




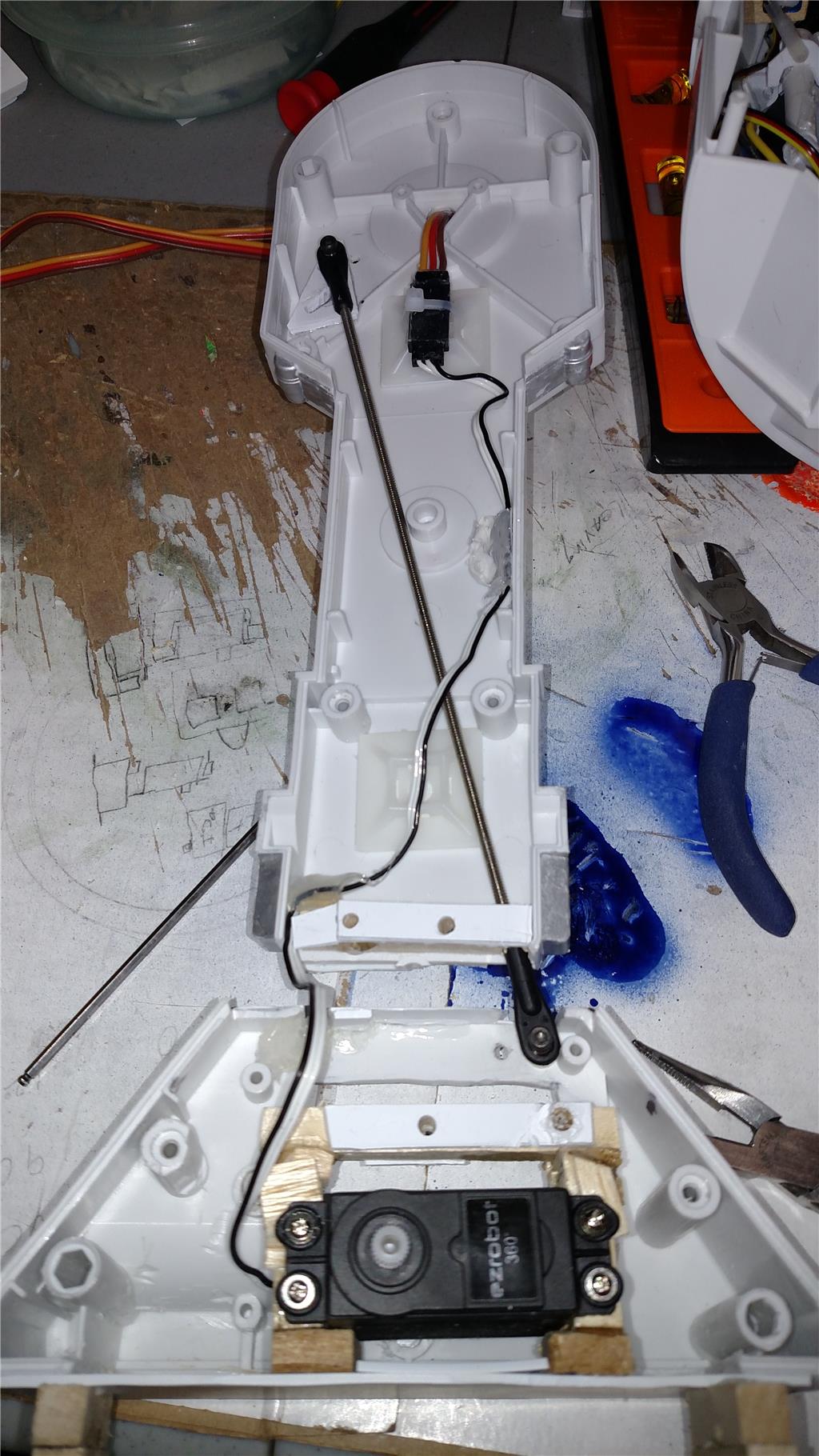
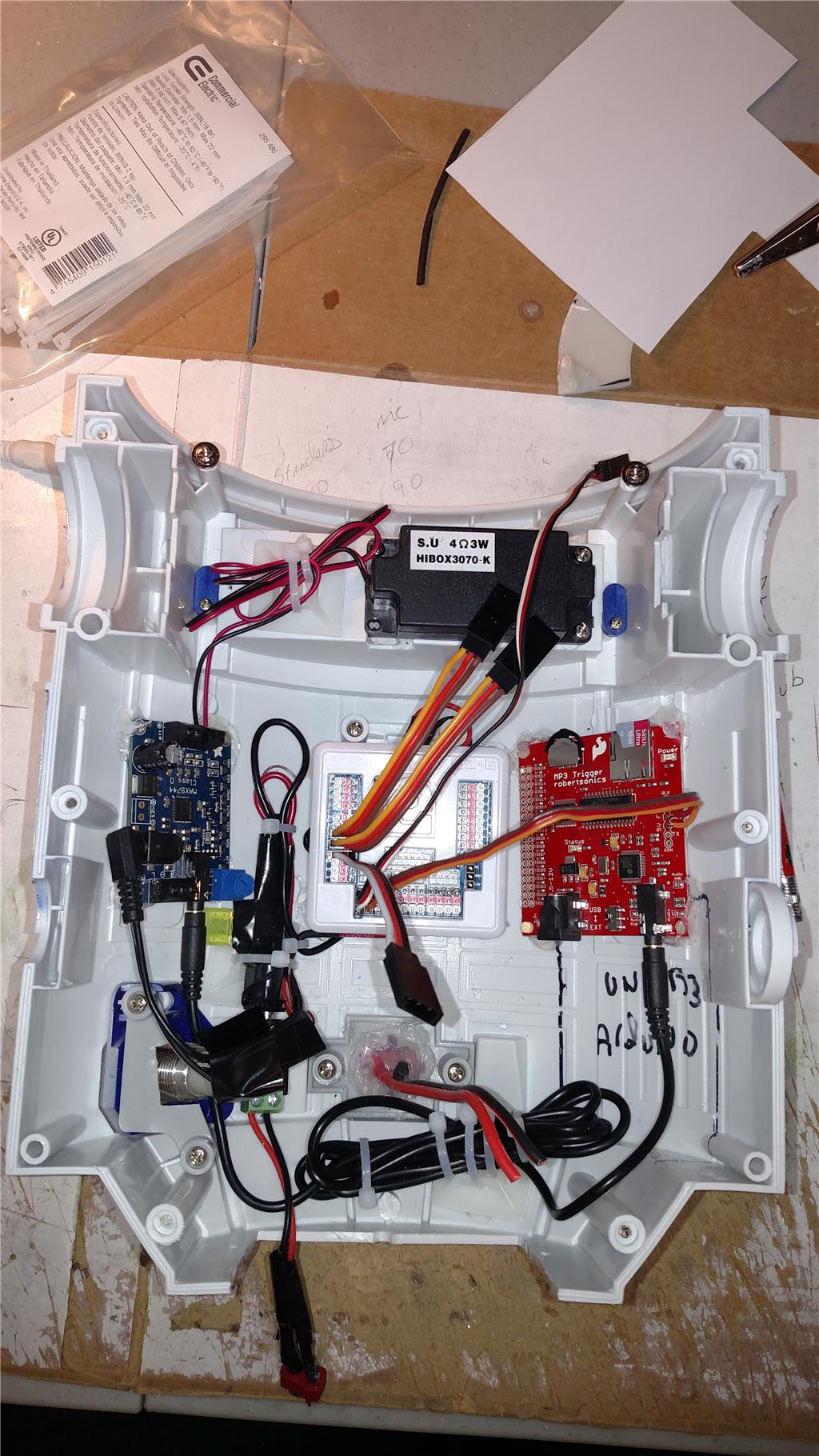
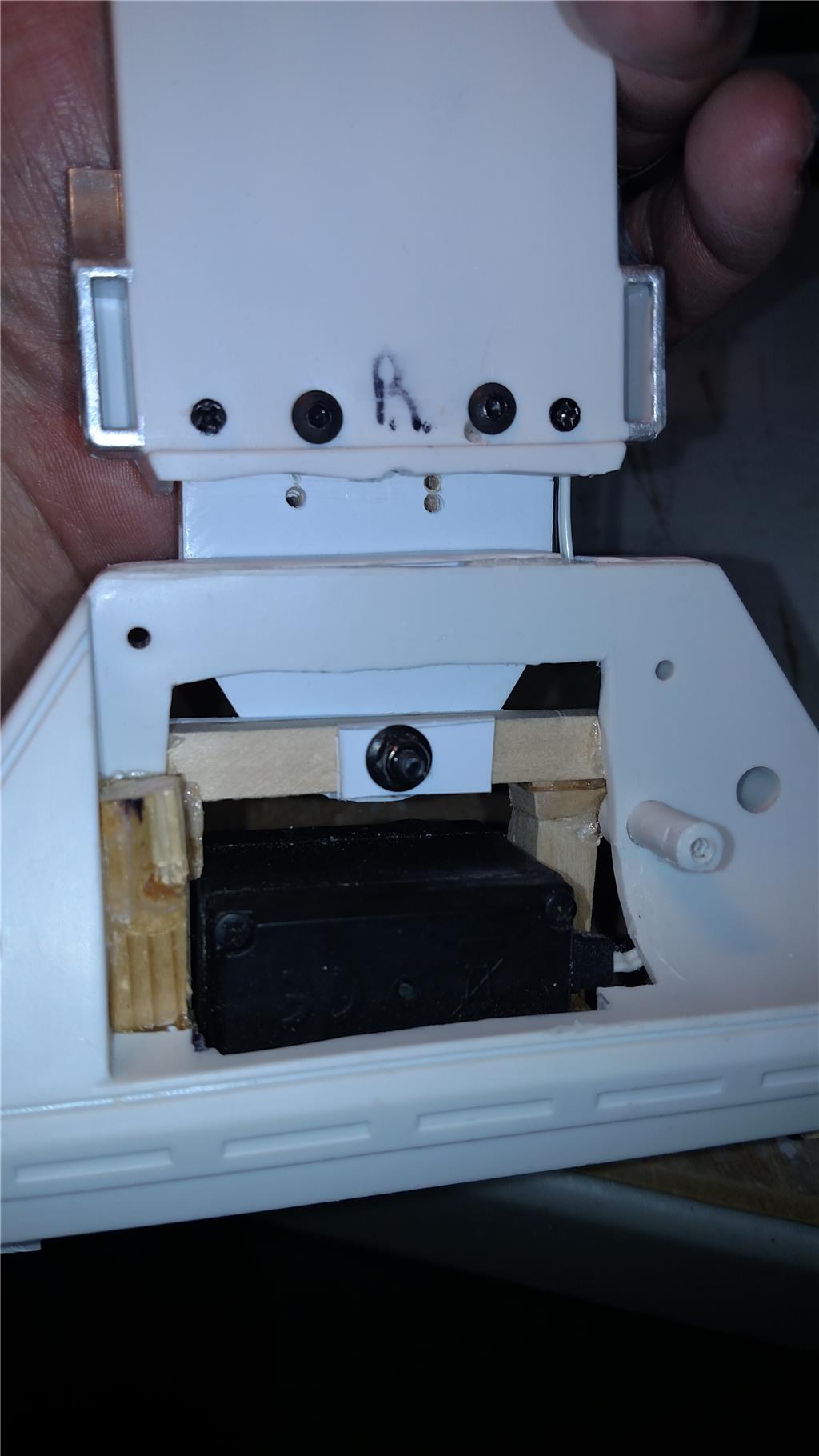

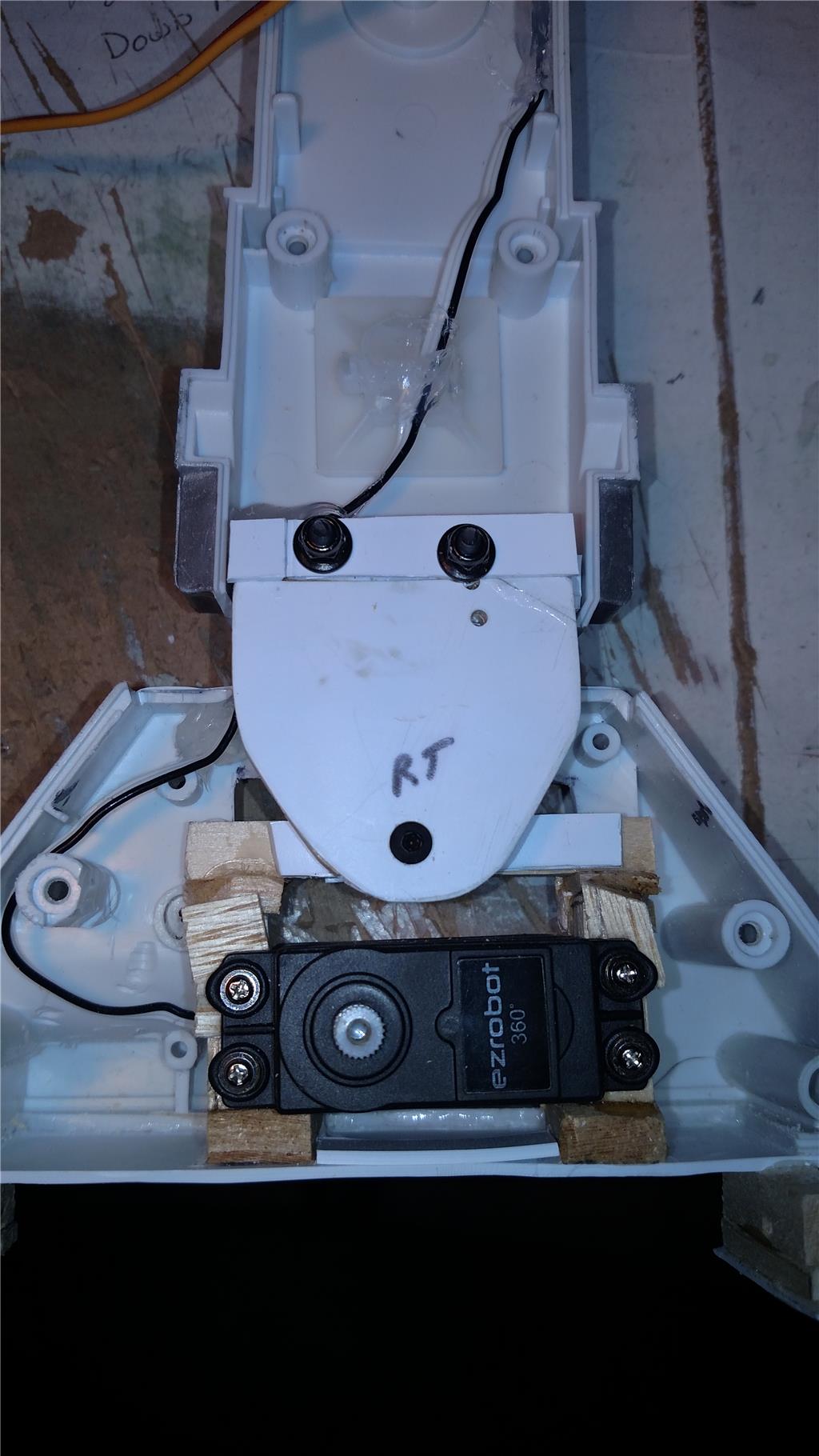



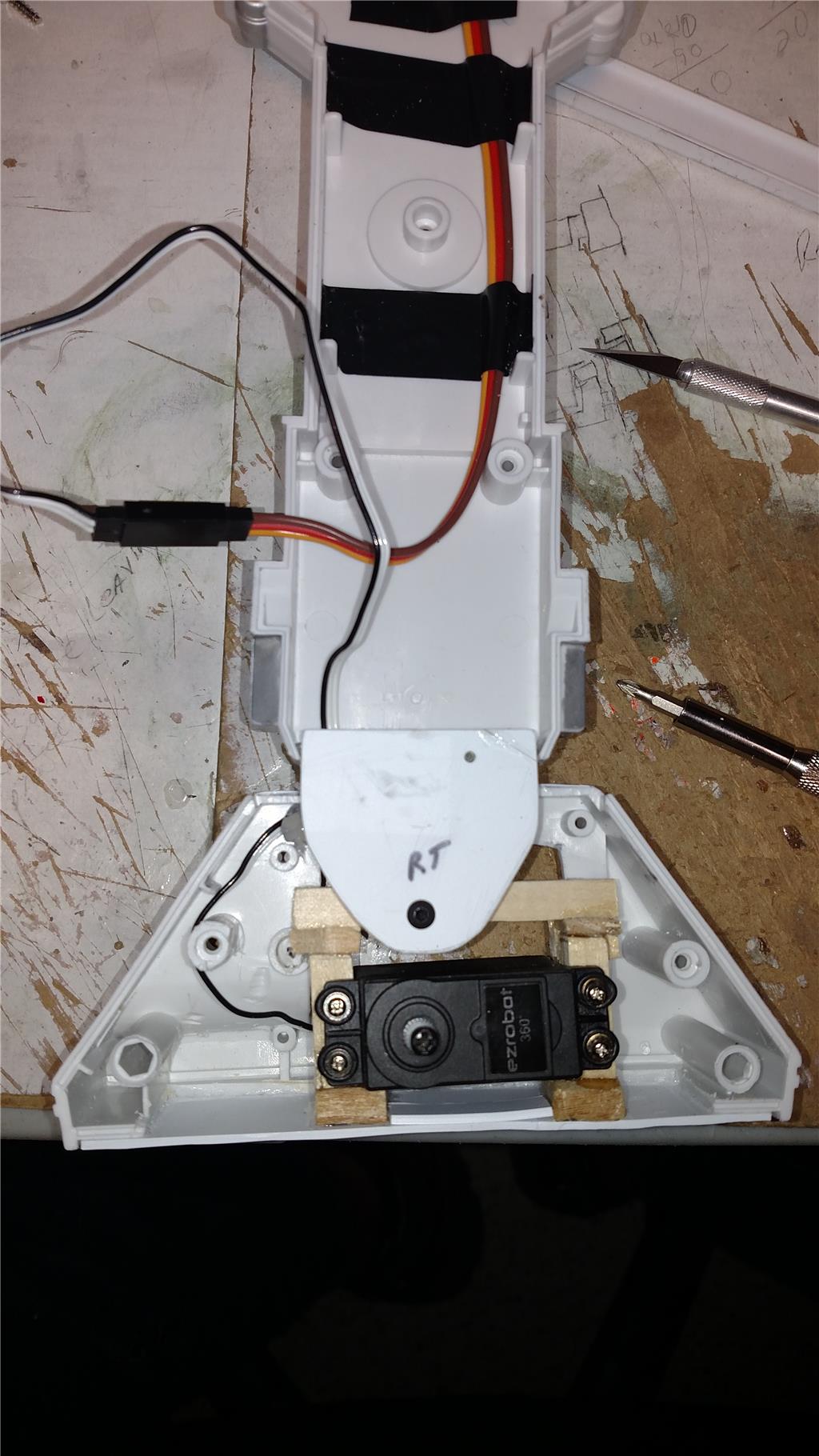
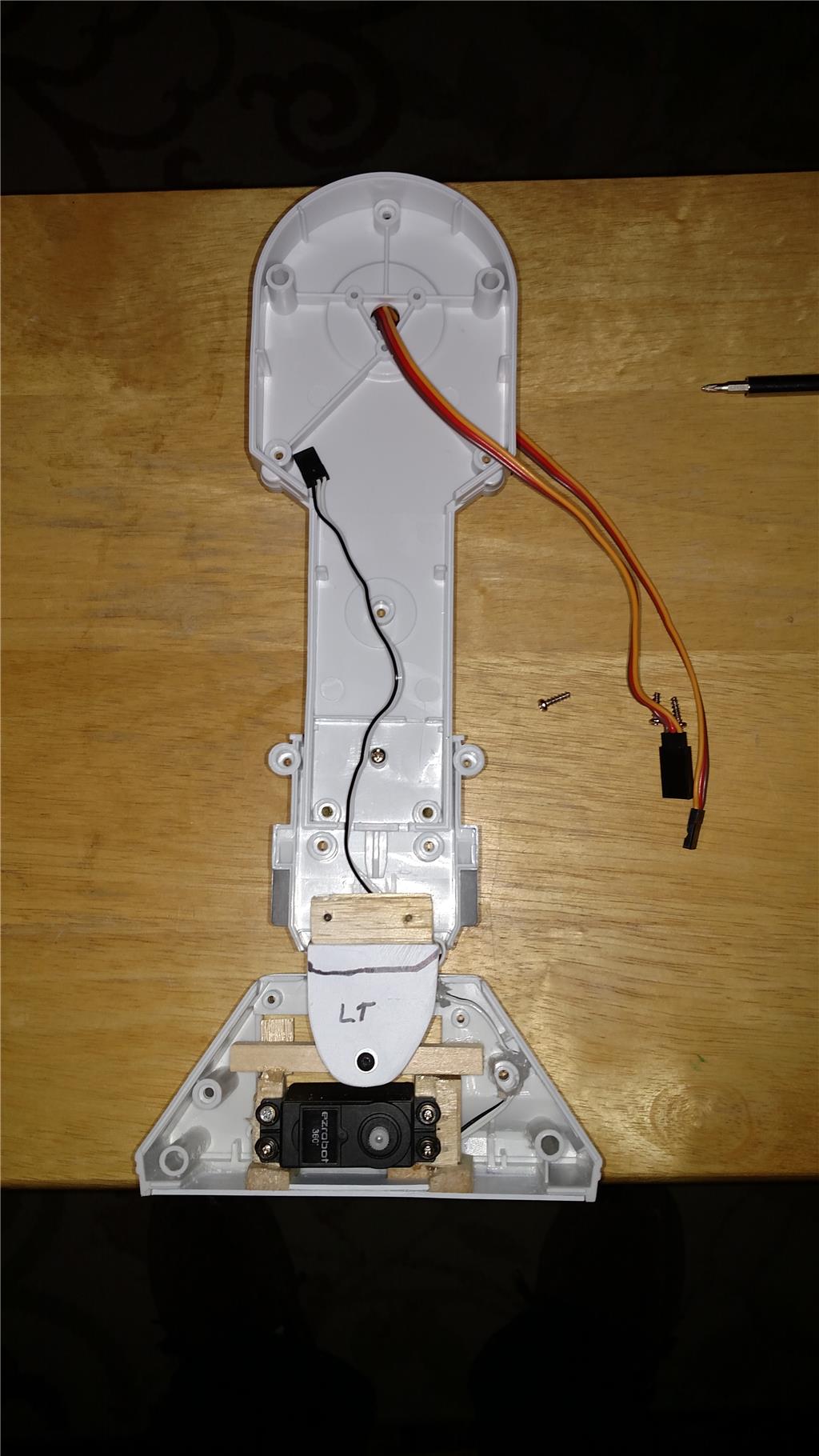





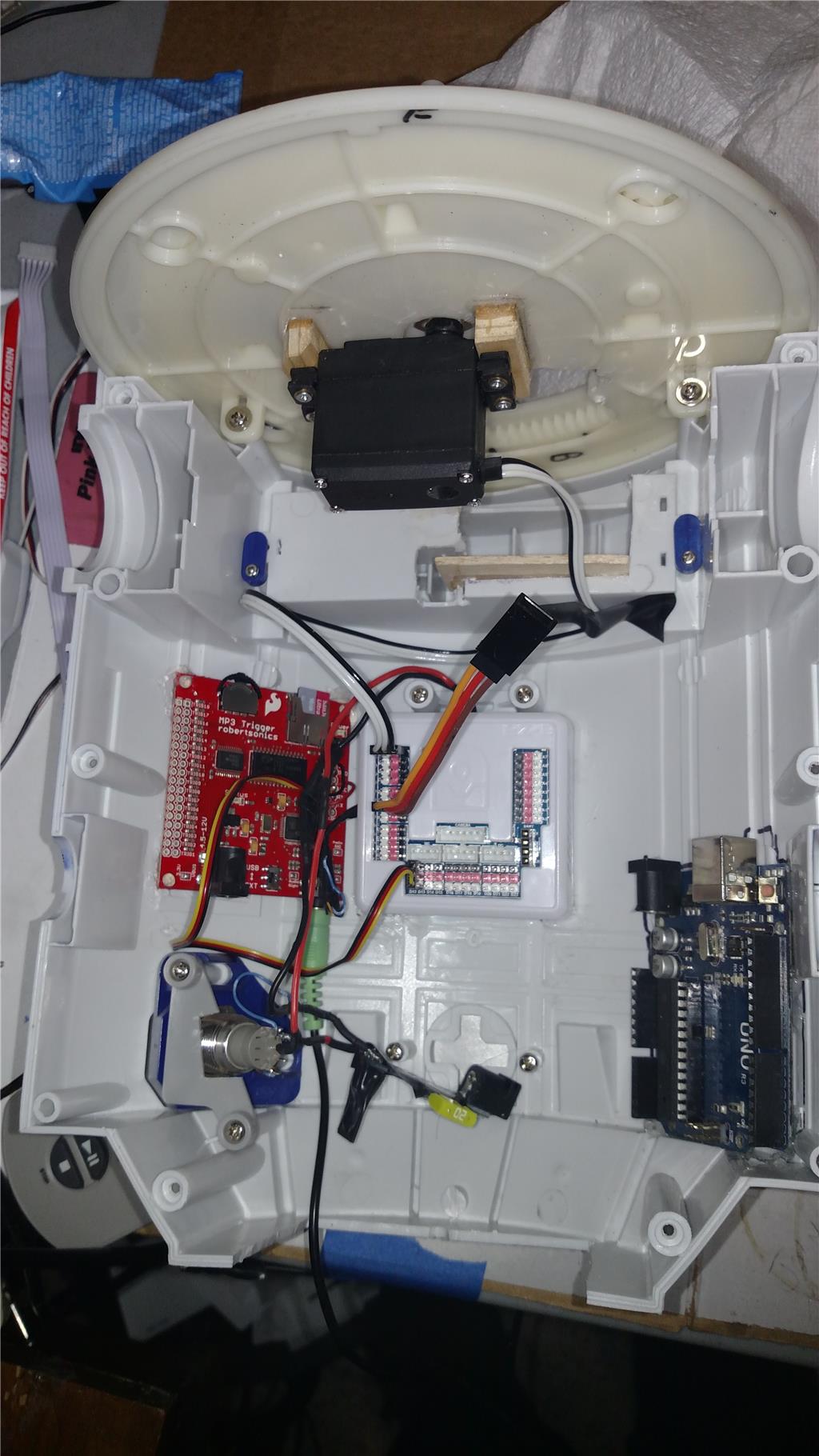

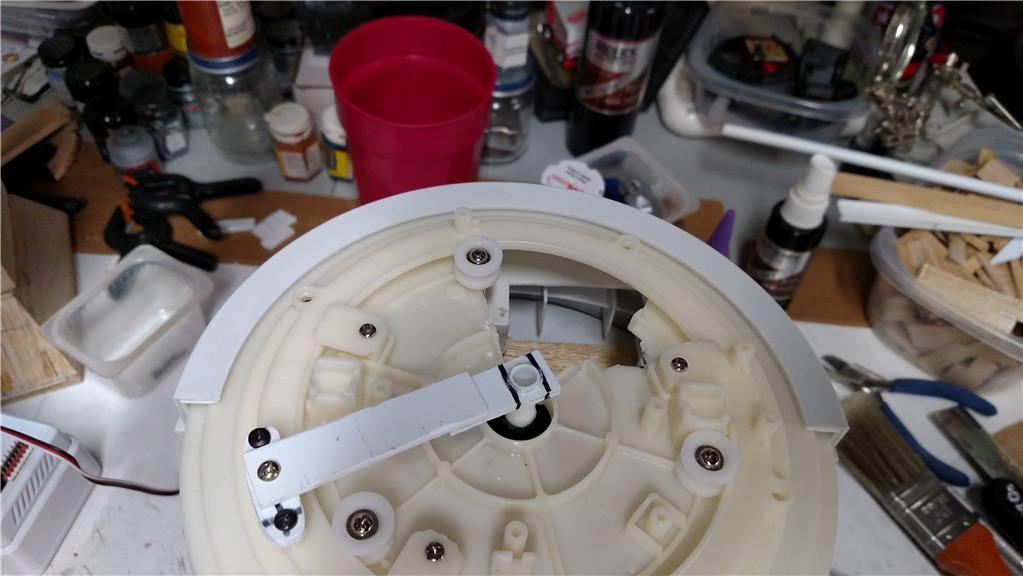
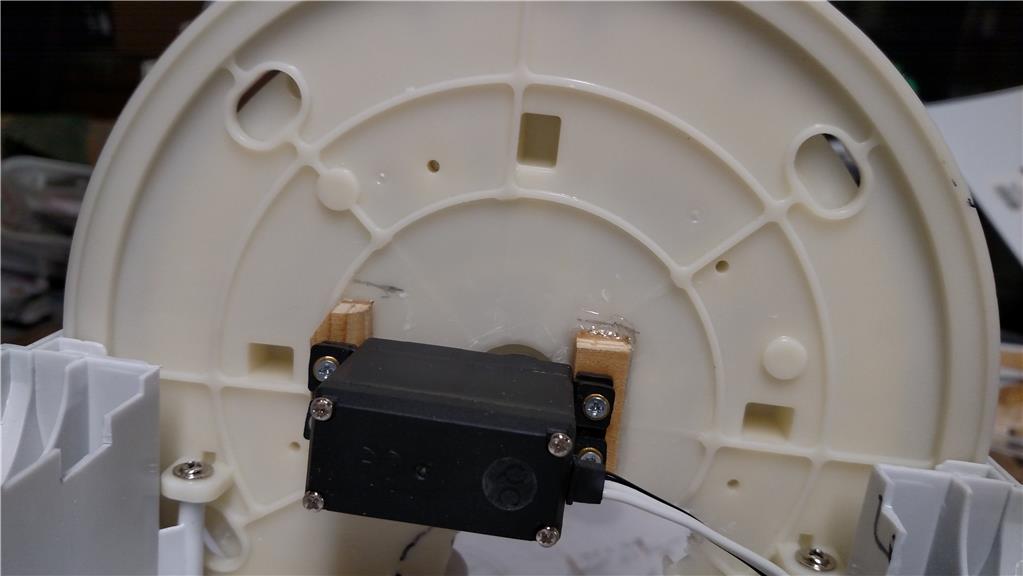

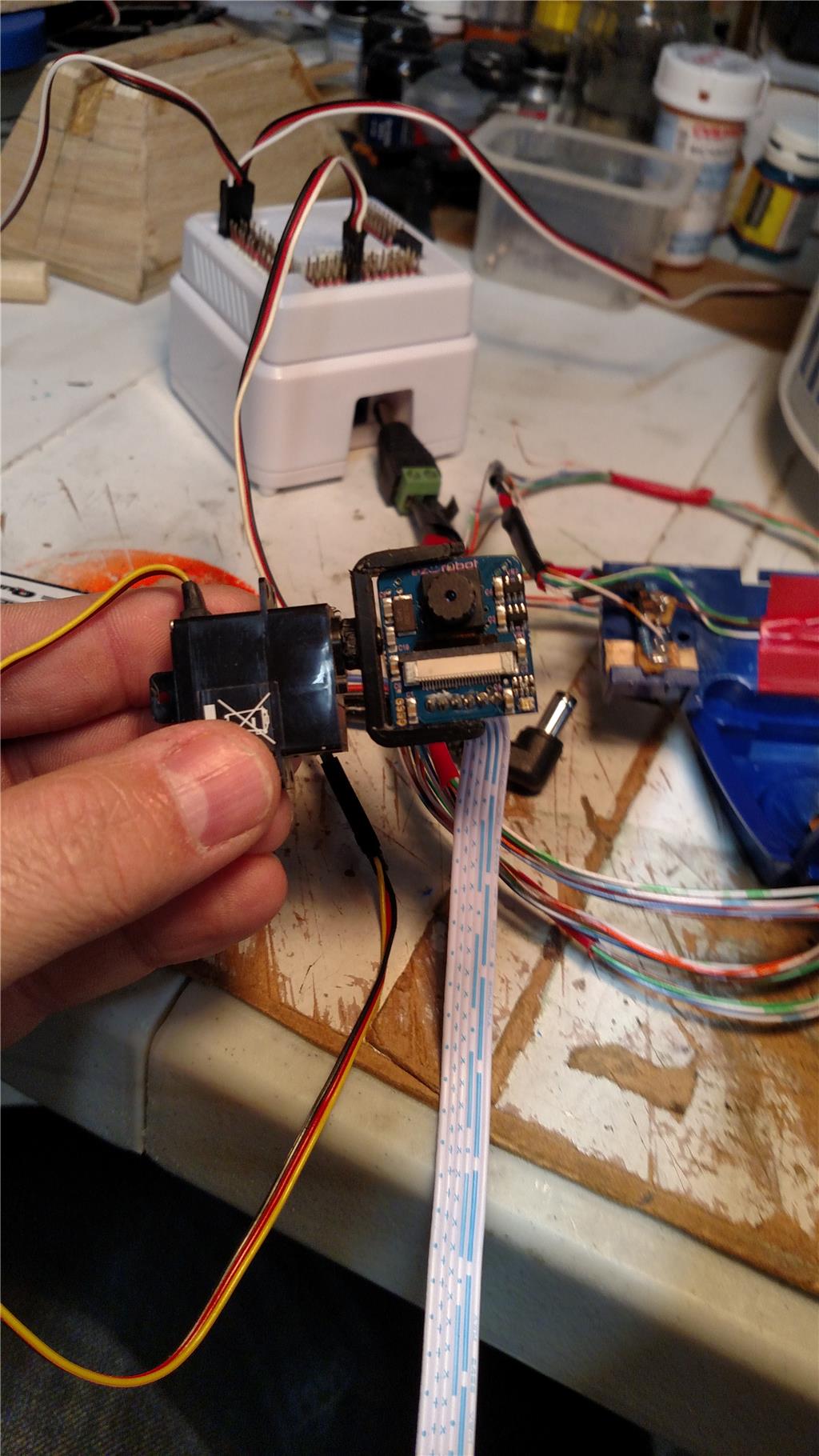

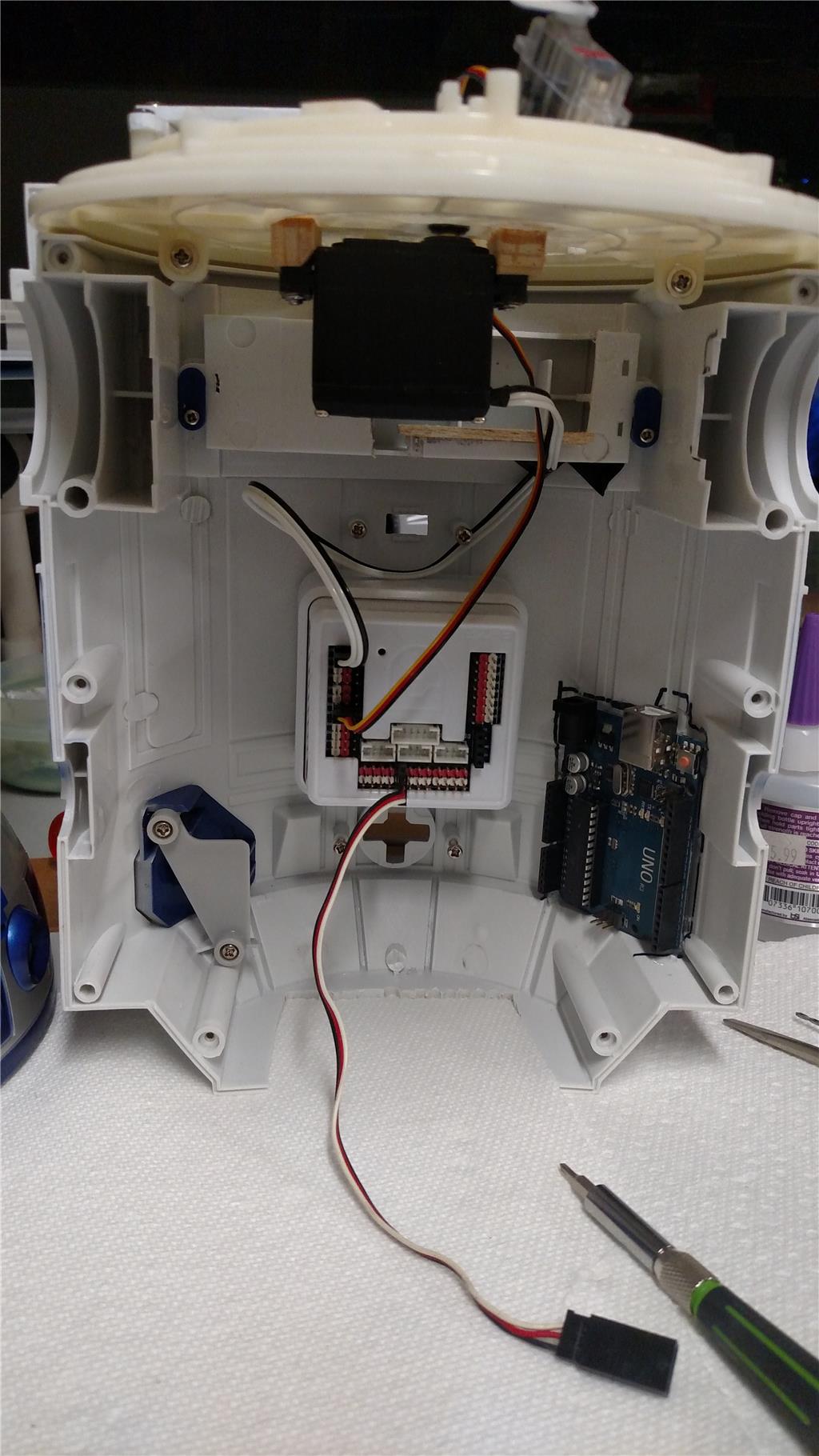


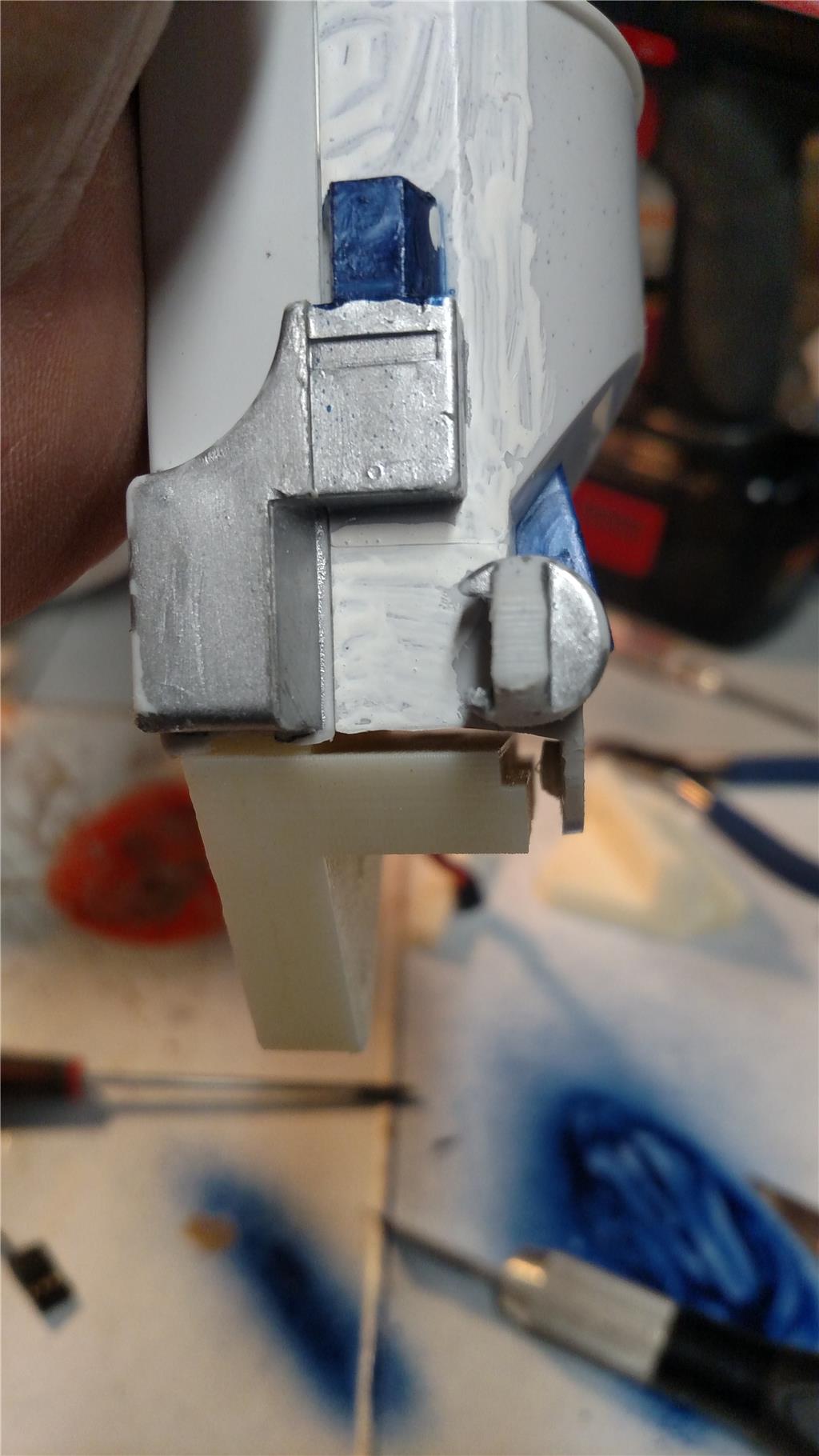

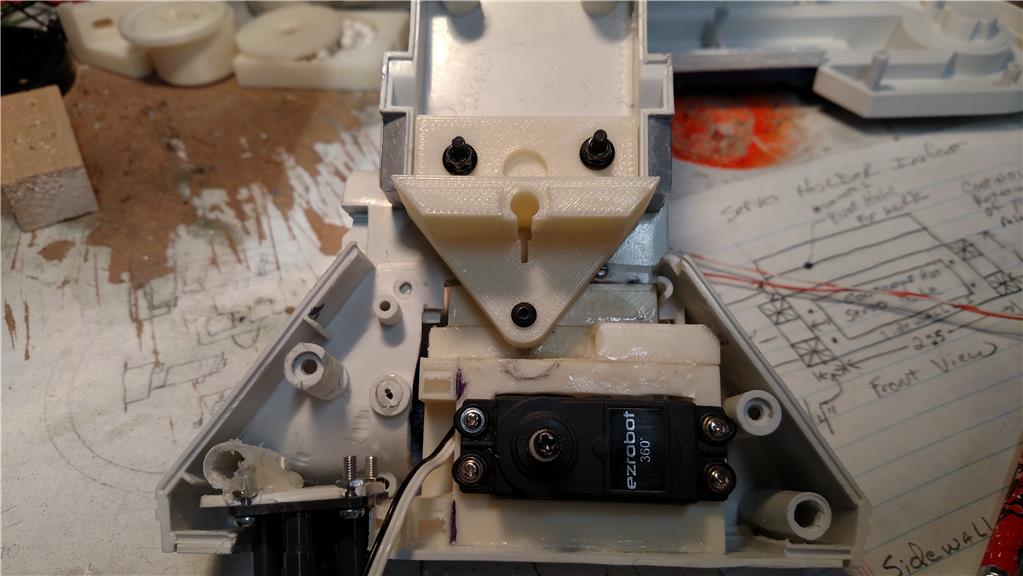






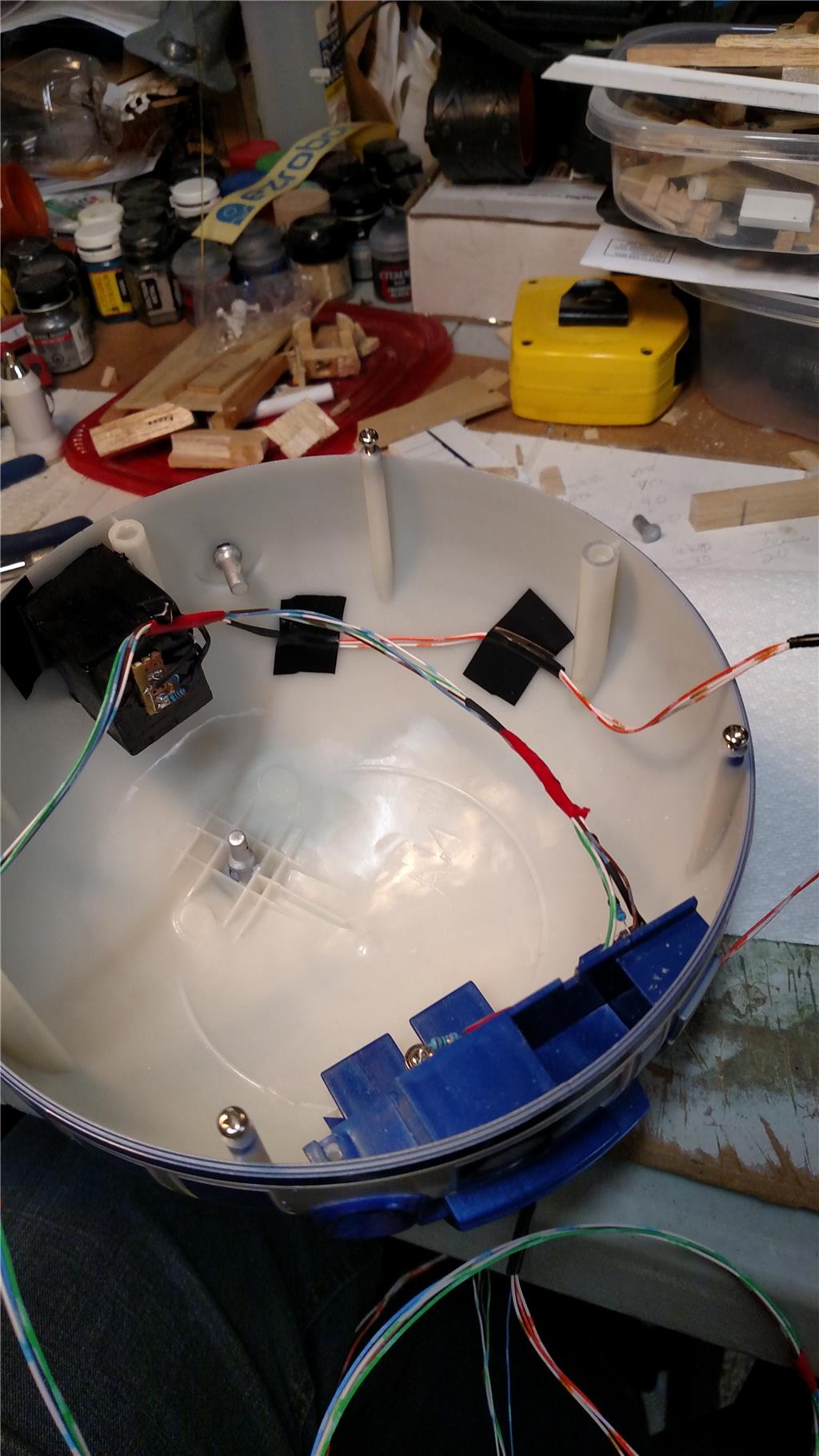
