








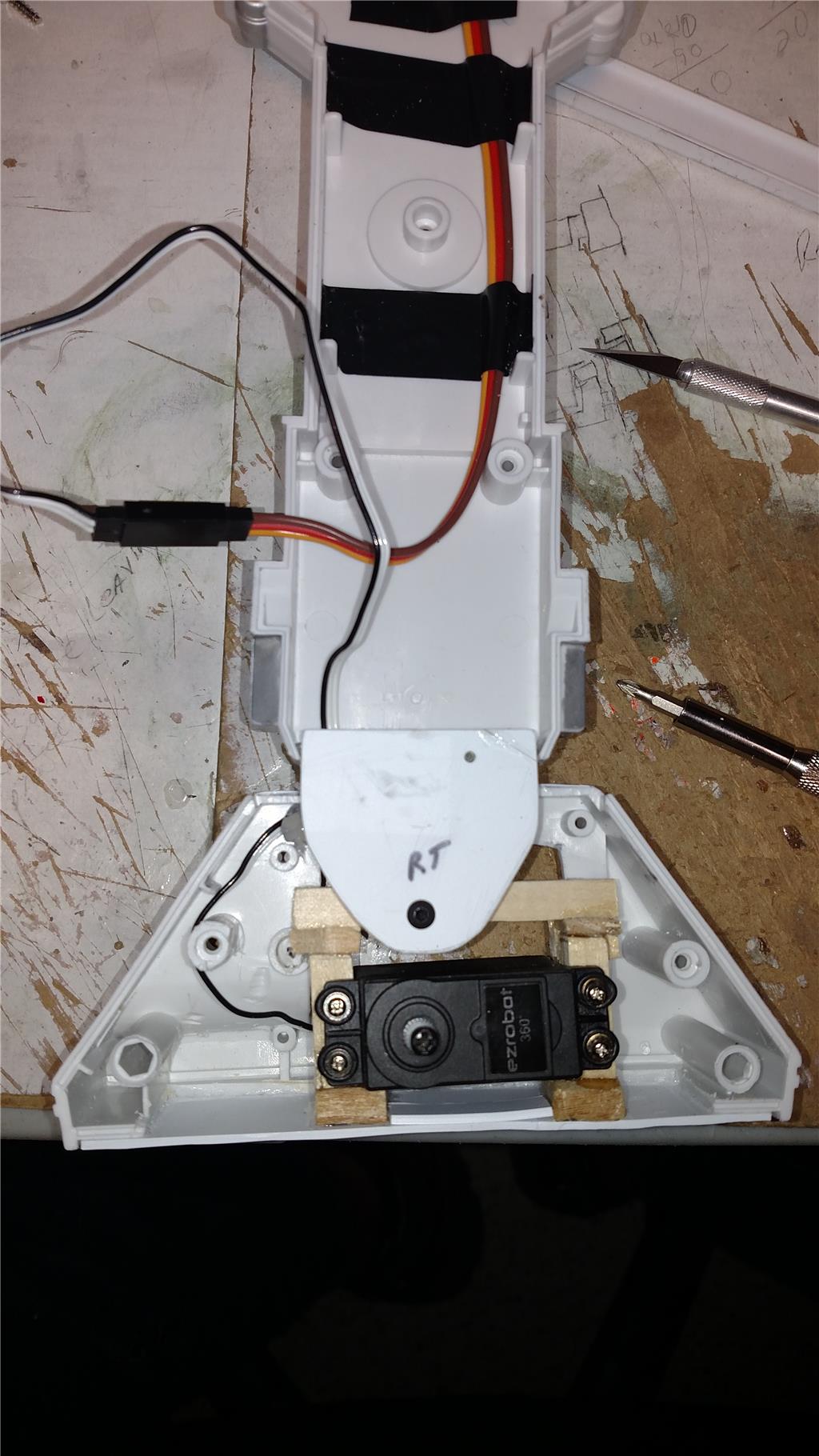




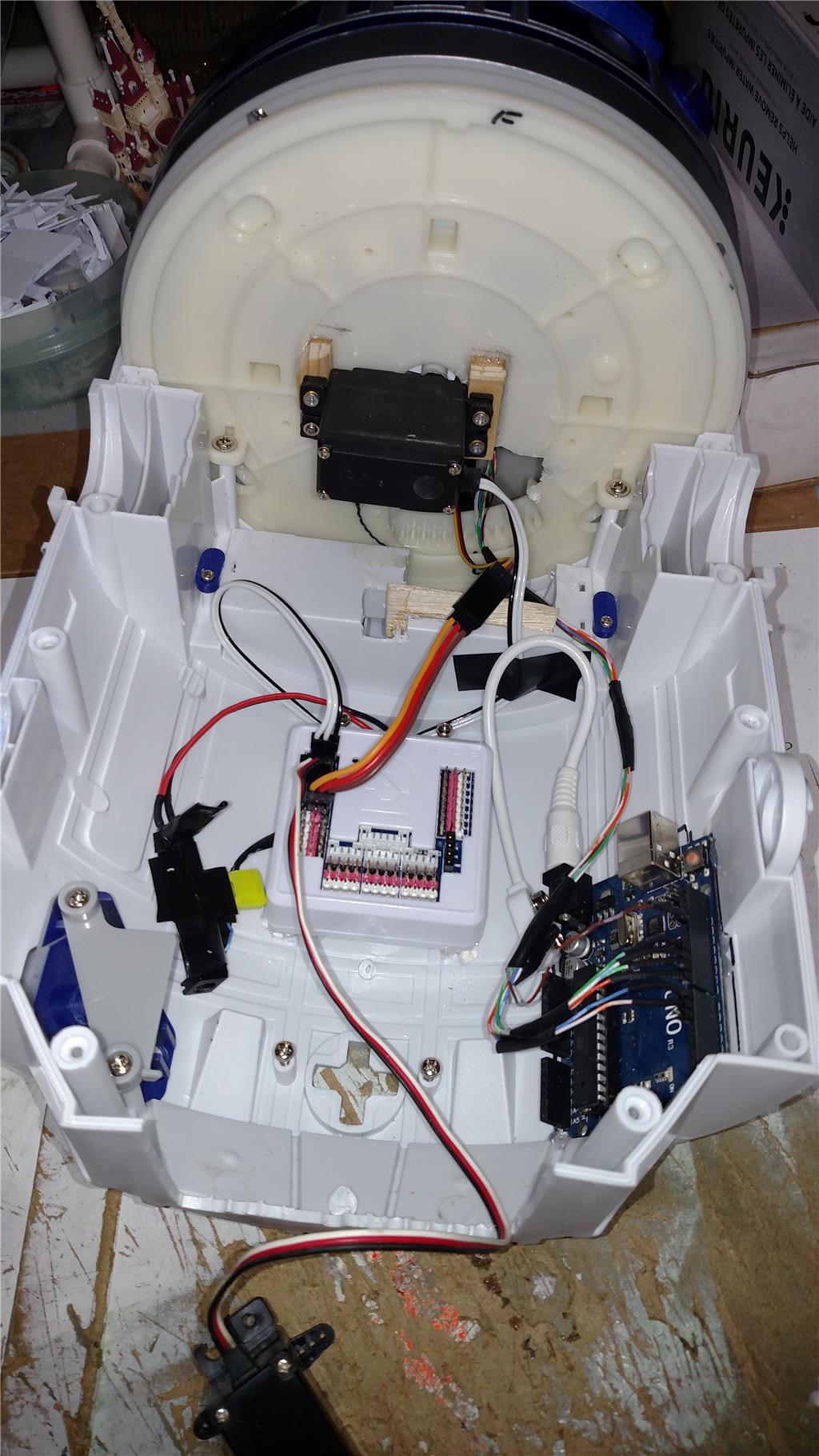

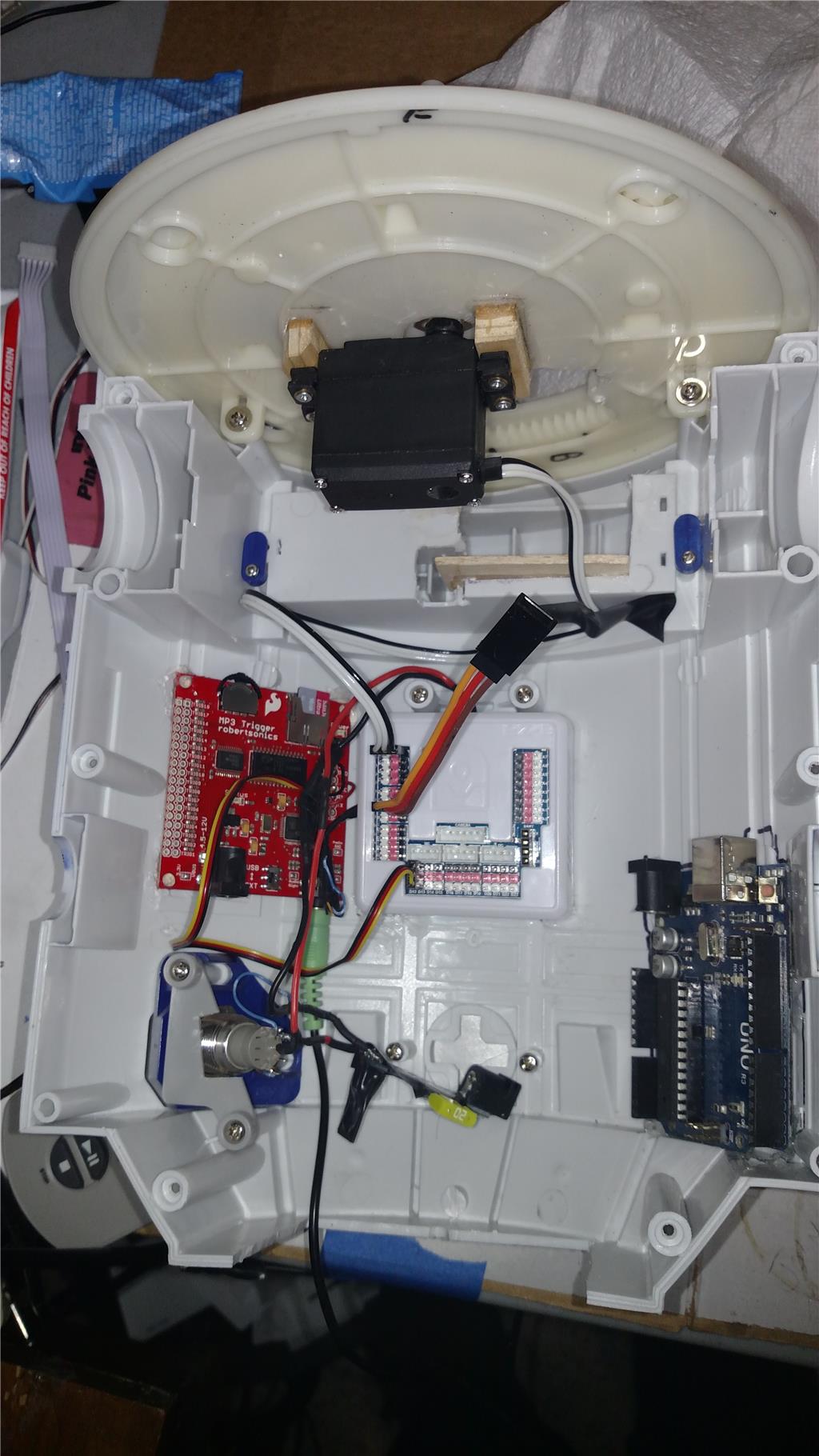

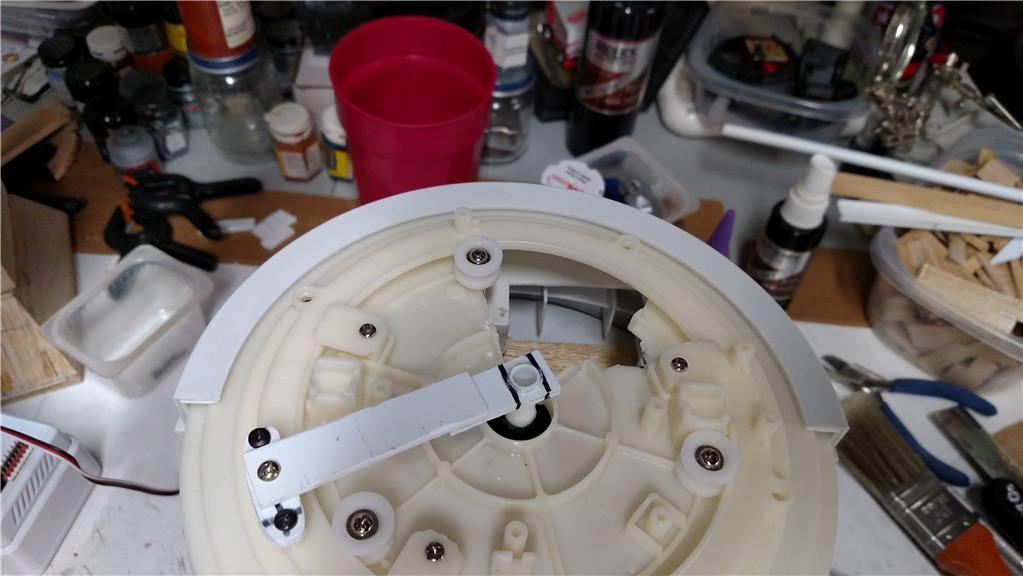
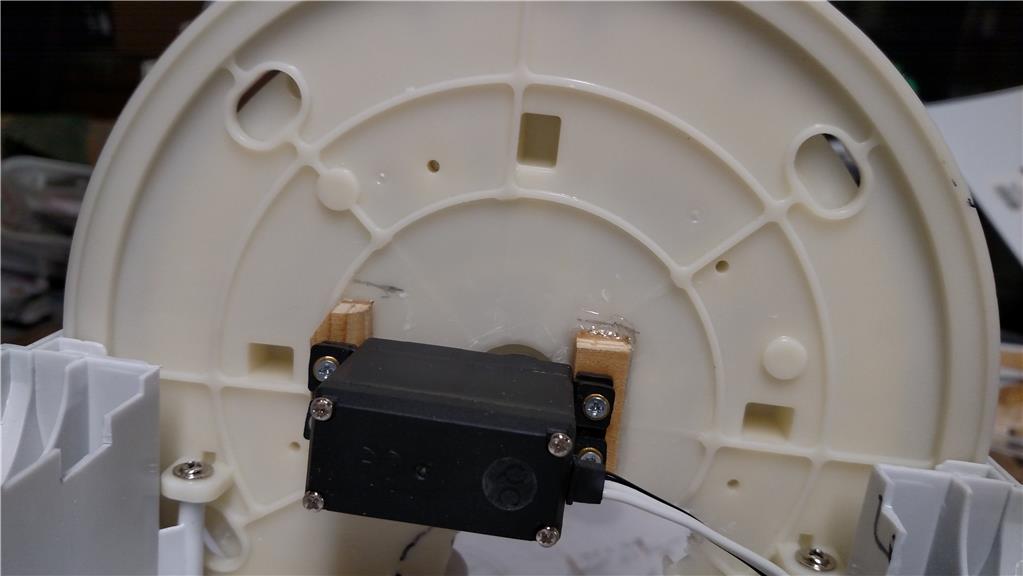


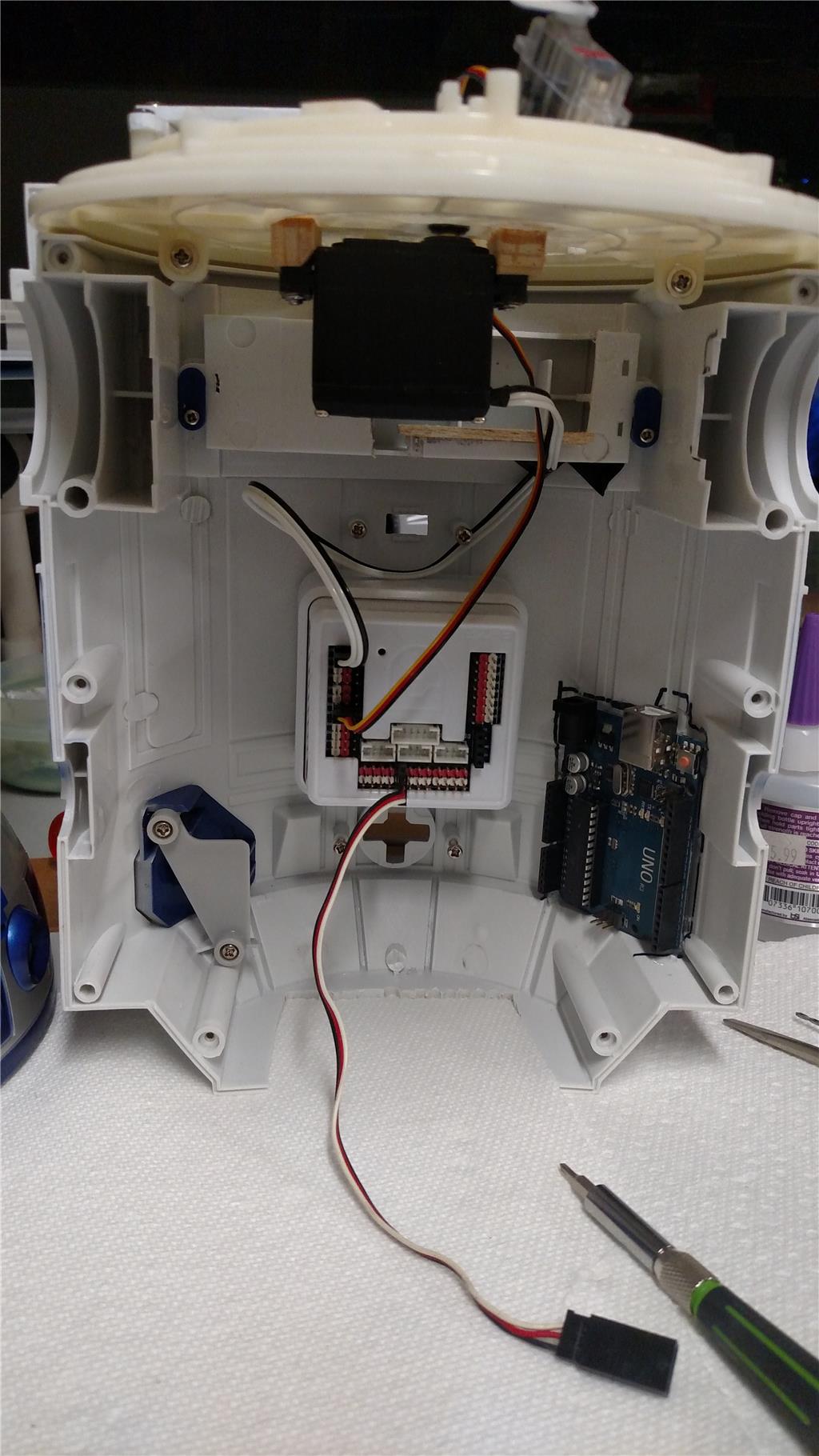









I am currently working on an 18 inch tall R2D2 that was purchased from Toys-R-US. This R2D2 had no electronics in it at all, just a pose able plastic model. It has a simple lazy susan type setup for the head movement. It has an upper gear and a lower plate. I put a EZ-Robot 360 degree (continuous) rotation servo in for the gear to rotate the head. The problem that I am having now is that the continuous rotation servo is difficult to stop at a give point, say 90 degrees. This faces my R2D2 head to the front. How would I control it like an Auto Position control, yet get the 360 degrees of movement out of it. with the Auto Position control I only get 180 degrees of movement. I am on a tight budget (unemployed) and am using what I have at my house for most everything I want to do with this R2 unit. The issue that