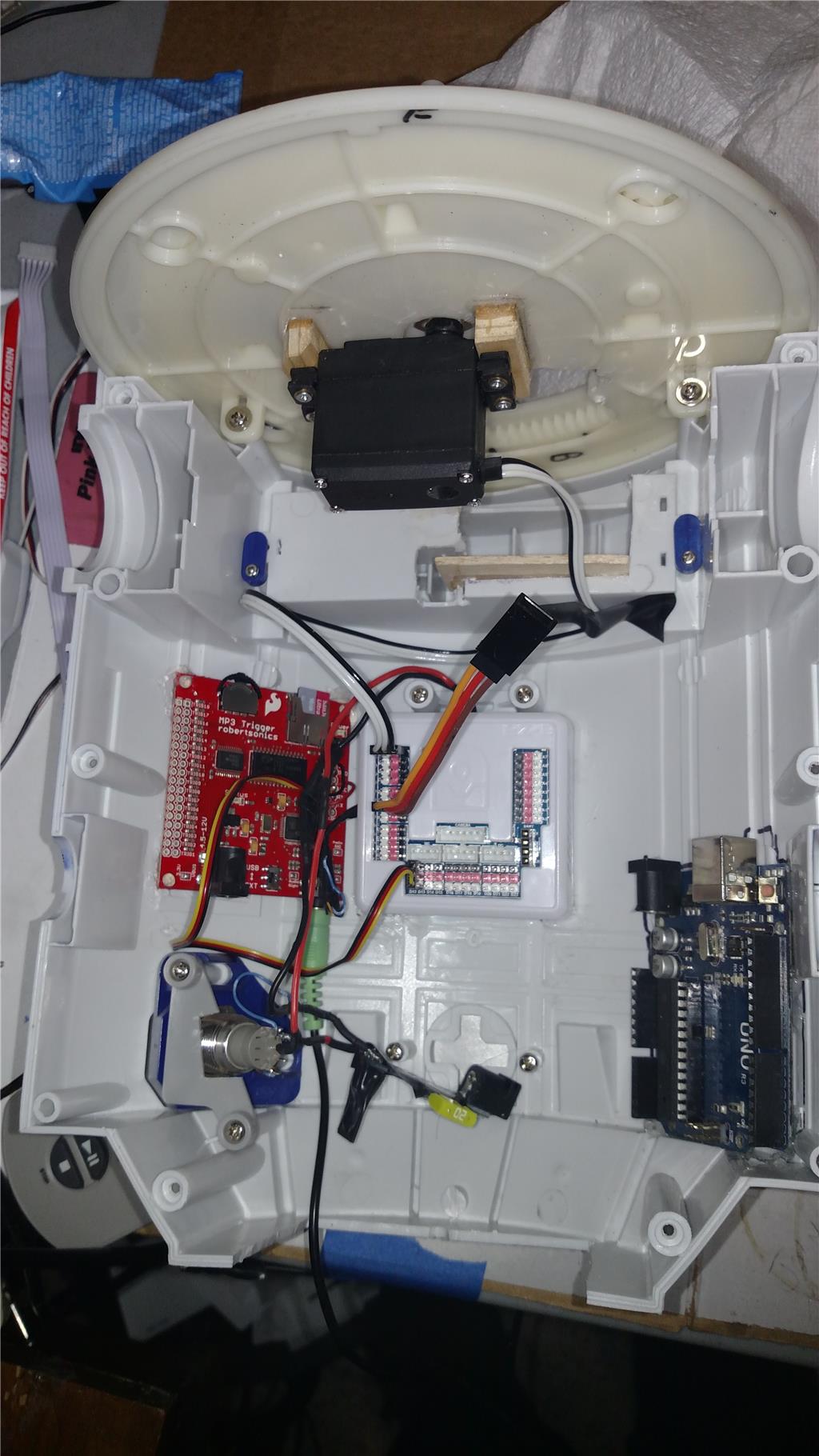

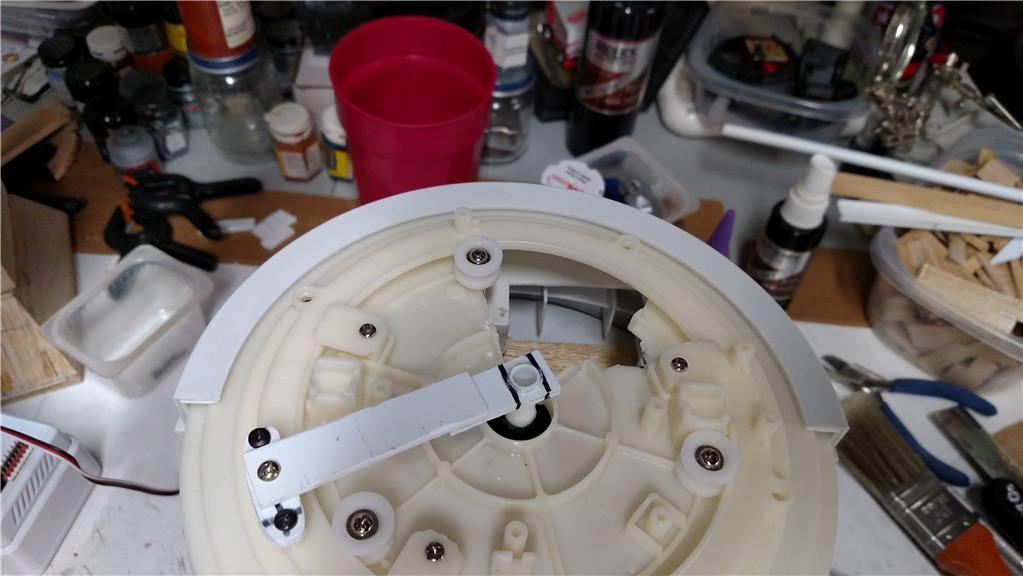
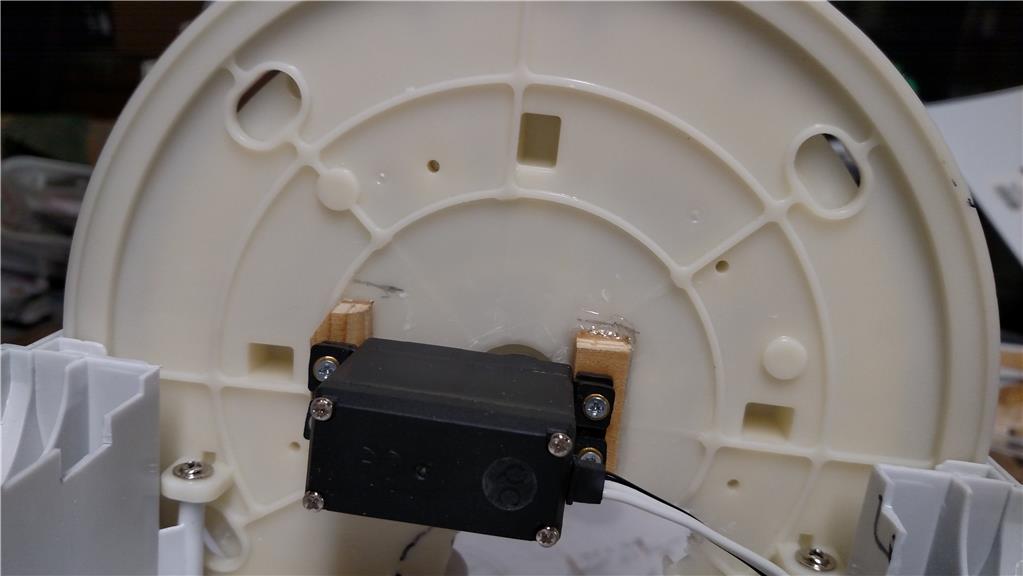

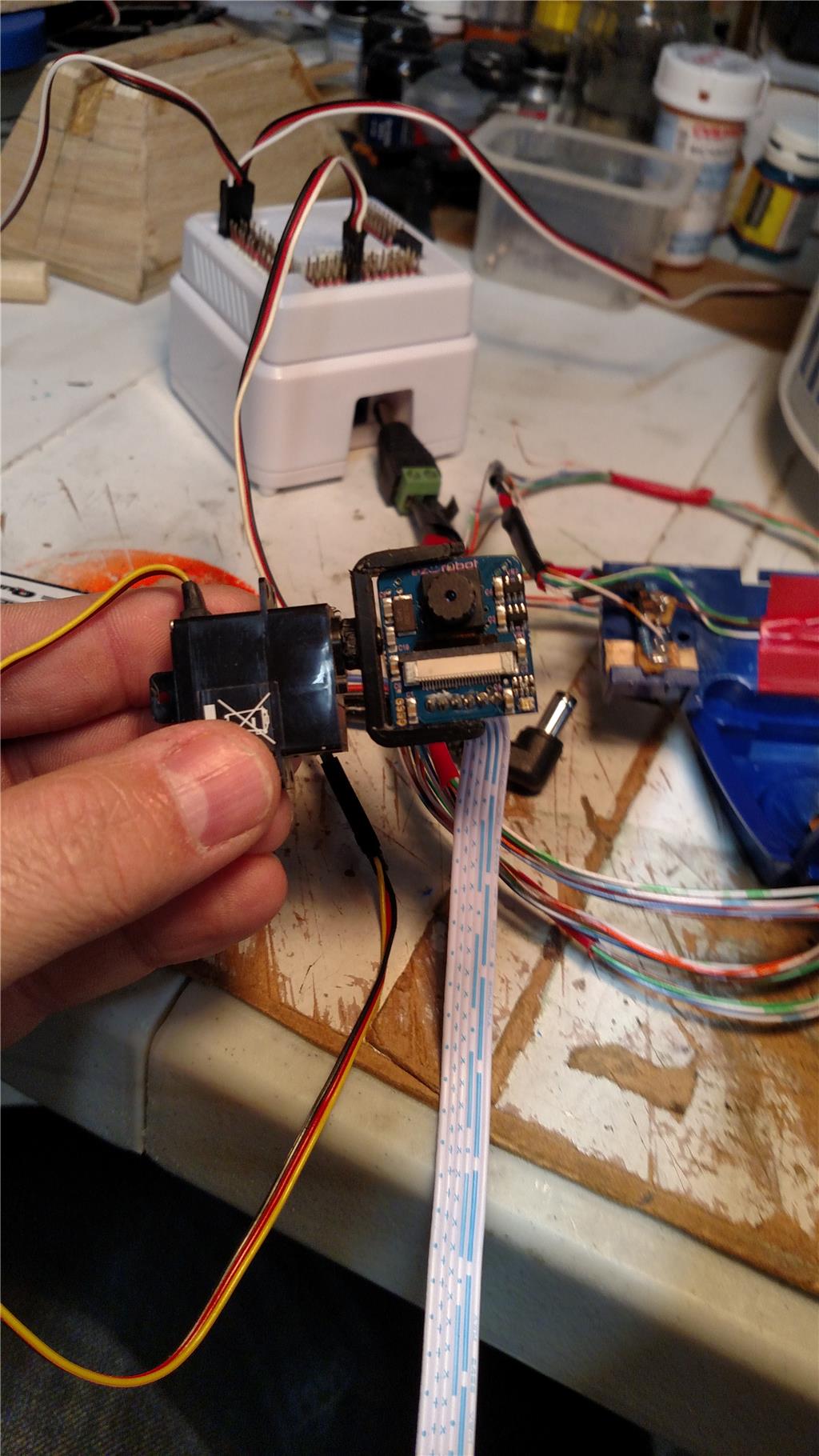

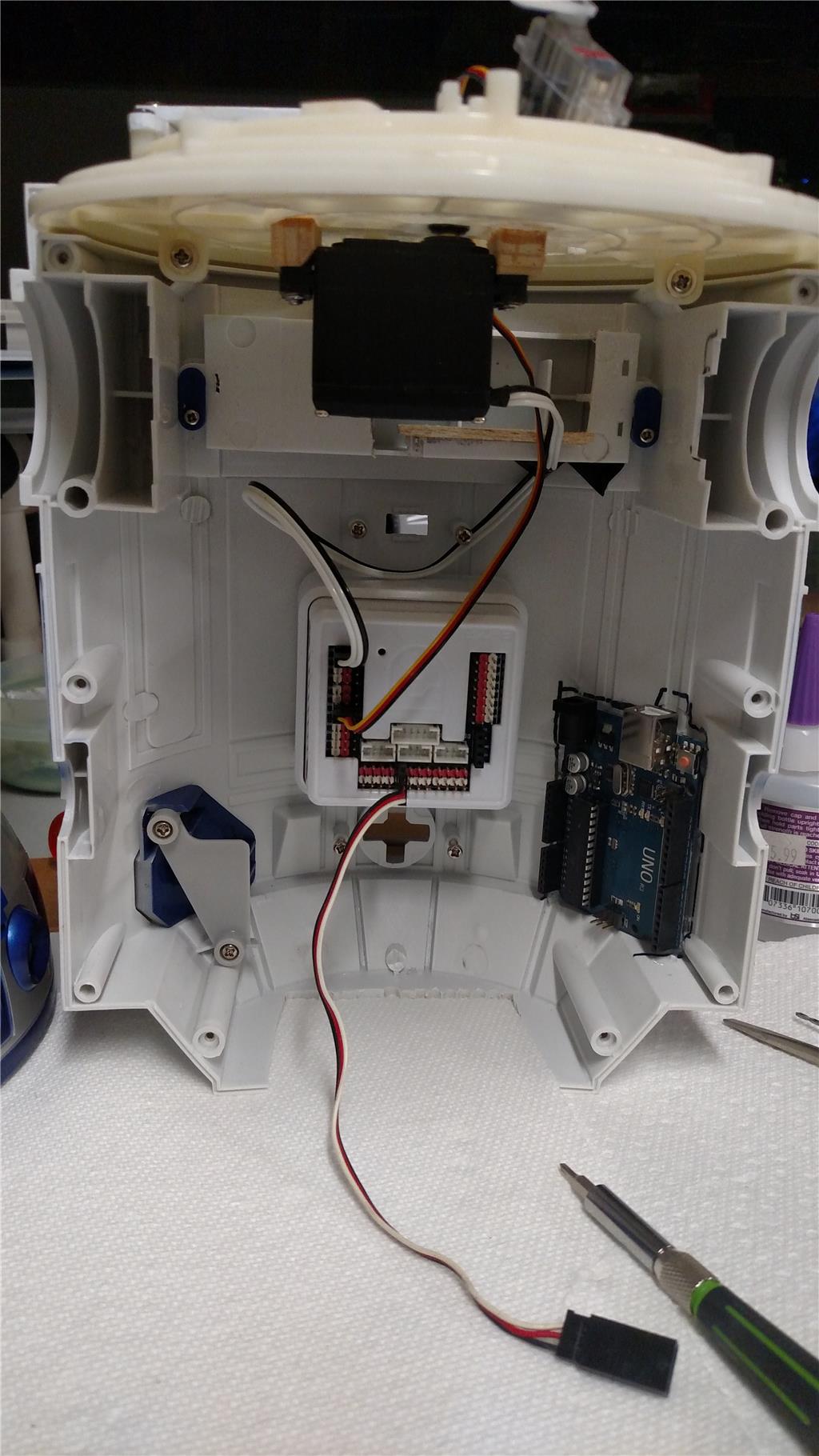



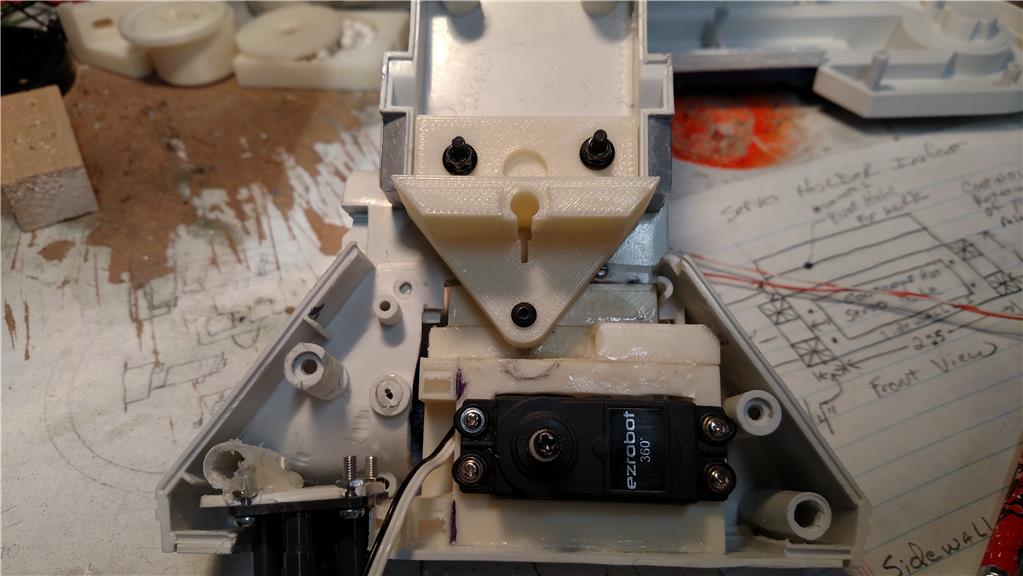






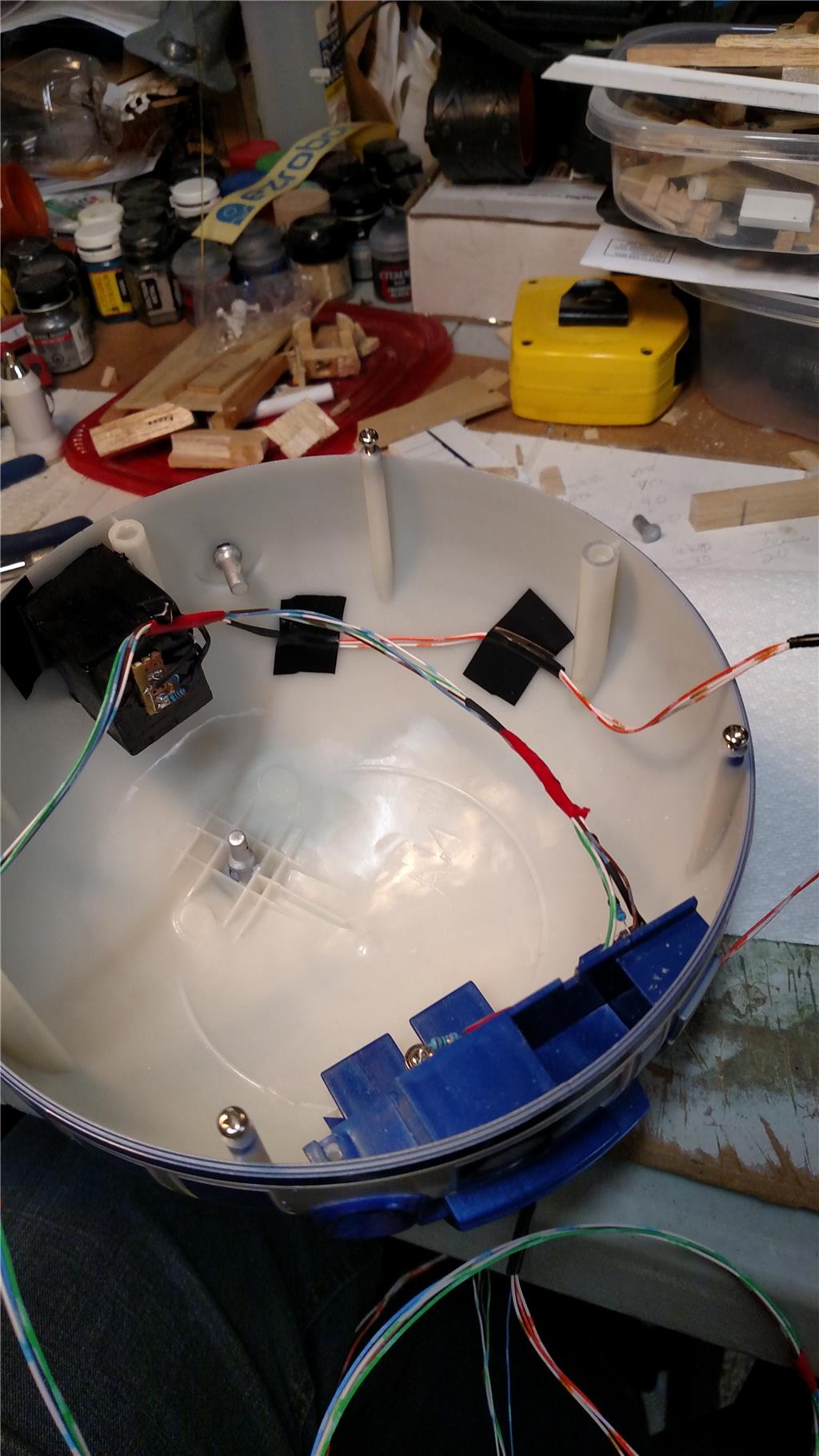
I am currently working on an 18 inch tall R2D2 that was purchased from Toys-R-US. This R2D2 had no electronics in it at all, just a pose able plastic model. It has a simple lazy susan type setup for the head movement. It has an upper gear and a lower plate. I put a EZ-Robot 360 degree (continuous) rotation servo in for the gear