I am currently working on an 18 inch tall R2D2 that was purchased from Toys-R-US. This R2D2 had no electronics in it at all, just a pose able plastic model. It has a simple lazy susan type setup for the head movement. It has an upper gear and a lower plate. I put a EZ-Robot 360 degree (continuous) rotation servo in for the gear to rotate the head. The problem that I am having now is that the continuous rotation servo is difficult to stop at a give point, say 90 degrees. This faces my R2D2 head to the front. How would I control it like an Auto Position control, yet get the 360 degrees of movement out of it. with the Auto Position control I only get 180 degrees of movement. I am on a tight budget (unemployed) and am using what I have at my house for most everything I want to do with this R2 unit. The issue that I am having with the Auto Position is that once it hits the point it should stop, the servo keeps going until I hit the panic button to stop it. The stop button has no effect. Any idea's would be helpful. I have been programming with the EZ-Robot for about 4 months, but have programmed for 6 years with legacy software.
Regards, Richard
Discover more robots
Fxrtst's Untitled Hoverboard Project

Rentaprinta's First Real Video Of Hansi - Inmoov With...

@Nomad, I love your Idea for his name R2JD2 that is awesome. I have been calling him FUD2 DJ had mentioned he looked like a Minion do R2-Minion @RsSmith The main reason I went with the track base was with the legs, the body was always tilted up and his camera even with it pointed as far down as it would go still could no see the floor. So navigation was almost impossible. Also the rubber wheels did not work so good on any sort of carpet. How R2 managed to maneuver on Tatooine is beyond me. I am currently working on a new version with longer legs so as to keep the body always straight up and down.
When I put the camera in my R2 I have it so that it can move up and down. When I tilt the legs back to walk around I can shift the camera down to see the floor.
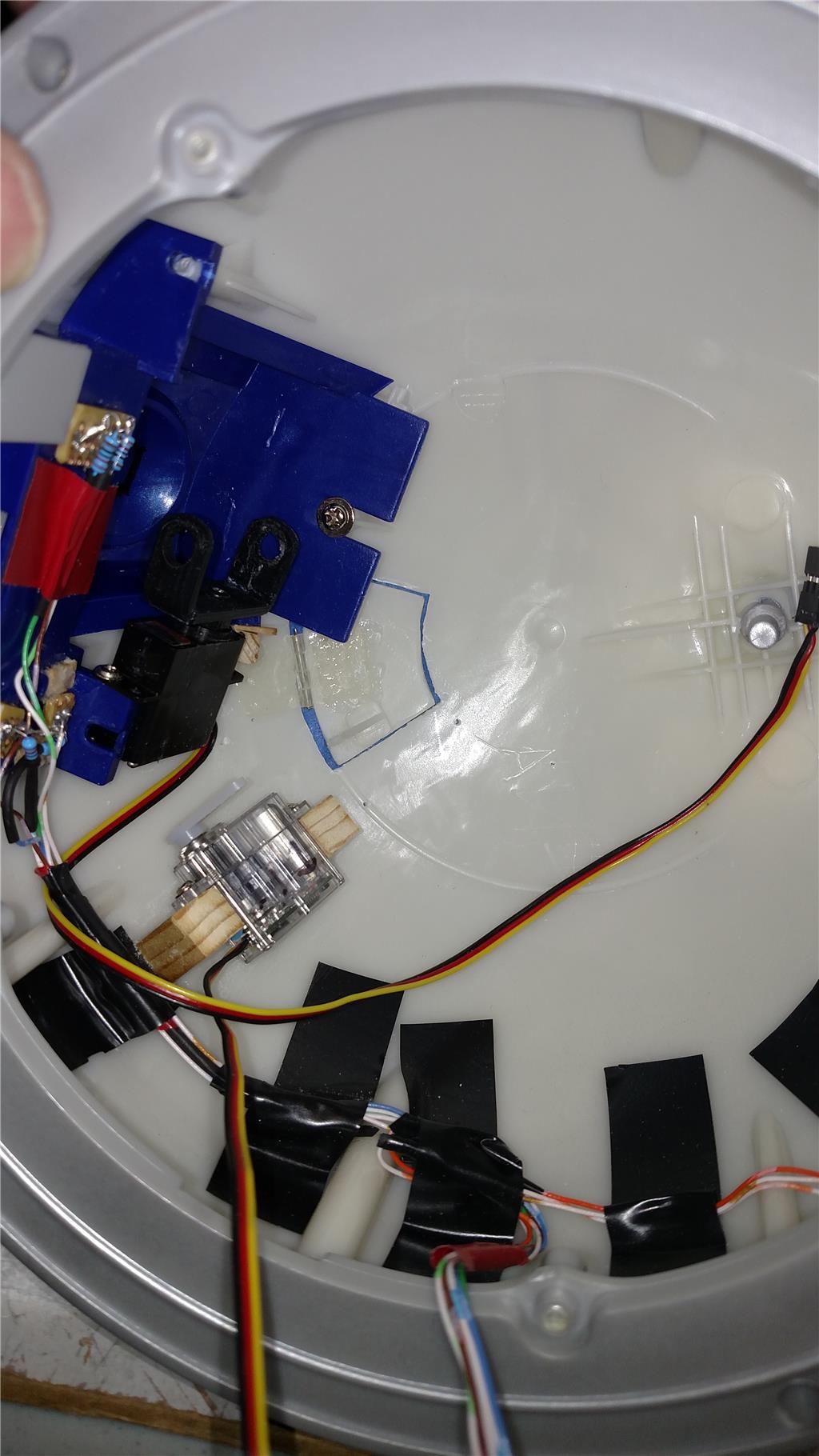