I am having with the Auto Position is that once it hits the point it should stop, the servo keeps going until I hit the panic button to stop it. The stop button has no effect. Any idea's would be helpful. I have been programming with the EZ-Robot for about 4 months, but have programmed for 6 years with legacy software.
Regards, Richard
Discover more robots

Cardboardhacker's Emotions V1
Brw's New Robot And A Bluetooth Question


Richard,
Some useful links:
A continuous servo does not have position, more info here: https://synthiam.com/Support?id=11
similar problem: https://synthiam.com/Community/Questions/10698
similar build: https://synthiam.com/Community/Questions/8670
Hello @rsmith
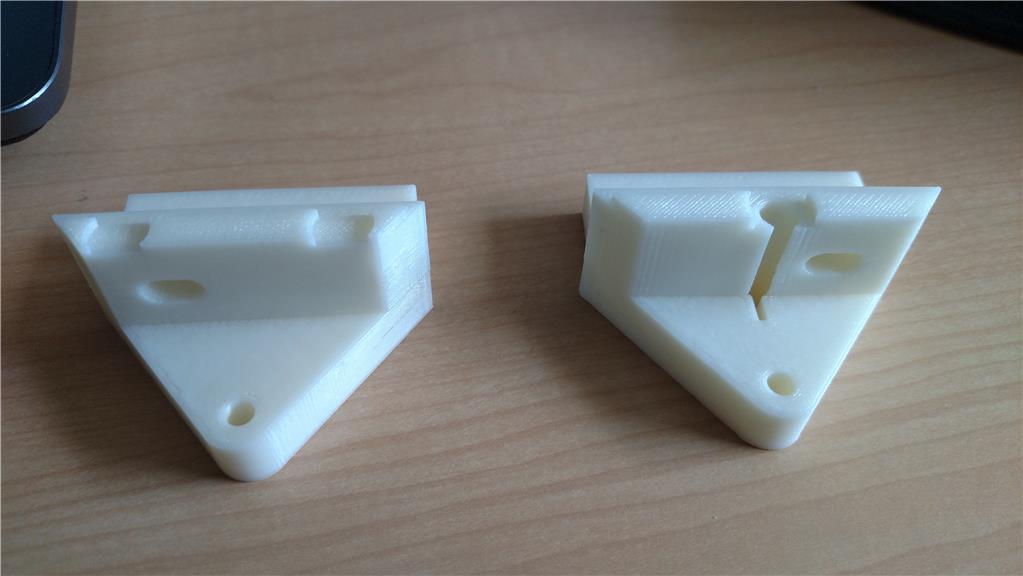
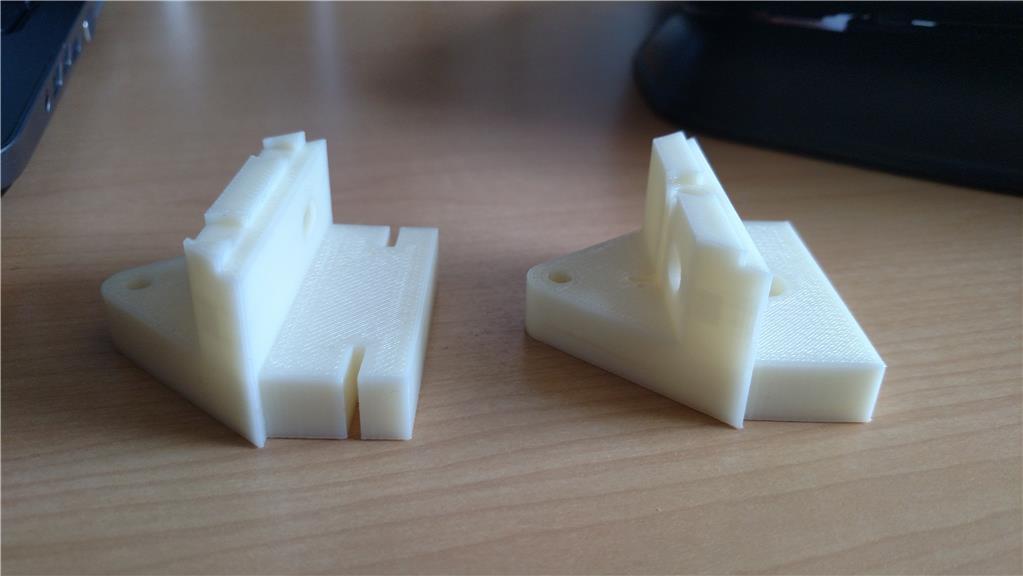
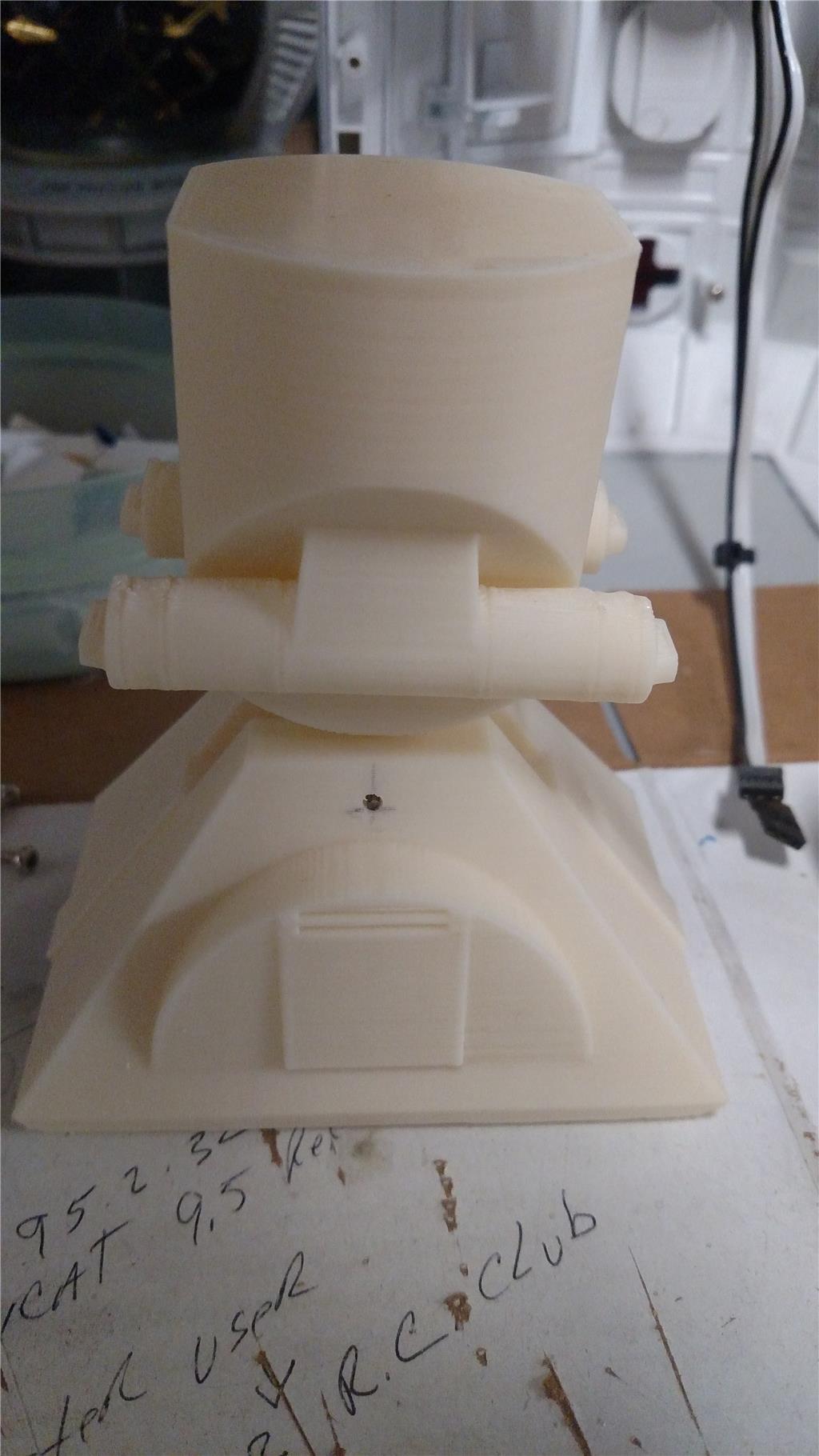
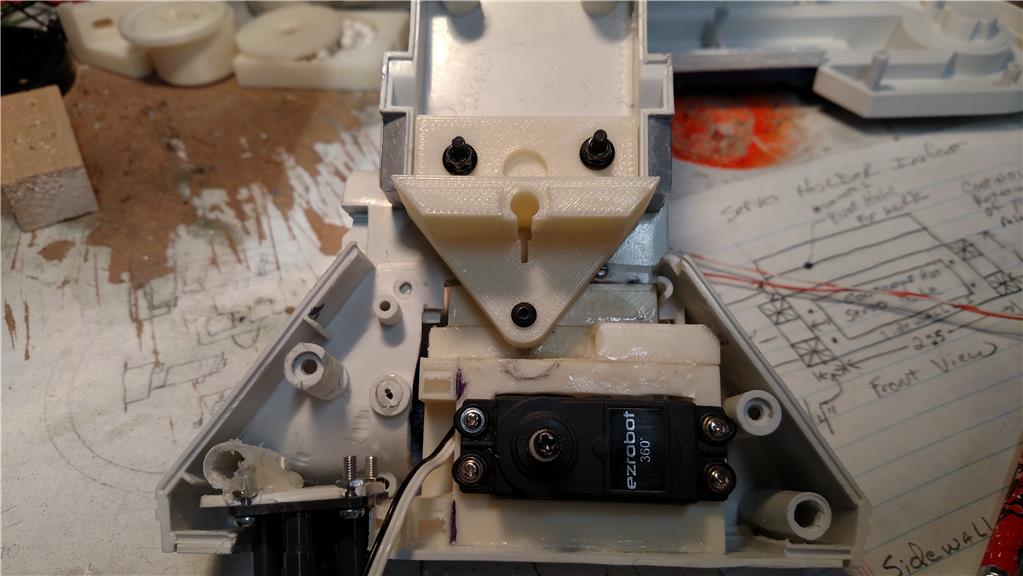
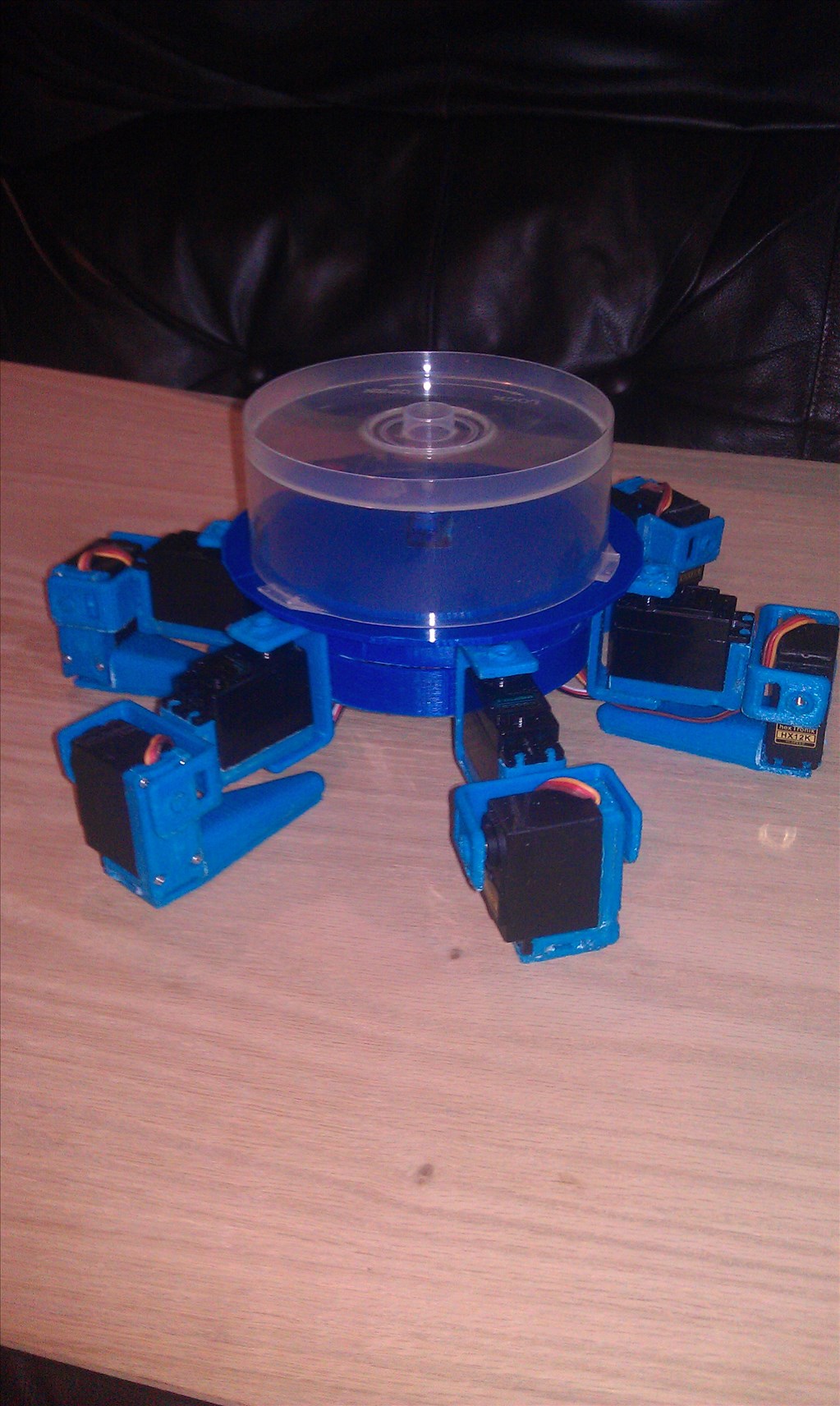
I built the same one you purchased. I did a Showcase which has the conversion build. I used simple parts I 3d printed, but you can make the parts if a printer is not available. Check out the link below.