to rotate the head. The problem that I am having now is that the continuous rotation servo is difficult to stop at a give point, say 90 degrees. This faces my R2D2 head to the front. How would I control it like an Auto Position control, yet get the 360 degrees of movement out of it. with the Auto Position control I only get 180 degrees of movement. I am on a tight budget (unemployed) and am using what I have at my house for most everything I want to do with this R2 unit. The issue that I am having with the Auto Position is that once it hits the point it should stop, the servo keeps going until I hit the panic button to stop it. The stop button has no effect. Any idea's would be helpful. I have been programming with the EZ-Robot for about 4 months, but have programmed for 6 years with legacy software.
Regards, Richard
Discover more robots
Rb550f's Super Omnibot
Ezang's New Mr. Roman - Happy New Year 2020


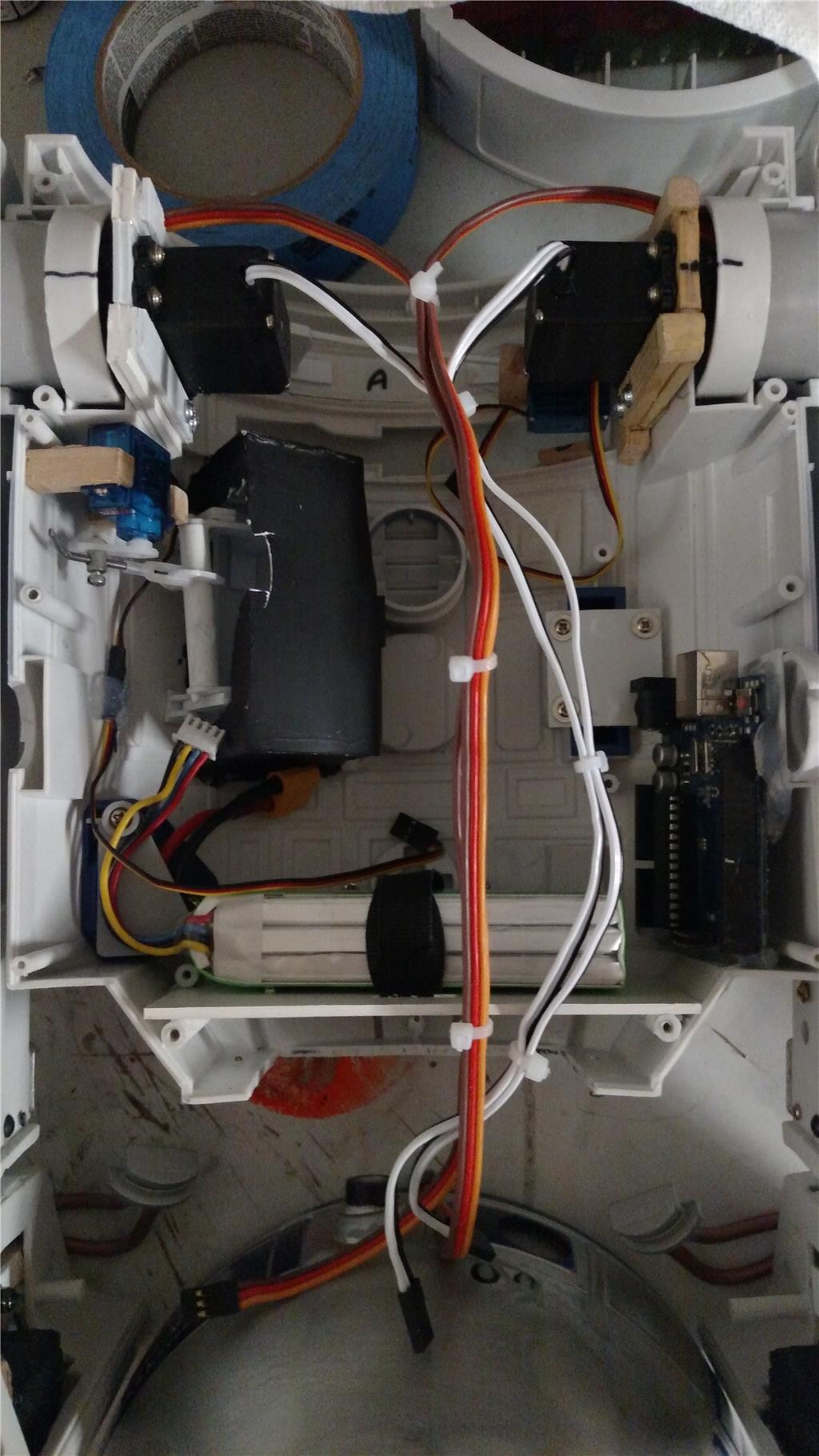
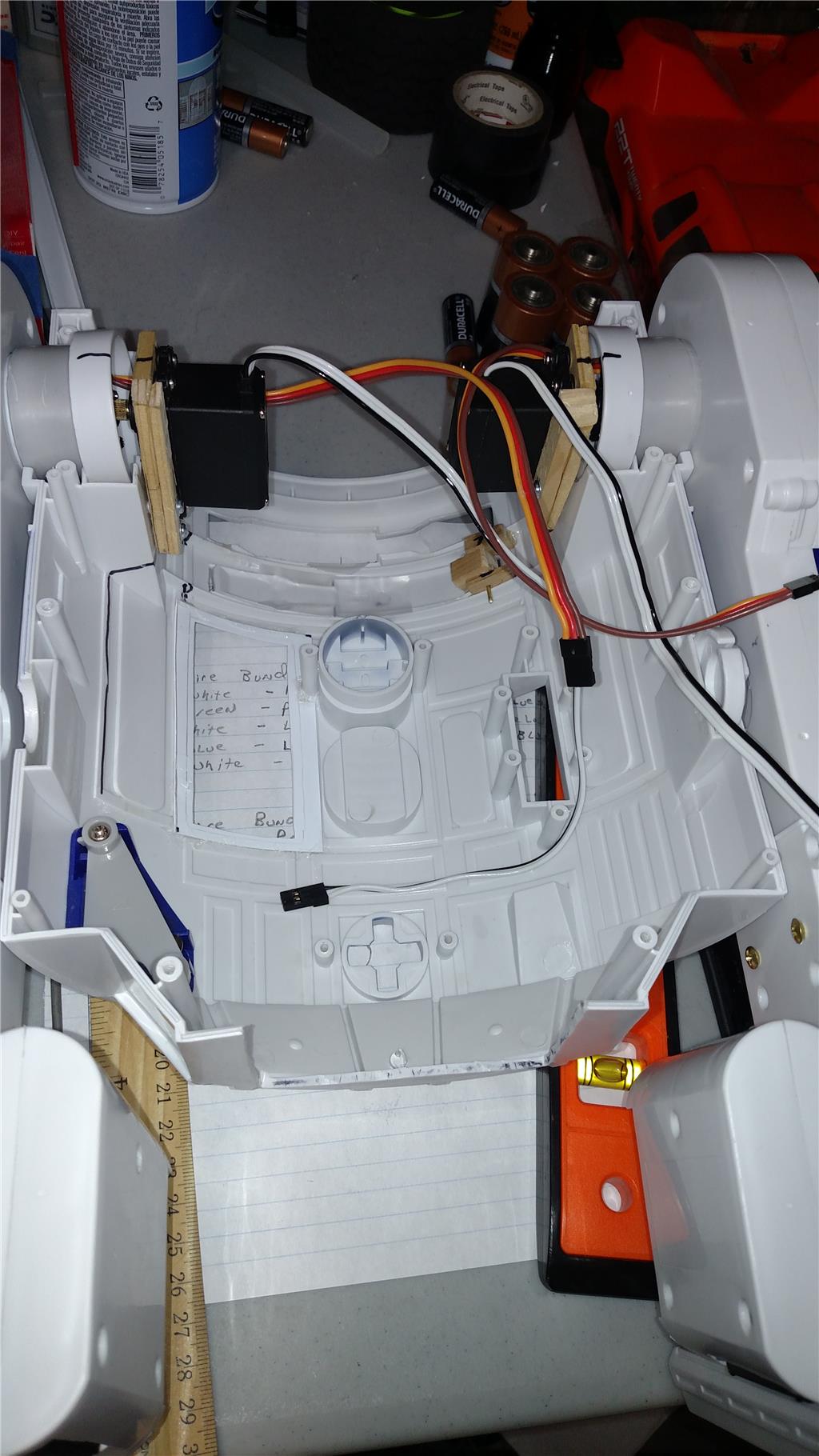
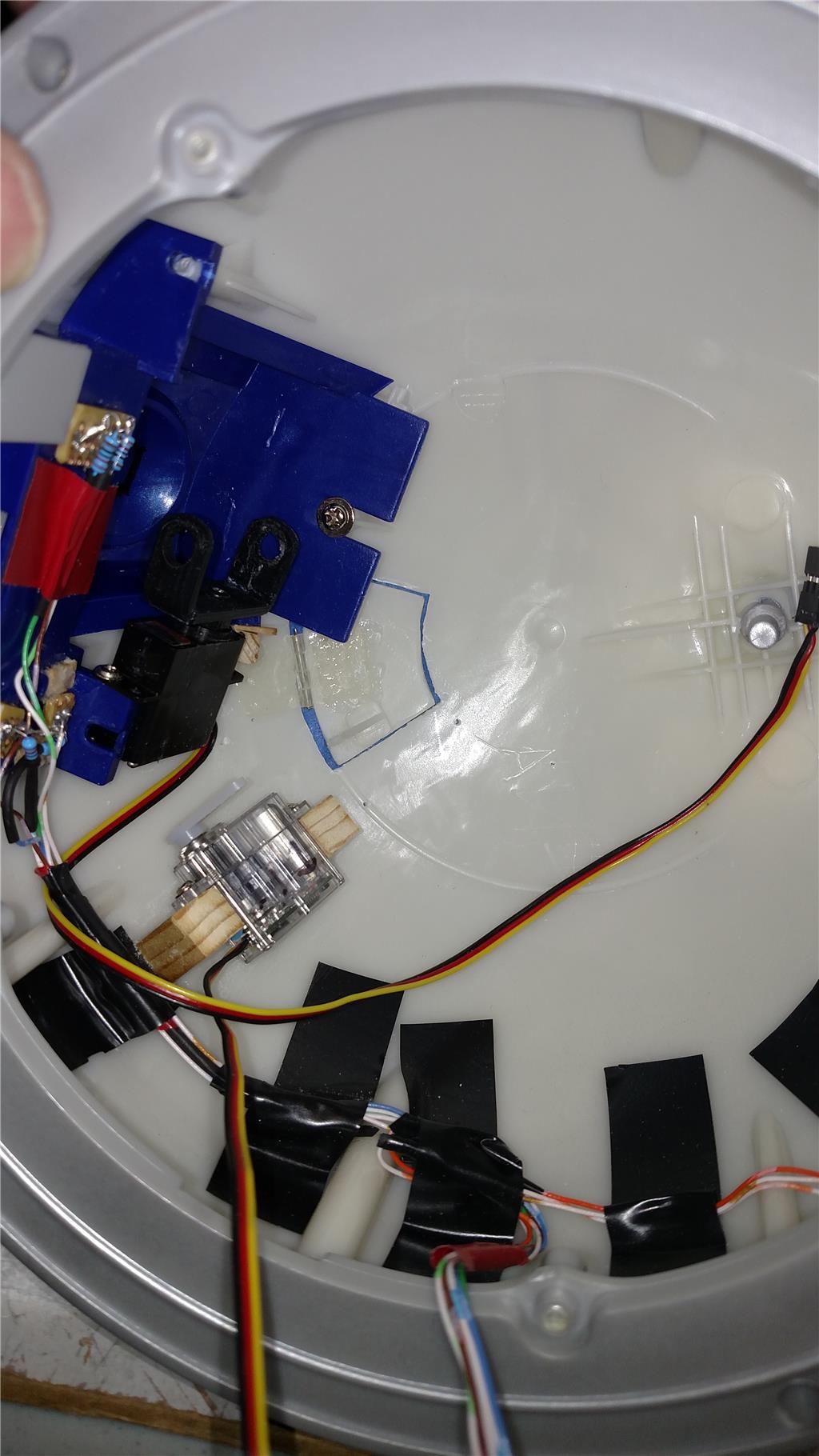
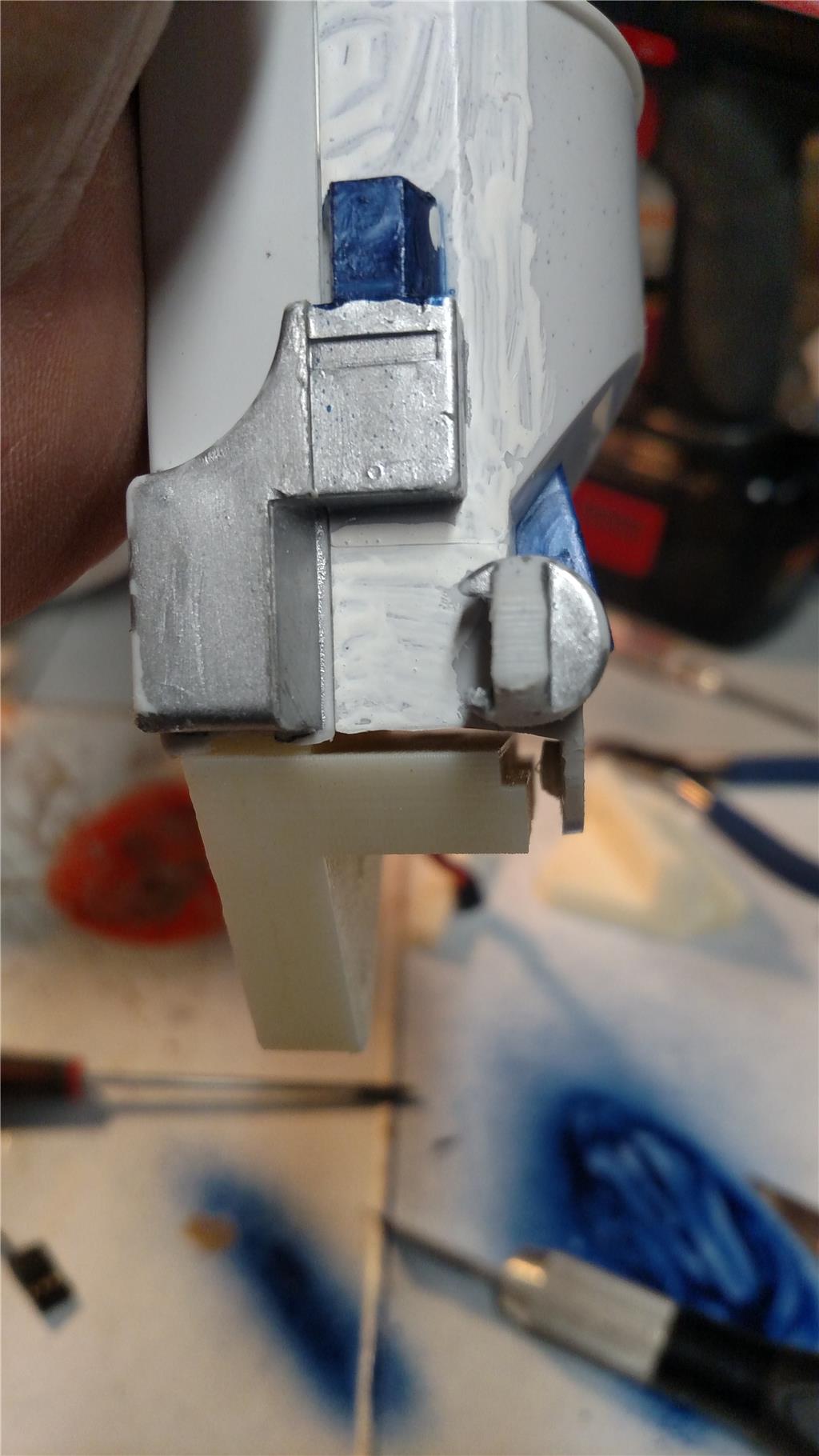
Update: 05-24-2018 The biggest problem I am having is getting R2 from 3 legged mode back to 2 legged mode. When I do that movement R2 will fall over either front or back wards. I have added some rods from the feet to the shoulder, that tilt the feet either front or backwards. However my original design didn't have a fixed point to "force" this movement to occur. Without forcing this movement to occur, the feet do not properly tilt. I am in the process of getting this worked out. Since I an using a 6 point servo are for the leg movement anyway, I am going to us that as my top fixed point for the feet movement. My legs rotate backwards on both sides, that means I can use the rotational movement to "force" the feet to the correct tilt for either a standing position or a walking position, in theory.
