



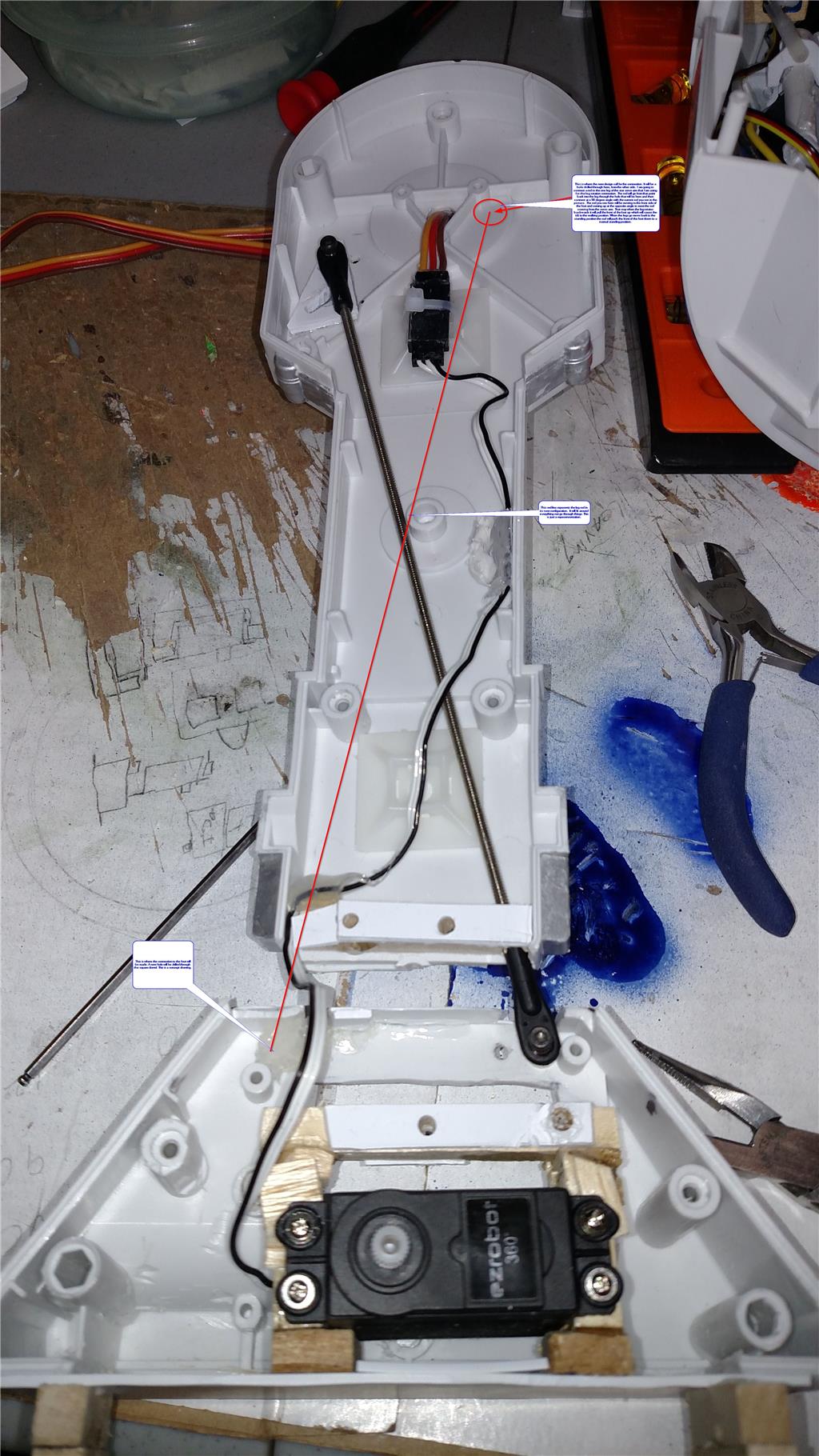



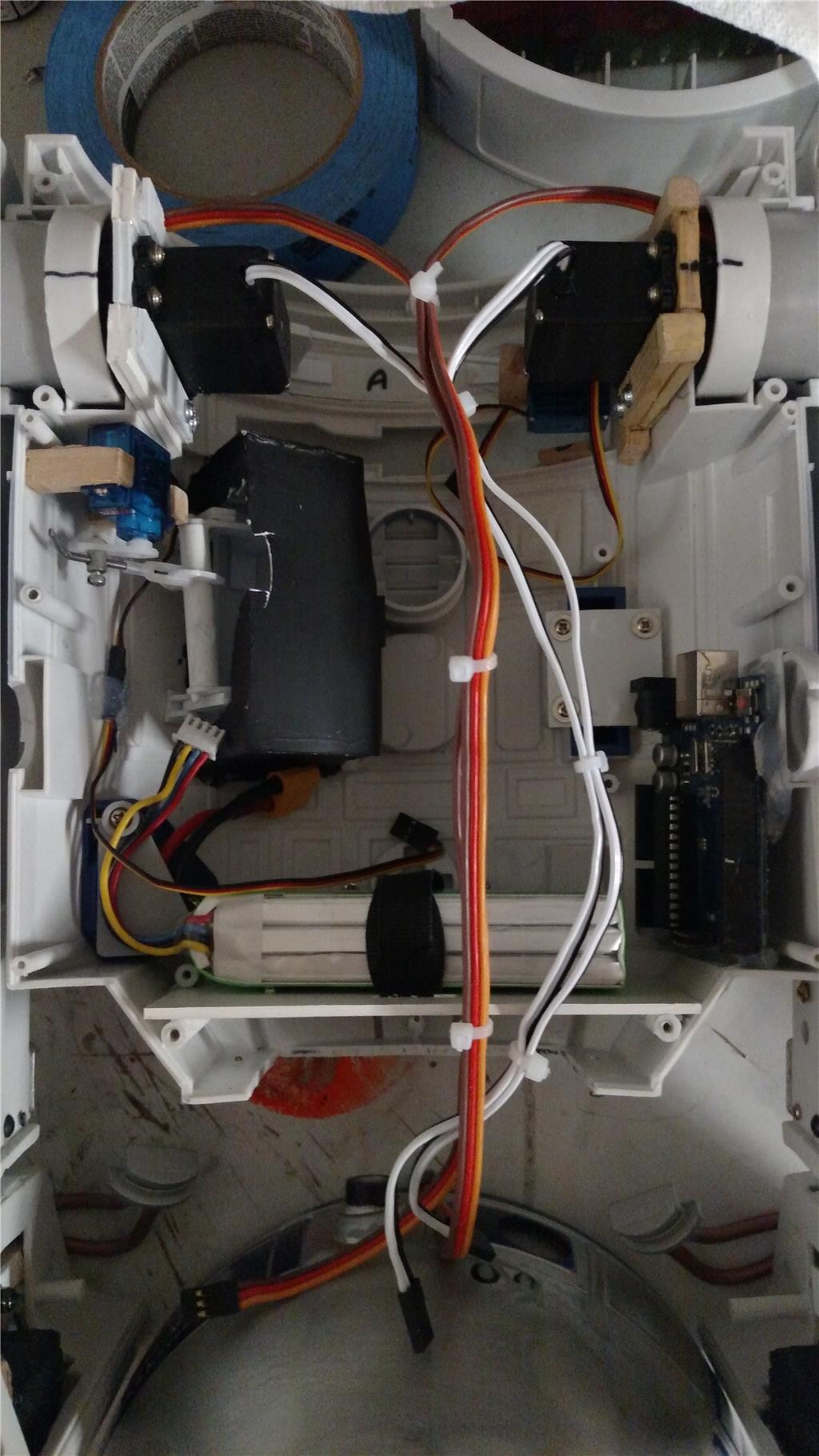





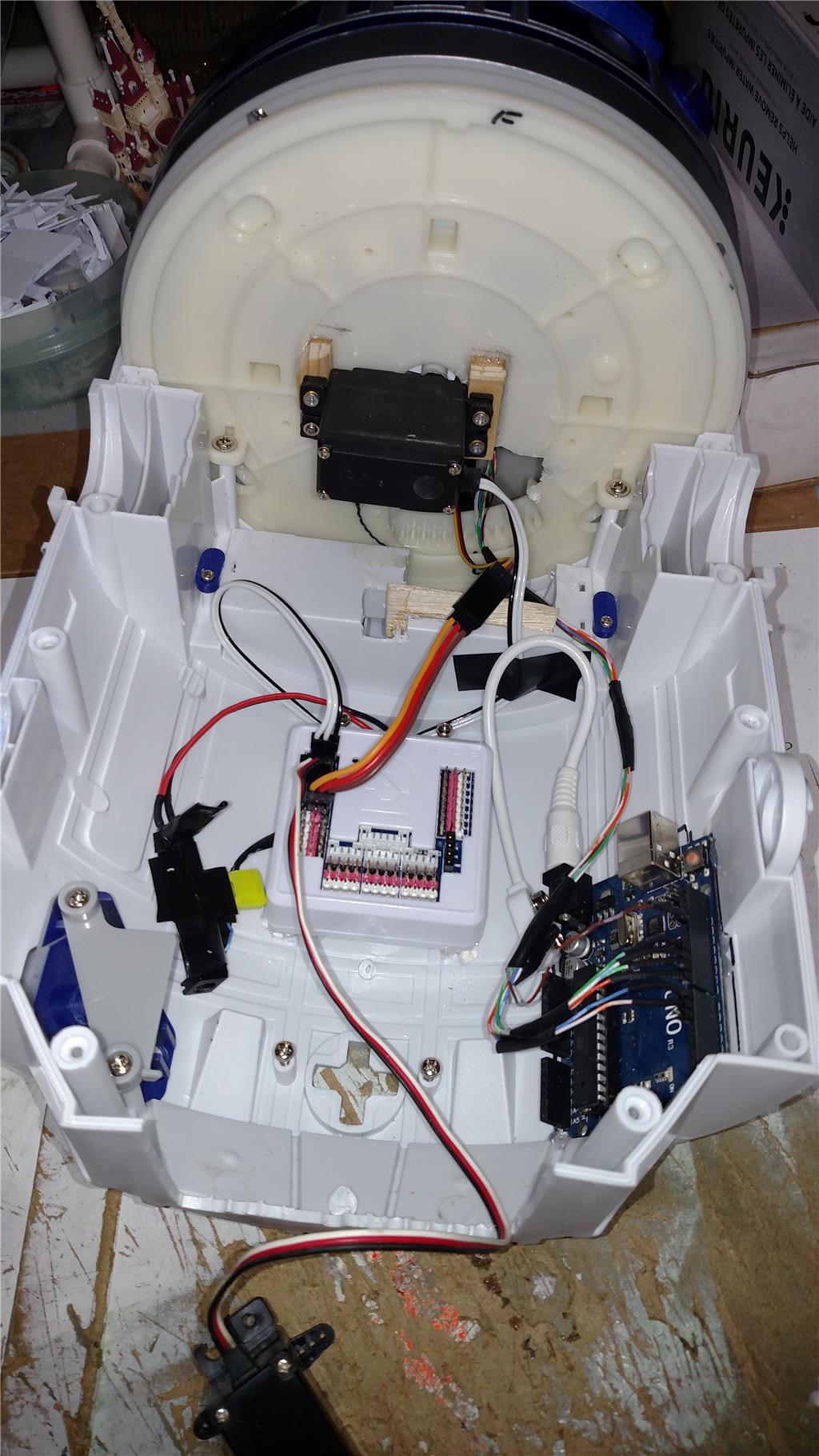
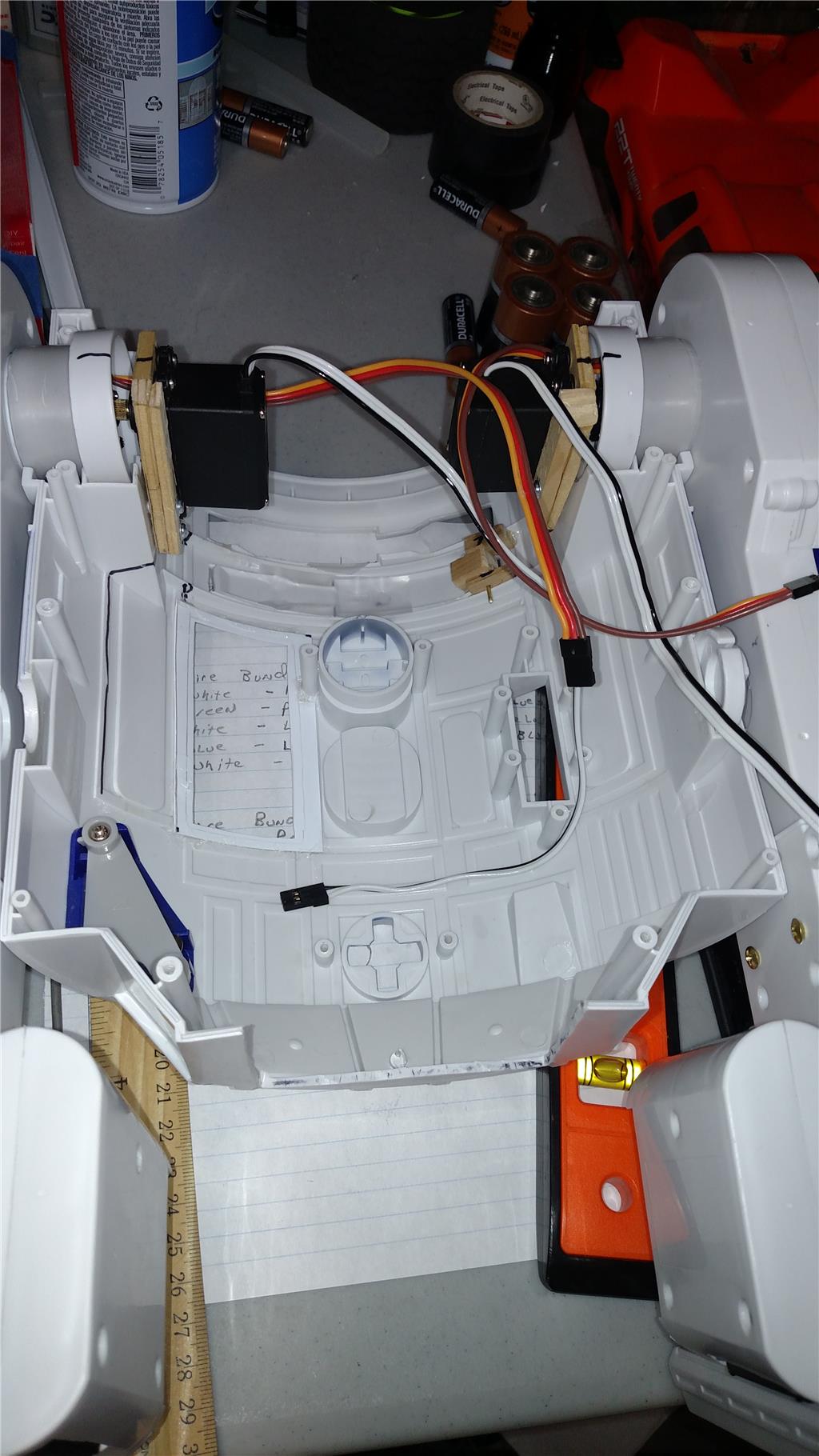


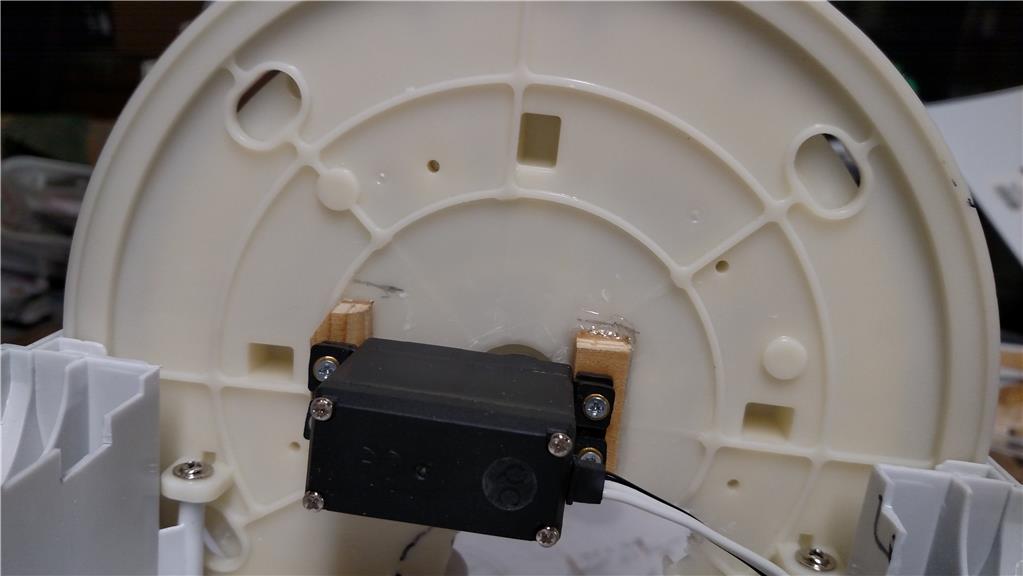











I am currently working on an 18 inch tall R2D2 that was purchased from Toys-R-US. This R2D2 had no electronics in it at all, just a pose able plastic model. It has a simple lazy susan type setup for the head movement. It has an upper gear and a lower plate. I put a EZ-Robot 360 degree (continuous) rotation servo in for the gear to rotate the head. The problem that I am having now is that the continuous rotation servo is difficult to stop at a give point, say 90 degrees. This faces my R2D2 head to the front. How would I control it like an Auto Position control, yet get the 360 degrees of movement out of it. with the Auto Position control I only get 180 degrees of movement. I am on a tight budget (unemployed) and am using what I have at my house for most everything I want to do with this R2 unit. The issue that I am having with the Auto Position is that once it hits the point it should stop, the servo keeps going until I hit the panic button to stop it. The stop button has no effect. Any idea's would be helpful. I have been programming with the EZ-Robot for about 4 months, but have programmed for 6 years with legacy software.
Regards, Richard
Discover more robots

Mcjeff0125's Ez Rover Mark I

Rb550f's Jo Robosapien Project


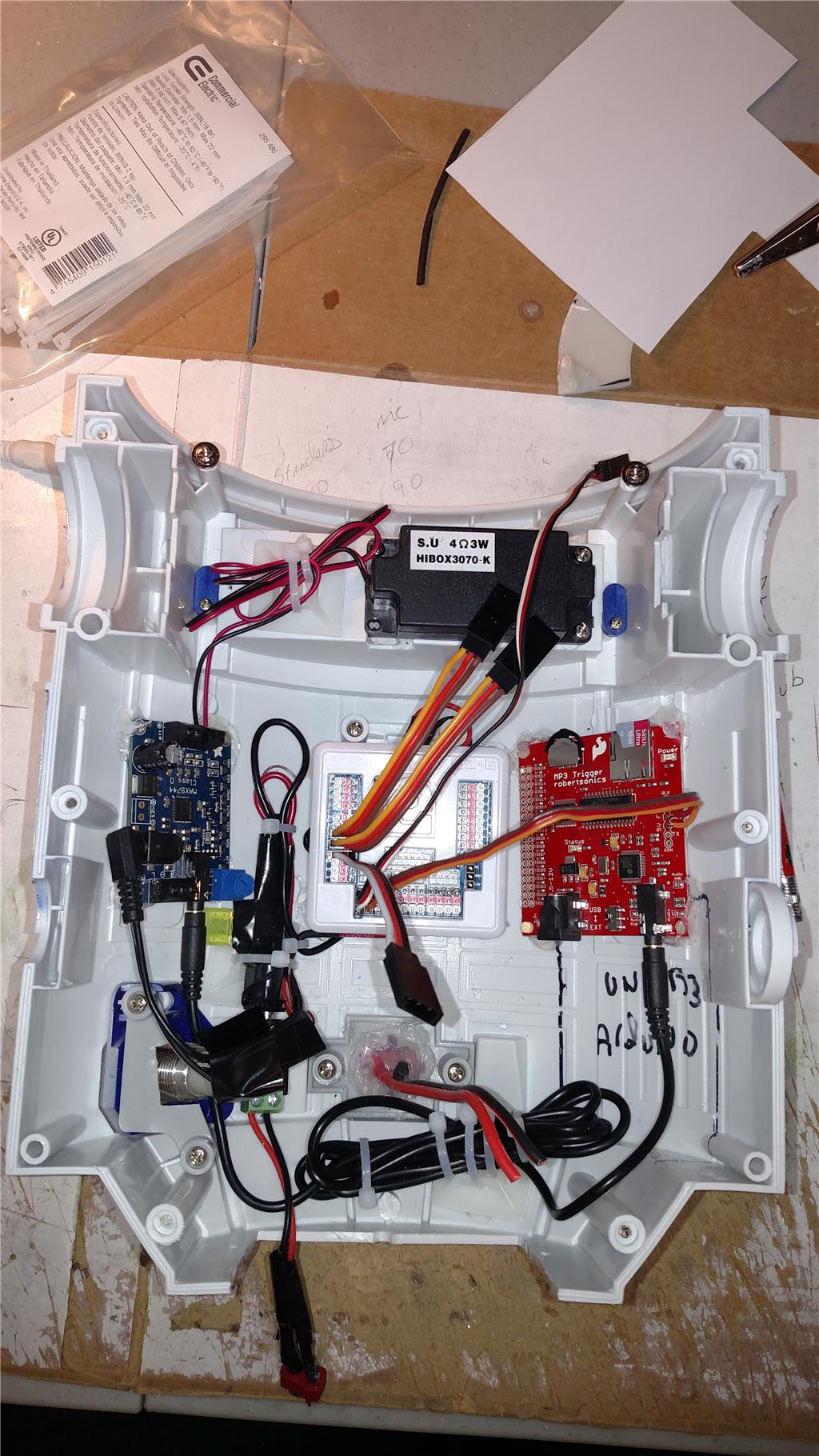
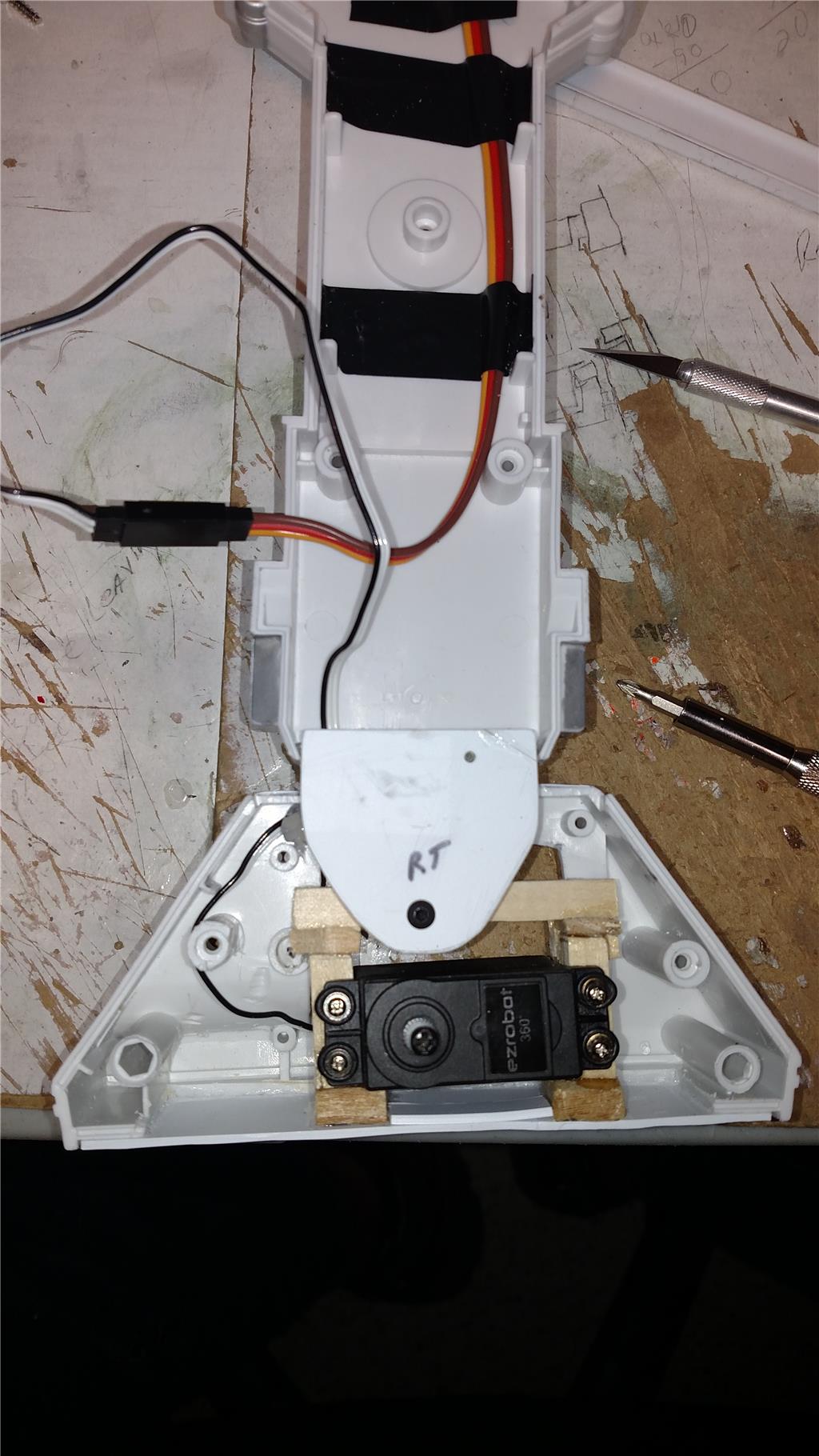
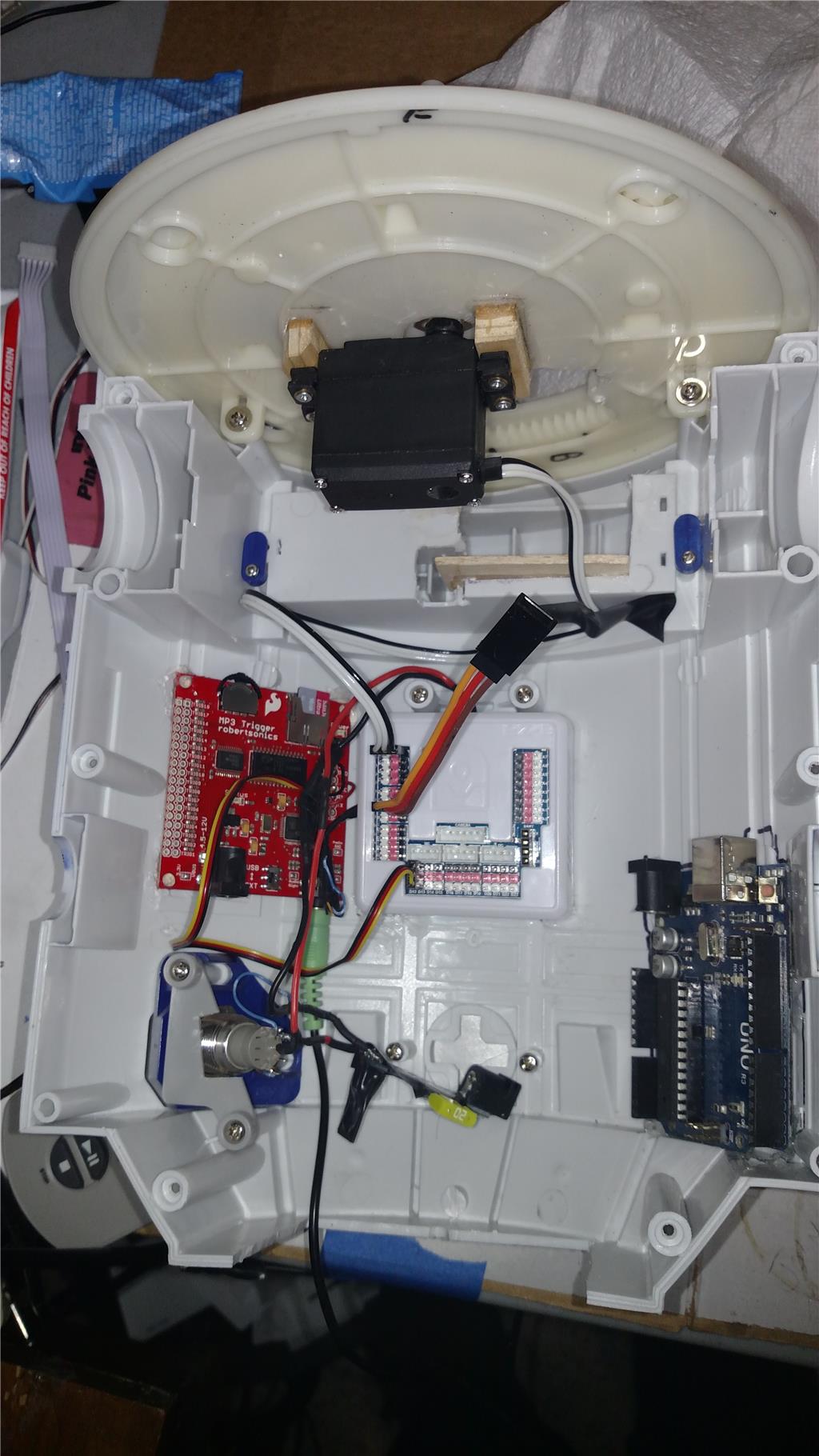
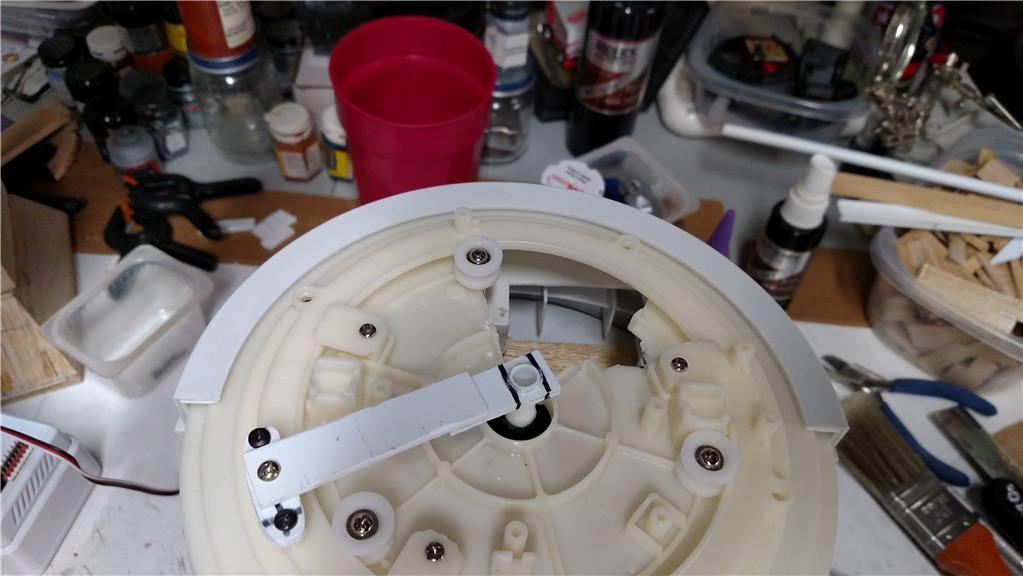
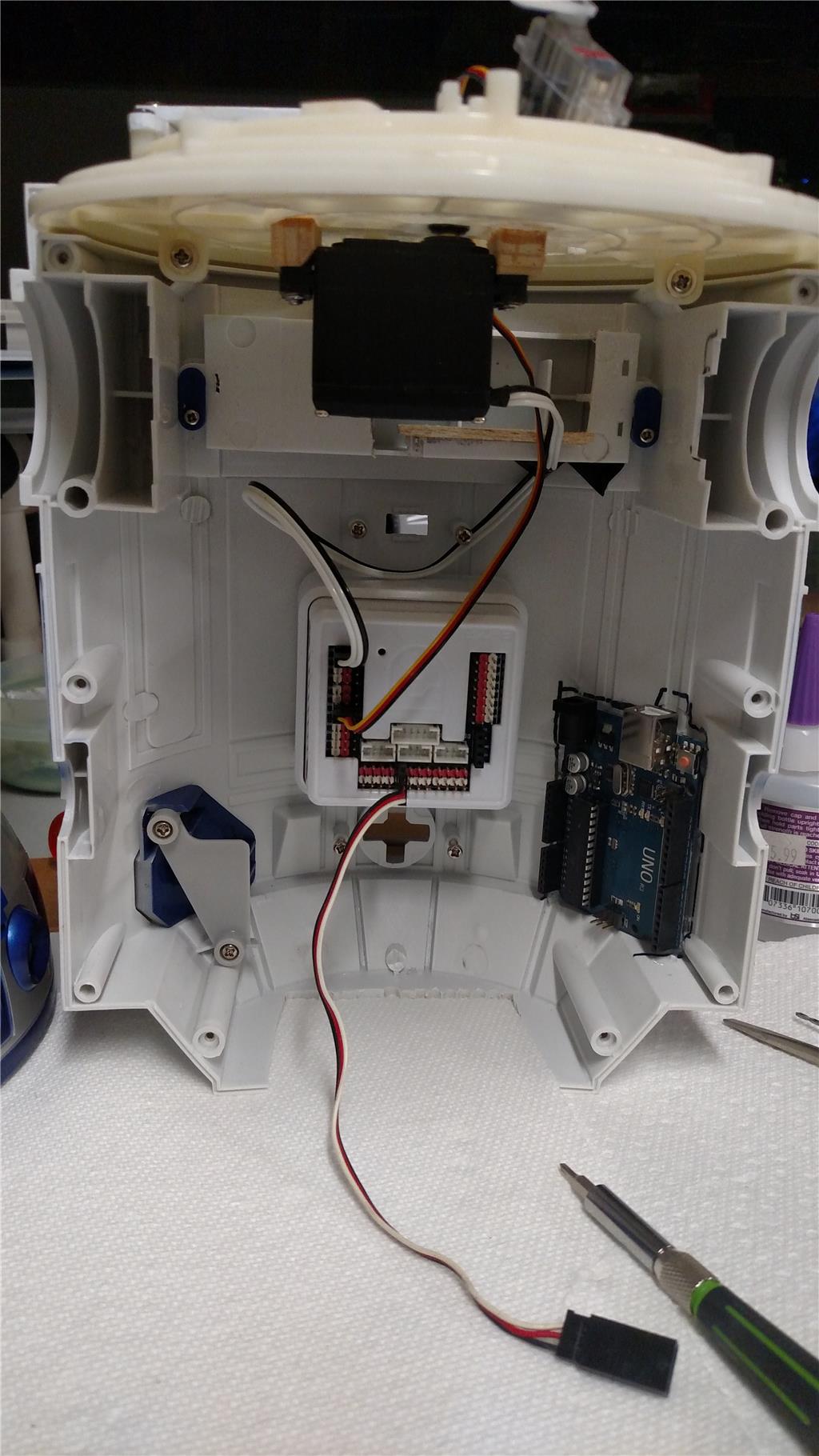
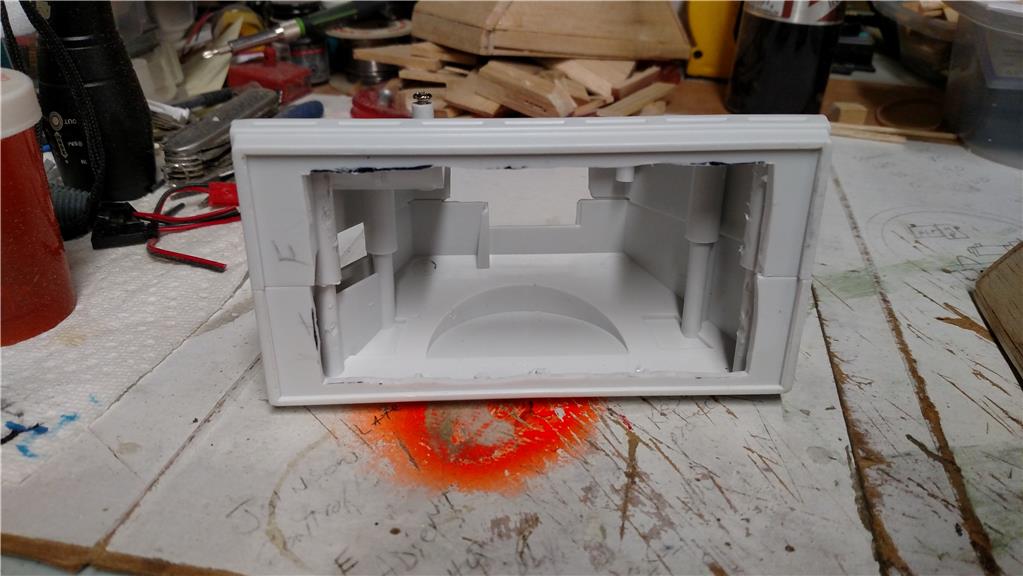
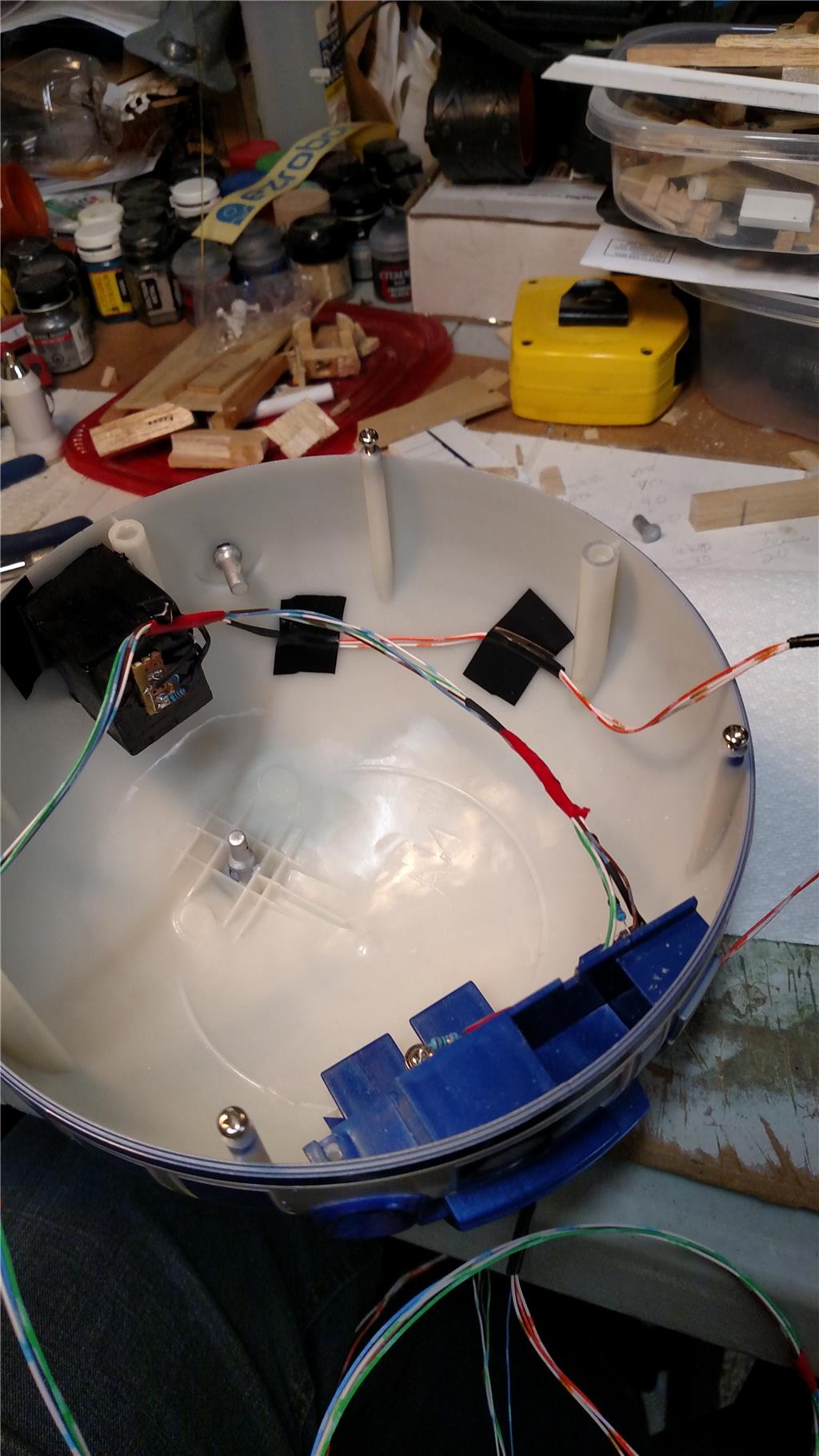
Update: 03-02-2018 Have gotten the 1st of 5 dome doors operational. It looks ok, but needs a paint job. I am now working on the door in the torso, just to the right of the vents. I have also mounted one of the leg rotation servos and have gotten it working. The leg is very tight so the servo is constantly humming. I will be working on loosening up the leg so that the servo use less torque to turn the leg. The two youtube links are for the videos for the dome door and the leg movement. I am also working on getting the feet mounted to the legs so that they will move when the leg rotates. I have gotten the MP3 trigger sound board installed and working good, to completely put it in R2 I need an amp and small speaker. Got my power switch installed and wired. Got my 3D printed front foot from @AndyRoid STL files. It printed out great. Working on the second dome door and one of the doors in the torso. See the youtube video (link below) for other updates. I moved the wires in the leg away from the circles. Thanks to @Nomad 6 for that tip. That's it for now.
