All Community Content

Stay on the cutting edge of robotics with ARC Pro, guaranteeing that your robot is always ahead of the game.
Synthiam Credit

Your Synthiam Credit is $0.00
Discover ways you can lower the cost of Synthiam products by contributing to the platform and community.
Earn Synthiam Credit
Exosphere
Loading...

 Add Remote telepresence to control any robot from your phone or PC
Add Remote telepresence to control any robot from your phone or PC
Add your robot to Exosphere
Sythiam Swag

"I build robots" Hoodie
This heavy hooded sweatshirt is perfect for robot builders. The material mix of cotton and polyester provides warmth...
Recent Robot Skills

ZAMA Emotion Model
Valence-arousal emotion engine generating persistent, configurable robot moods and event-driven emotional...

Feetech RS485 Servo
Control Feetech serial-bus smart servos via EZB UART or PC COM port; map ARC virtual ports to servo IDs with...

Feetech Serial Bus S…
Control Feetech SC-series serial-bus servos via EZB UART or PC COM. Map ARC virtual ports to IDs; supports...

Featured
Sabertooth movement panel: control two motors via Simplified Serial with variable speed sliders, movement buttons, and serial port options.

Featured
Taller humanoid with longer legs and arms, added head servo and rearranged RGB lights for increased movement and articulation.
question
Wtb: Hasbro R2 Interactive
Hey All, Looking for a used R2 Interactive. Must be able to ship to Canada. If you have one kicking around, at a reasonable price let me know. Kris
Lumpy |
question

Ir Interferecne Device Idea
Lately I tore apart a remote control for a helicopter I lost years ago and I noticed that it uses 3 ir leds. then I thought, "my brother has been annoying me for...
jstarne1 |
question
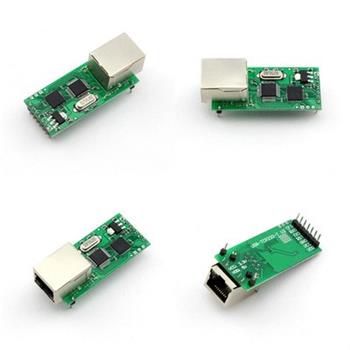
How To Connect Ttl To 10/100 Ethernet Module To ARC
Given interference I've seen at the maker faire I would like to use a wired connection from ezb to Ethernet then of...
jstarne1 |
question
Wireless Camera C# Question
Hi, can anyone help me to as in why my camera doesnt load in C# when I execute ? I wrote a C# program that basically detects the cameras on my laptop and then displays video, my built in camera works, but when I load the wireless camera the program terminates and no errors.. here s my code that I included, hopefully someone could answer this using...
zaidnr |
question
Robot Trash Can
Don't think I posted about this one yet. this guy made a robotic trash can and set up Kinect to tell the robot where the flying garbage is. go to the link and watch the vid. hackaday.com/2012/07/20/robot-trash-can-catches-anything-you-throw-near-it/
Rich |
question
Run A Script From Within A Windows Batch File?
Hello! Is is possible to open the ARC in the background and run a script - all at once, from within a windows batch file? Thanks, Roi.
roineust |
question

Omnibot 5402 Arm Length
what is the length of the omnibot 5402 right arm? interested in frankenstiening up my rad project AleX
CardboardHacke… |
question
No Support For Windows Vista?
I'm trying to update the ARC software, but at the download page it does not say/show support for Windows Vista. I have Windows Vista Home Premium. Will it be safe to download Version 2013.06.26.00 and install it on Windows Vista?...
Sanmarchav |
question
Mah Per Port?
I want to check what mah amount one port on the ez-b gives out. I think some one said a while ago it was around 25mah but I want to double check.
CardboardHacke… |
question
Midsize Modular Robot Kit Development Community Involvement
Hello friends, with the increased interest in larger robots thanks to EZB. I decided I may create some...
Jeremie |
question

New Rad Head Ideas
I have come to the conclusion that the rad 1.0 head will not satisfy me so I have gone on the hunt to build/create a new head. I have come up with the idea of a cardboard around the...
CardboardHacke… |
question
Balance Bot Demo Mma7455 Accelerometer
Here's a video of a balance bot concept with two wheels. Click To Watch Video $n=0 $D0Pos=GetServo(D0) $D1Pos=GetServo(D1) ServoSpeed(d1,0) $posA=50 $posB=50 :Top $n=$n+1 #print("MMAX=$mmAX MMAY=$MMAY MMAZ=$MMAZ n=$n") if ($mmay`>116) $posa=$PosA+2 servo(D1,$posA) #sleep(200) $posb=$posb-2 servo(D0,$posB) #sleep(200) endif...
winstn60 |