





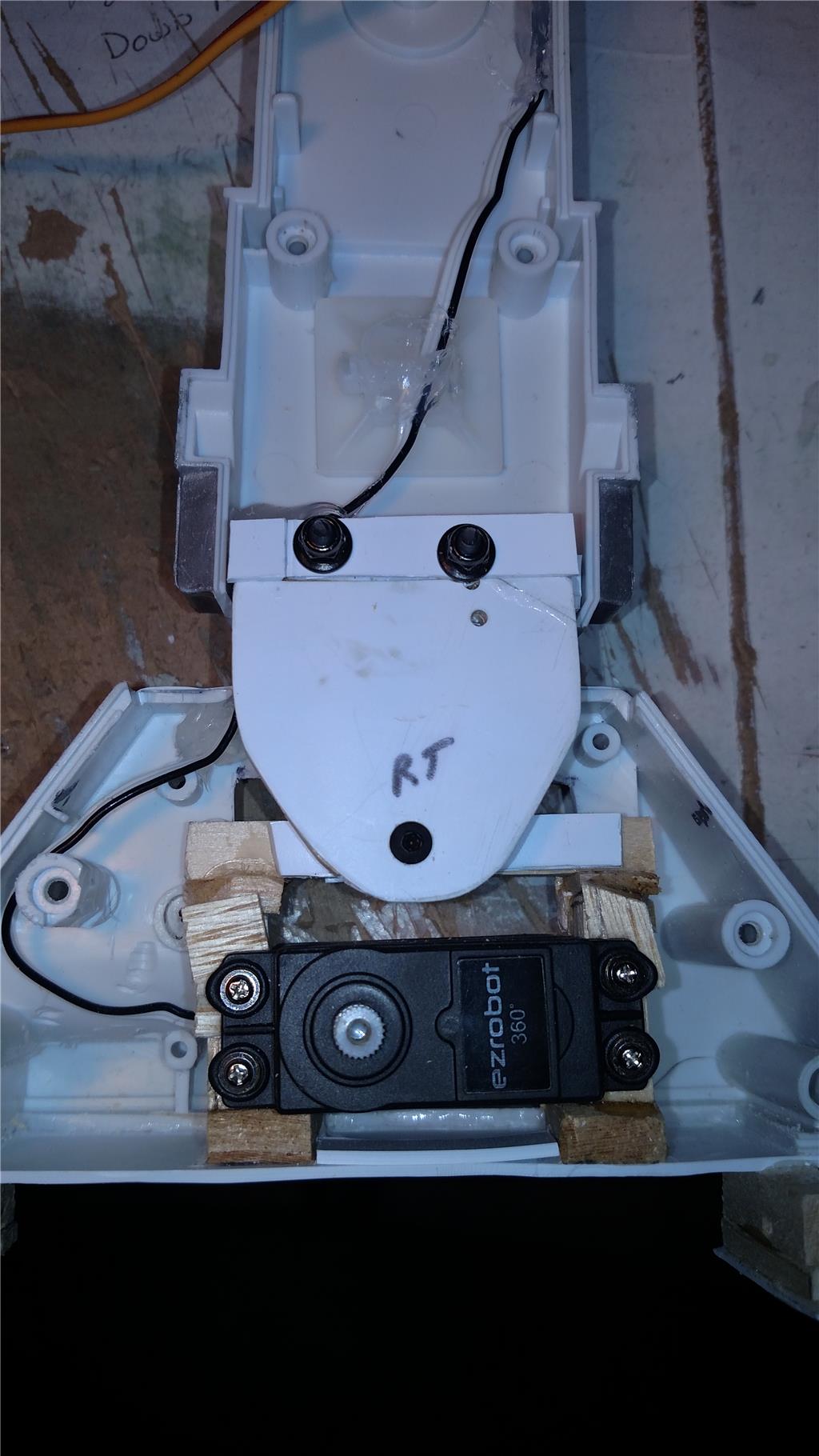







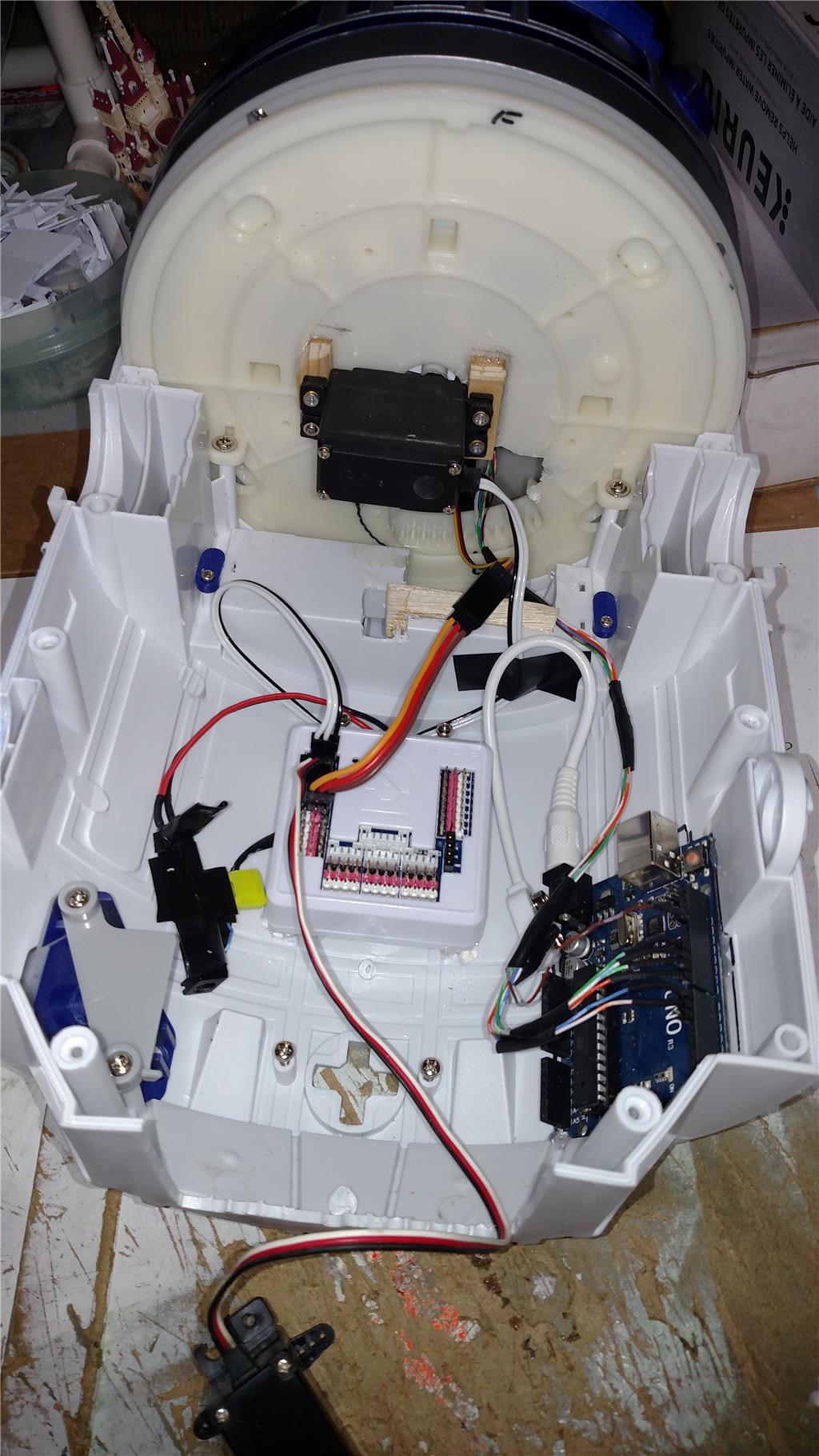

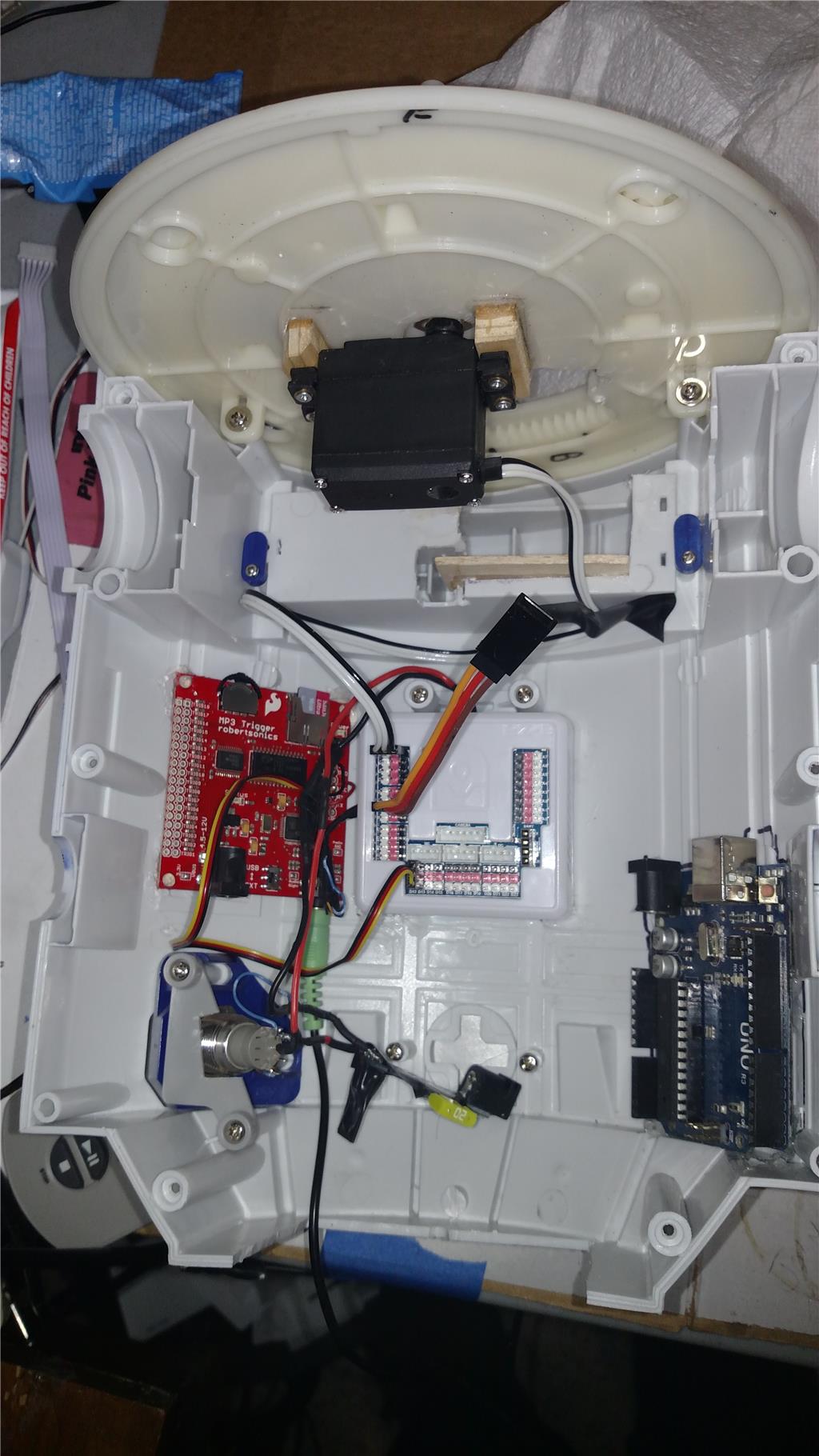

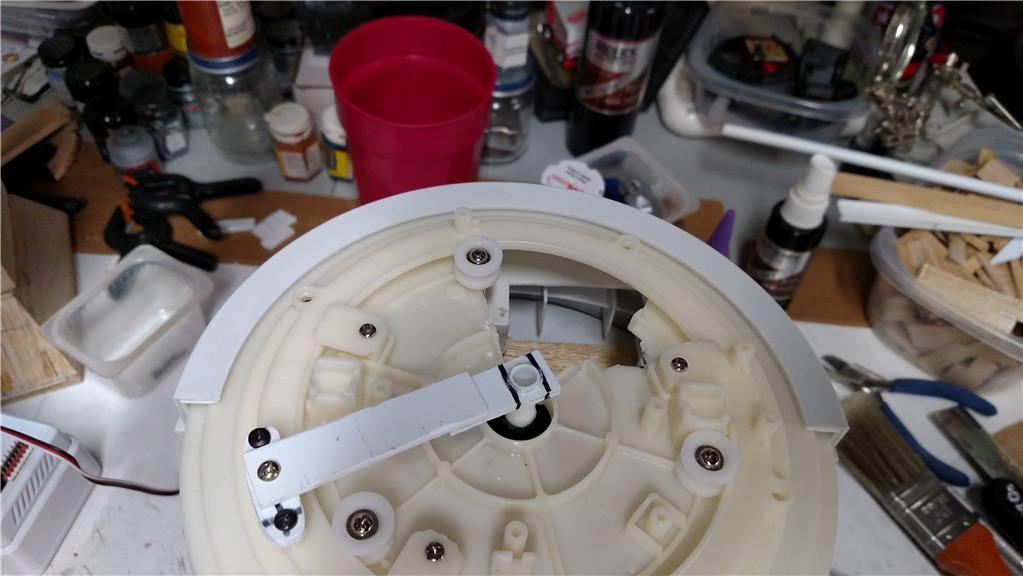
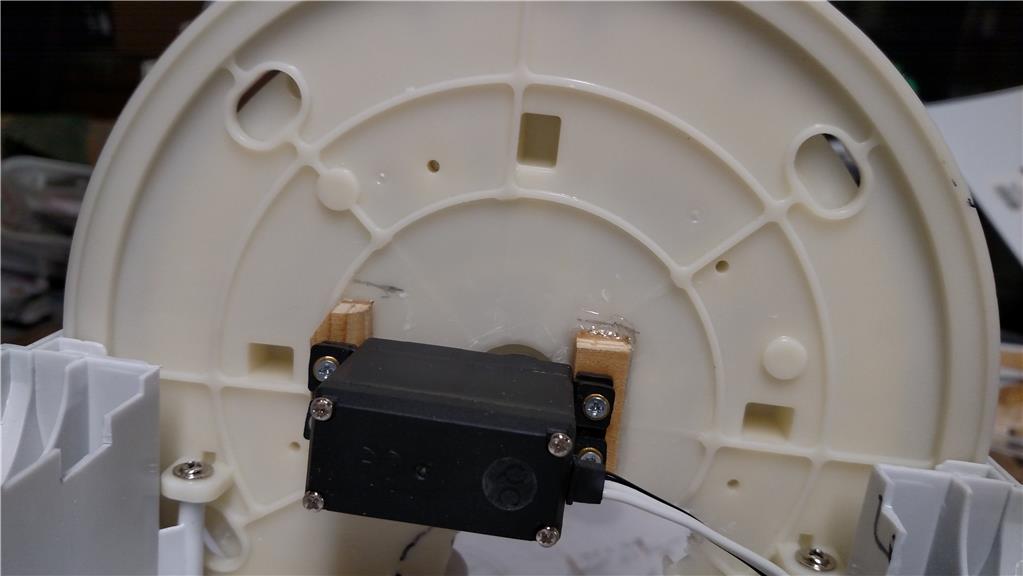


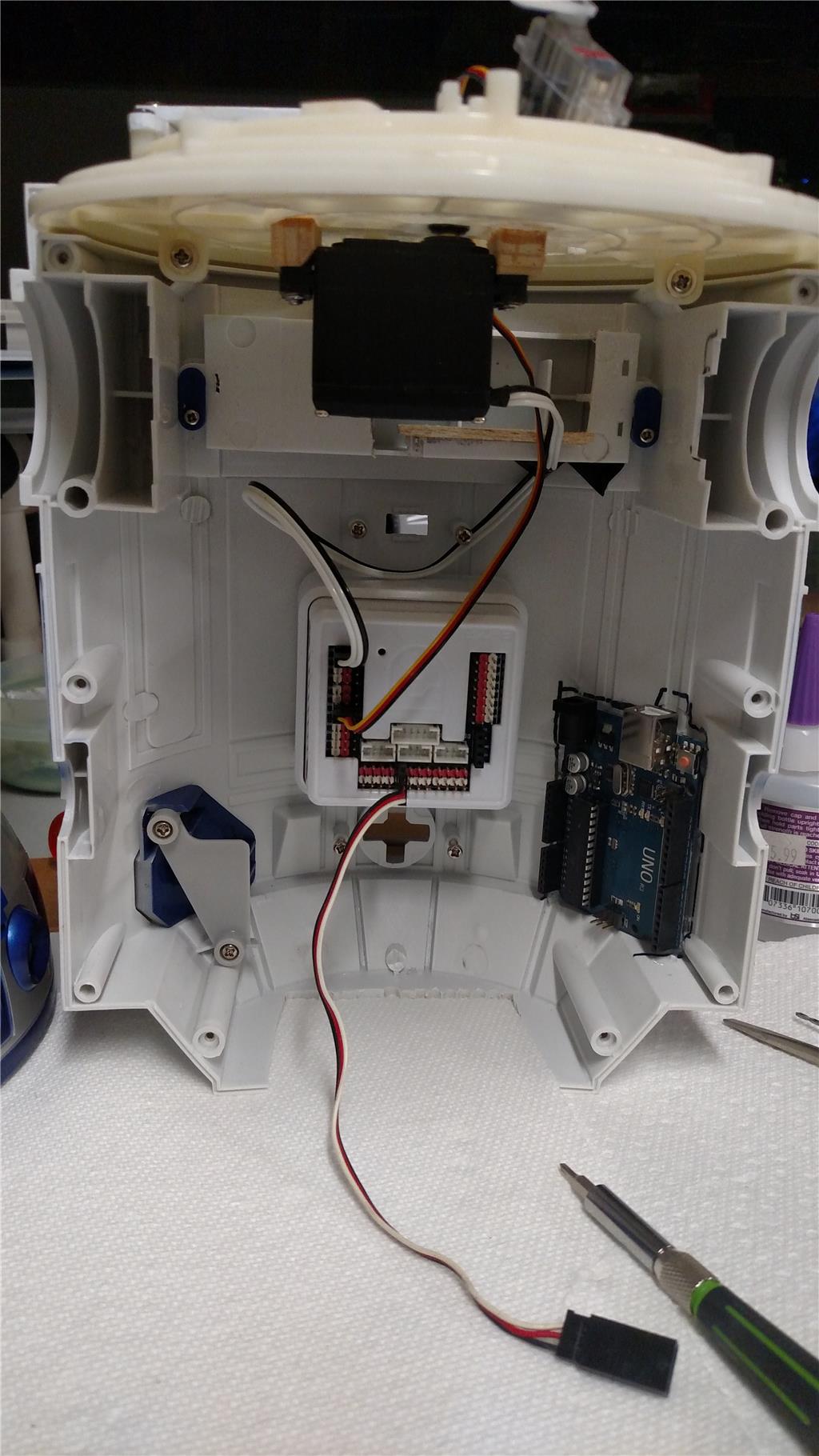
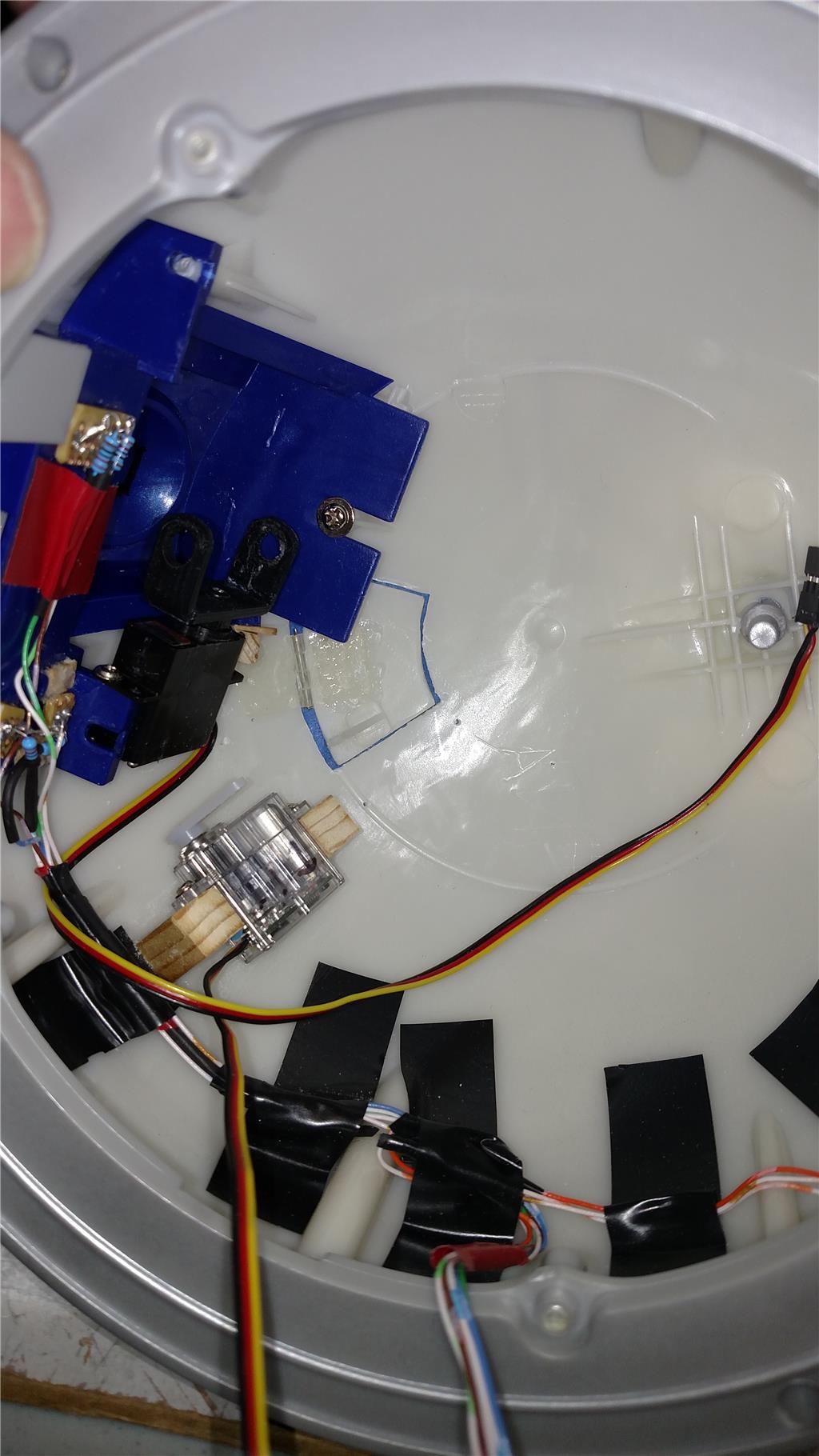









I am currently working on an 18 inch tall R2D2 that was purchased from Toys-R-US. This R2D2 had no electronics in it at all, just a pose able plastic model. It has a simple lazy susan type setup for the head movement. It has an upper gear and a lower plate. I put a EZ-Robot 360 degree (continuous) rotation servo in for the gear to rotate the head. The problem that I am having now is that the continuous rotation servo is difficult to stop at a give point, say 90 degrees. This faces my R2D2 head to the front. How