Robot Building Questions



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Gaming Mouse Pad

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

PCA9685 Servo Driver
Drive 16 servos over EZB I2C with a PCA9685 PWM controller, using ARC servo commands and...

Record and replay named servo movements with adjustable speed/direction (-5 to +5), multiple recordings, ControlCommand triggers and status var

Robotic arm overview highlighting design, capabilities and operation; creator available to answer inquiries and provide details.
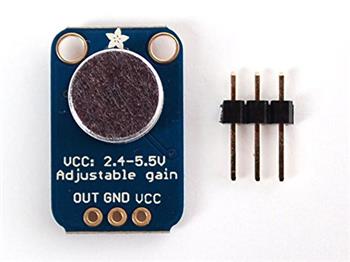
Sound Sensors
Hey Everyone! I am currently stuck on how to code these 2 sound sensors (1 on left, 1 on the right)(picture below) on the head of my robot. I have a servo (D18) that goes up to 180 degrees and I...Control Usage, Cross Reference
This weekend I changed the name of my soundboard control and then searched through the project to find and update all the references. It occured to me that it might be fun to build something that showed the relationship of items. I could do this with a spreadsheet but is it possible to use whats built into ARC? Example: Show all the places that...
Ezb Works Only In Jd, Not In Roli
Hi, today i have become for my Project a Rover. This works great, when i use the Rover in the torso from JD. But when i put this in my Roli, i have no...Vintage 80'S Robots
ha ha ya,very cheezy but cool ! I just saw an old 1986 movie about killer robots going crazy in a shopping mall and they look just like larger versions of all the toy robots sold back in those days! in fact they look much like my Paranormal chasing Rad 1.0 Bot,many of you may have something similar !---- "Chopping mall 1986" Chopping mall...Dynamixel Plug In Save Question
I have an issue where when I save a layout with the Dynamixel plug in and reload it, all the settings for each virtual servo revert to default settings of 1-180 regardless of what i set up in the dynamixel plug in. To fix it I have to open the dynamixel plugin and uncheck the servos, then enable them again then save it. After i return to the layout...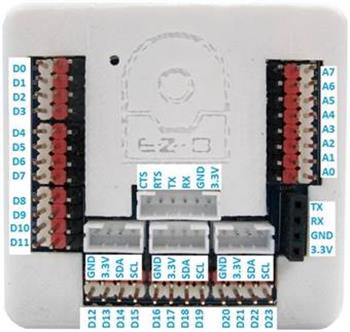
I2c Questions
I seemed to be having issues with I2C BlinkM's I keep adding the control to the layout and connect the blink M to one of the i2C ports and it disconnects the EZB, every single time. To make sure...
Looking For Servo Block When Using Roboscratch
Where is the Servo block or how can I add it to RoboScratch? Thanks.
Io-Tiny Cannot Find To Purchase In The Usa
I have been looking to purchase the Io-Tiny. I have looked at all the USA re-sellers as listed on the EZ-Robot Site. Most recently,...
Jd Head Pinned Forward
How do I get the head straight again once I connect JD to the software? I tried configuring the servos but they won't move. Thanks!Software Language
Hi @all, a lot german and french customers ask me.. is it possible to change the software language ?! I know it´s not but why ? it will be better for foreigners ^^! I mean all Text-Data of buttons, menu and apps same with the homepage :-) regards MartySmtp Client Question
Question: I have searched the EZ-Script Manual for SMTP Client, No success. I have searched the page from which the client is download from: No success. If there is help about this I do apologize in advance. The code works. I can email myself, what I would like to do is email other people. What is the syntax? Thanks WayneA.