https://synthiam.com/Community/Questions/8670
Ron
@ptp A quick Hello !
I forgot to mention, I originally used a continuous servo as you described, (.stl file included for a 3d print) but changed it to a direct drive using a standard servo. The speed and action is much better even though you don't get 360 degree movement.
Thank you to @PTP and @AndyRoid for the review of a continuous rotation servo. I had missed the part about positioning of it. I am looking at Andy's showcase at this writing. It has been a great read so far. Looking at the similar issue link posted by @PTP, it seems that a winch servo was used for the periscope and will be for the dome rotation on that project. I will also be checking out the winch servo. As I intend on putting a periscope and radar dish in my R2.
Thank you again for the assistance. If there is anything else that comes to mind, for this project please keep the idea's coming.
Regards, Richard
Don't forget to post a picture of your progress.
Winch servos are a good idea, however out of the budget for the time being.
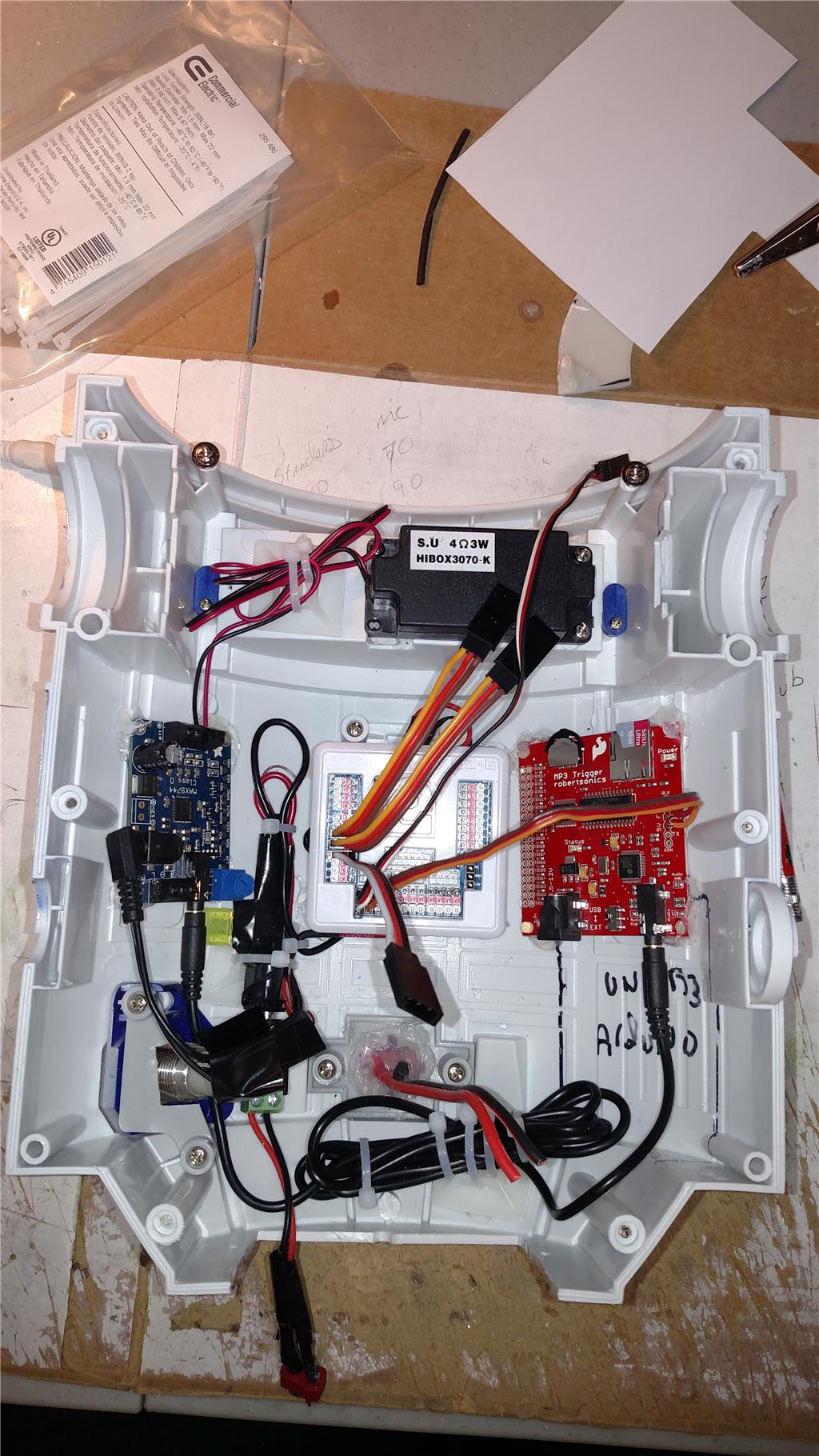
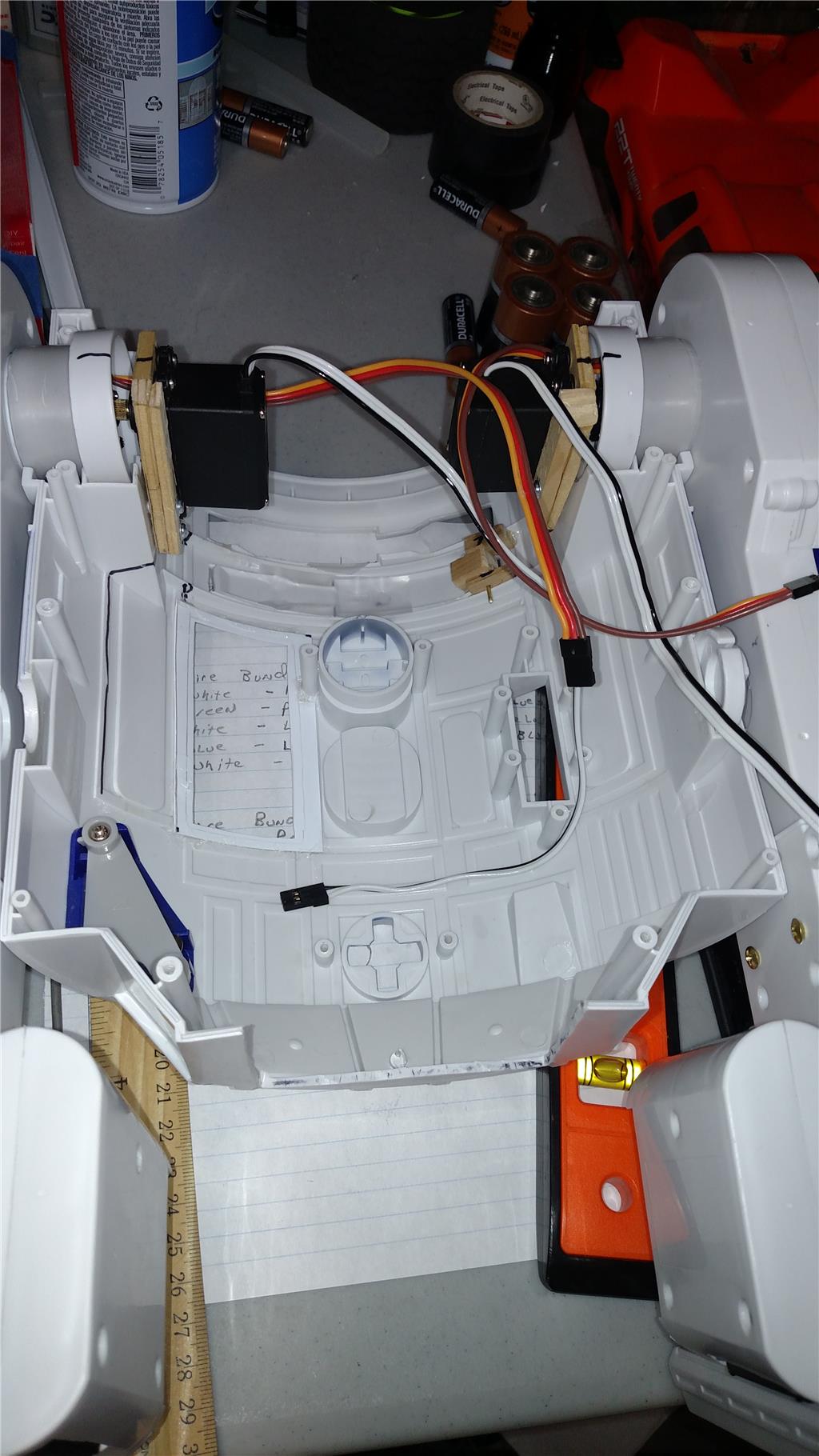
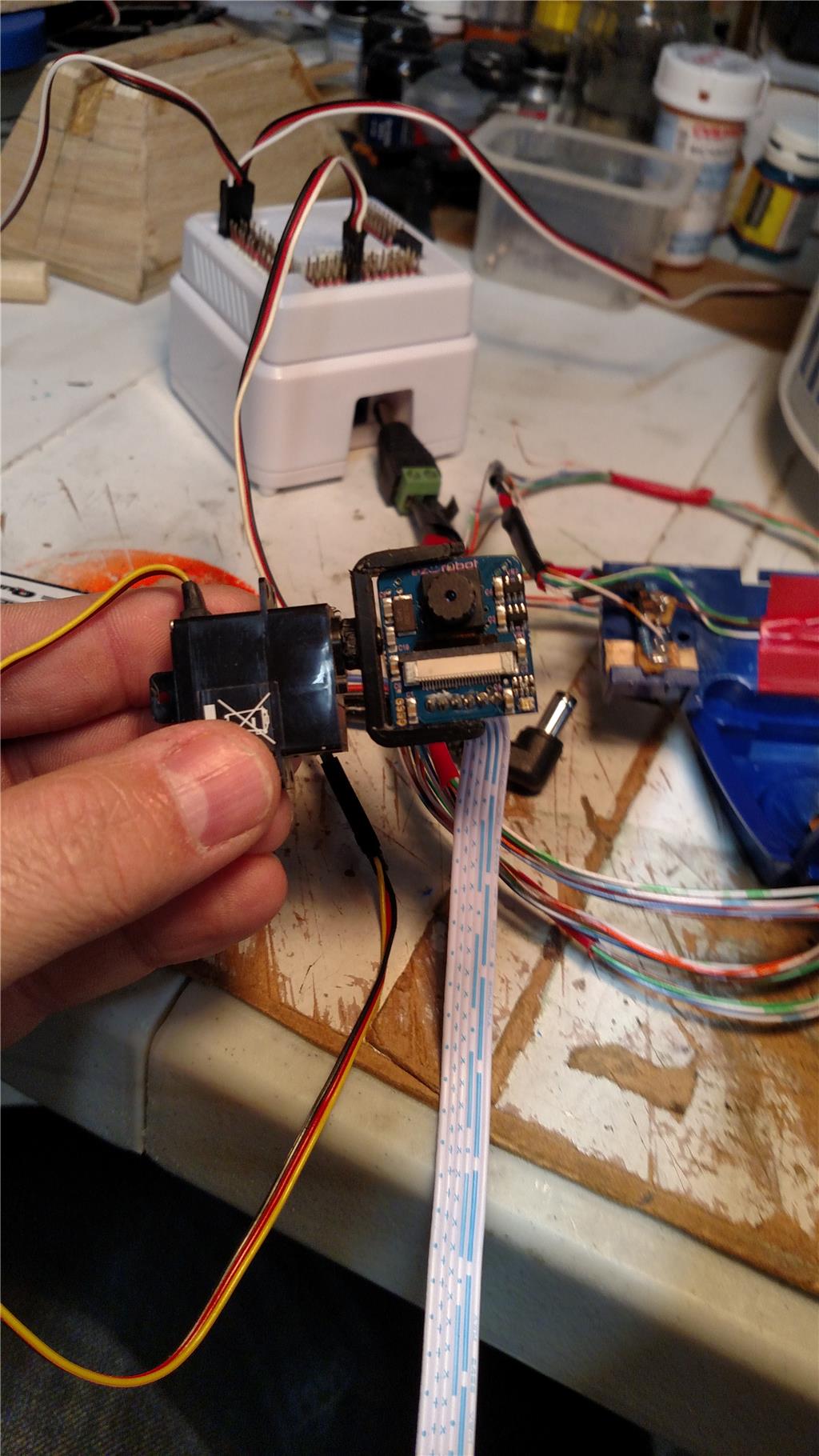
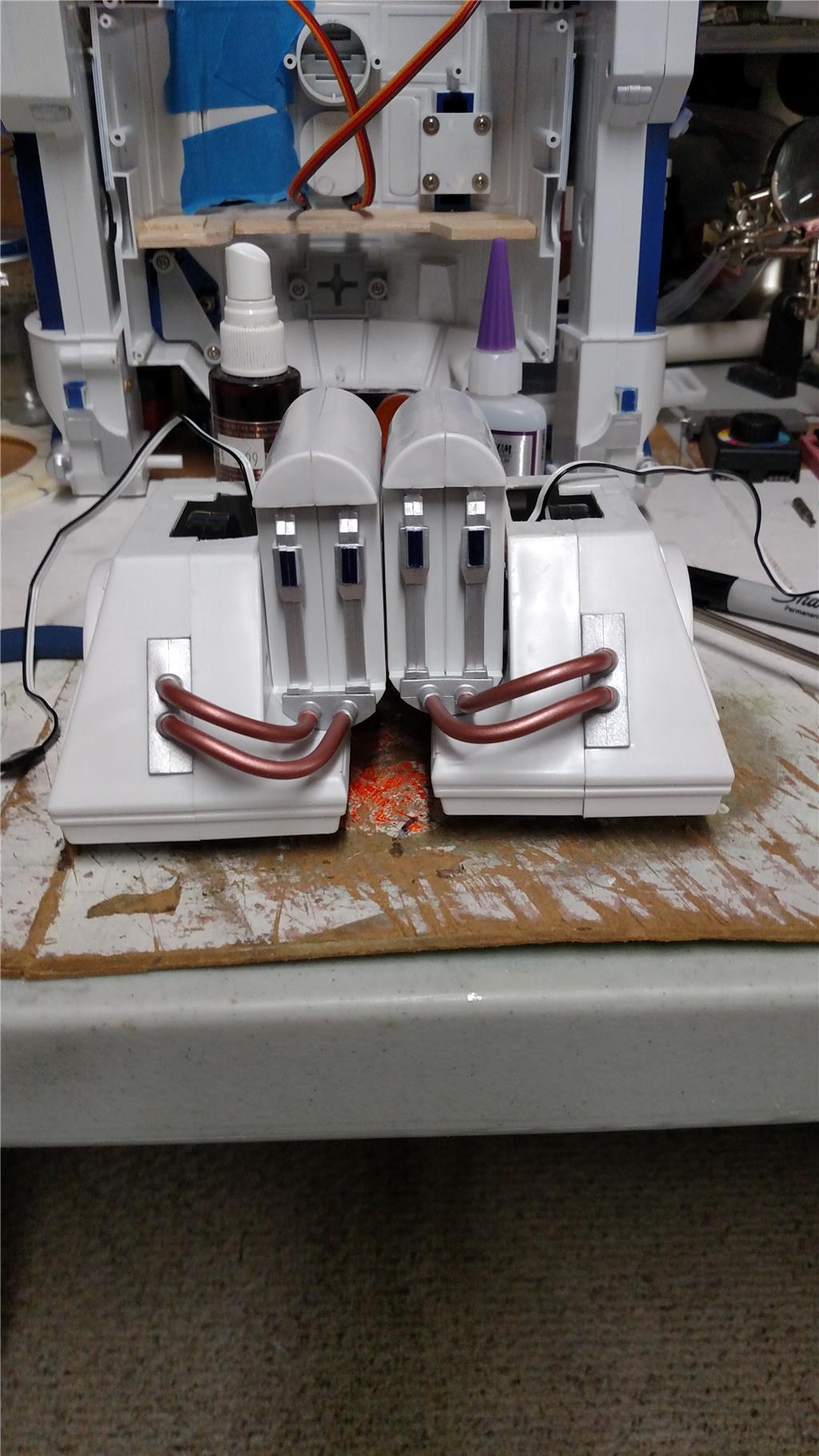
@AndyRoid Here is a Youtube video and some pics from my R2D2 project so far. I have stopped working on R2 Dome rotation for the time being. I would like to get a few more items completed in the mean time. I am going for broke and adding as much as I can. I have been working on my Lost in Space 1/6 scale B9 Robot model. Most of the issue with the B9 is space. Dave Schilpous has helped me along with the B9. Anyway back to R2. I did the really easy part of putting LEDs in the dome first. For testing they are run by and Arduino Mega, running my Custom Mustang Knight Rider Sketch. I am also putting the EZ-robot camera from the Developers kit, in R2 front holo projector socket. It fits really good but the green LED for the camera is bright and shines right through R2 dome. Not good. A little bit of black paint on the inside of R2 Dome and it should be gone.
Thanks for the update... Looking good.
Thank you for the positive feedback, Andy.