would I control it like an Auto Position control, yet get the 360 degrees of movement out of it. with the Auto Position control I only get 180 degrees of movement. I am on a tight budget (unemployed) and am using what I have at my house for most everything I want to do with this R2 unit. The issue that I am having with the Auto Position is that once it hits the point it should stop, the servo keeps going until I hit the panic button to stop it. The stop button has no effect. Any idea's would be helpful. I have been programming with the EZ-Robot for about 4 months, but have programmed for 6 years with legacy software.
Regards, Richard
Discover more robots

Bhouston's A New Dof For Inmoov's Neck/Head

Sulla's R2d2 Bb-8 Mashup Robot Project

Update: @rz90208 I really don't have any stl files for the hinges for my dome. Each one is slightly different. I am trying to standardize on a hinge design, it would make life a lot easier. Once I standardize I will create the stl files. I have used all sub micro servos from Hitech the HS-55. I have gotten them for as little as $9 each as high as $11 each. The are an analog servo with a good amount of torque, therefore I figured they would be perfect for the job. They are some and fit almost any where. I have has to customize each individual dome door also. It depends on how I cut it out of the dome itself. I am going to see if I can shrink a dome door from a full size R2D2 to fit. Not sure how that will work out, as some 3D printed parts that I had a friend print (holoprojector parts) would not print at 40% reduction. Those parts will arrive tomorrow might so I can see what happened.