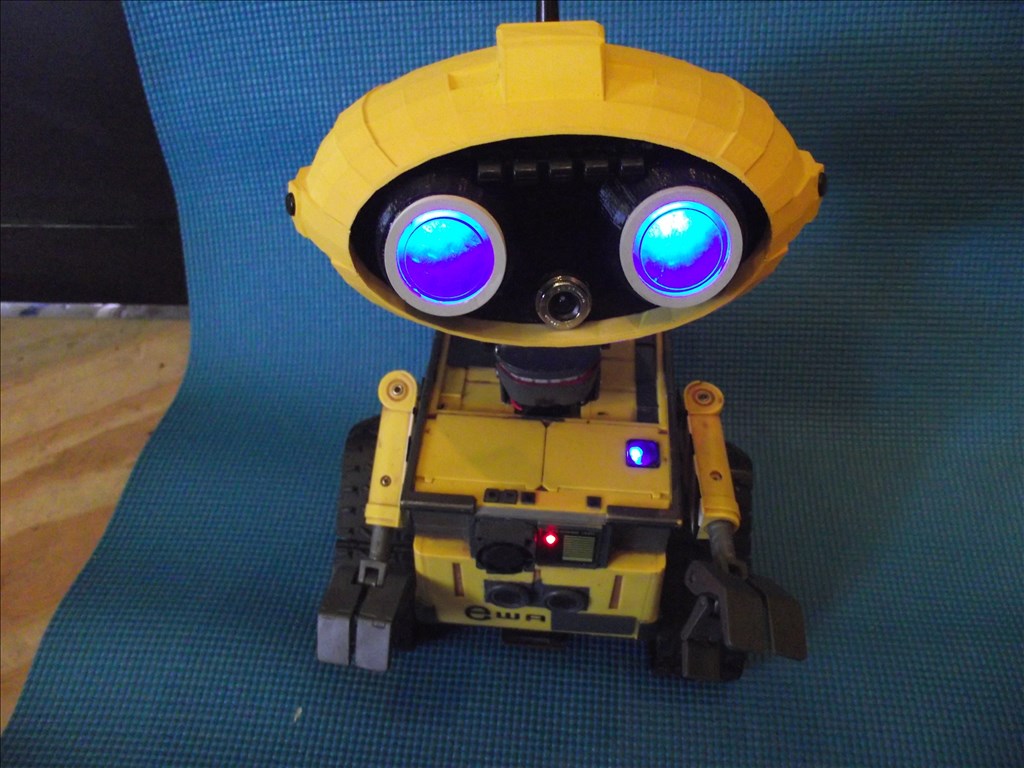
If you look at his large black circle (eye for lack of better terms) you can see the camera and the slot cut out from top to bottom. I "borrow" this idea from DJ, R2D2 robot. This allows me the movement to use the camera when walking about. But soon, that will not be necessary as I am putting in ultra sonic range finders so that he can avoid things on his own. The wheels could be wider and then I would not have as much trouble on carpet. That might be an upgrade for the future. I still have a couple of major system to complete on my R2 before is will be called done. Then upgrades, so it will never be done.