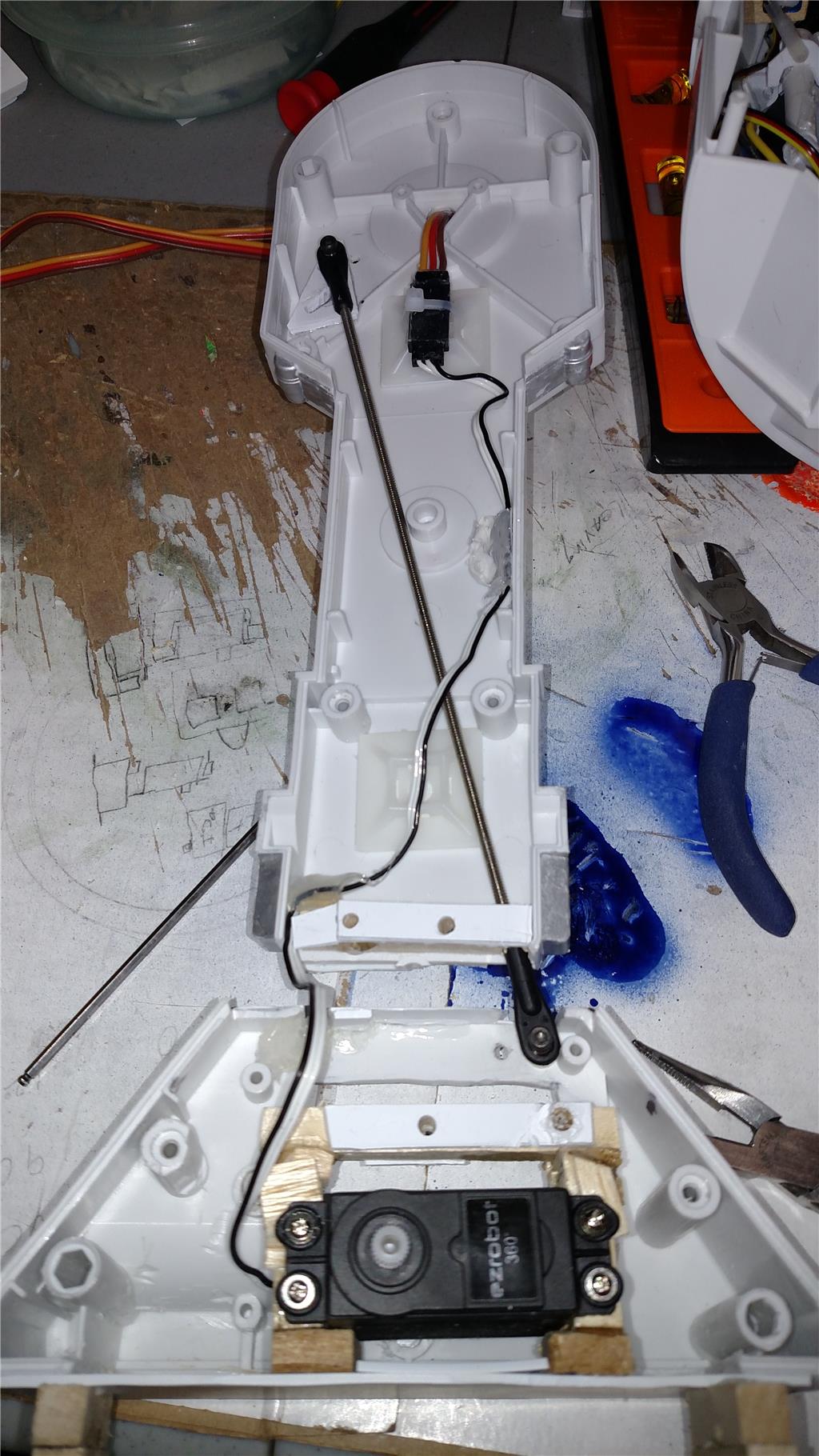
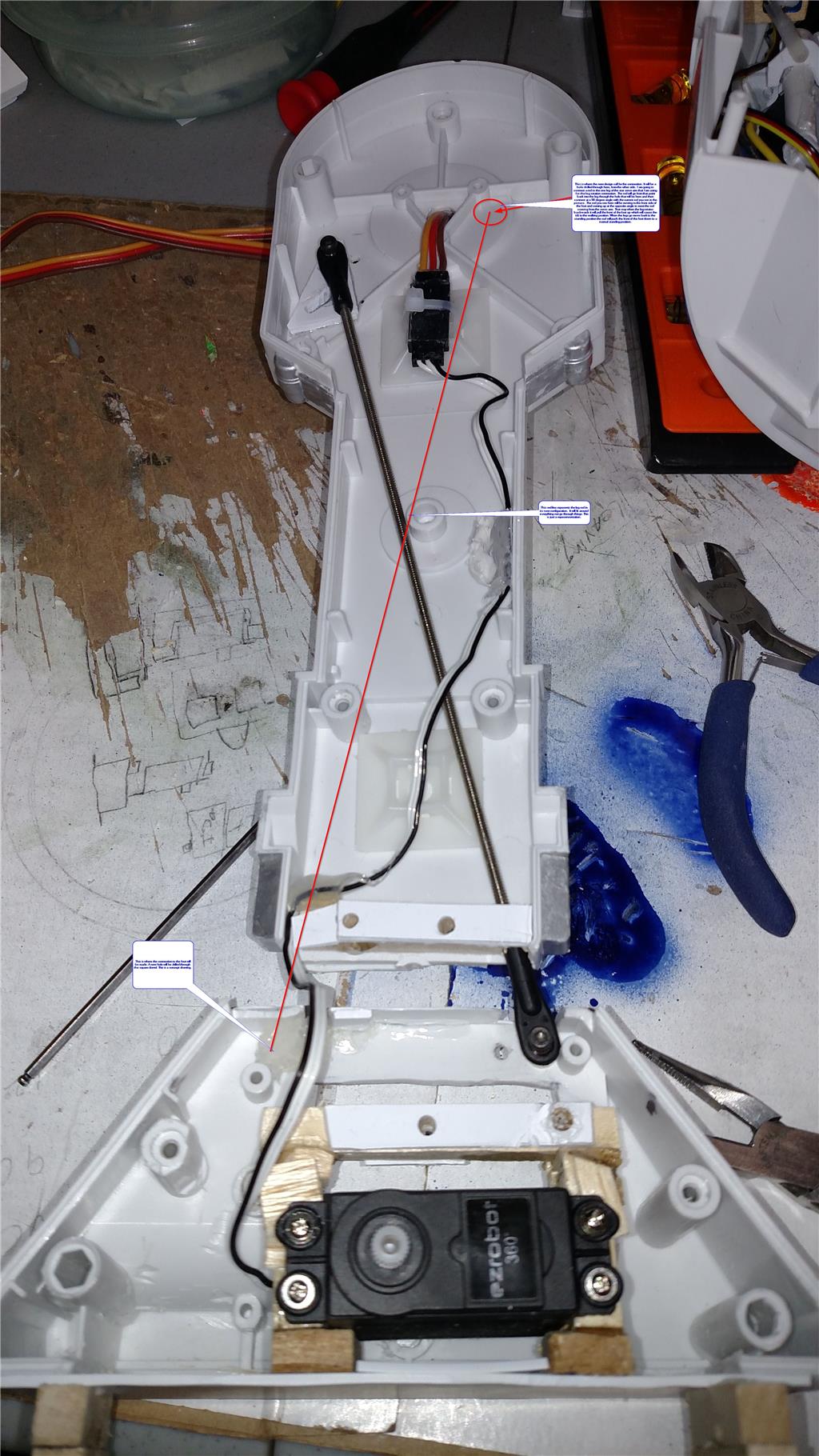
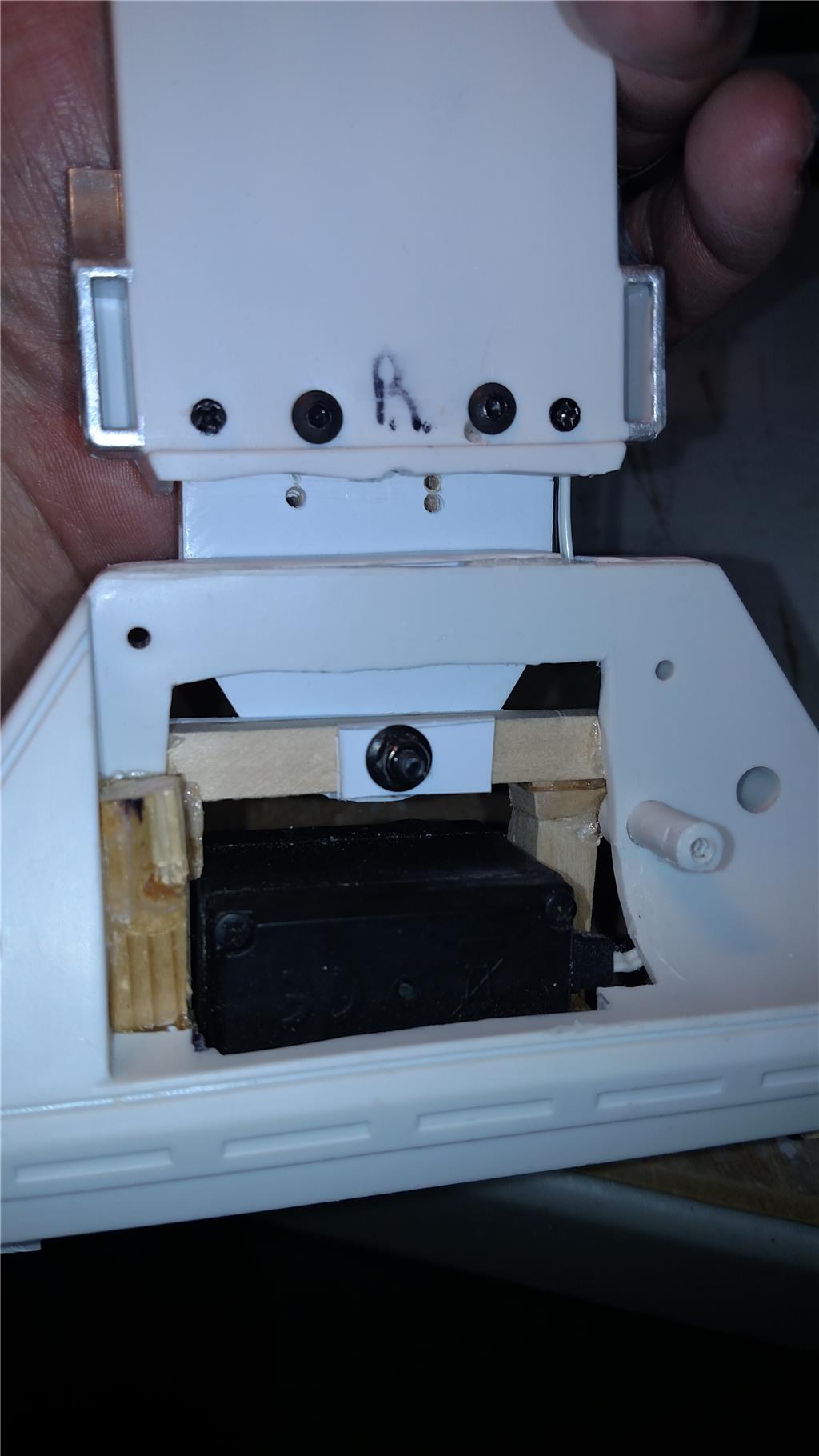
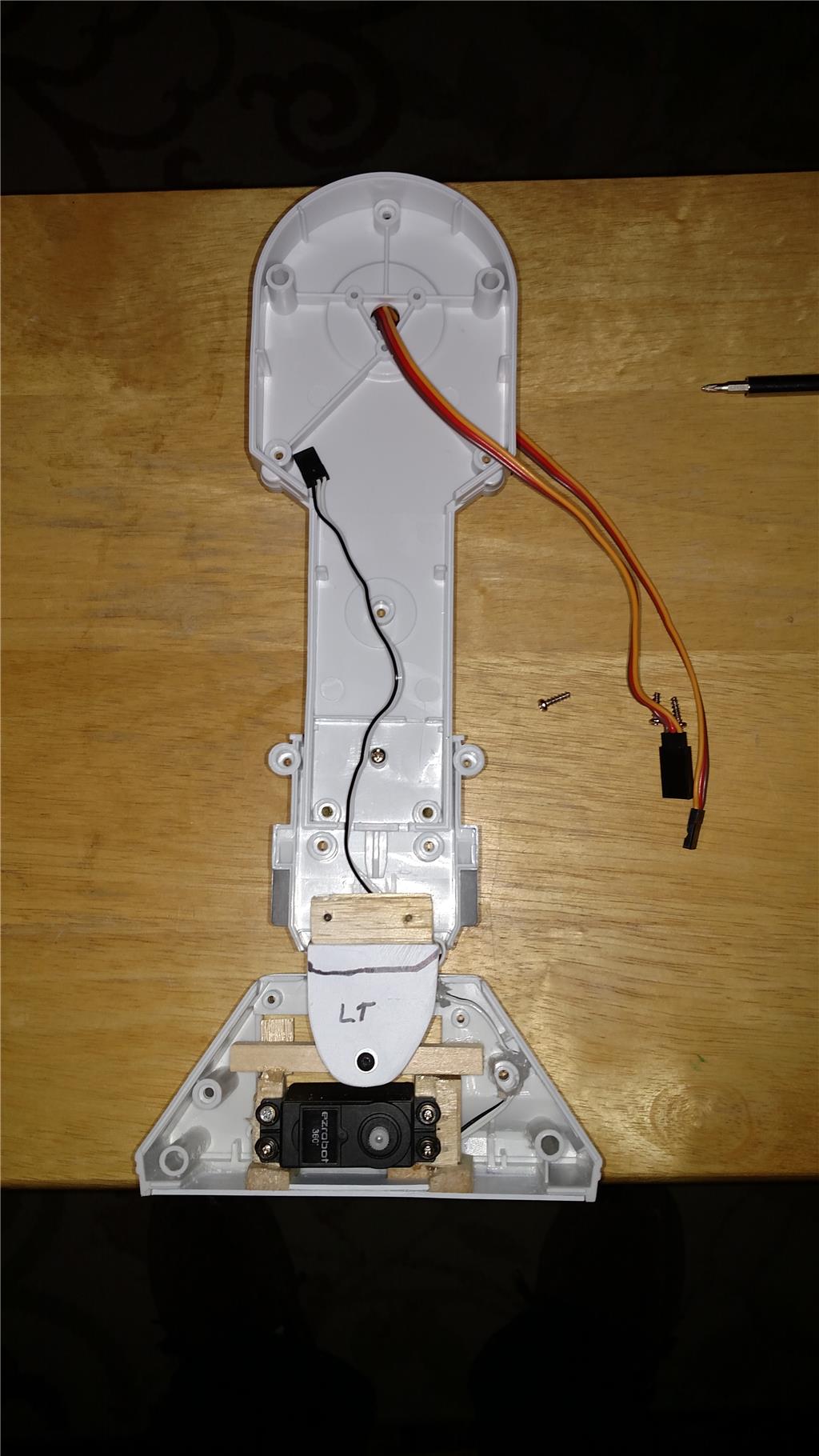
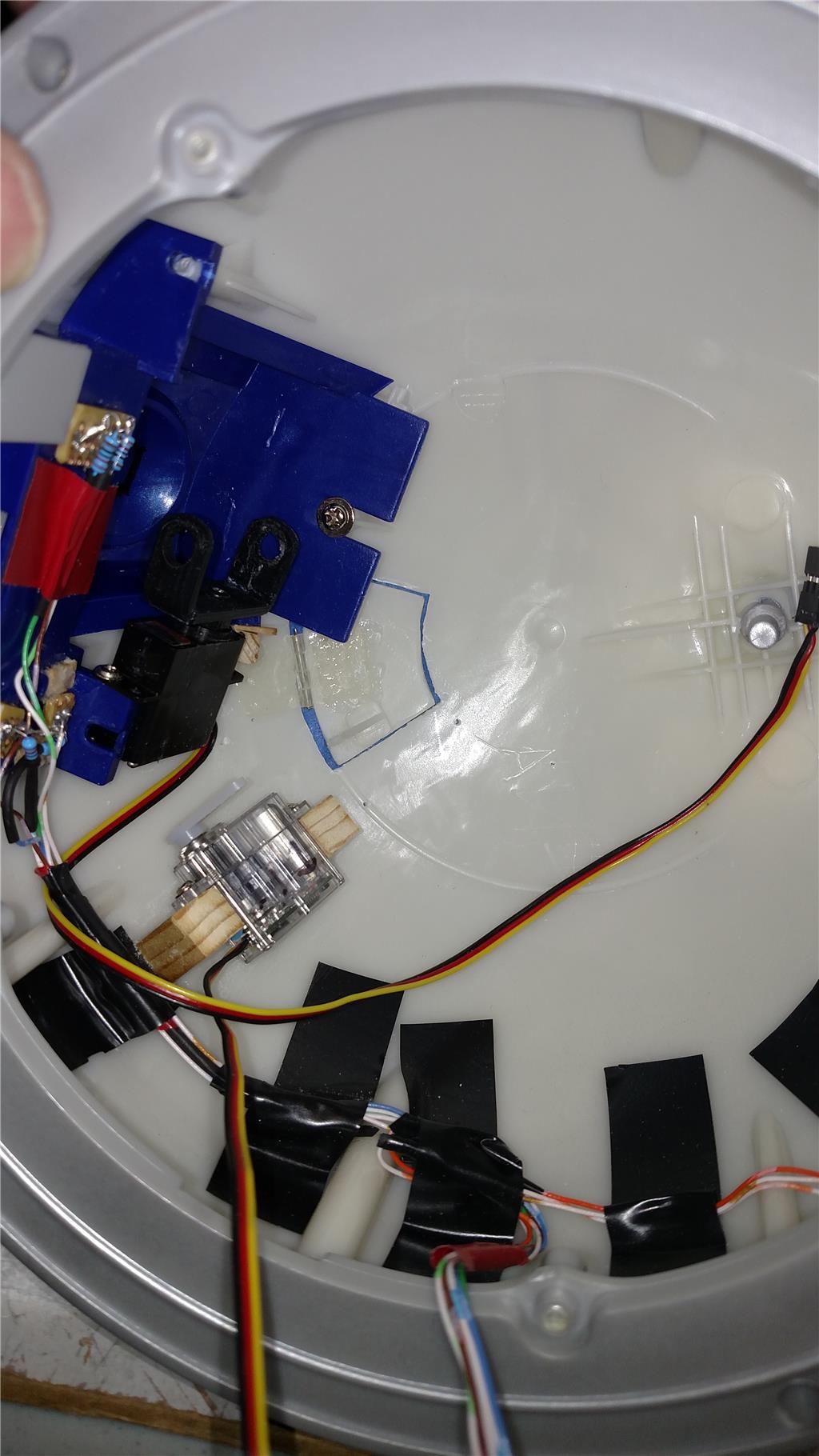
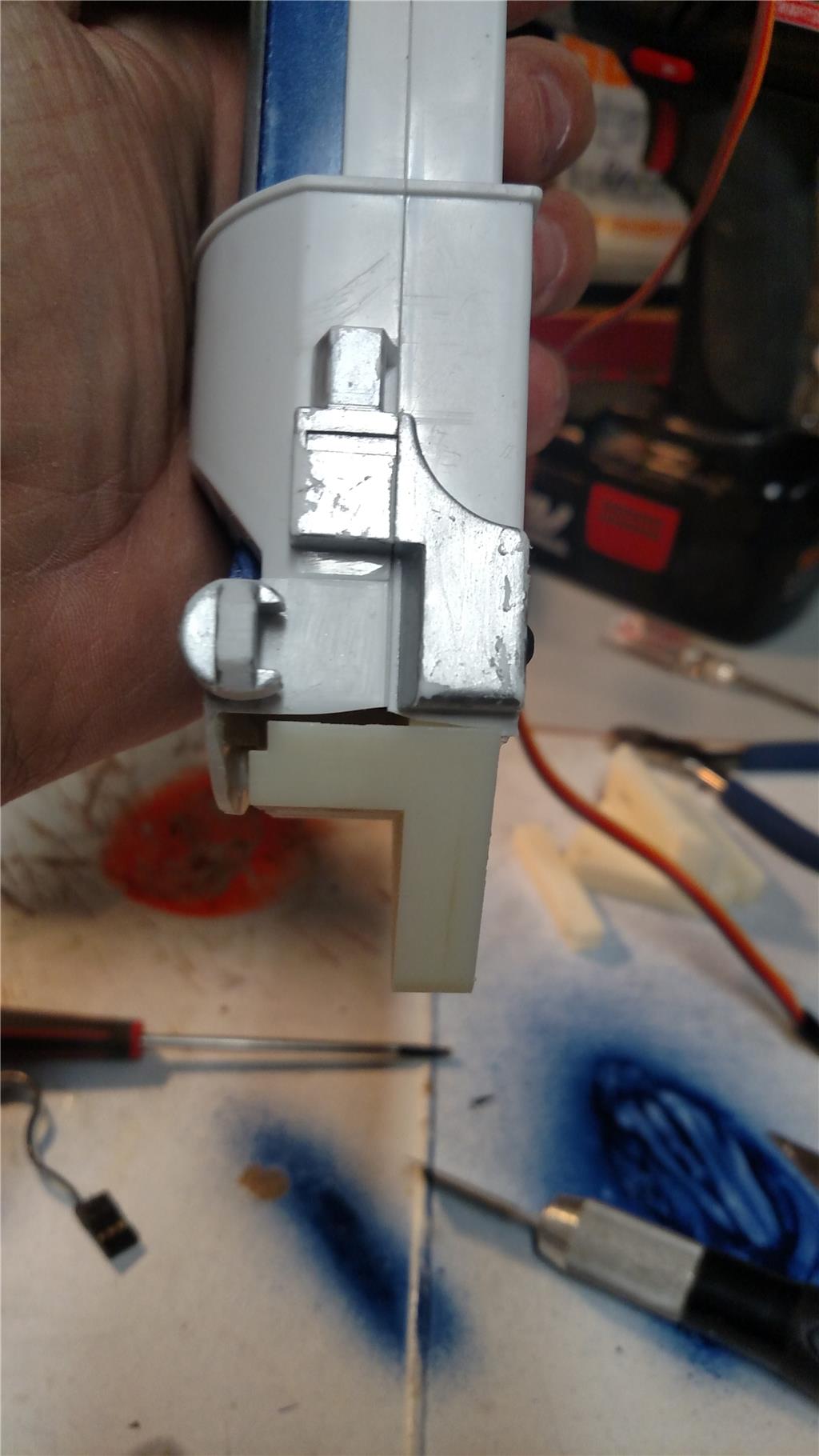
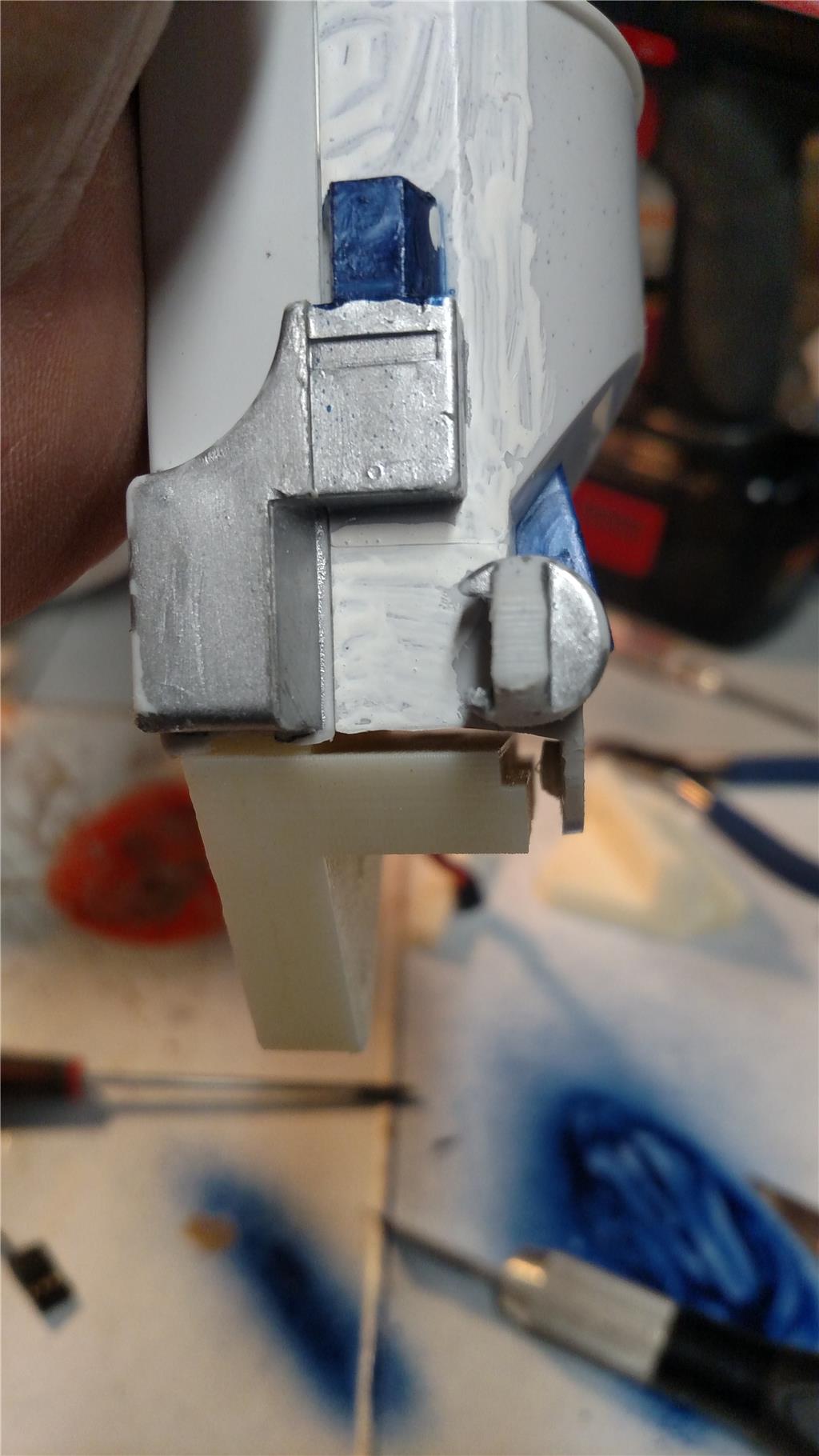
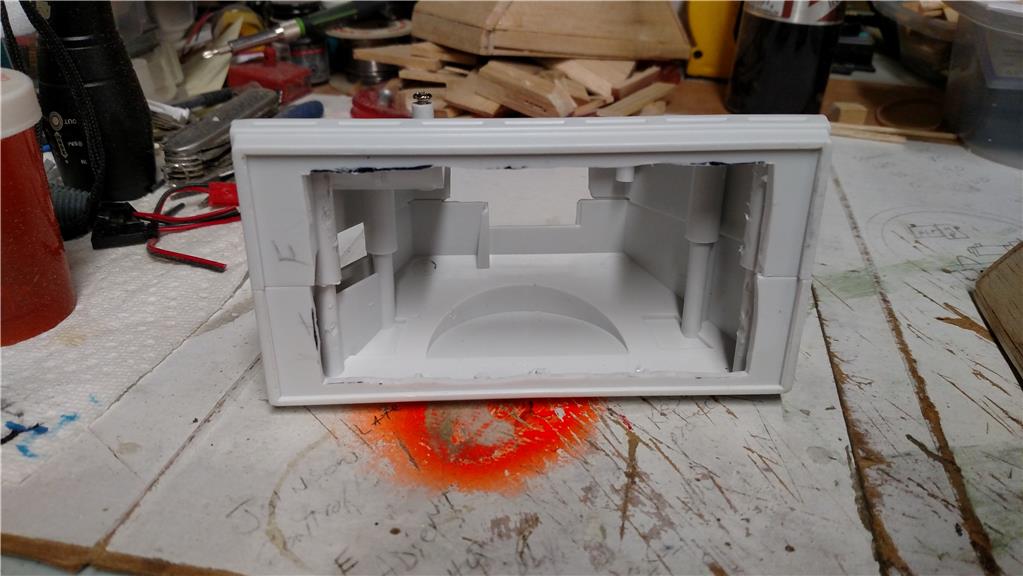