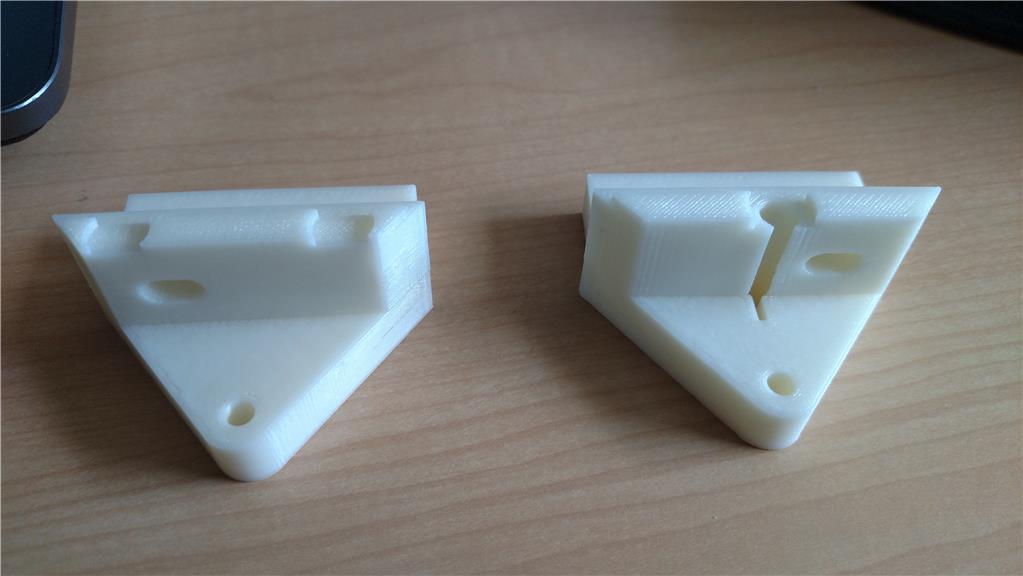
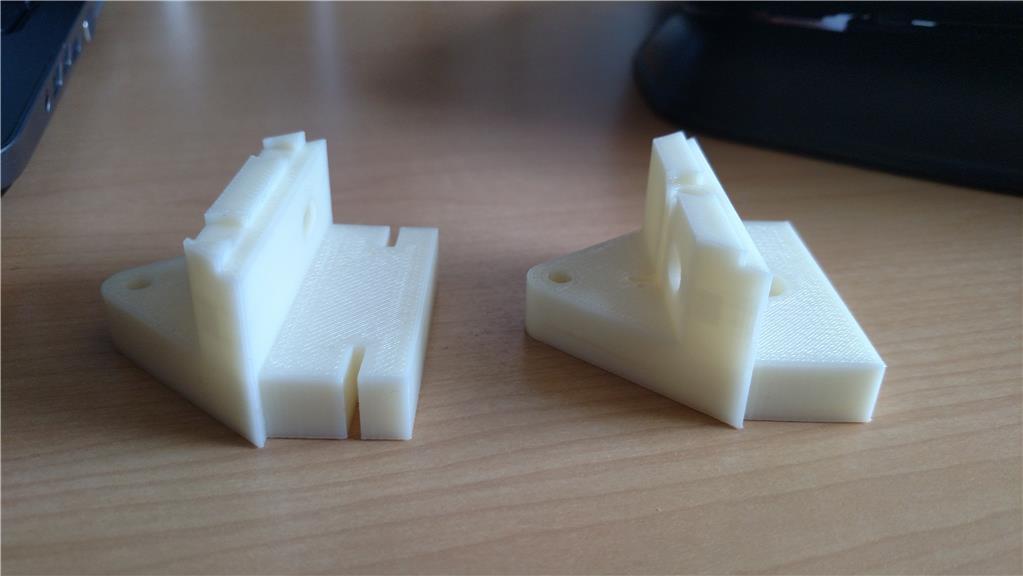
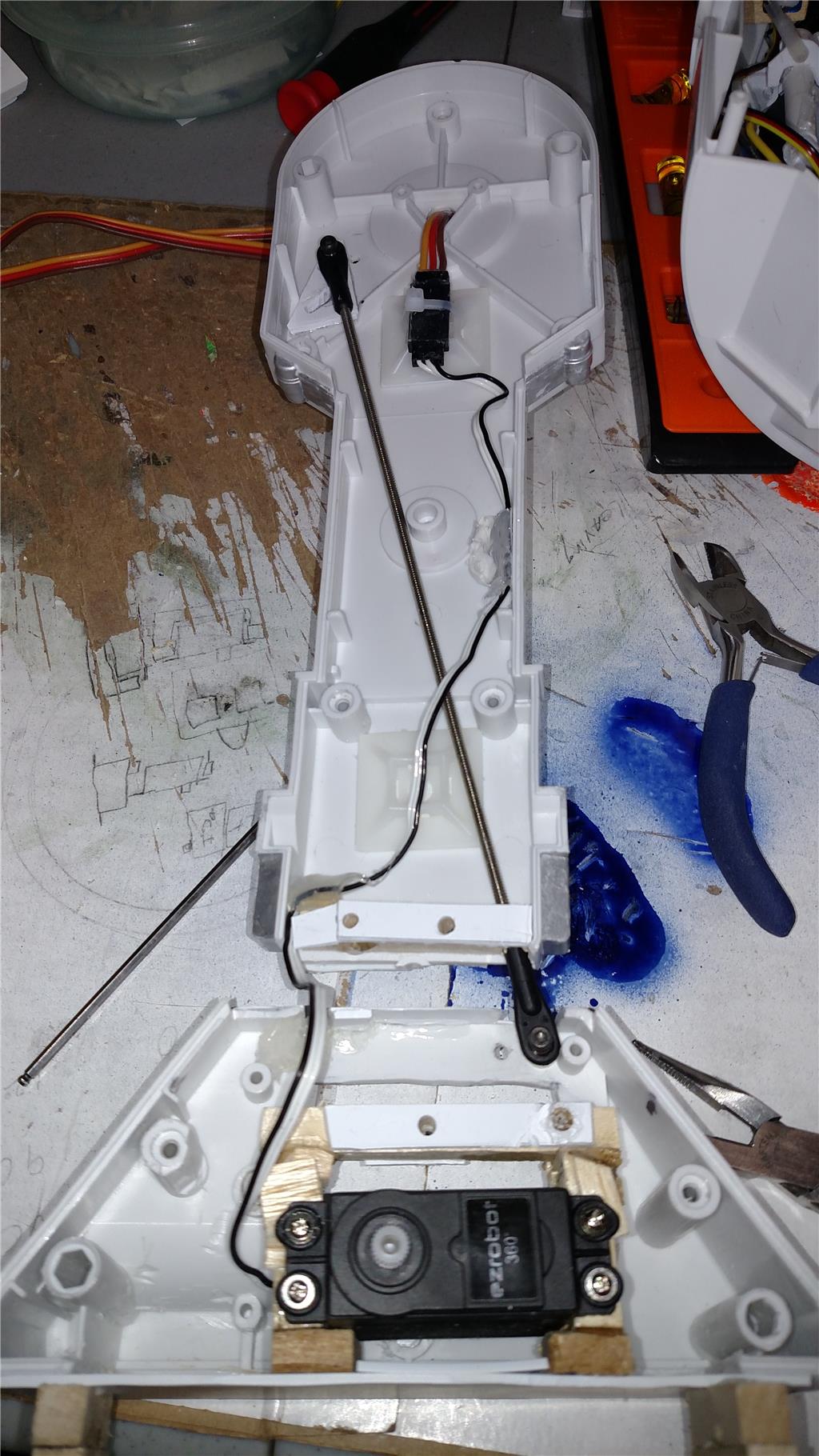
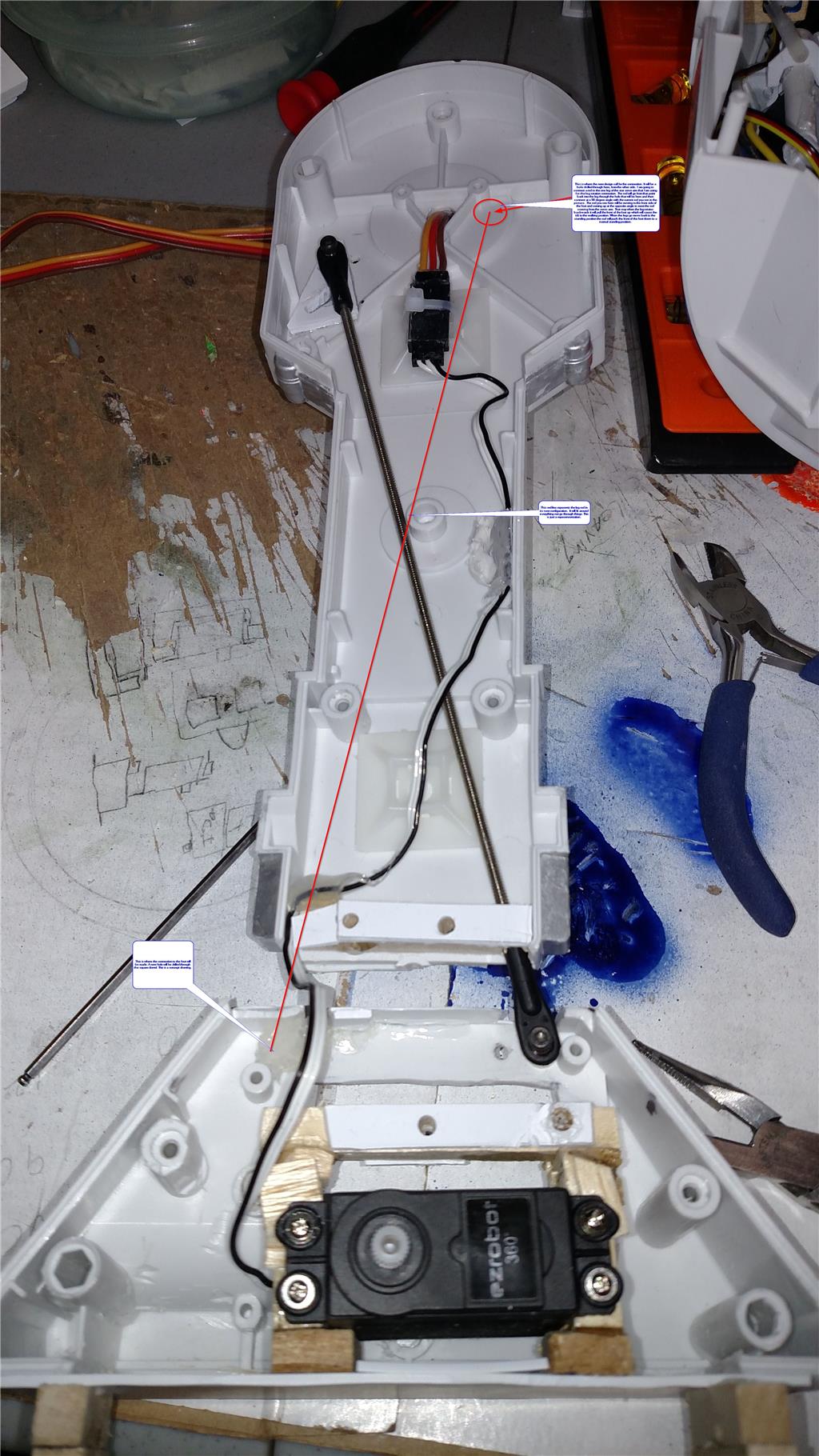