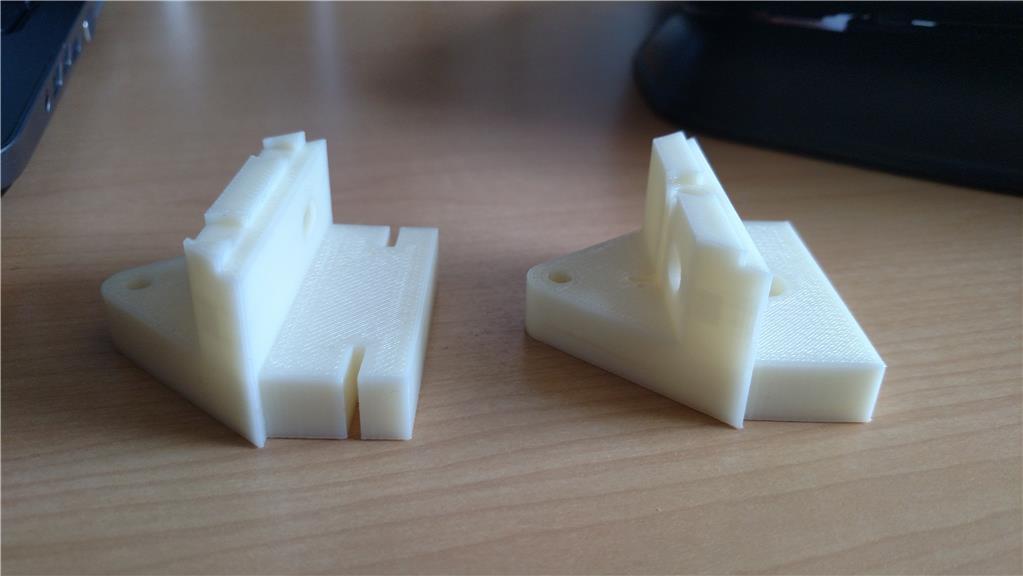
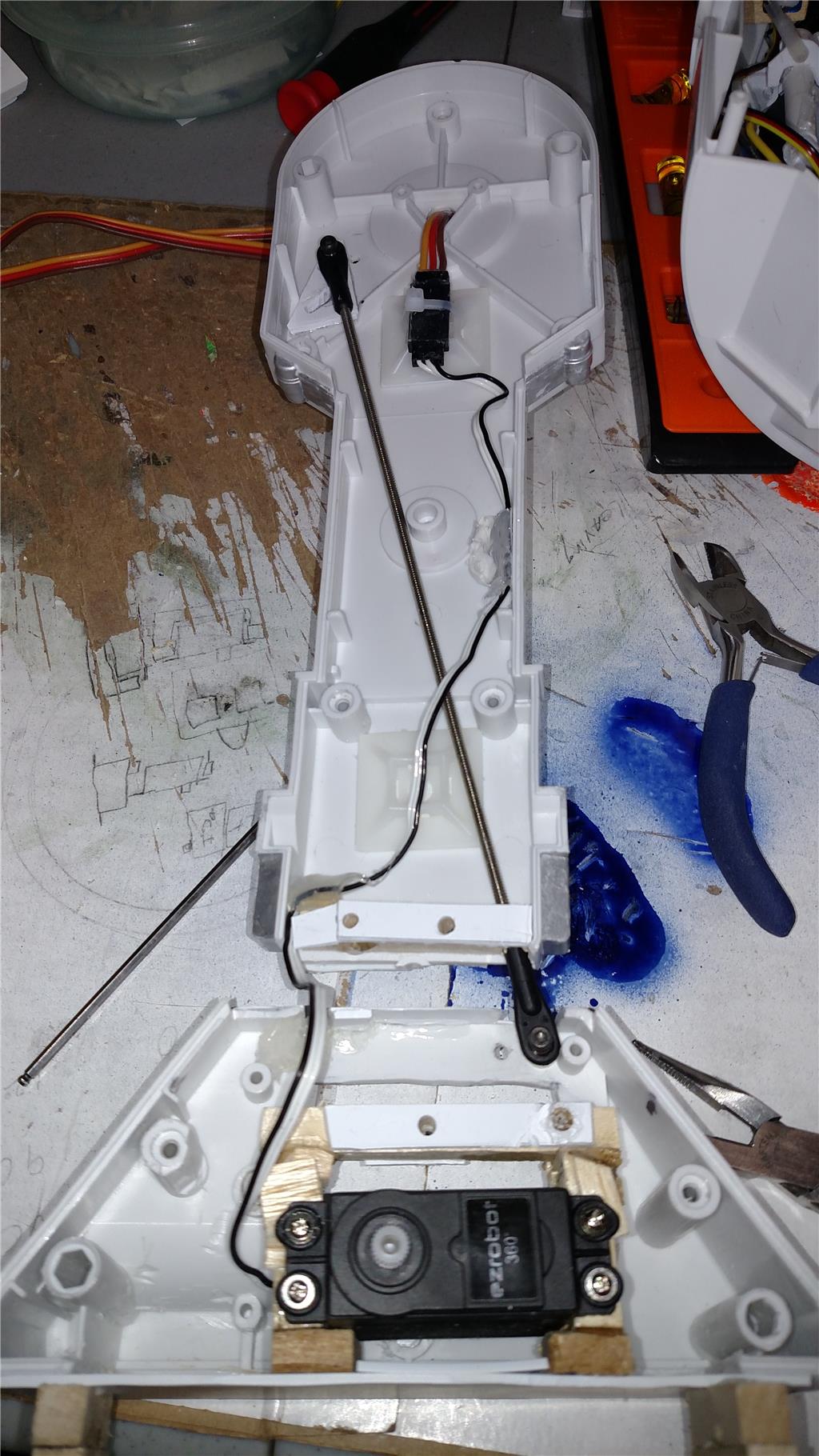
Update: 03-13-2018 Had an epic fail this morning. I have gotten to the point where I was ready (so I thought) to test R2D2 physical movement. I got him up on all three feet and then the legs would not tilt backwards. So I physically moved them to the right position, then I put him on the floor. Started the continuous rotation servos moving forward and on leg move to the center position due to the servo, and the other leg the wheel just spun. I knew there would be some issues. But really ! Anyway I have to move the continuous rotation servo wheels down toward the floor, so that more of the wheel makes contact with the floor. Have to get the foot tilting movement to keep the foot flat on the floor when leg is tilted back, and have to tinker with the leg tilting servos for a better mounting solution. Currently they do move a little and that is the issue with the legs not tilting. No video of the fail, but a couple more still photos of other items that are mostly completed.
If anyone has suggestion please feel free to let me know. Always looking for good idea's.
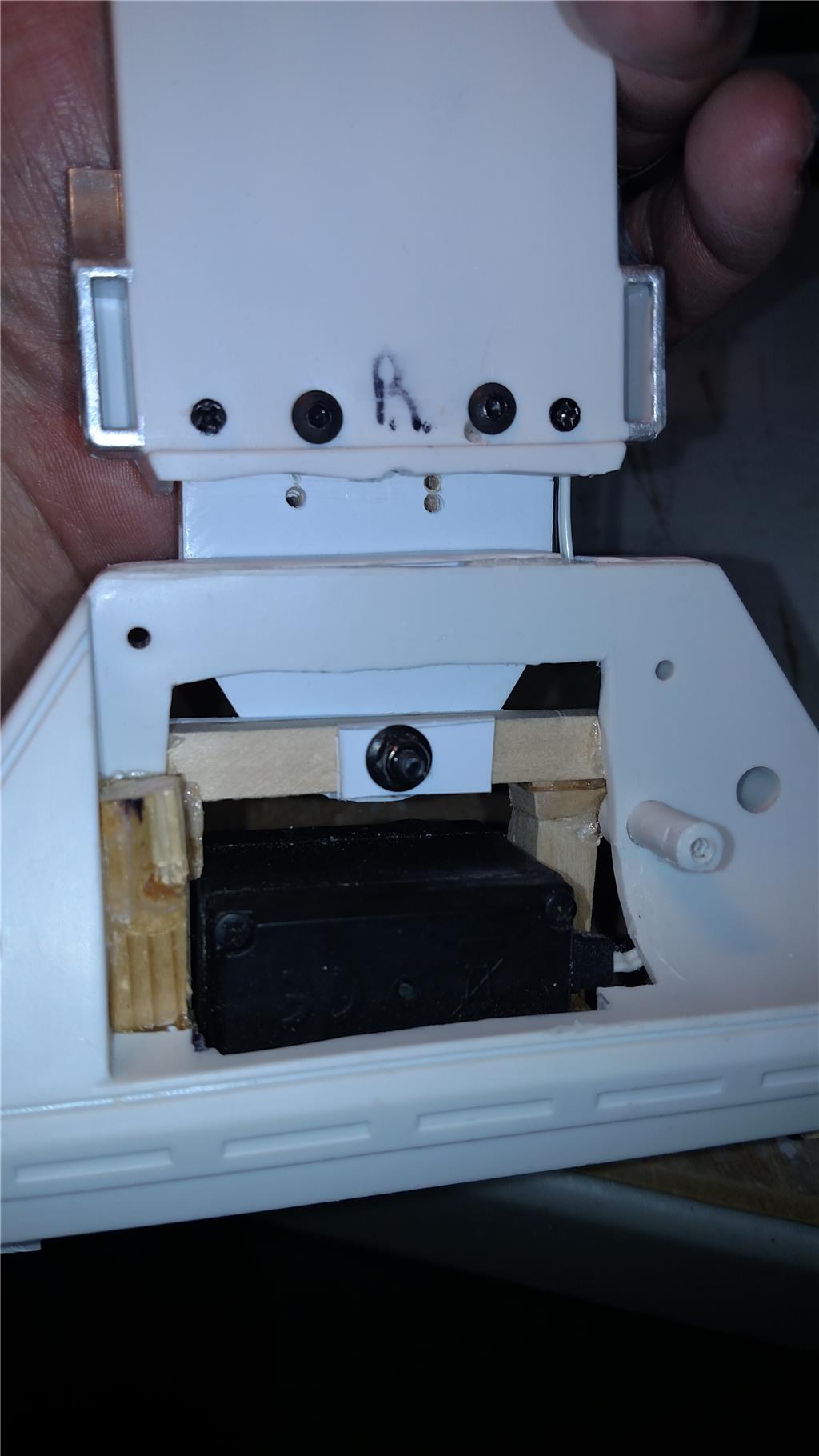
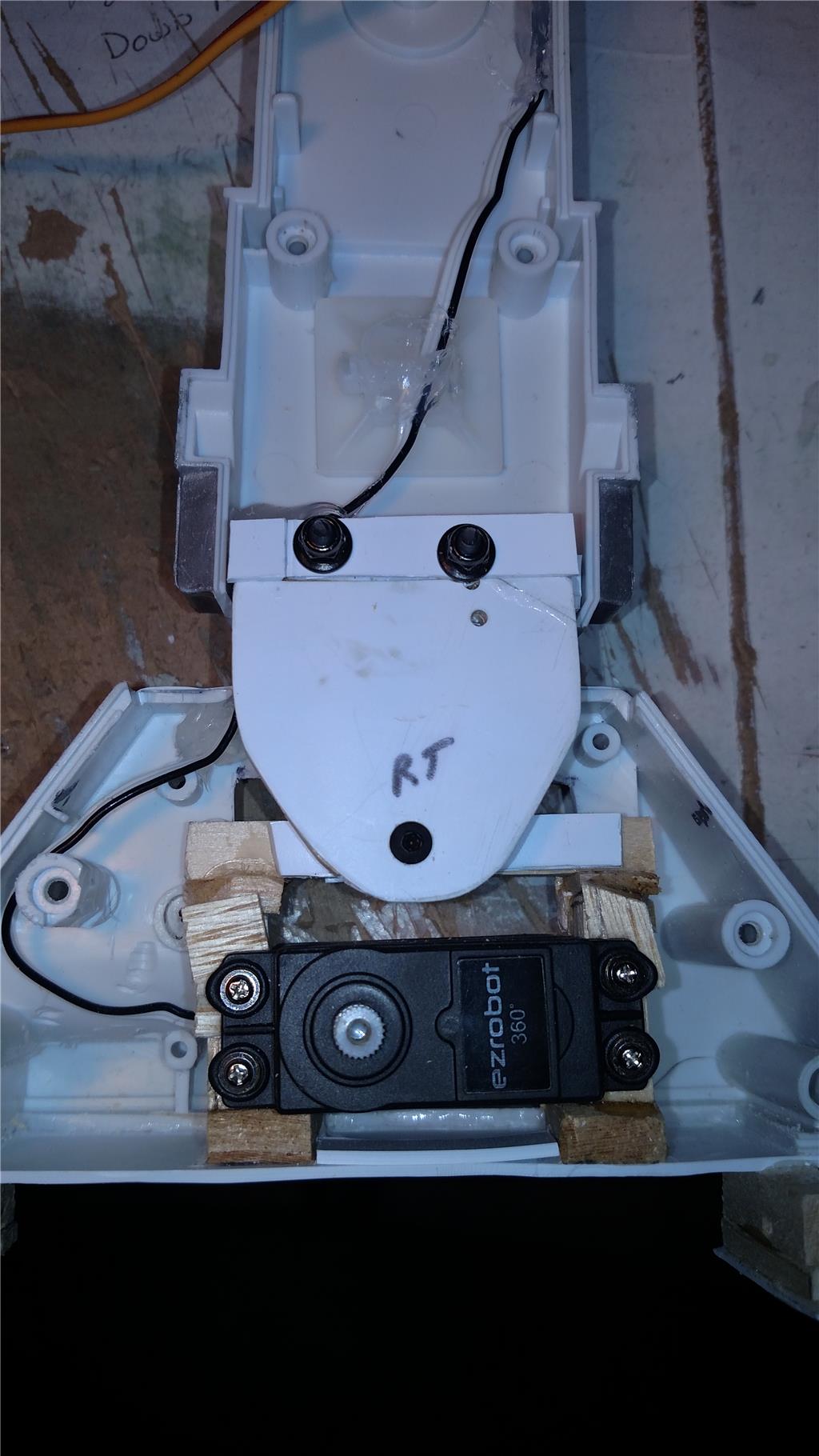
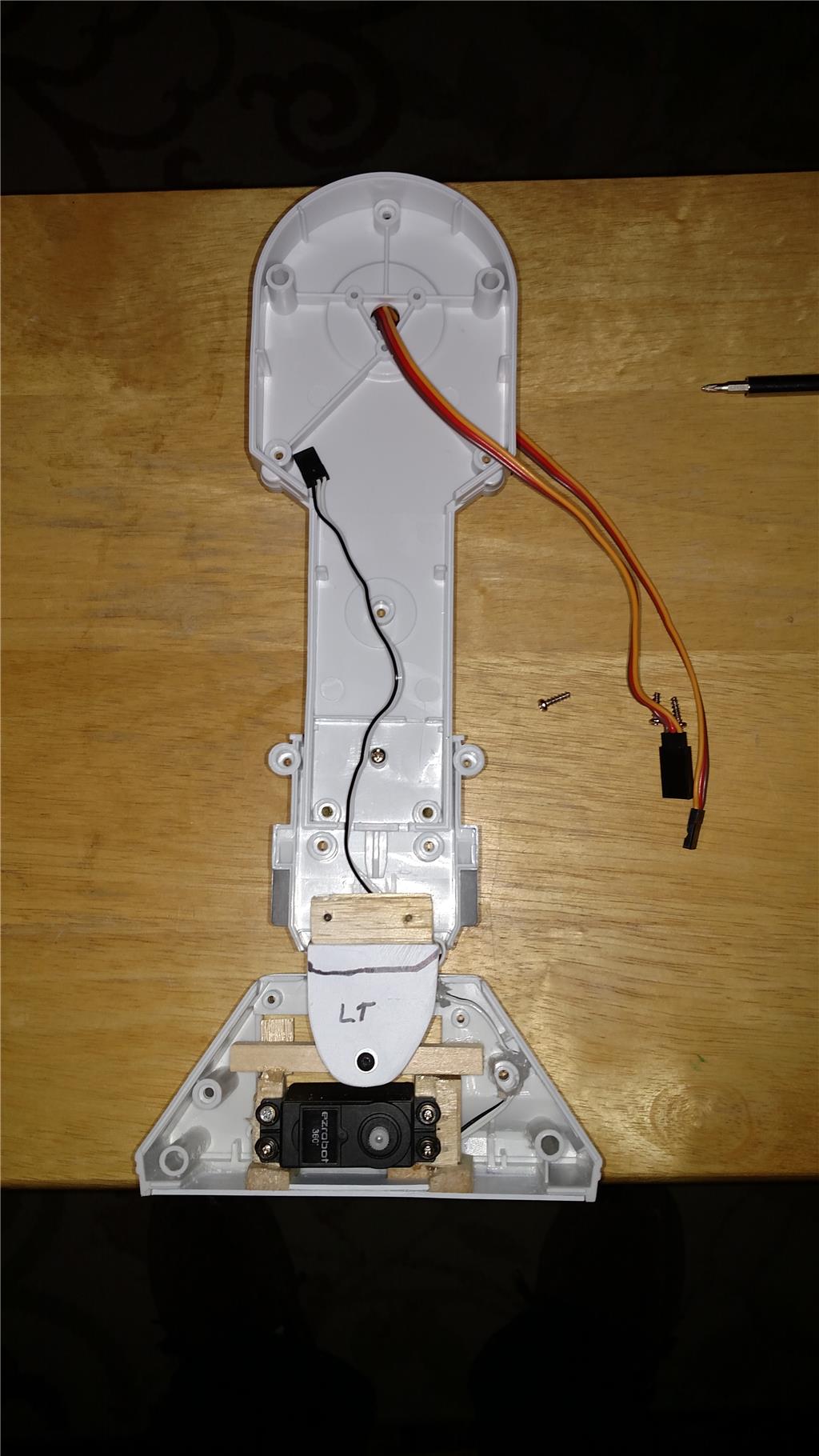