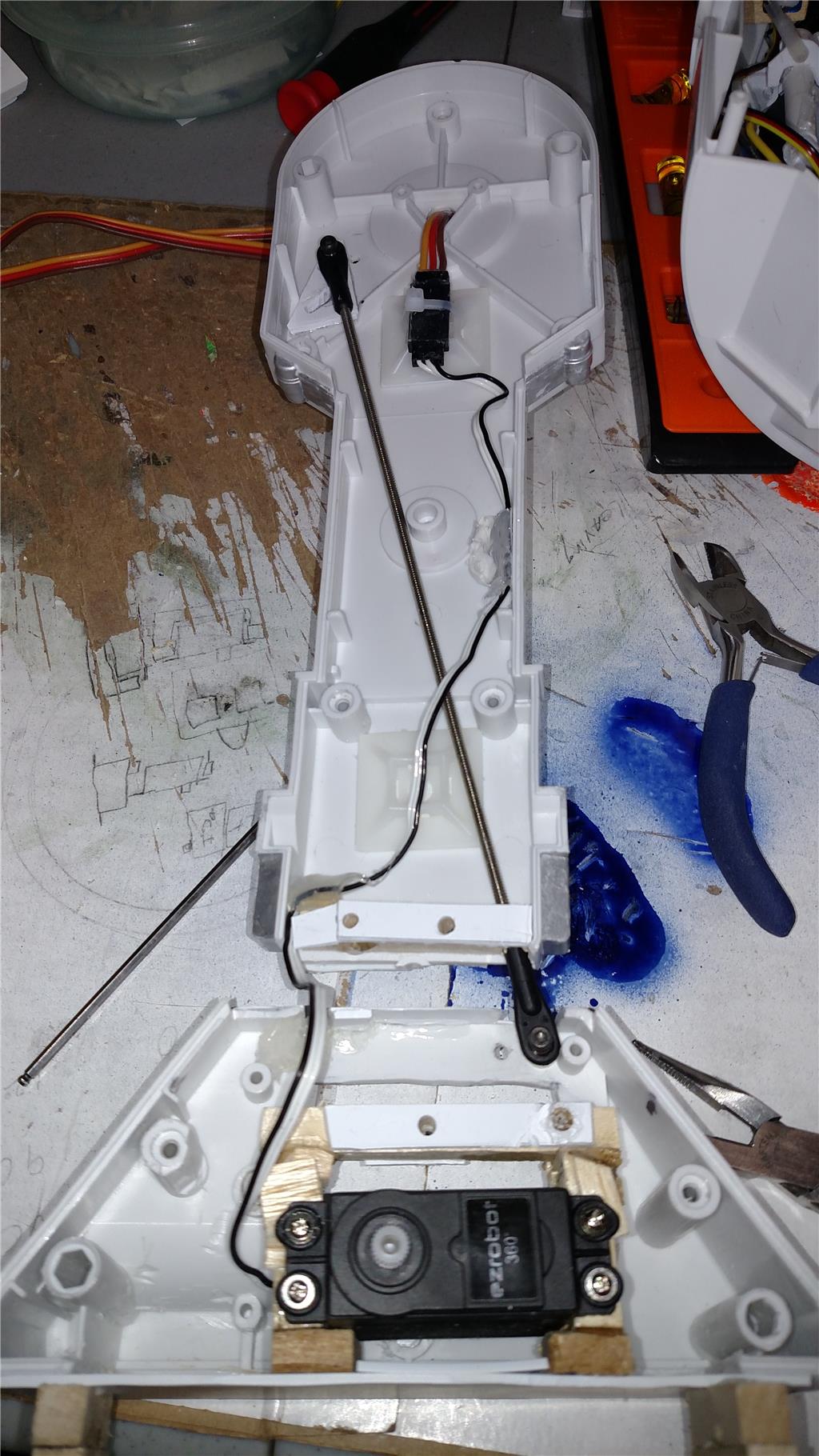
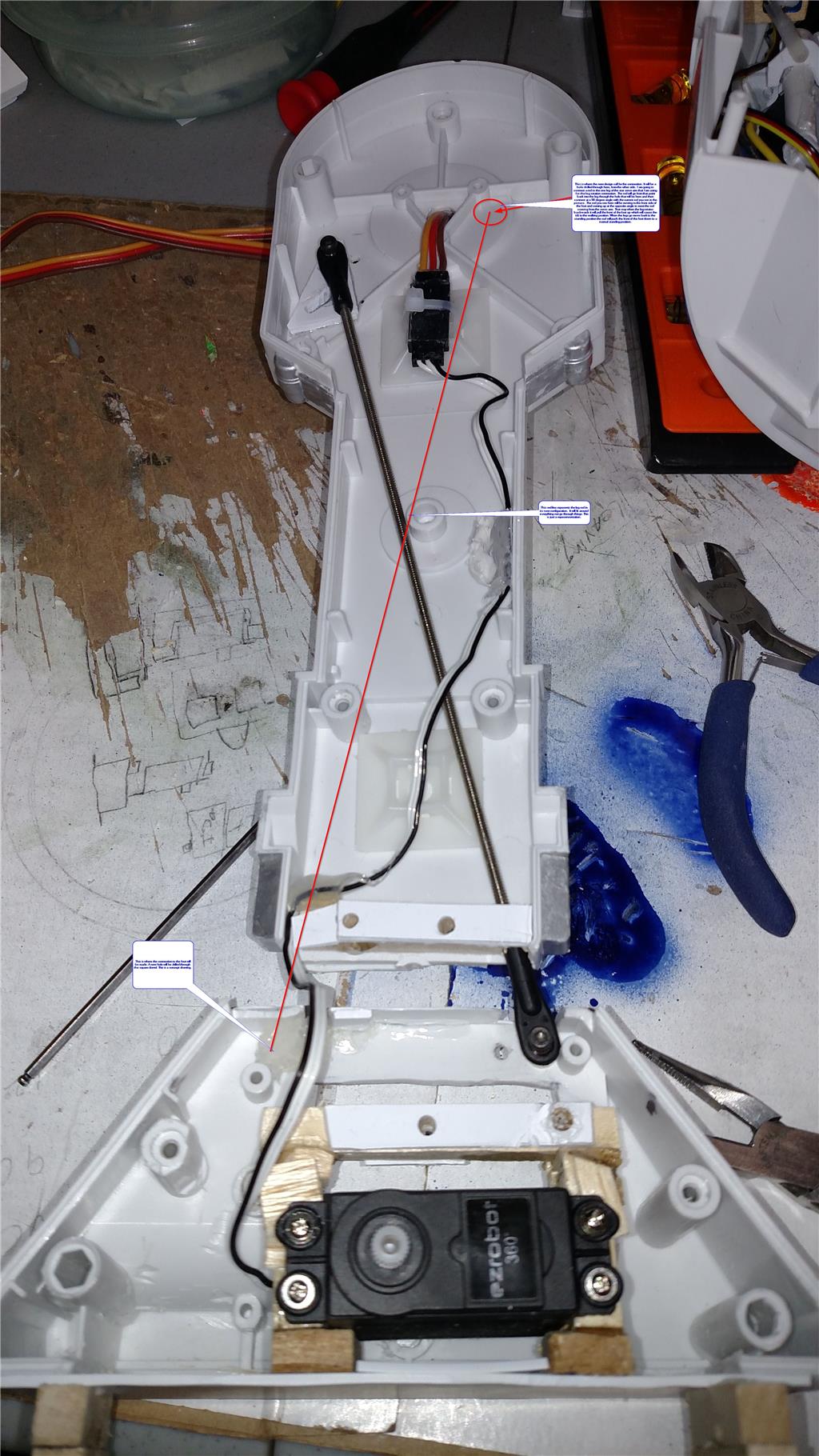
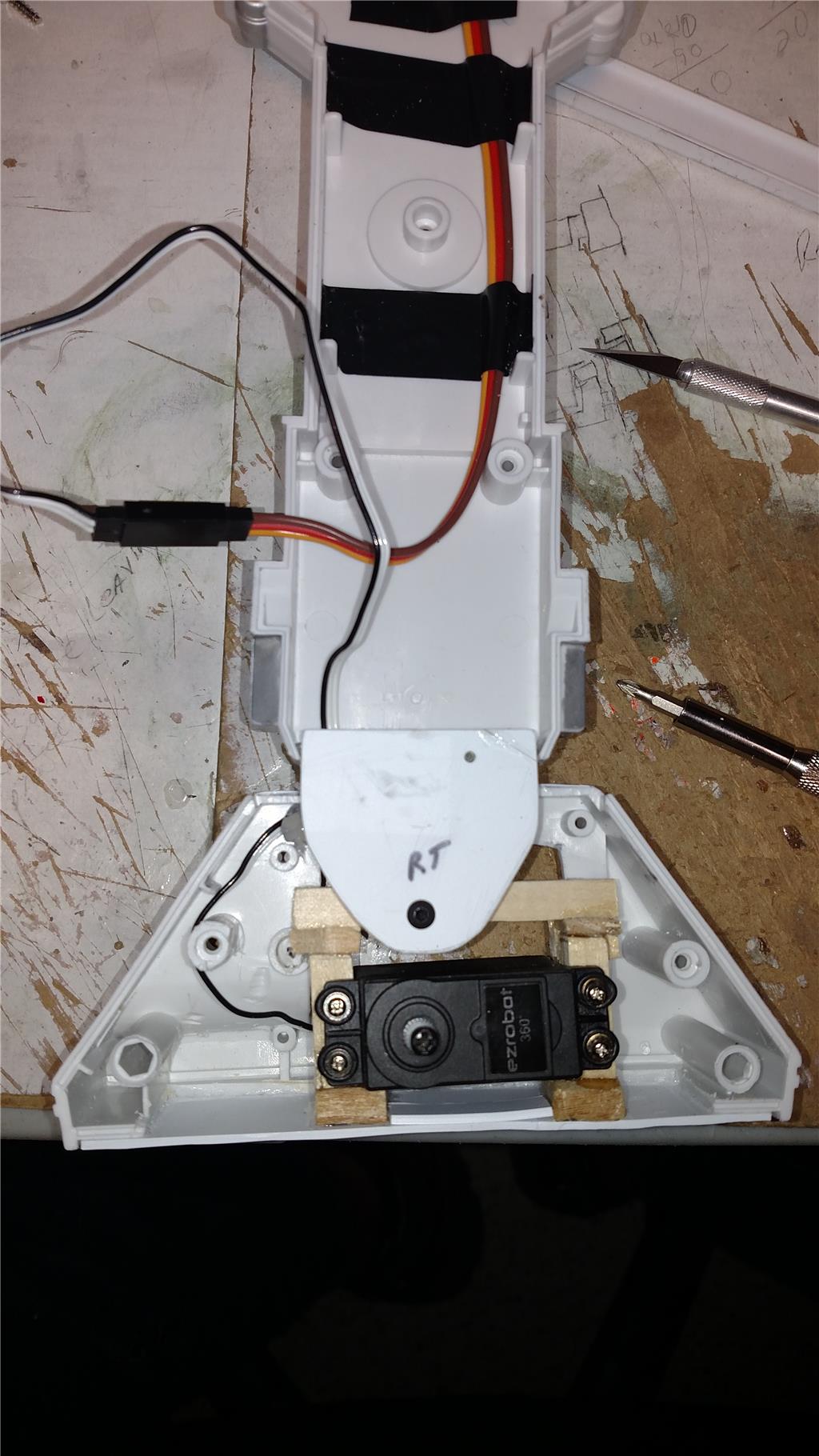
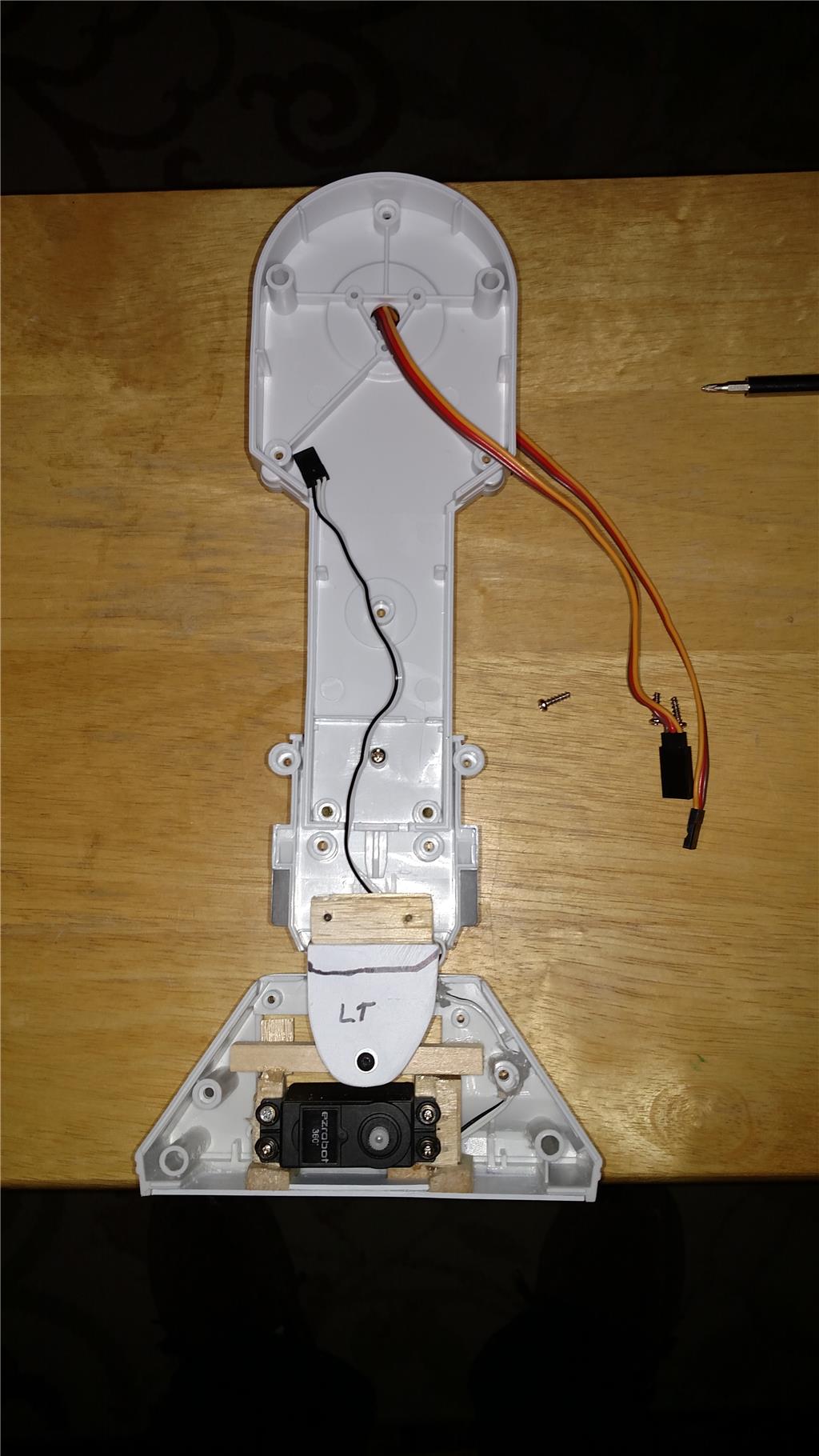
This first picture is my original design. The bottom of the rod is stationary and the top just slides up and down. That caused the foot to partially move in the proper direction. The second photo (marked up) is a concept photo of the new design. I hope this will resolve the issue. The guys that make the full size R2's sometimes use these rod. That is where I got the idea from, Astromech.com. There is also a midwest R2D2 builders club.