@rz90208 can't wait to see your long legged R2.
@RsSmith, I have my camera setup much the same as yours and I ended up moving the front foot to the back. but did not like the look.
@rz90208 I noticed from this picture you had/have an ultra sonic range finder in your R2. How did that work for you ? I am planning on using 2 of them mounted in the skirt to help my R2 with his obstacle avoidance so he can have an autonomous mode. Is that how you used yours ?
@RSmith Yes, but the beam on them is wide so for obstacle avoidance they work good, for navigation not so much.
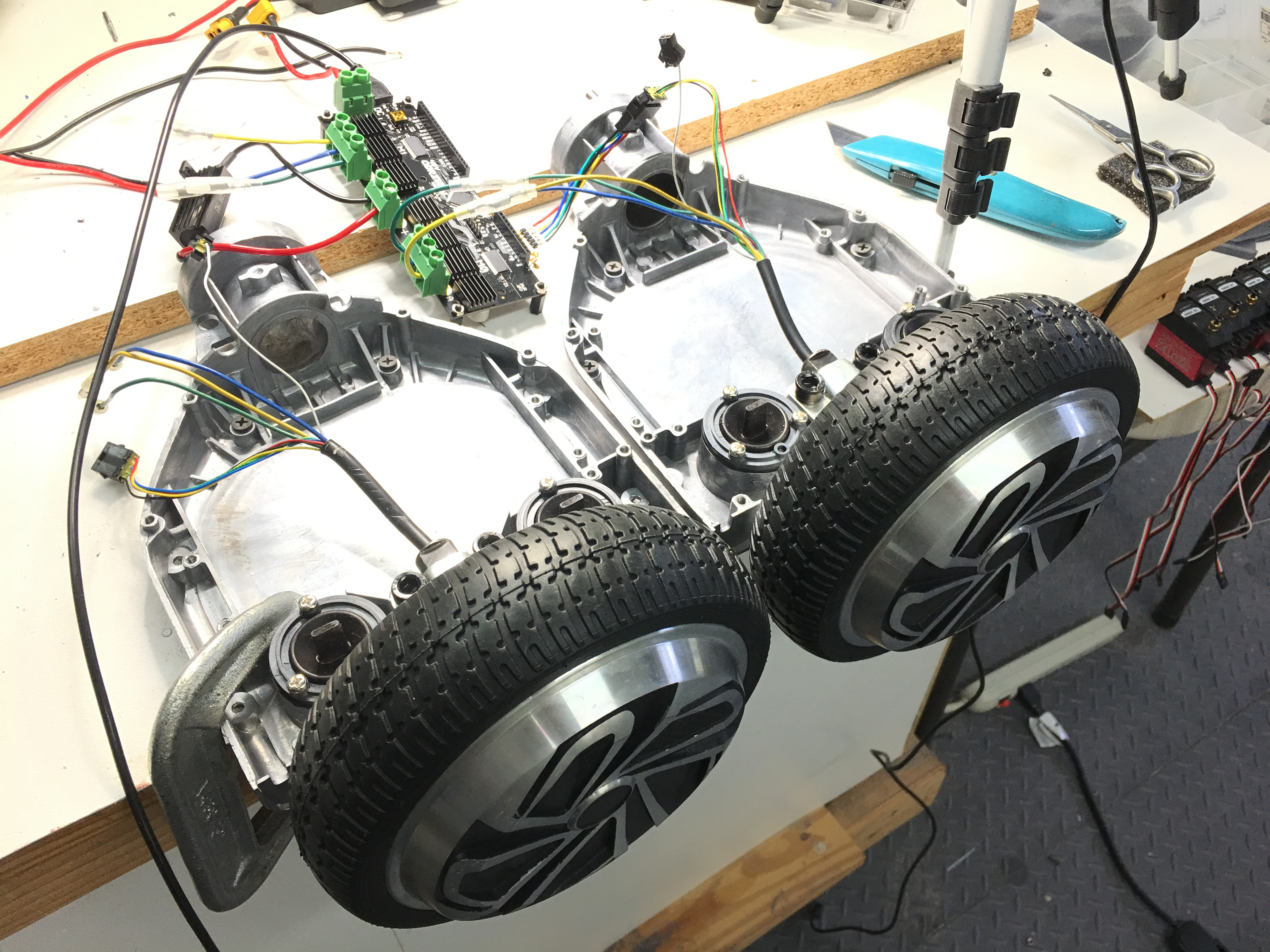
@RSmith Additional info. I have found that the sensors have a smaller beam if mounted vertical verses horizontal plus you can mount more in less space. Then reading 3 or 4 sensors you get a better of the size and location of the object. Here is one of my bots I was working with, I do not have a pic of the vertical setup.
Thank you @rz90208 for the additional tips. I will be using the range finders in a horizontal pattern. I will be placing 2 of them in R2 skirt so they overlap.
I am going to move the camera to a different spot. Like @rz90208 said you just can't get low enough view to drive from the camera. Sorry my mistake. Since my camera was knocked out at the office from crashing. I just need to find a really really good spot for it. I will post when I find a good spot. Looking like the vents, but not sure.