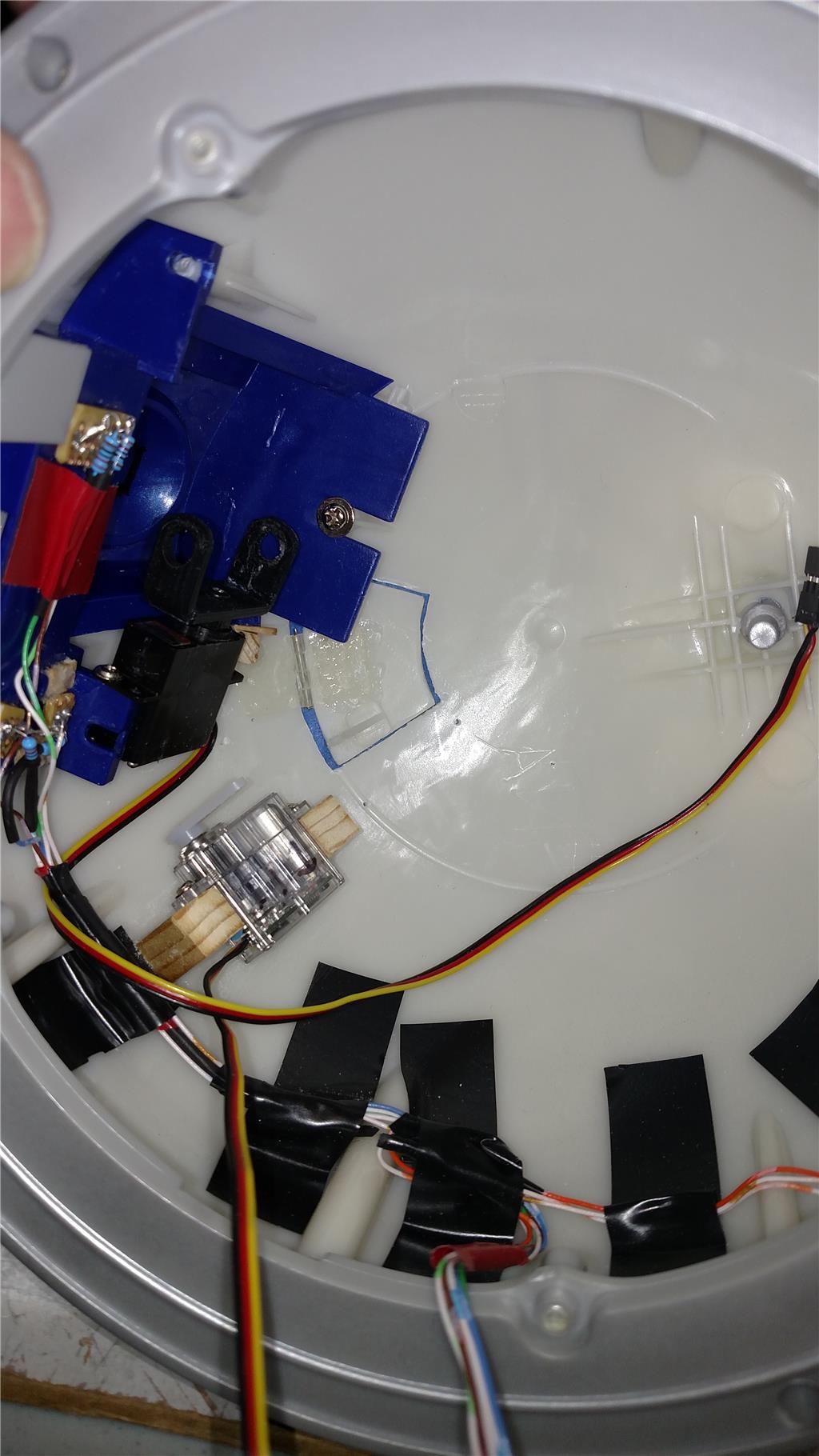
Update: 03/16/2018 I am done reworking leg servo mounts, the connection between the leg, ankle, and foot. I finished the right leg then put it on R2 and tested it. The leg tilts as expected, although with a lot of servo noise. It must be having trouble with the weight of the foot. I have to release the servo or press the panic button to cut the power from servo. I also need to clear a little more material away from the feet so I get the proper tilt when the leg is back in position for 3 legged movement. I have also finished the left leg, ankle, and foot. Set it up the same as the right one. @AndyRoid I borrowed your idea about putting the servos on the foot floor. It seems to have worked out better, as I have a lot more wheel touching the floor. I now have to adjust the front leg/foot to lower it down to the floor by 5/16th of an inch. Once the front leg/foot is completed (tomorrow) I can test him to see if the physical movement works. I have to come up with some type of connecting rod from inside the leg to the foot that controls the tilting of the feet when the legs go backwards. I saw this rod setup on a full size R2 and it worked great. The feet were stable no matter what position.