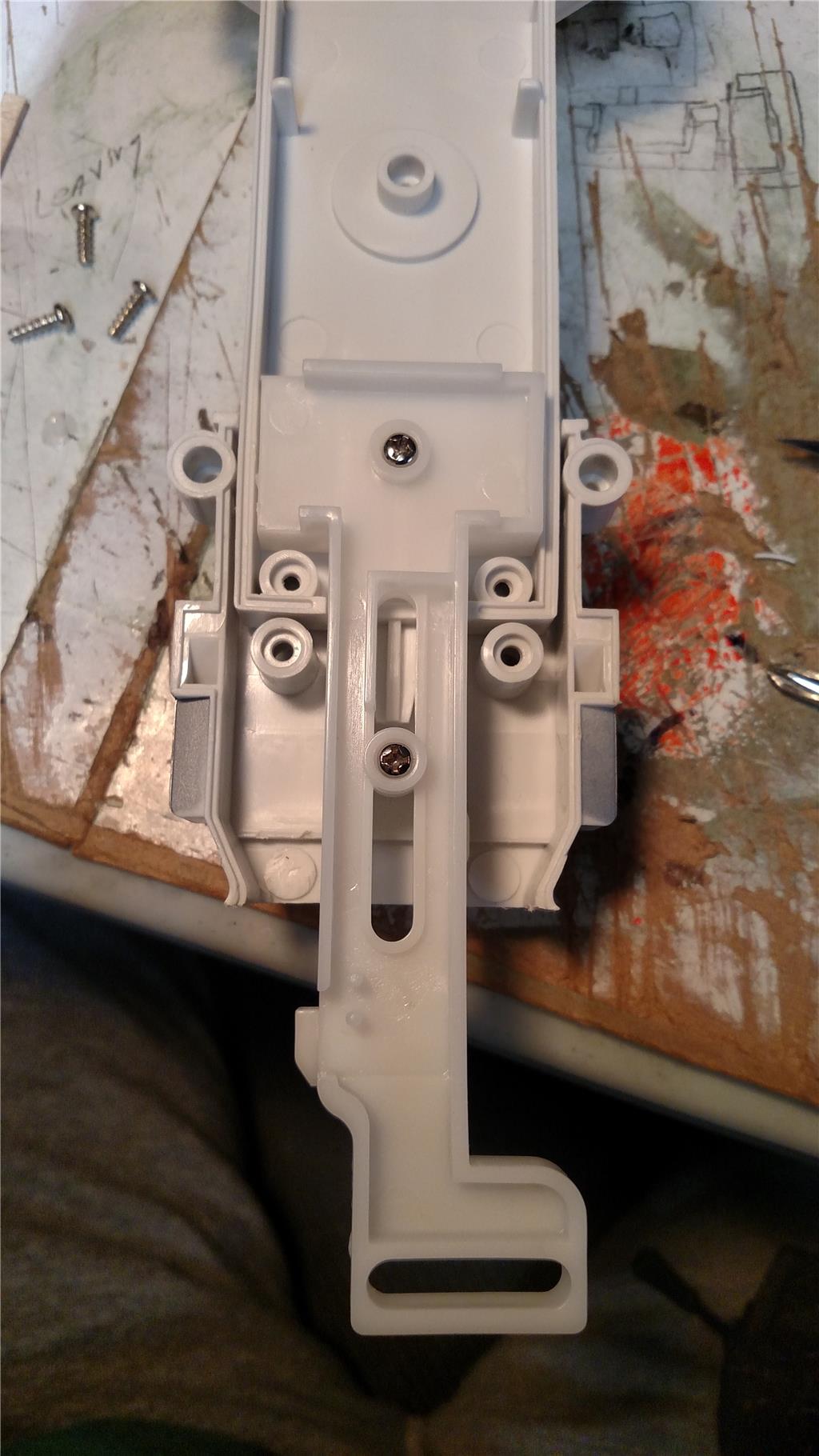
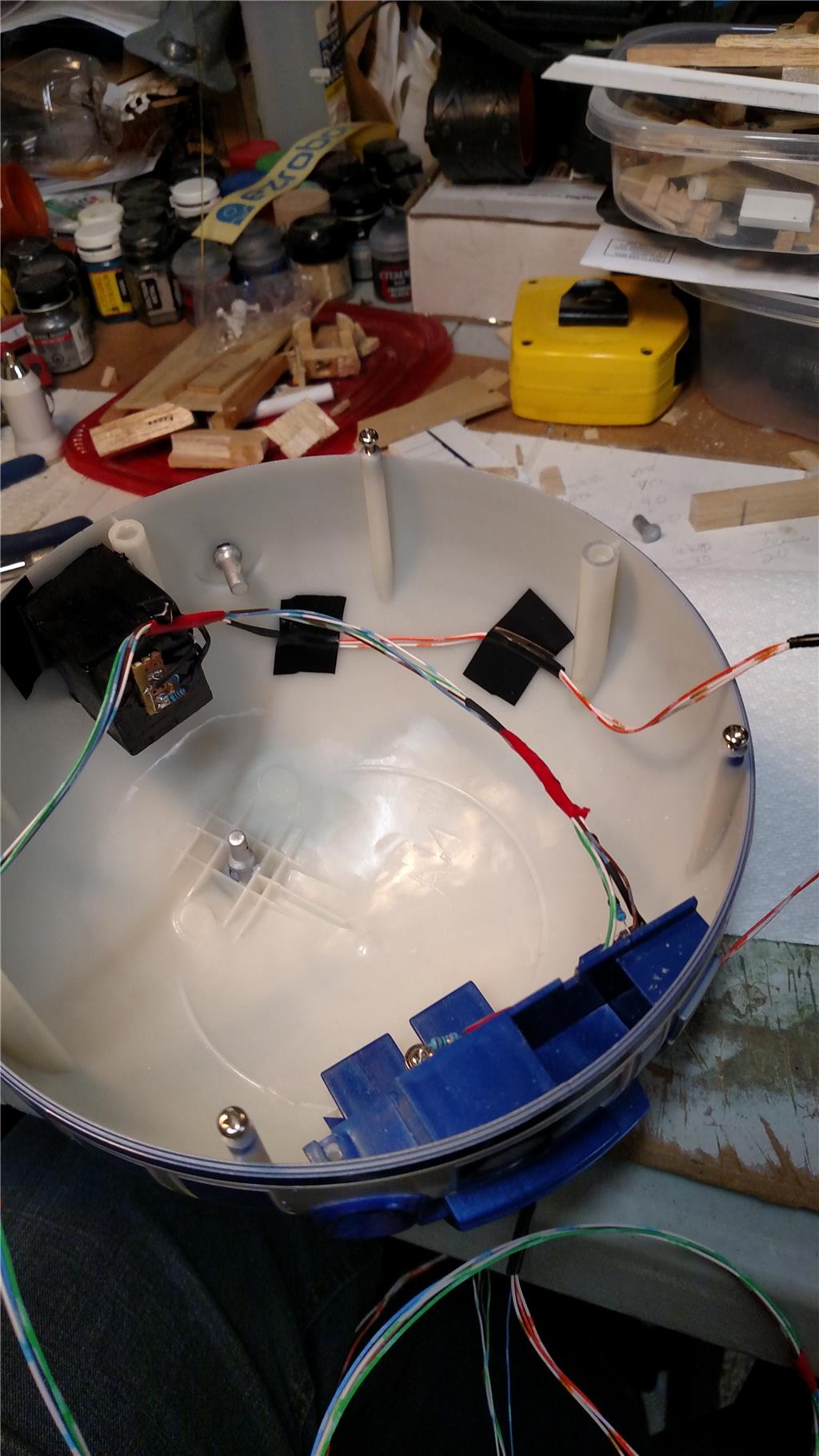
I figured out what the milky white colored piece is for within R2 one leg. When R2 is standing on his 2 legs and the center ankle/foot is retracted, he "bounces" around in what appears to be a "happy" kinda dance. That plunger (as someone called it) is for the "bounce" action. It will push/pull the ankle/foot up and down, therefore looking like R2 is "bouncing" and being "Happy". I have added a couple of photos with this post showing the plunger fixed in place as I believe it was when purchased. I am removing the "plunger" for the time being.