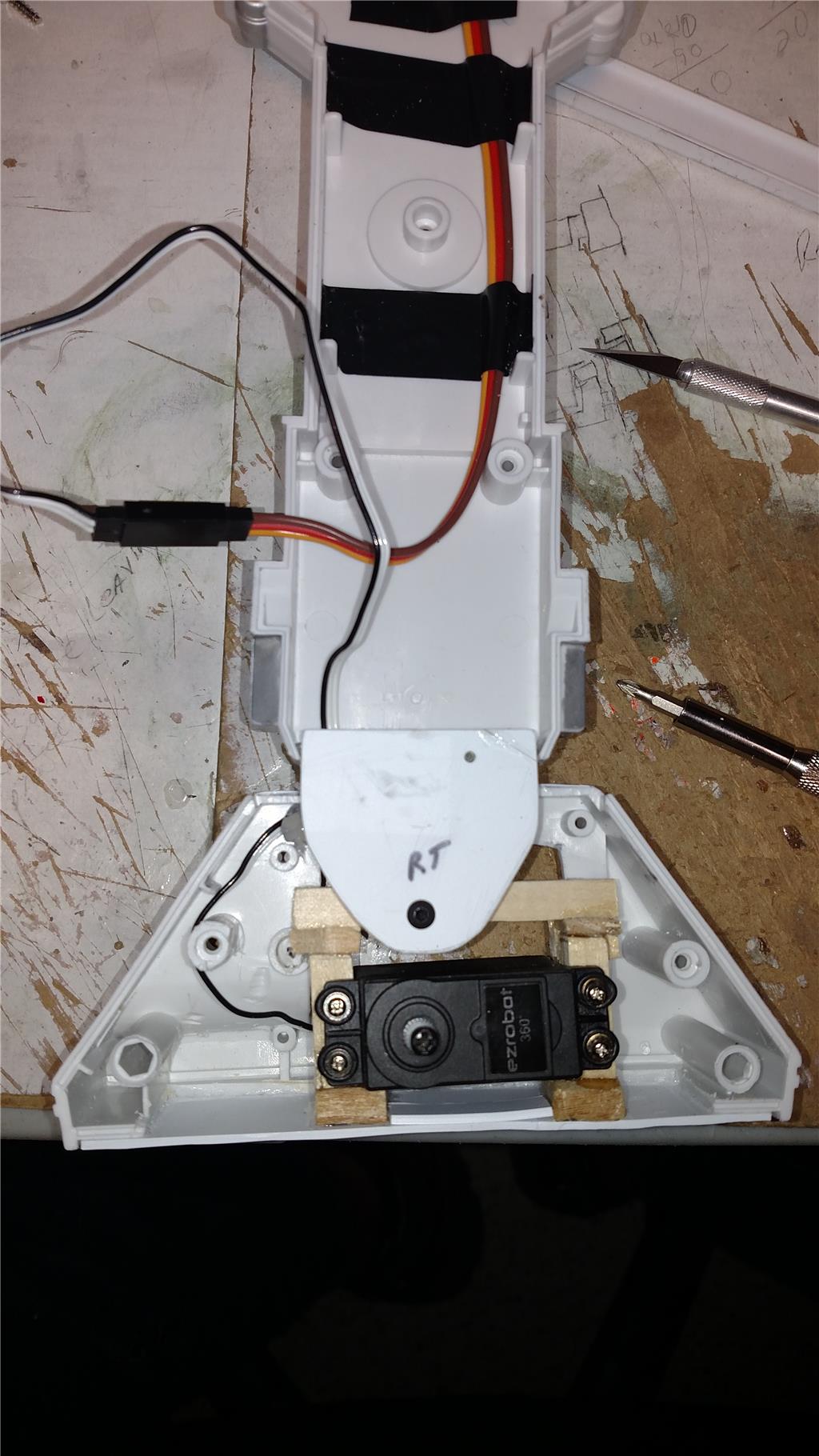
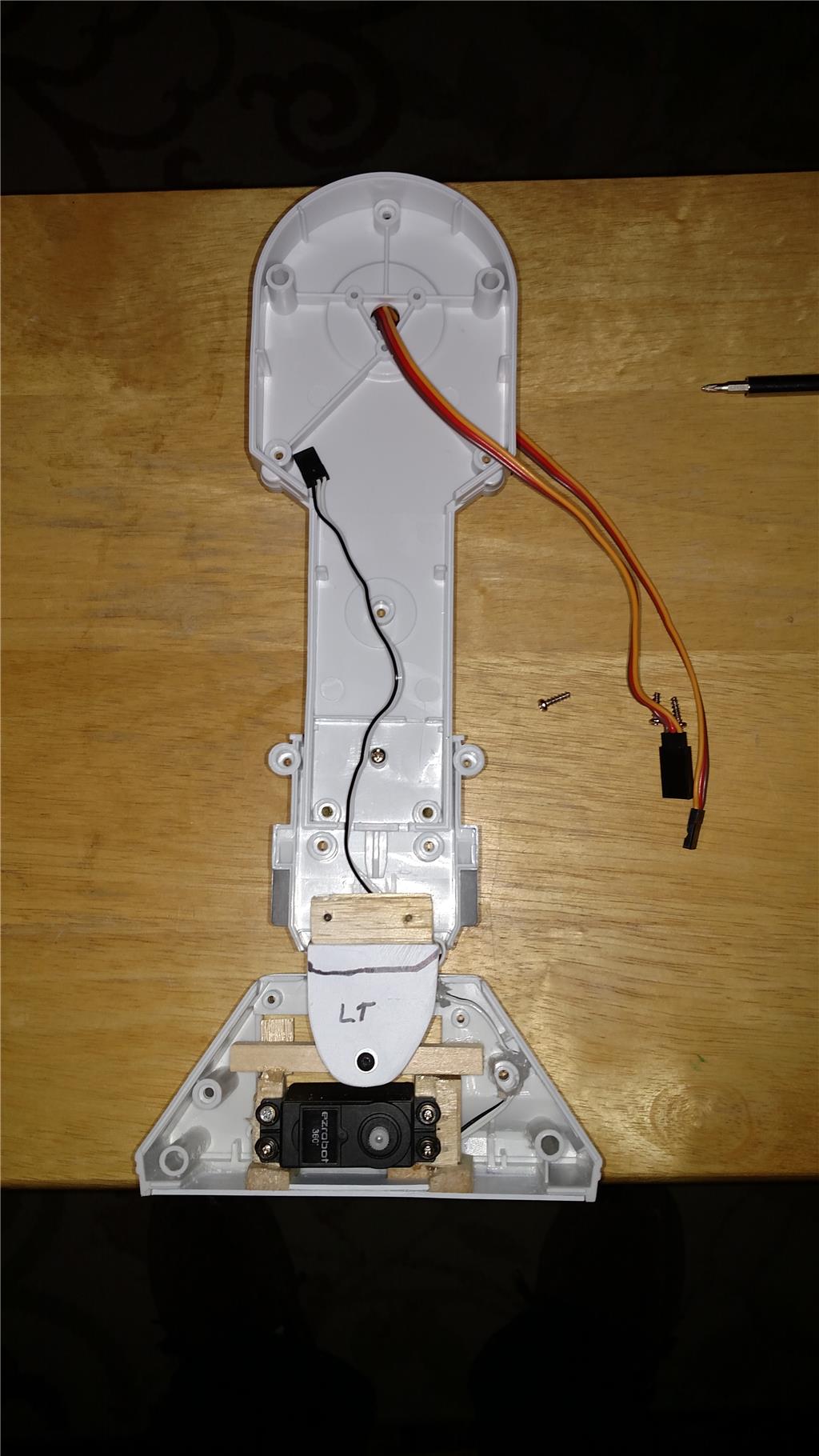
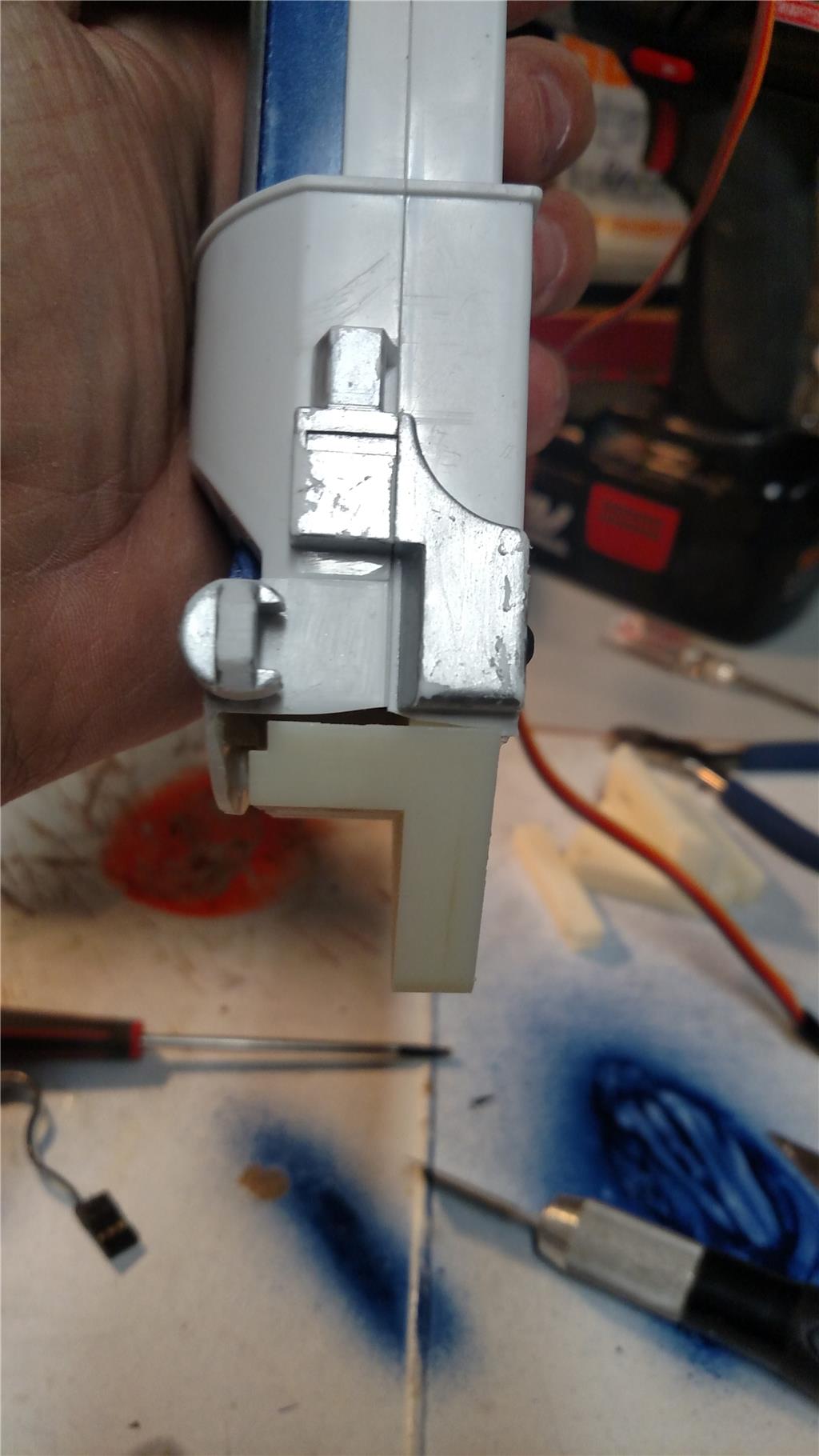
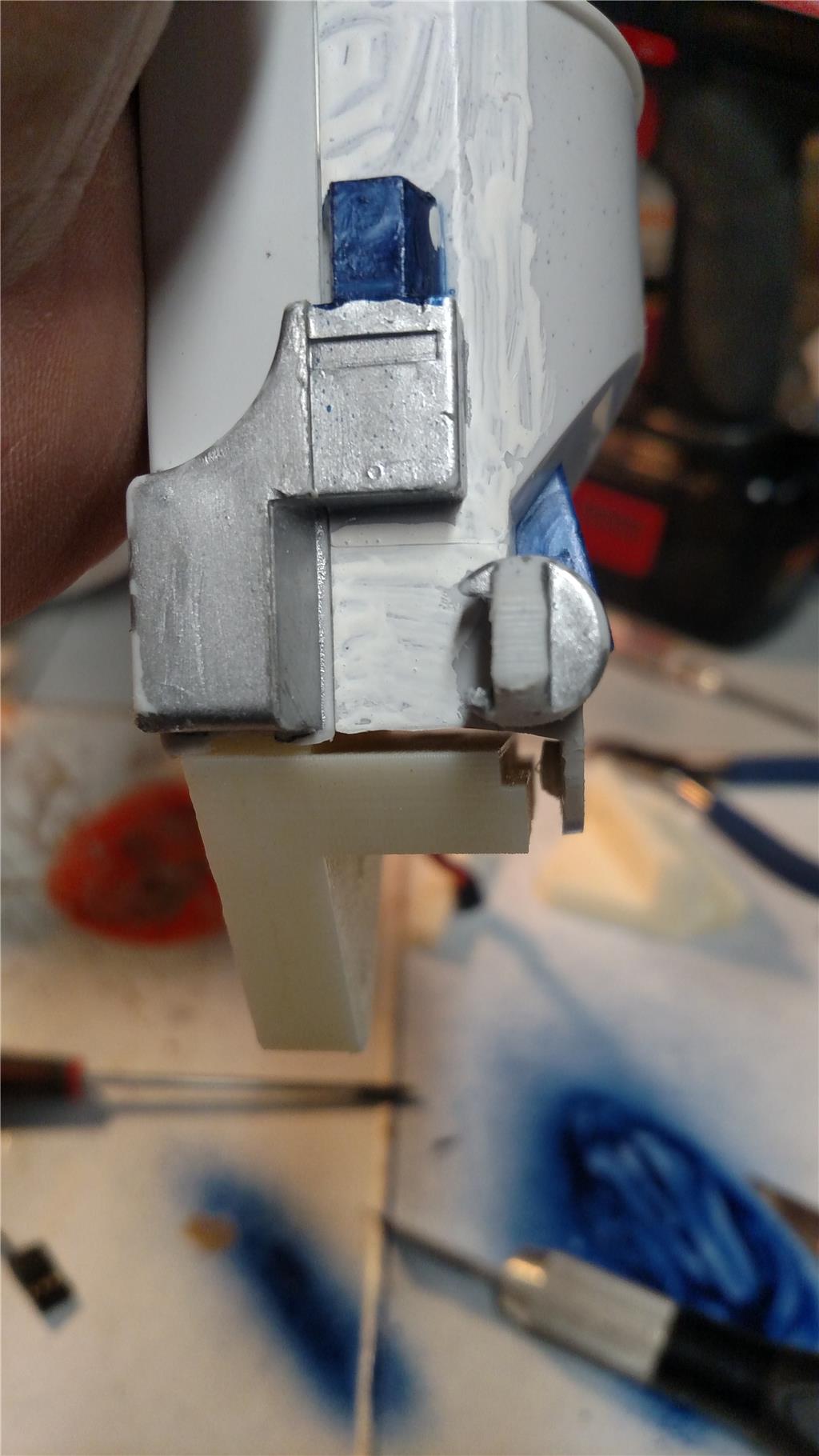