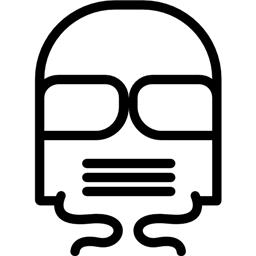
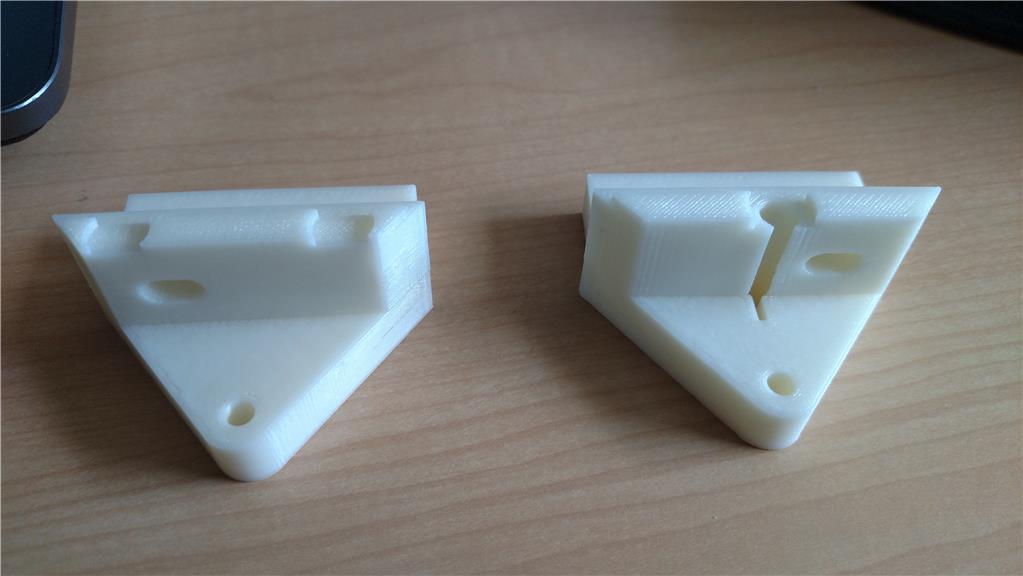
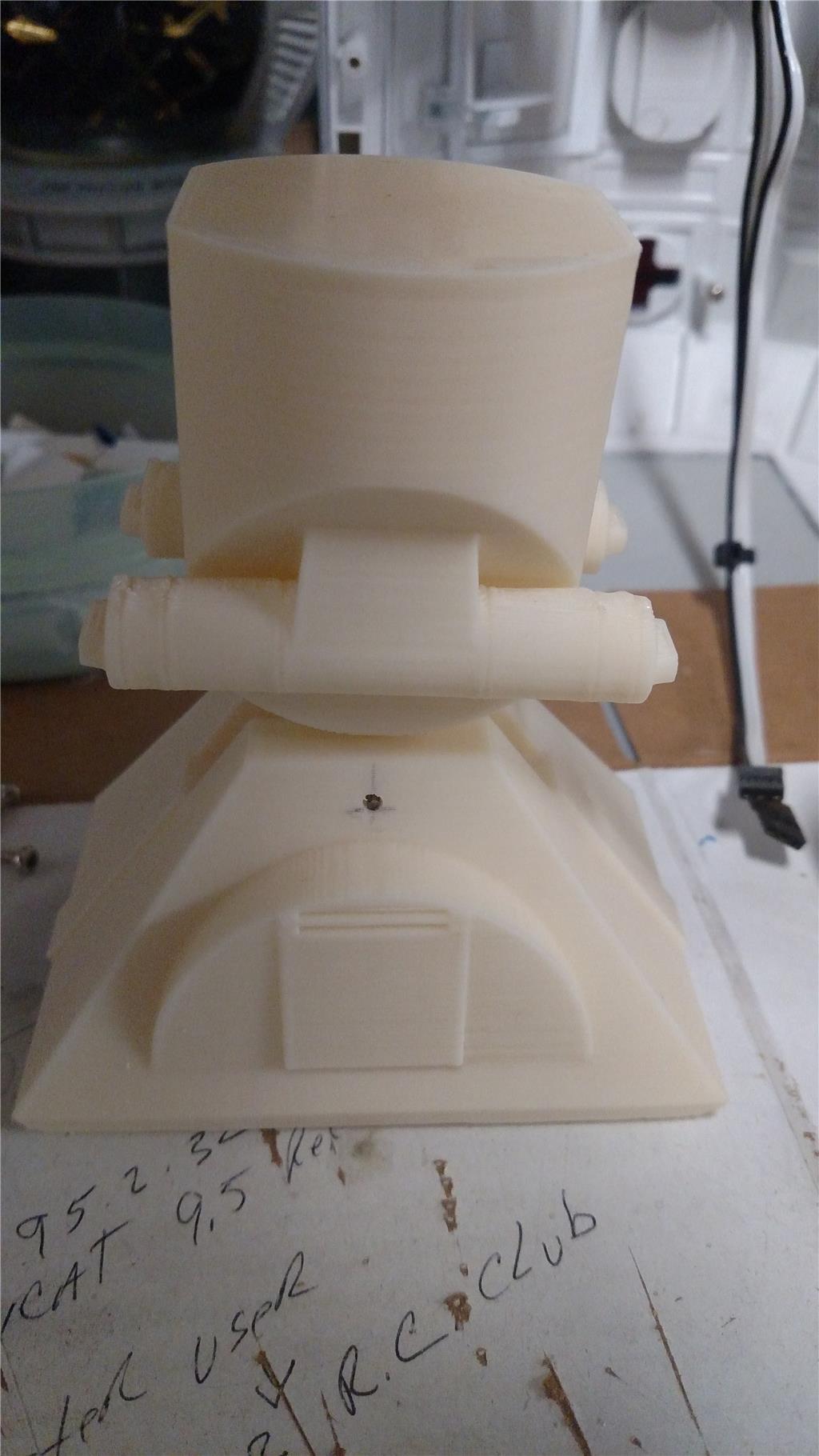
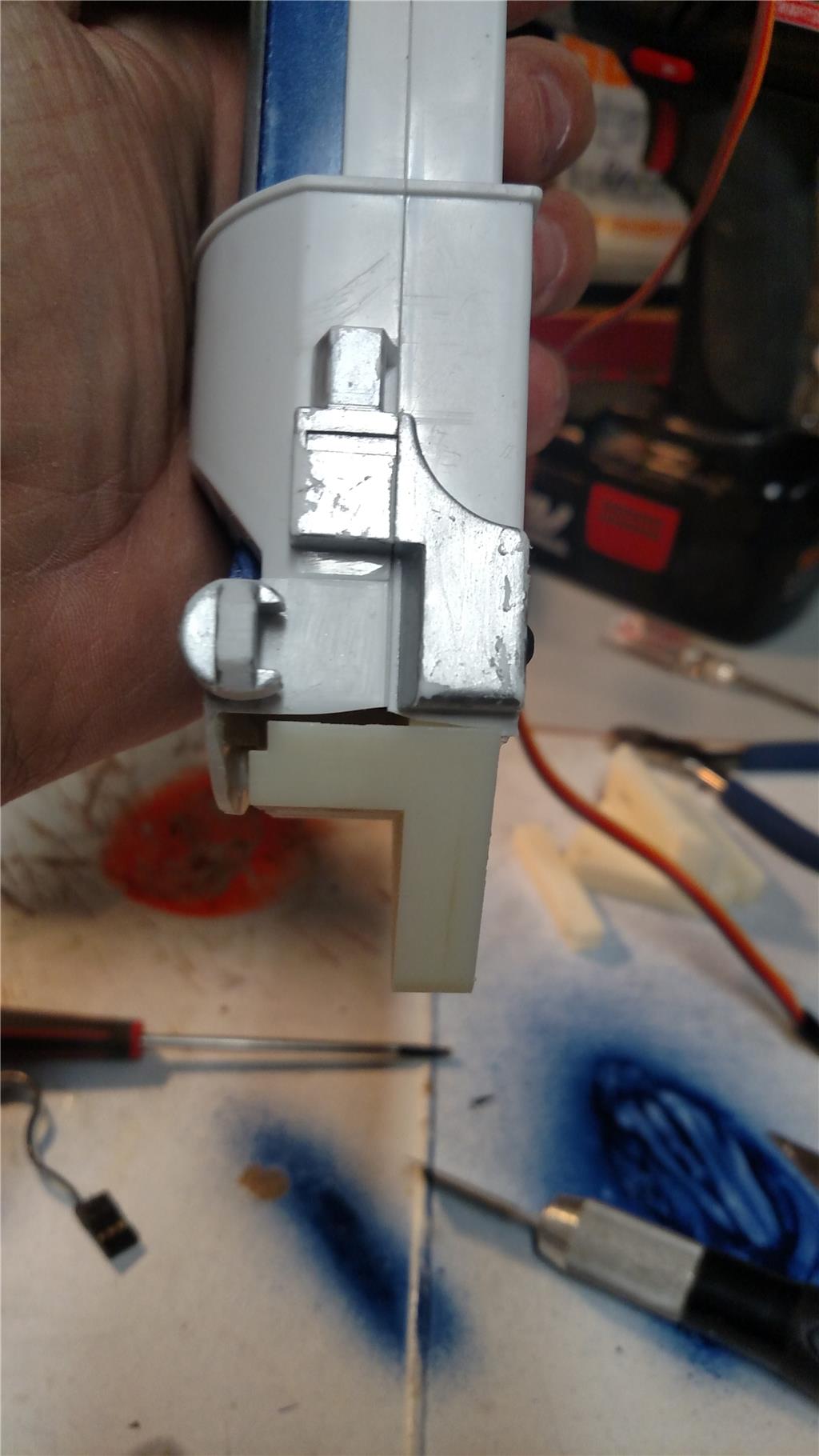
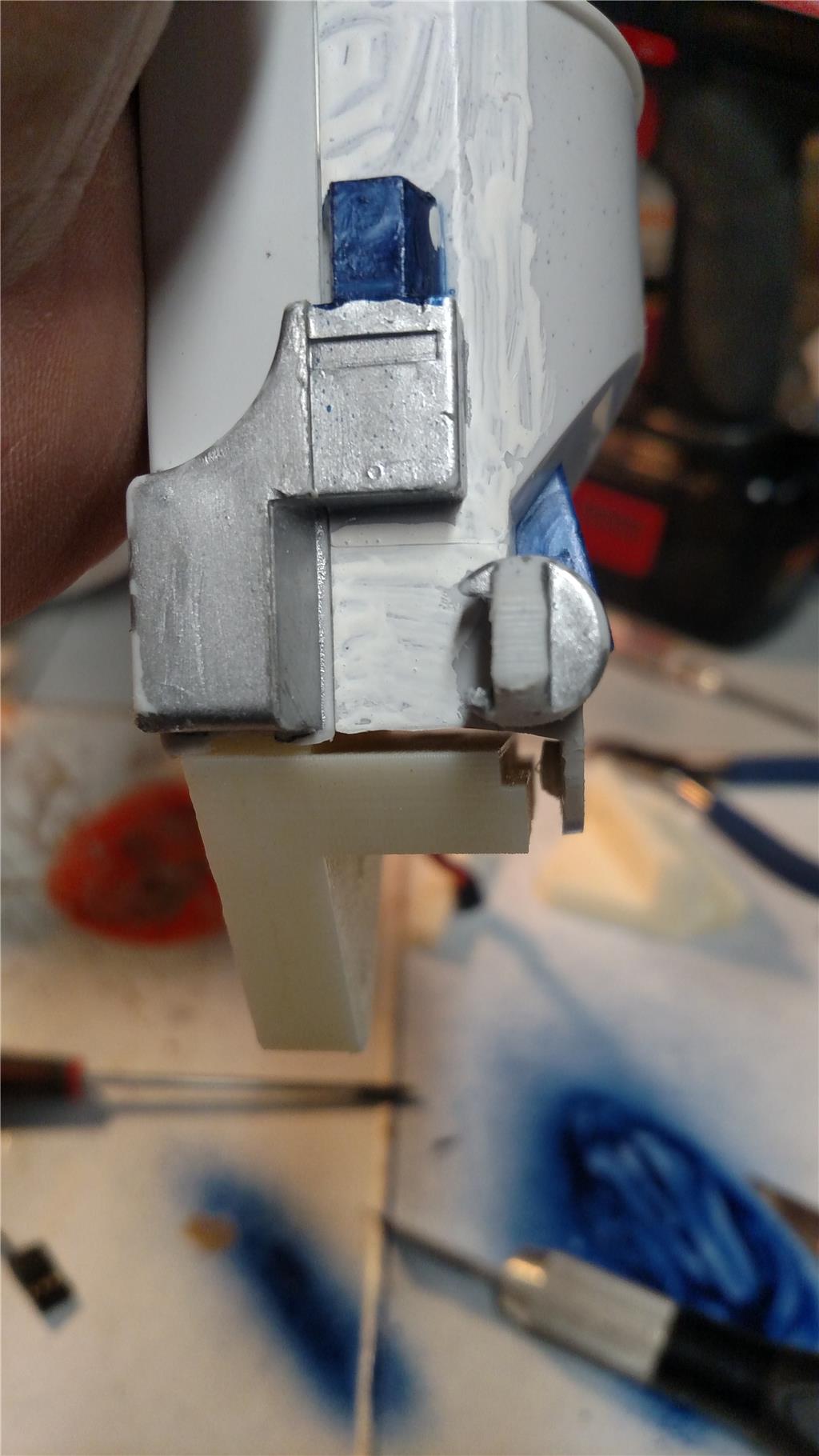
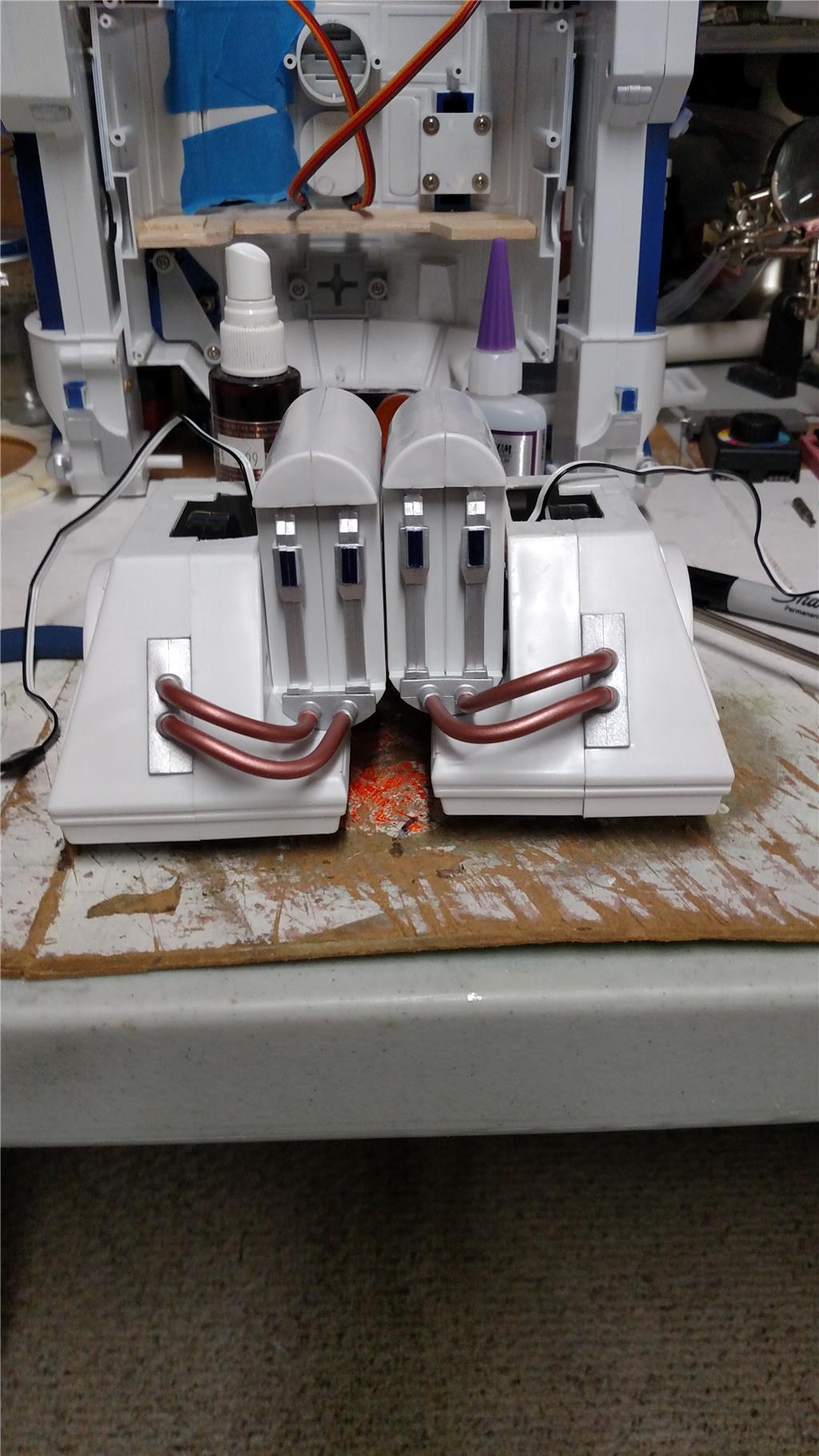
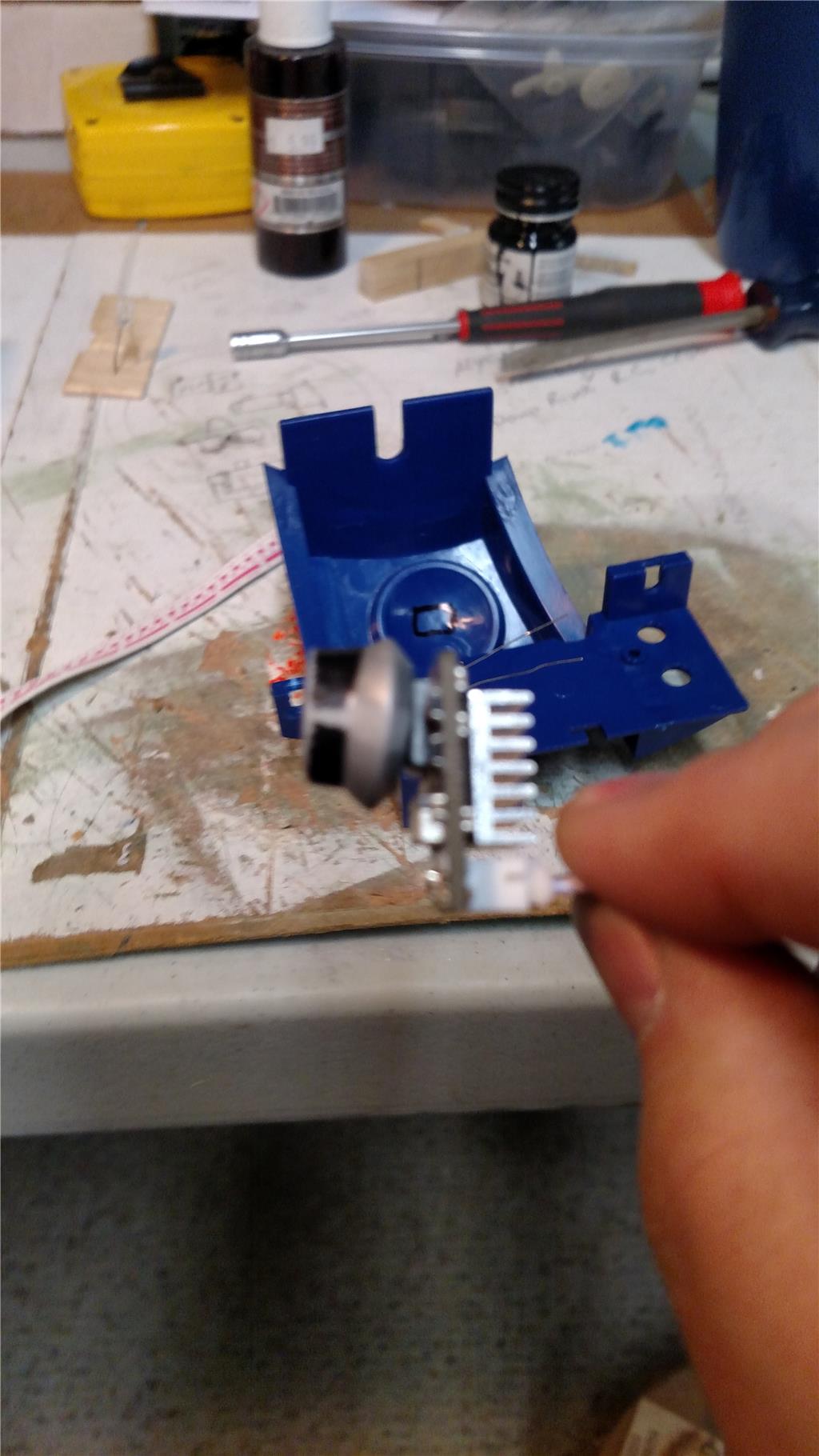
The photos below are to show the pieces I came up with (look similar to the full size R2D2) to allow the ankle and feet to tilt.
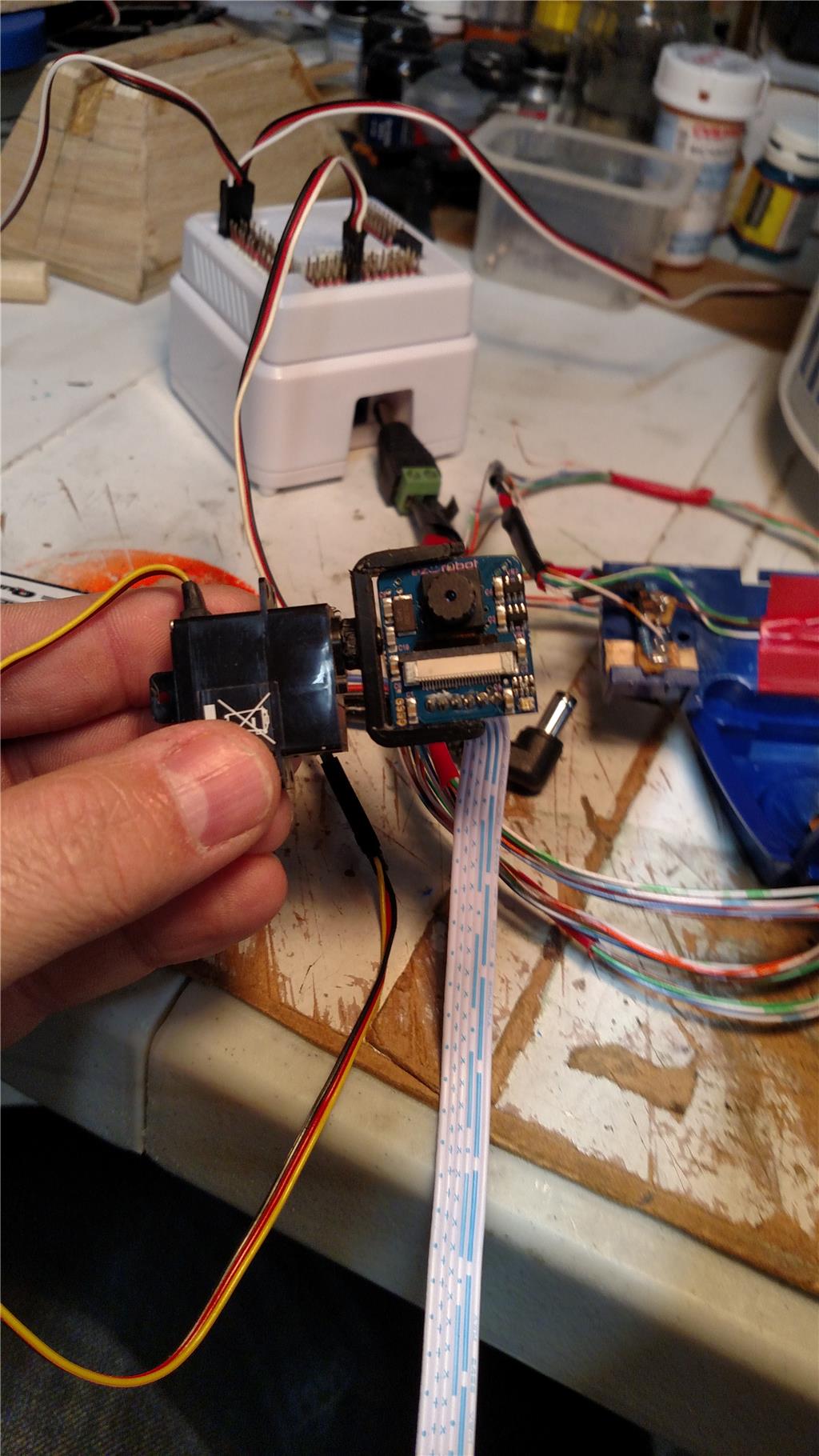
I've got a question, where would someone connect a mic to the EZ-B to take the place of the computer mic ? With my R2D2 project I will not have the computer around for voice input. I have purchased this mic (MAX9814) with build in amp and adjustable gain. Any help would be great.
there are some speaker to get that works as a speaker and mic same time, excample the NAO robot and ez robot has the loTINY with speaker connection. maybe thats something you can try,just gessing.