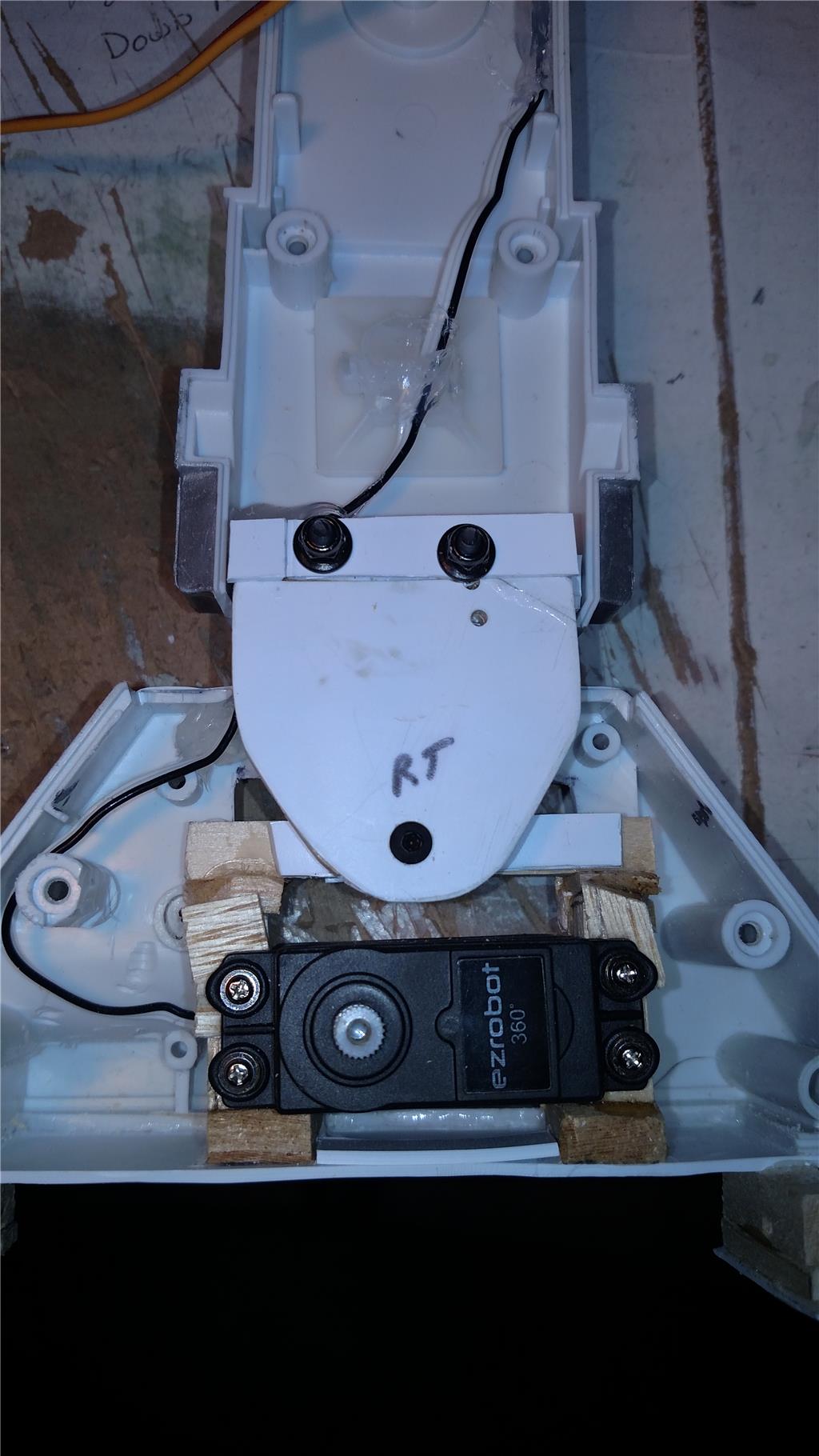
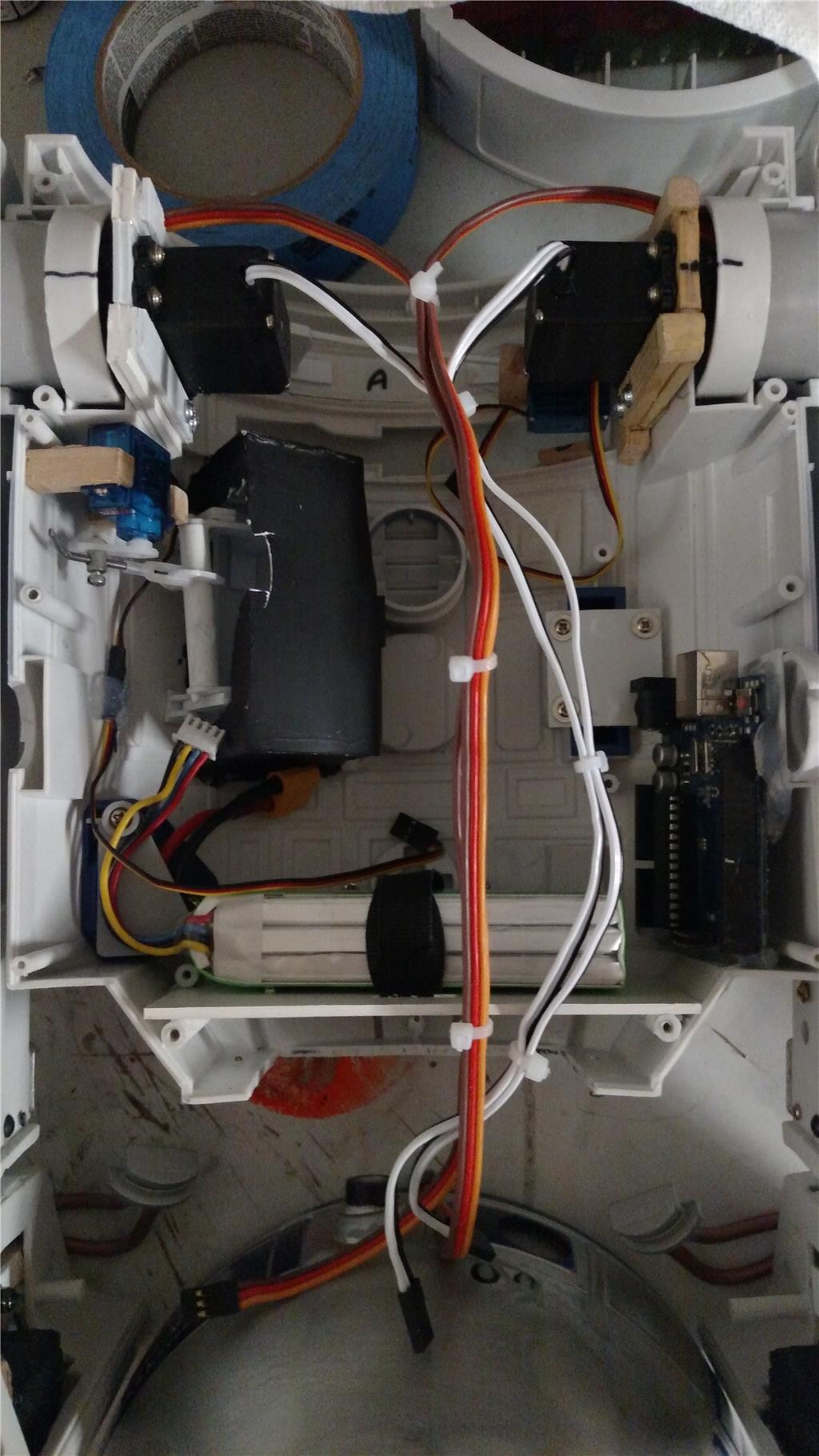
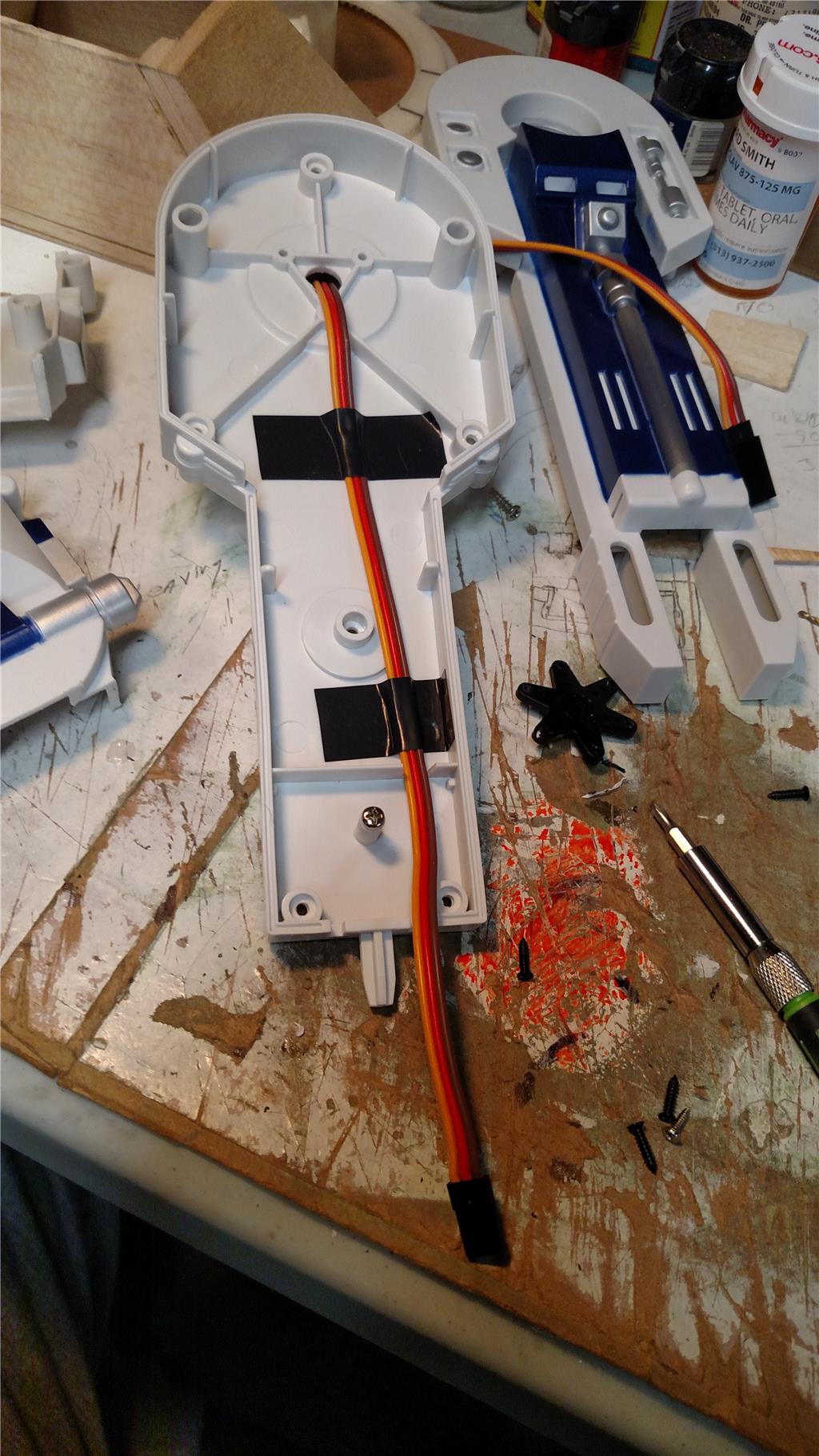
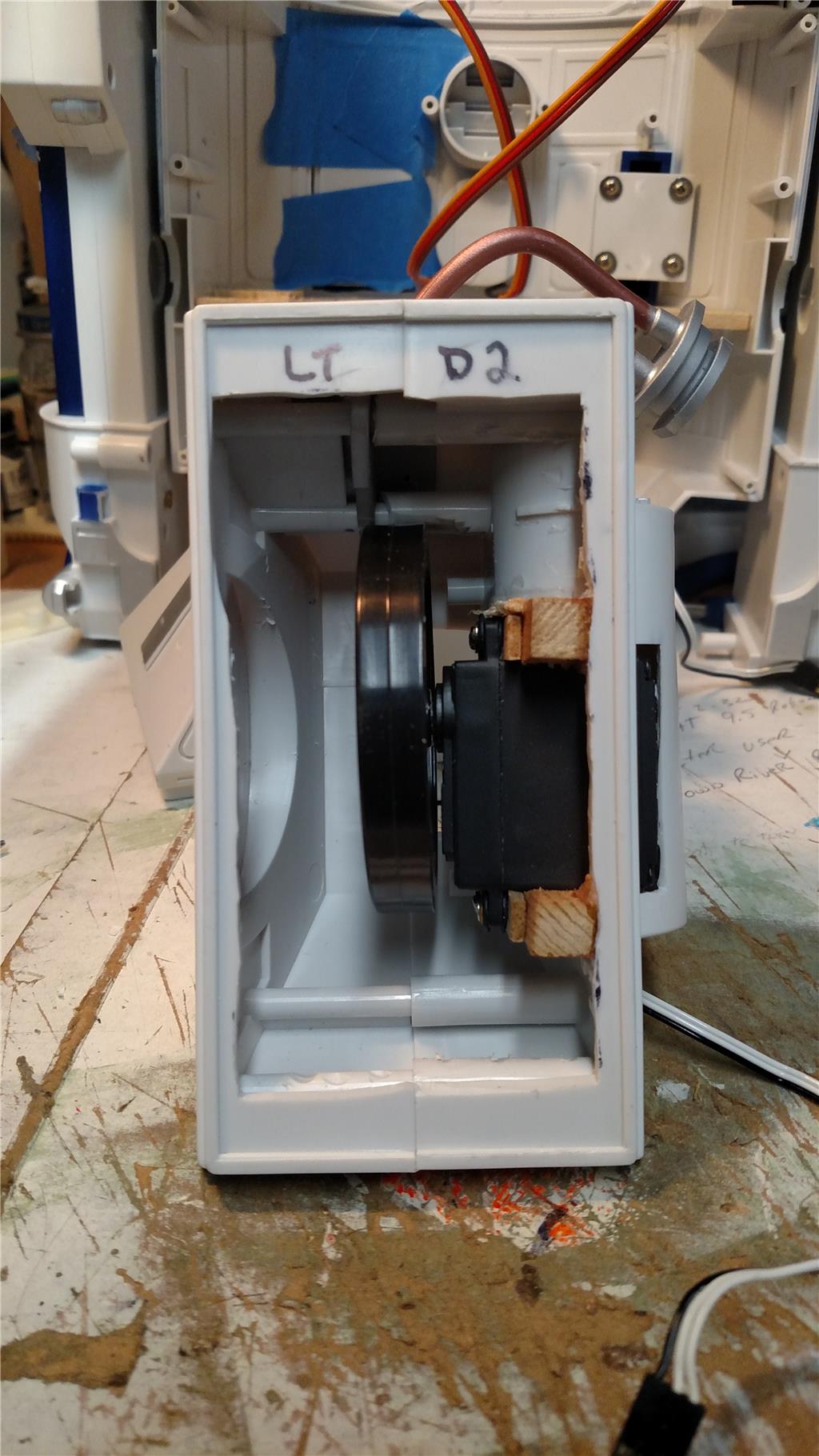
@AndyRoid or anyone that has used this R2 unit for a project did you by change take photos of the inside of the leg & ankle & foot before making any modification ? I didn't and with adding the continuous servos in both feet already I have missed my chance. I will add photos of my feet and how I set it up later tonight.
To make the "Bouncing" action, it looks to me like you would cut out a leg cross member that it stopping the plunger from moving, Also remove a screw, then add a servo to push/pull the ankle/foot up and down.