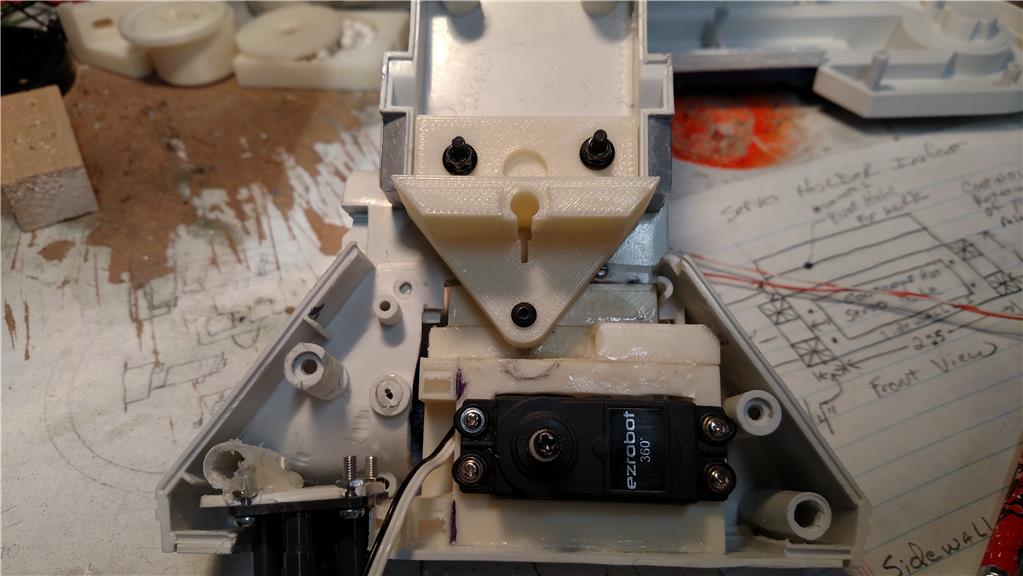
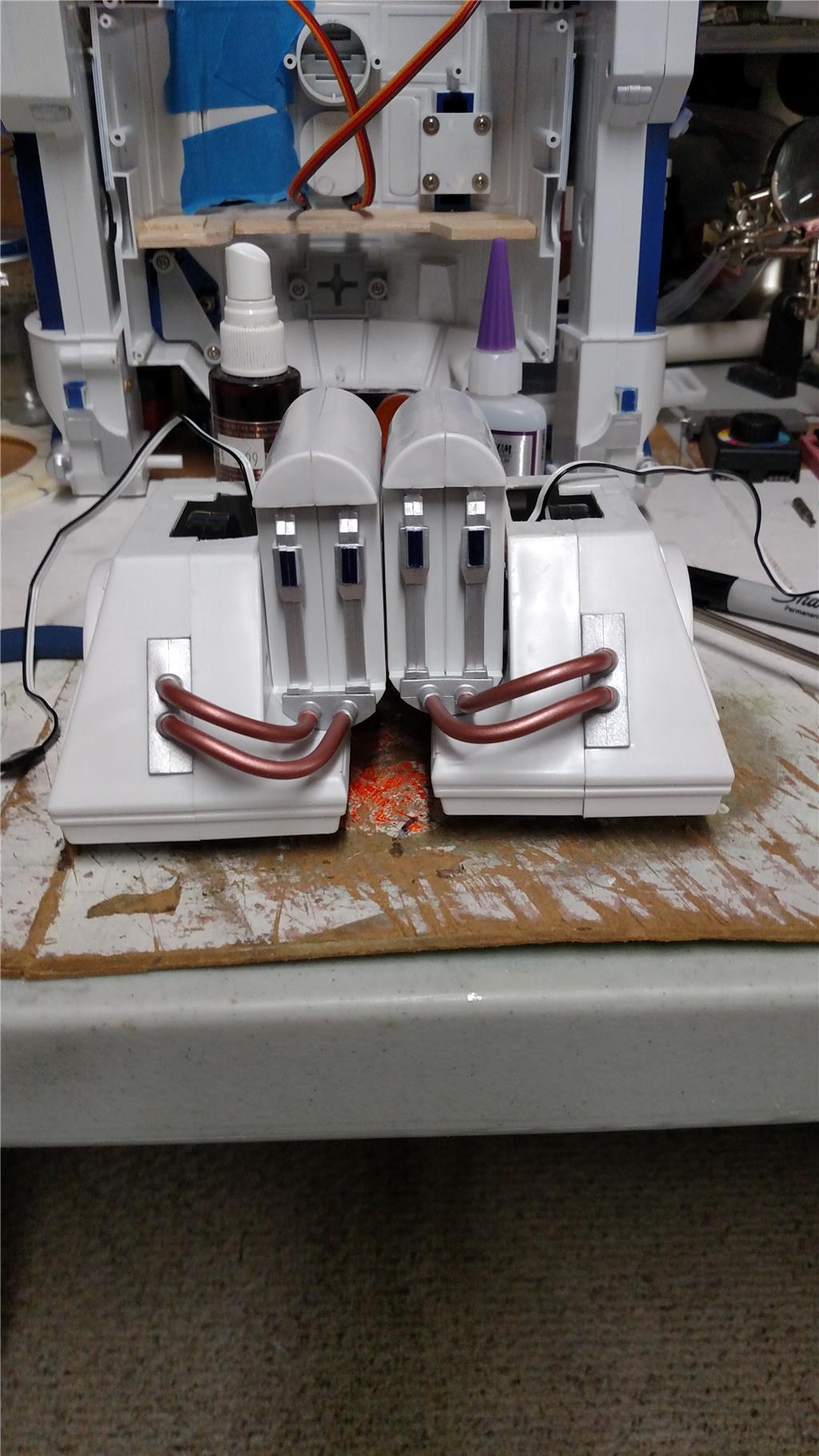
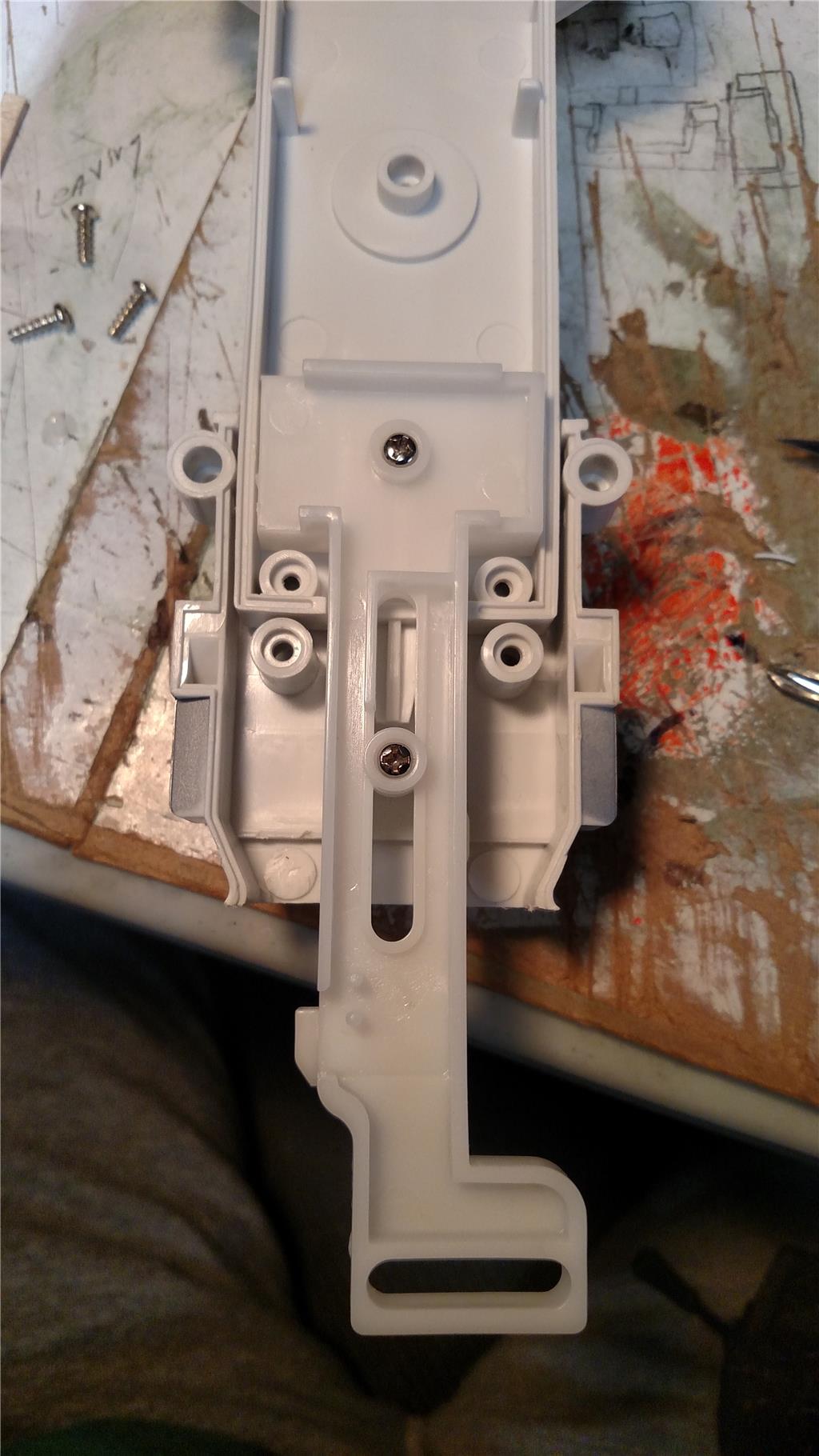
I also need to design a servo hold and pivot point all in one. See the photo of the assembled ankle and you will understand why I say that. Redesign will wait a little bit though.