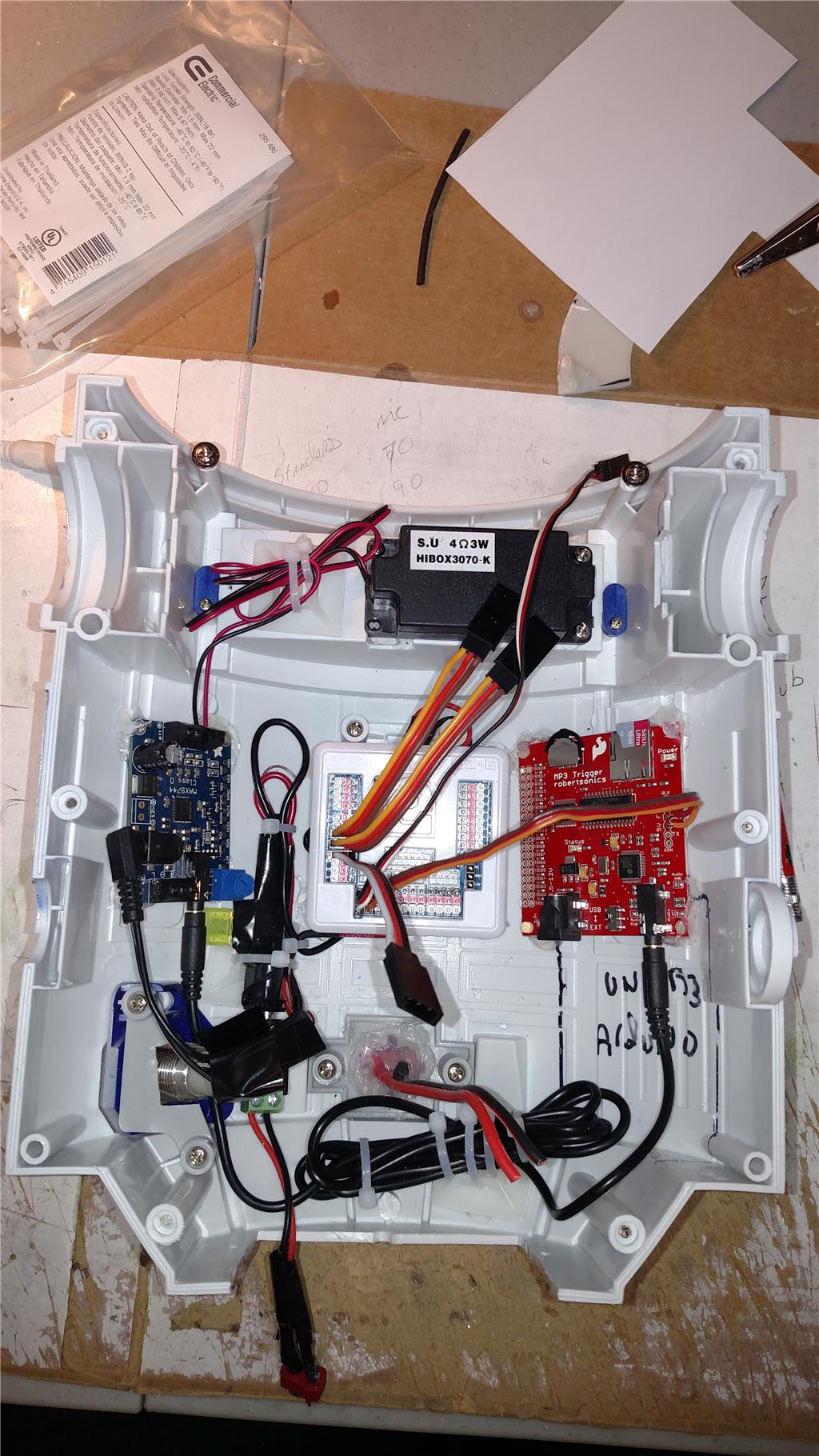
Another batch of electronics will be here on Tuesday 5/29/2018. This batch will provide me with the 3W LEDs that I am using for the holo emitters and a 5 volt board that will run my 3 ultra sonic range finders, and the PIR sensor for motion detection during sleep mode. The range finders are for the autonomous mode. I have to start on that programming soon. Since my Arduino controls the LEDs in the dome, I will be interfacing the 2 controllers and stopping the lights program on the arduino to simulate sleep mode. That's it for now
I was searching the internet looking for better ways to do things, when I can across this Thingiverse post about a rotating shoulder for the 18" R2D2.
Jakks Pacific 18" R2-D2 Mods
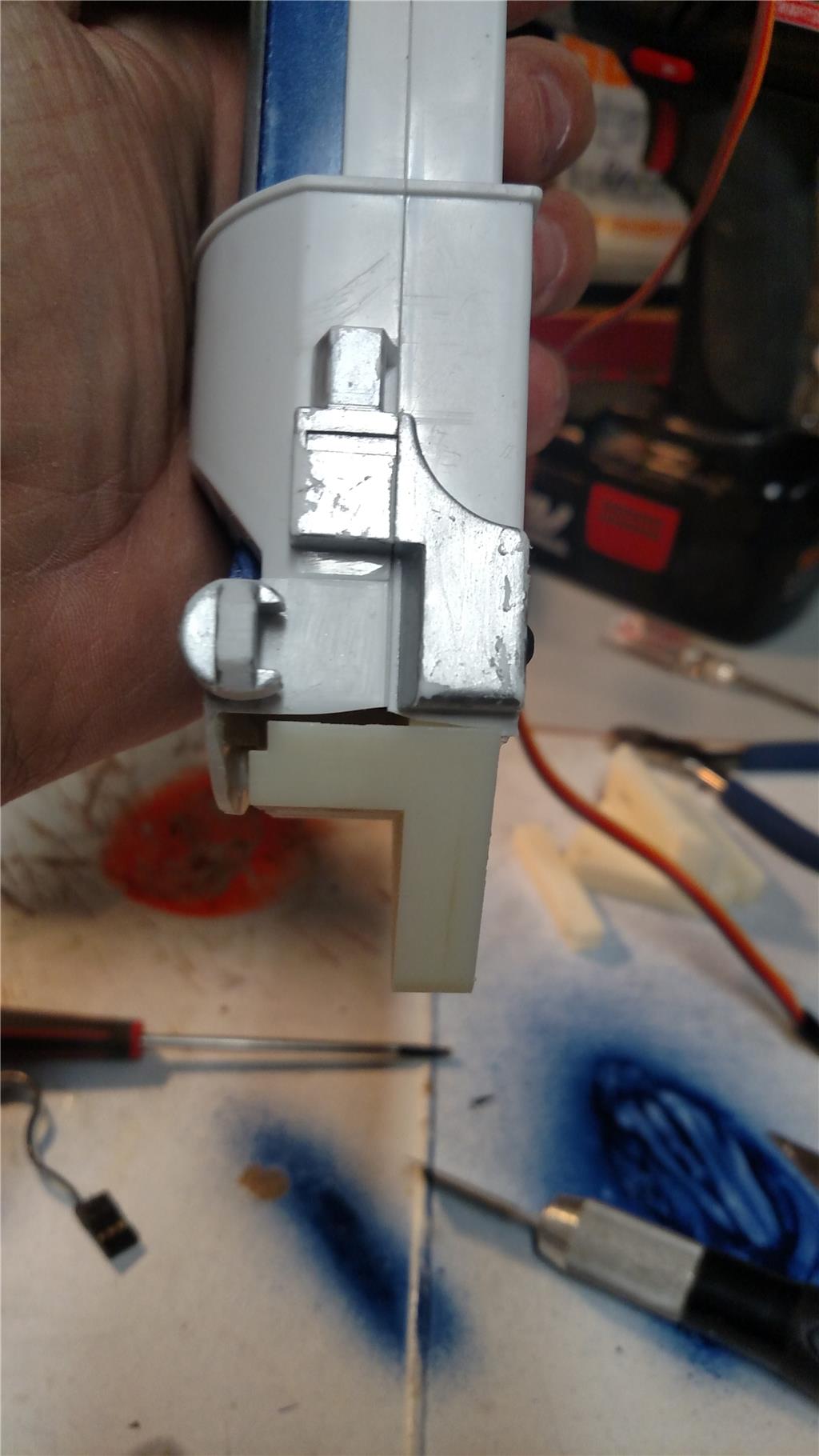
This @outcastrc had come up with a design to allow the legs to pivot from 0 to 36 degrees. Within the same post he has some ankle for R2D2, so that you can remove the feet from the legs like I did and then insert these ankles. I am having the ankles printed as we speak. They will be completed tomorrow. I want to check the quality from the place that I am having them printed which is why I did just the ankles. I also found out that this 18 inch tall R2D2 is a very close 40% scale of the full size R2D2. This discover alone will allow me to 3D print from any of the plans that I have found at 40% full size. This will allow me to add a number of neat items to my R2 to help his realism.