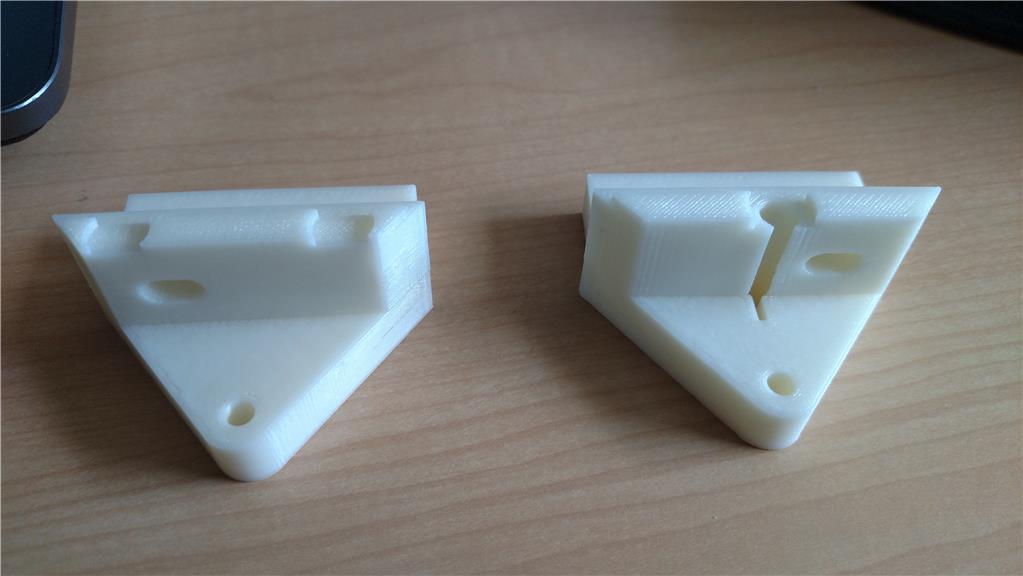
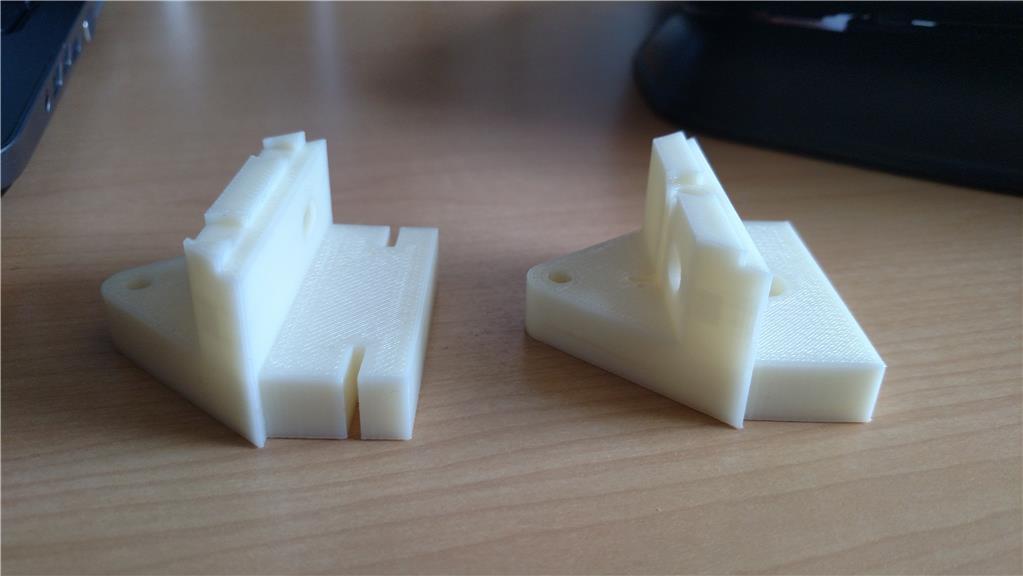
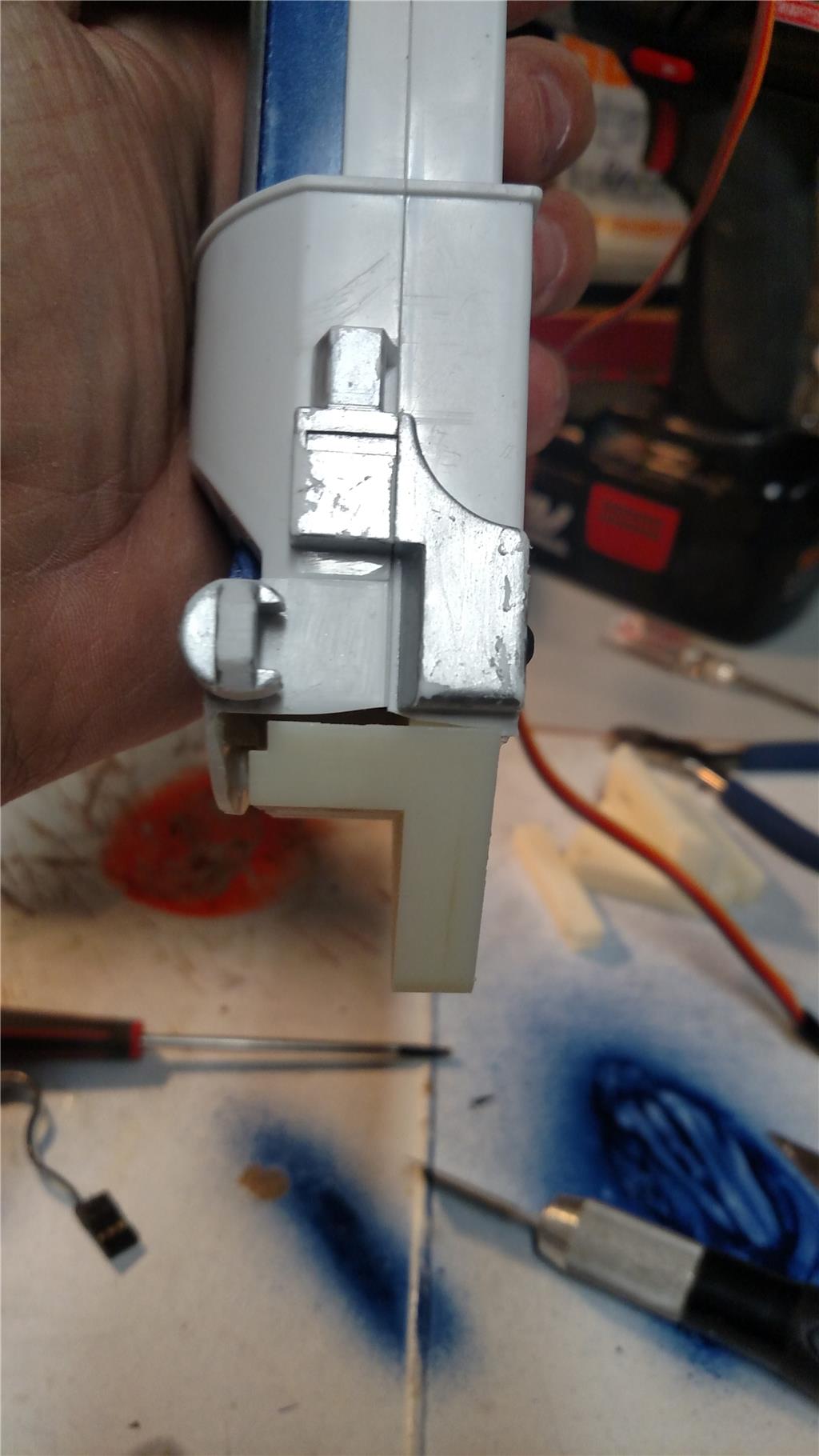
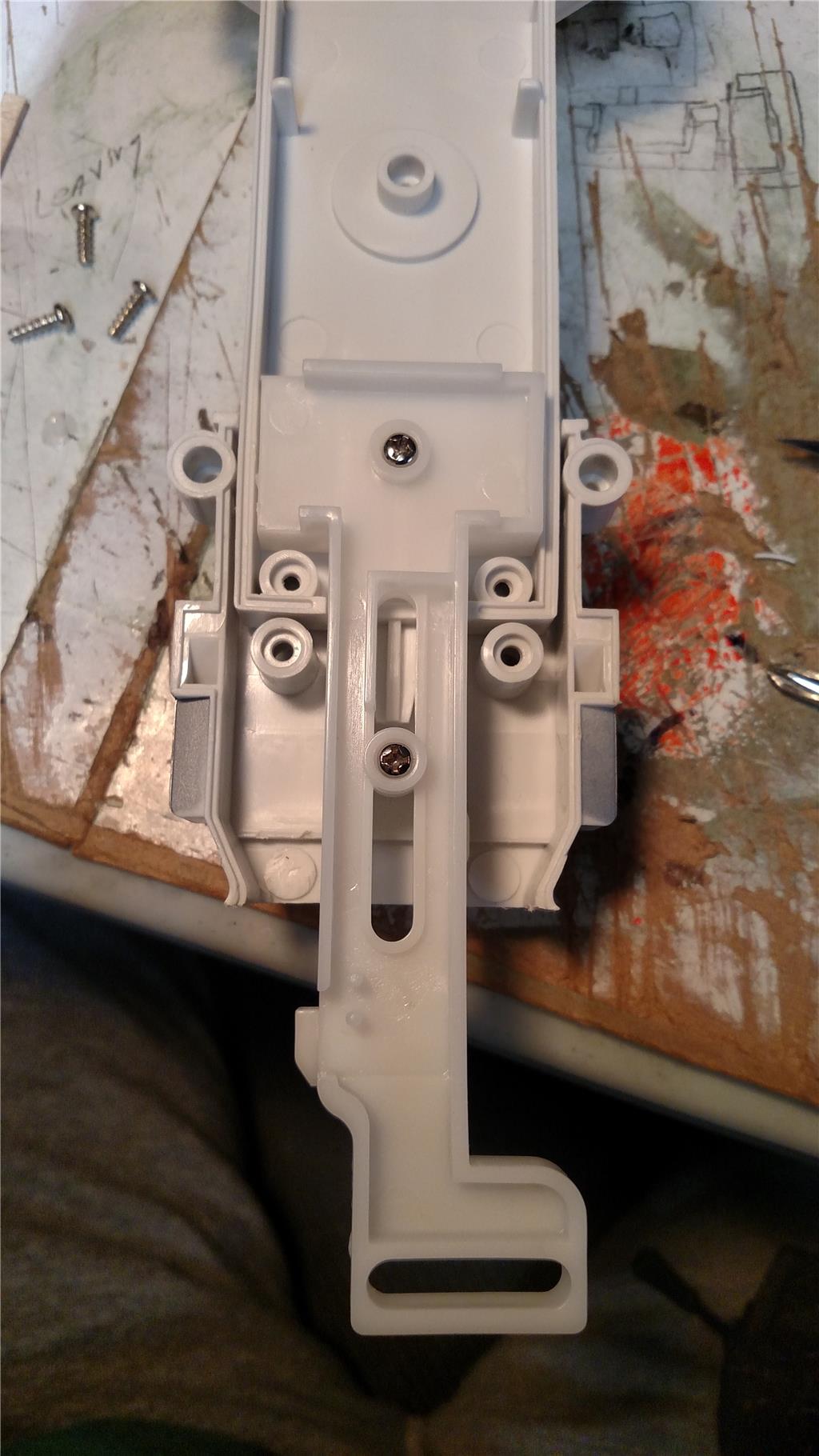
I have 3D printed items from a Thingiverse post about R2D2 shoulders and ankles. Below is a link to this post. So far this would have saved me a lot of time and effort with the ankles. Jakks Pacific 18" R2-D2 Mods
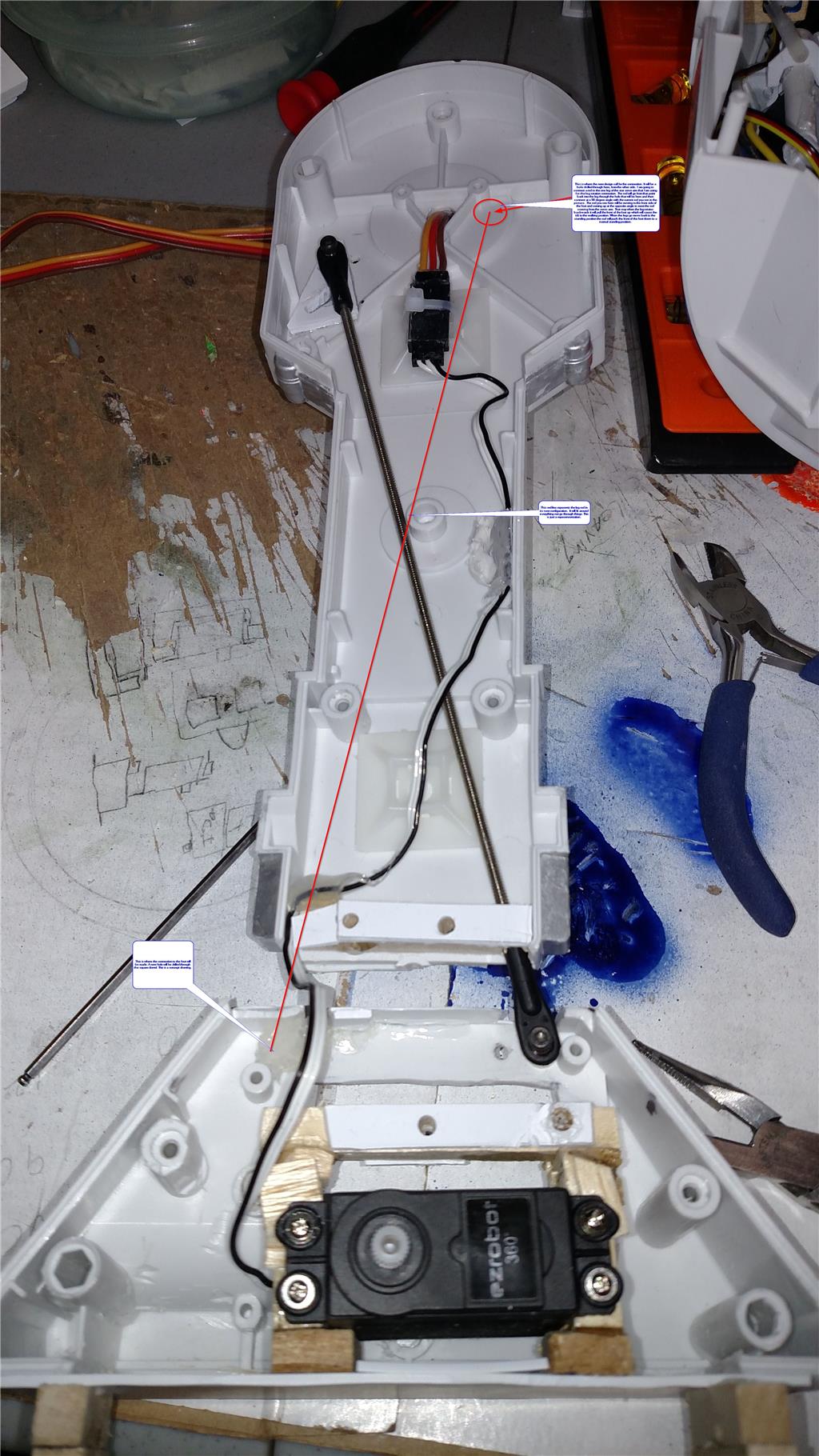
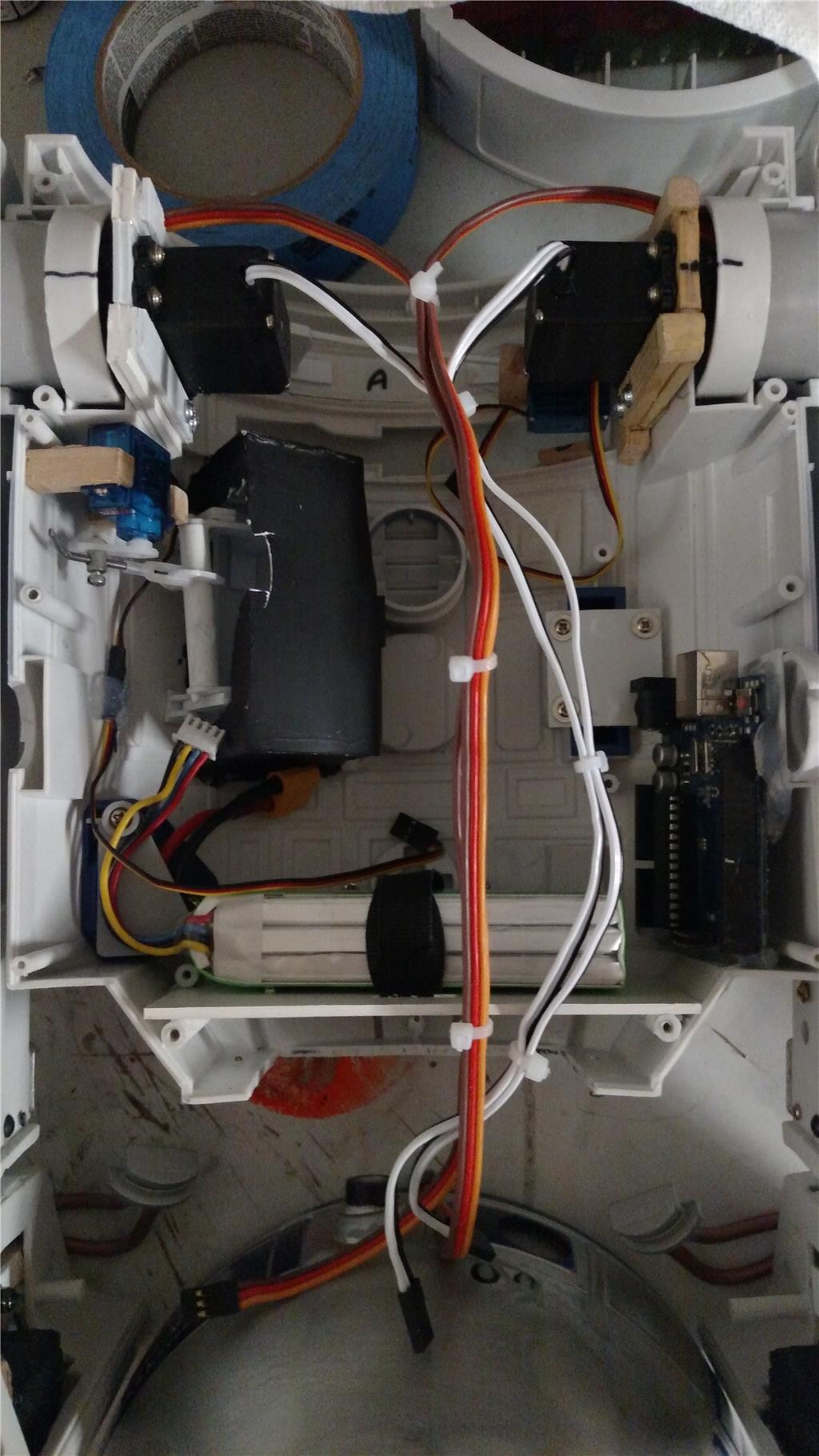
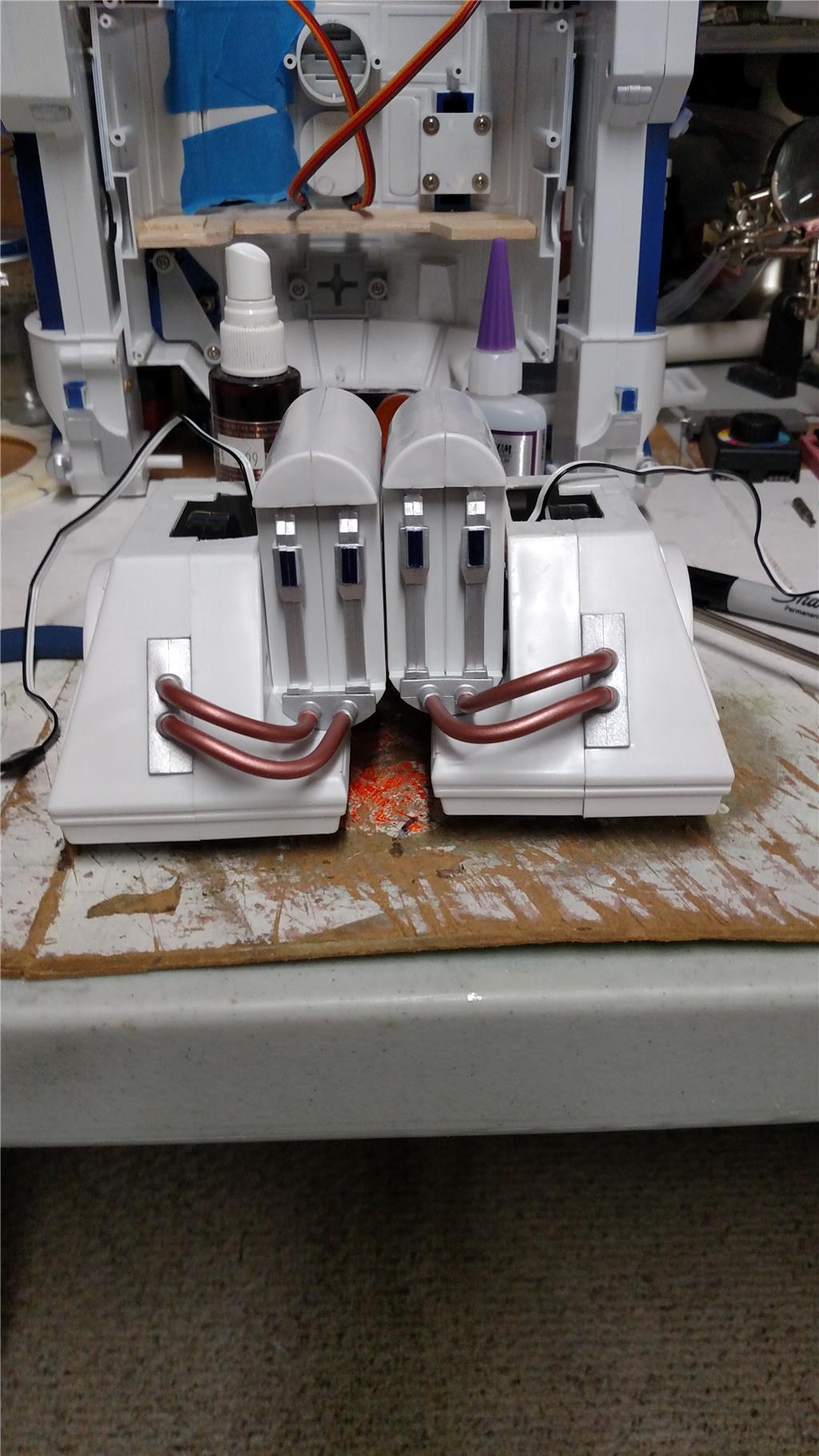
I got R2 home from the office yesterday and immediately tore him back apart to replace his ankles and as of Friday his shoulders. The new shoulders have slots for the connecting rods between the feet and shoulders for stability purposes. The programming items that need to be completed are the motion detect and the range finding. The motion detector is mounted already in the front power coupling circle, and I will need to drill holes for the range finders, then mount. I also have 2 more dome doors to complete. One is for the LFS (Life Form Scanner) and the periscope. I am having both the LFS and the periscope 3D printed.
@RSmith A really good use of the ping ))) sensor is for a cliff sensor. Aiming down and a little forward to watch for a drop off.
I like what you are doing with the dome doors, when you are done post your stl files. I think I will add these to my R2.
cheers.