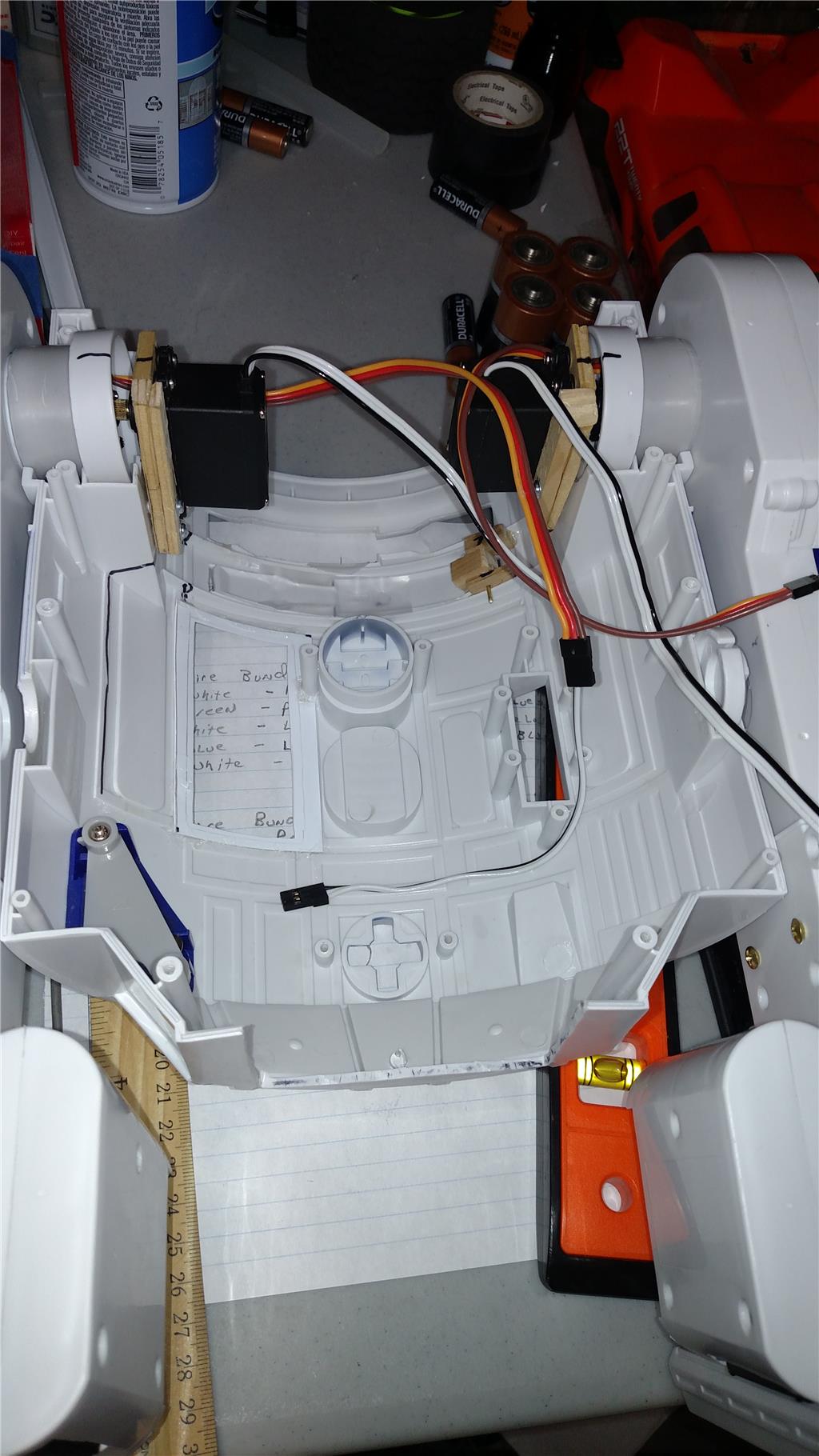
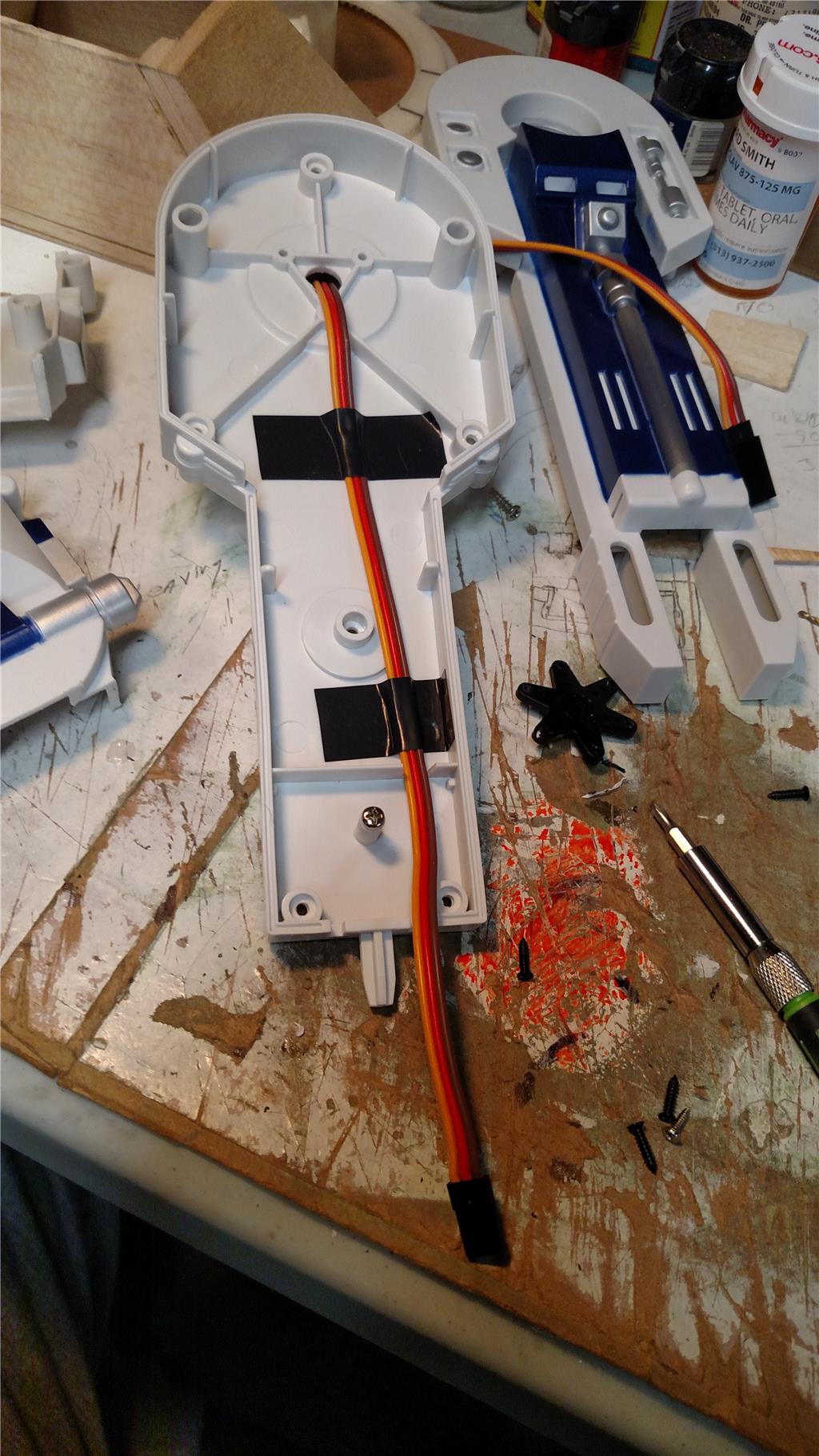
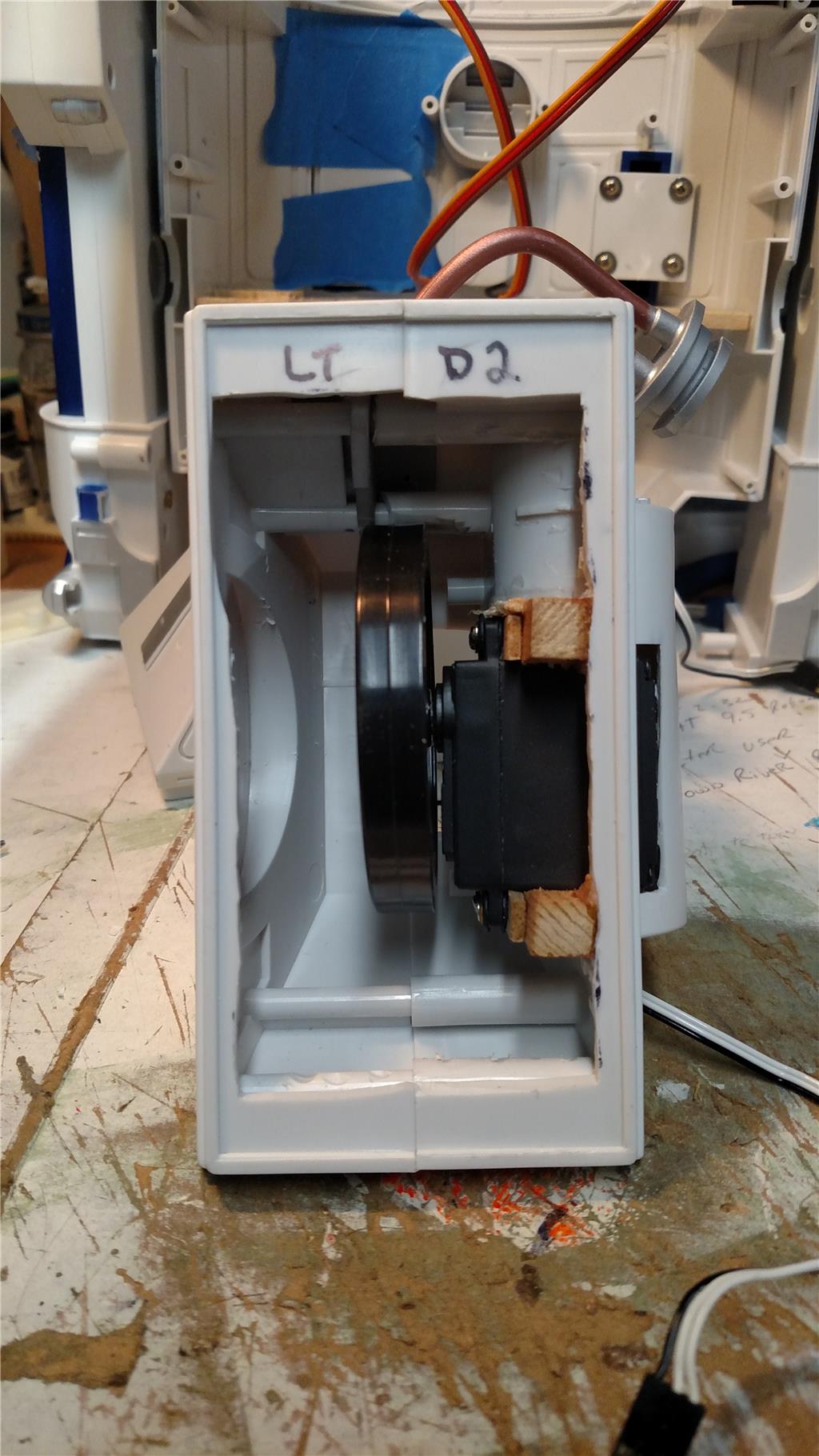
Anyway I got the new ankle completely installed on the right side, and the new shoulder is half way installed. The main reason that it is half way installed is because I forgot to print a piece for the inner shoulder. Those 3D parts will be ready tomorrow. Hopefully I can finish the right side and start the left side this weekend. See the photo for ankle pieces. I will add shoulders as I finish the install.