Is 2 legged mode just for standing or do you plan to have him move also? If it is just for standing, I would retract the foot servos in 2 leg mode. Easier said then done.
@rz90208 2 Legged mode would be just for standing at this time. There is no room to have the servo's retract so the wheels are completely inside. It sounds like a good idea, but just don't have the space. At some point in the future I might have him "bounce" around in 2 legged more.
Yes you are correct about the easier said than accomplished. I am having enough issues with his legs and balance. Going from 3 - 2 legged mode. Although I believe that once I get the new shoulder and ankle joints are added into R2 that problem should correct itself. Somewhat. One can only hope.
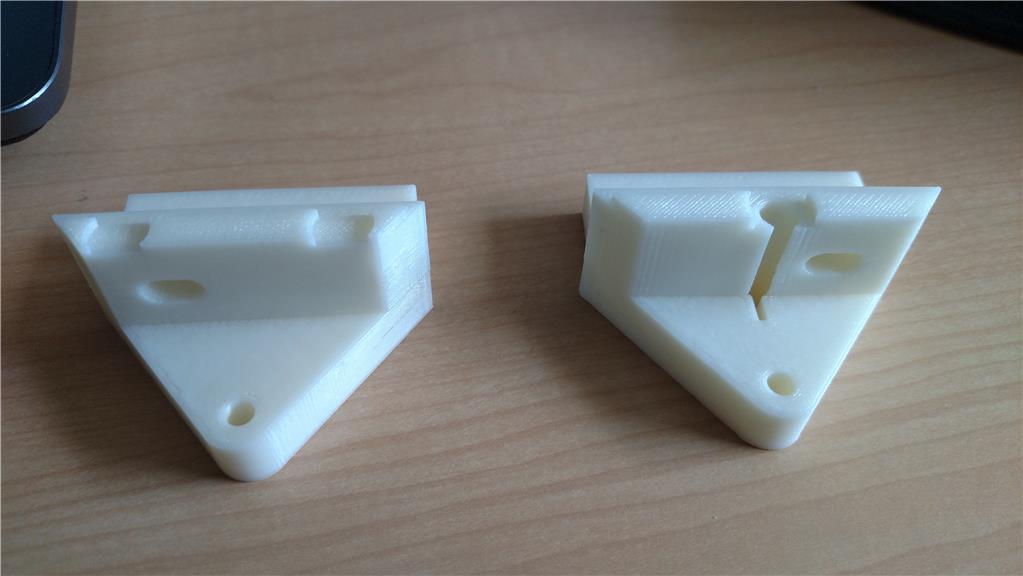
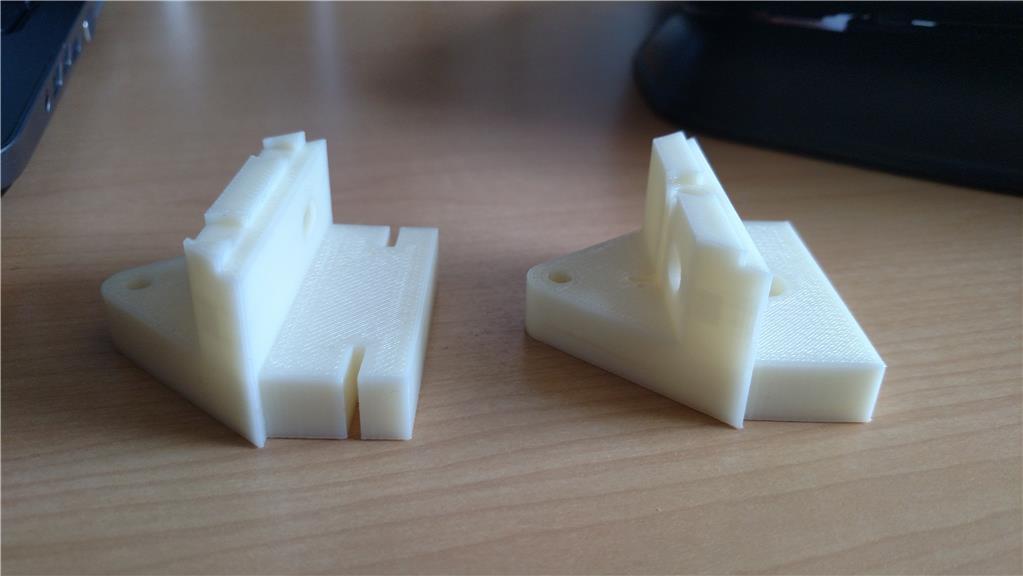
I picked up the new R2D2 ankles. They look great. I had them printer at the 3D print shop at the University of Michigan, I work here. Below are some pictures of the new ankles. I am going to get the shoulders printed next week and then put all the items into R2 at the same time. These should also help my feet not to pivot right to left.
I have this bot also and my solution was:
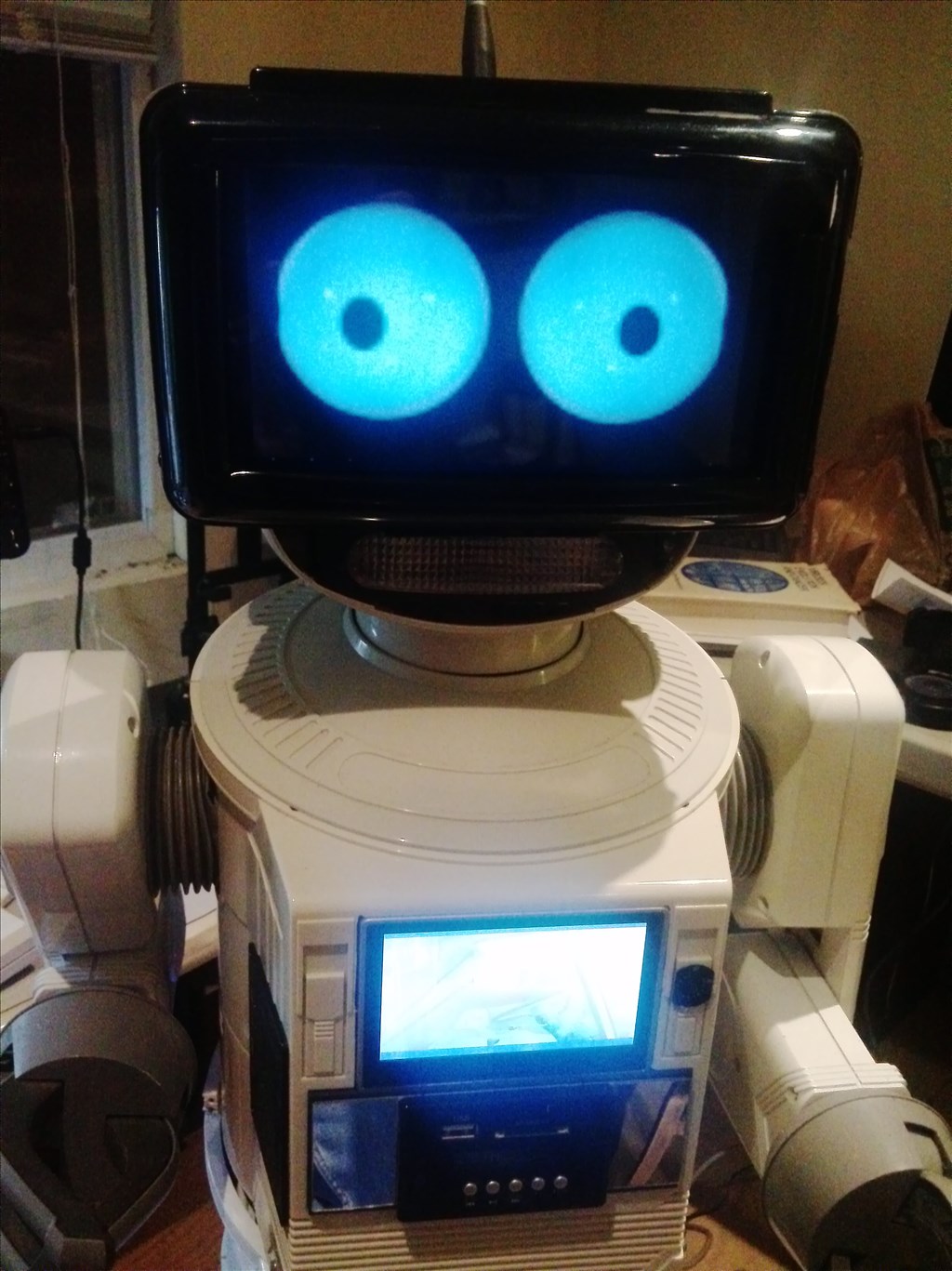
thats a cool robot R2-JD2
I like your bot ! Get the stability wasn't a problem for you @rz090208. I like the base that he is mounted on and the arm are sweet. I have been looking at that base to start building a WALL-e robot. However I need to get my R2 finished. I will have some additional videos up toward the end of this week.