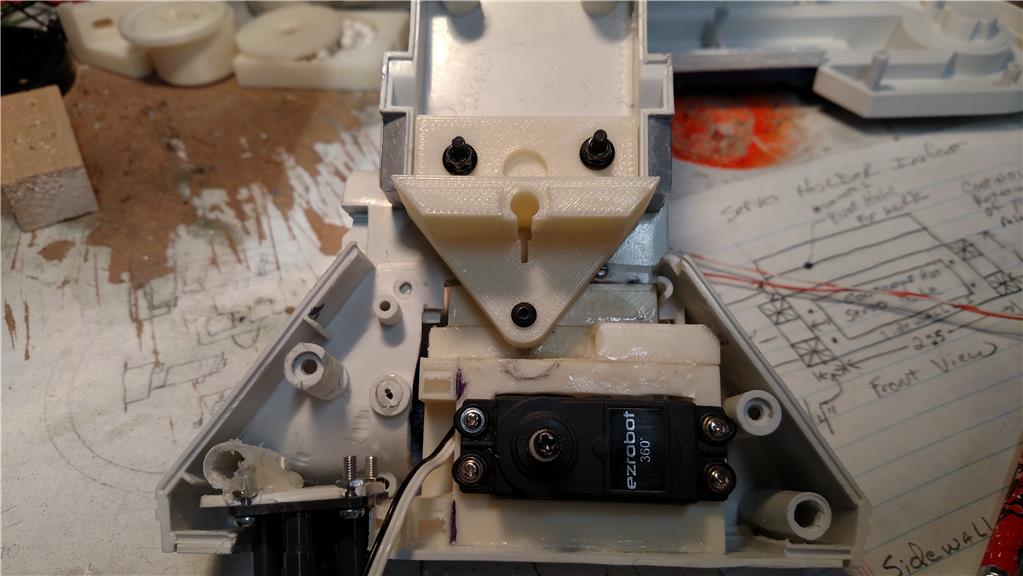
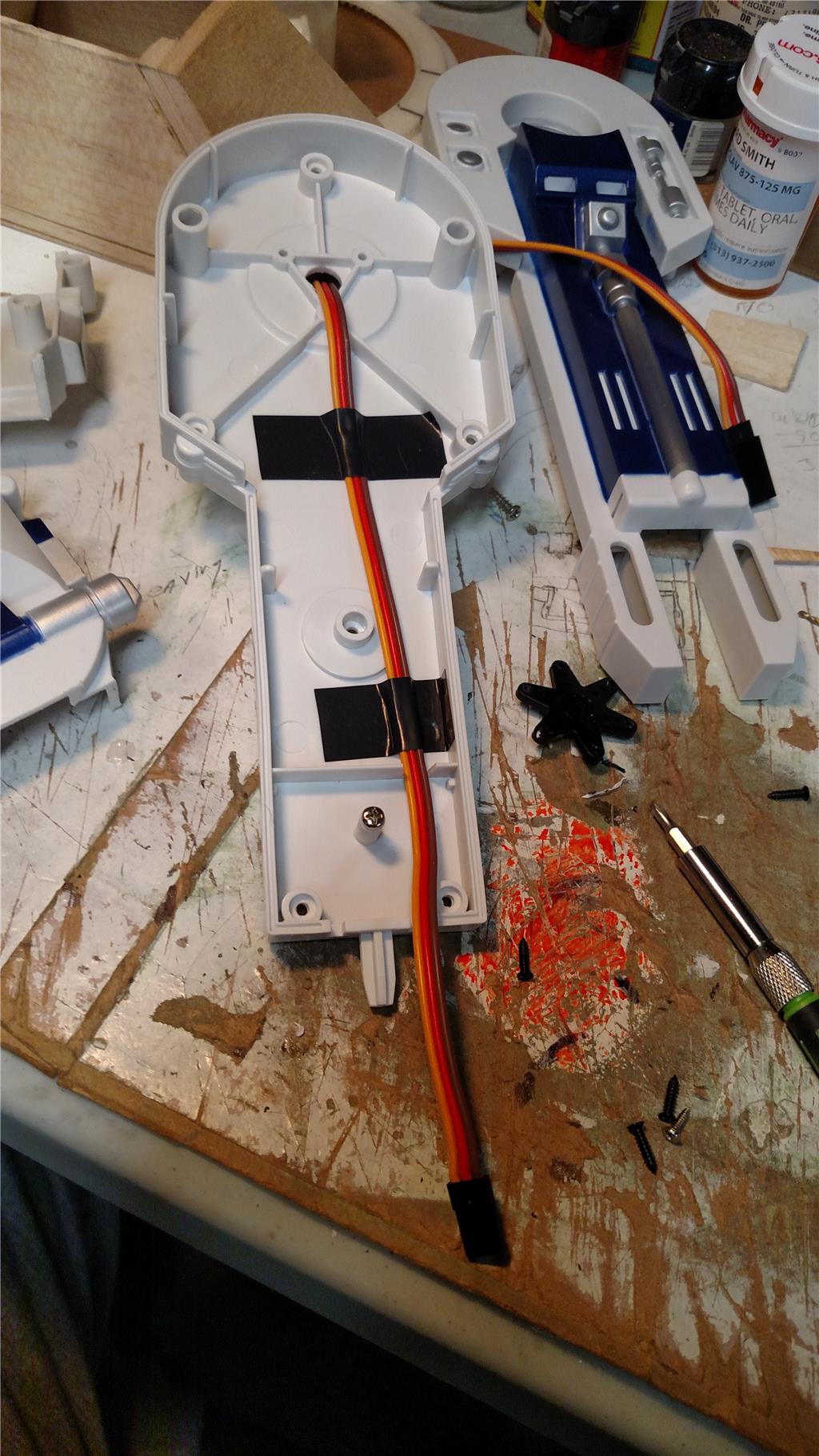
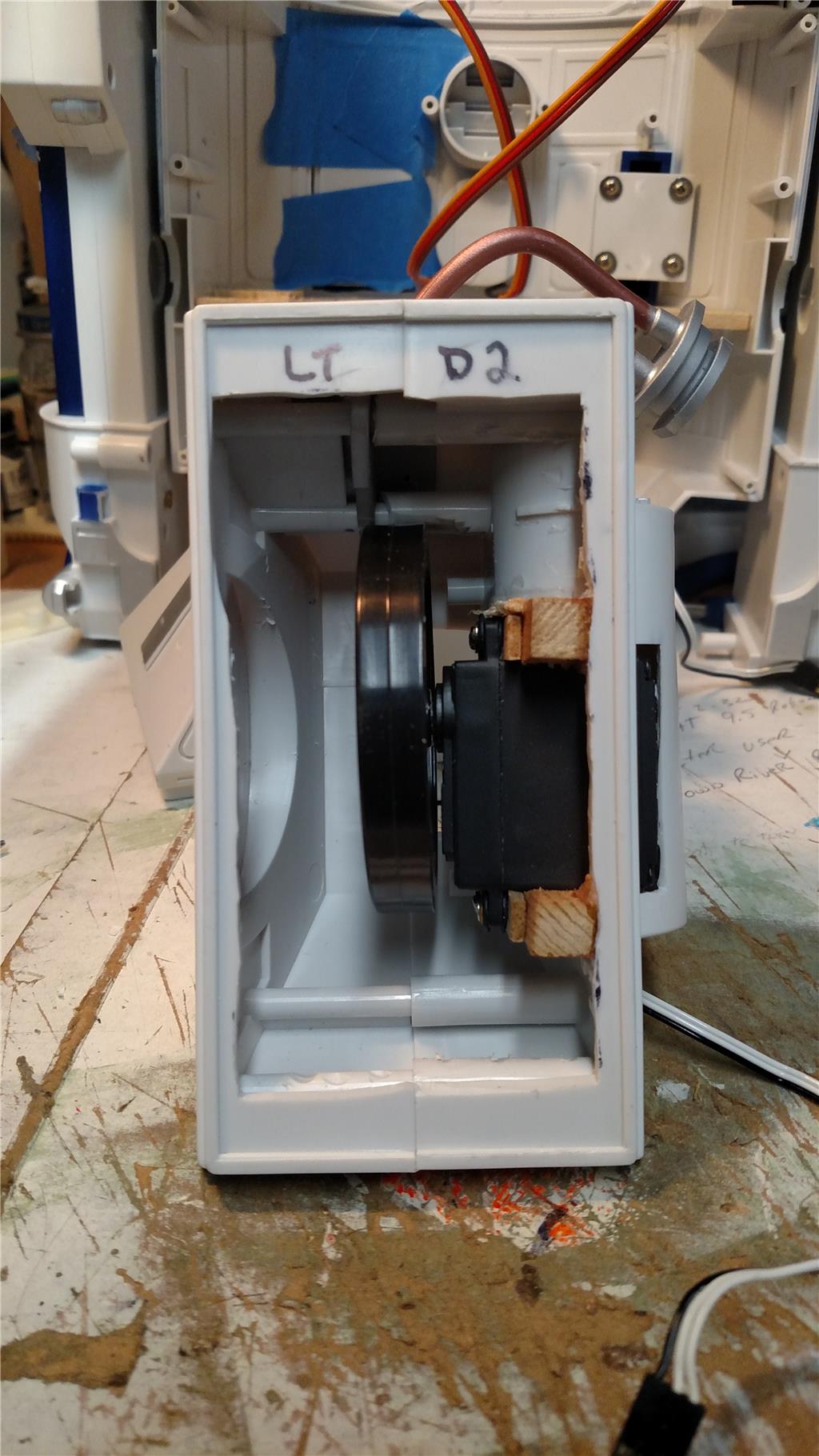
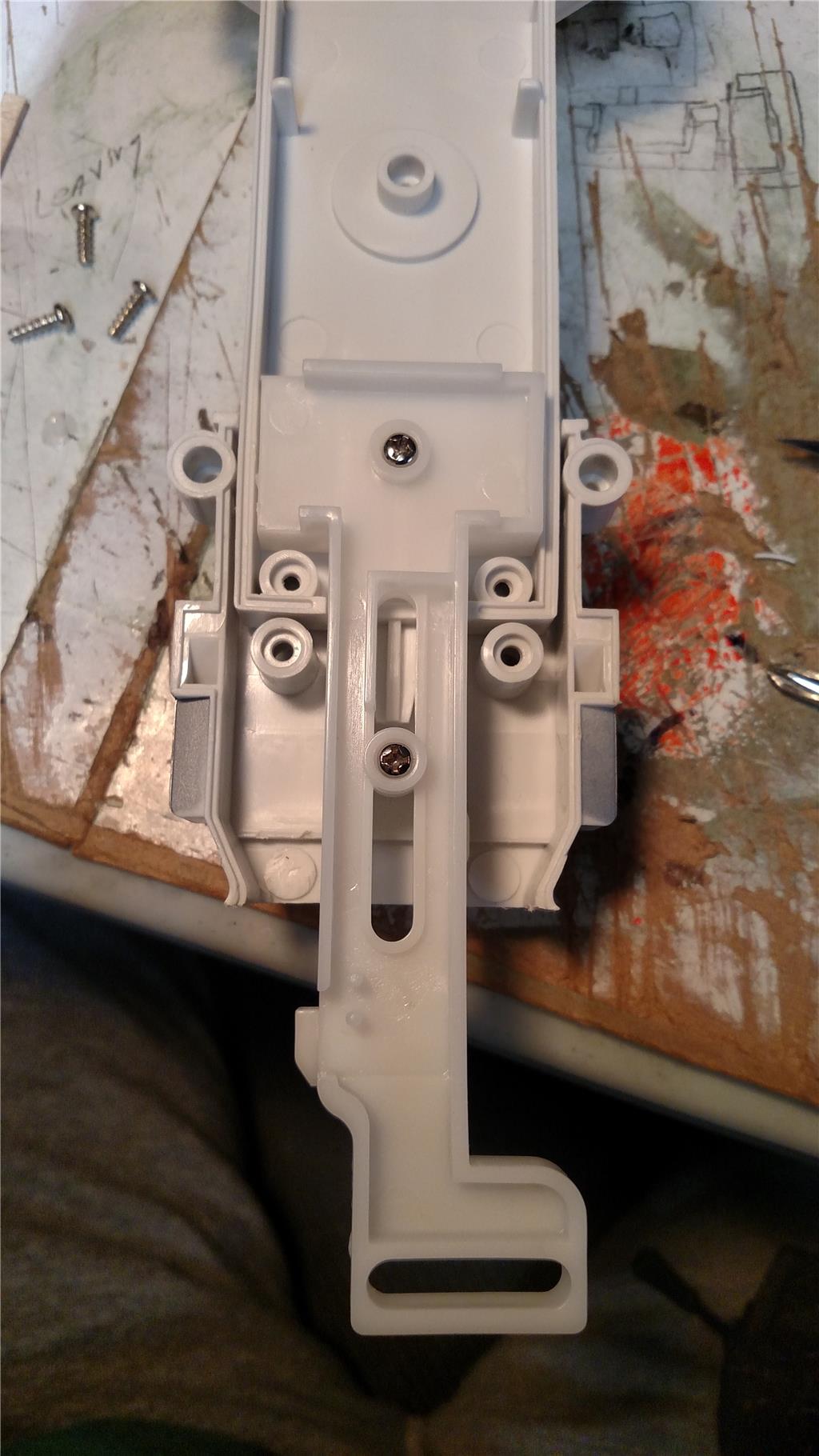
Well it has been some time since I have posted. I have rebuilt my leg/ankle/foot assemblies 3 time now strengthening and adjusting it each time I rebuild it. I have finally gotten almost all of the tilting/angling out of the leg/ankle joints. I have seen an issue with using just wood for these joints. The wood mounts where the ankle joins the foot were getting crushed by over tightening the screws. I have resolved that issue by placing 1/16 inch plastic in front of all the wood mounting areas that use screws. Works like a champ. See the photos for more details. I have also added a 3rd working dome door on R2's head. Only 2 left to go. These are the ones with the periscope and the LFS (Life Form Scanner) I have found some linear servos that are strong enough for this task. They are $70 each, I haven't purchased them yet. I also need a PIR sensor from ADAFruit for the Wake on Movement function. I should have this sensor next week and can get that programmed. I have been working on the 2-3-2 transition. Current my R2 will go from 2-3 good but when I go from 3-2 he falls over. I have added a battery tray to keep the battery from moving and he seems much more stable while standing. See pictures for the battery tray. I still need to design and construct the slide assembly for the center foot. Currently the center foot is stationary in the down position. I have the programming worked out, just don't have the assembly built. That's it for now.
very nice build.did you use the little metal tubes for the rubber in the servo, where the screw go's in?
Thank you @Nomad 6R . I sure did. I put these in upside down. The rim is on the bottom so as to spread the down force to a wider area of the wood. This helps to prevent crushing of the wood.