

Discover more robots
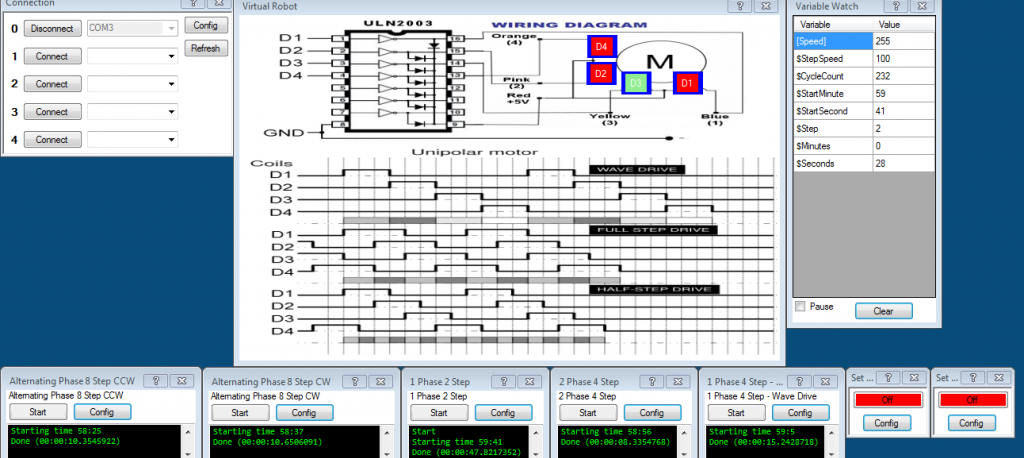
Leversofpower's Un2003a 28Byj48 Stepper Motor Project
Implement the UN2003A 28BYJ48 stepper controller for low-cost open-loop positioning; easy hardware setup; listed in...

Tachyon's My Next Project
Hack a RAD 1.0 robot toy new in box by installing EZ-Robot hardware for DIY robotics mods and custom control

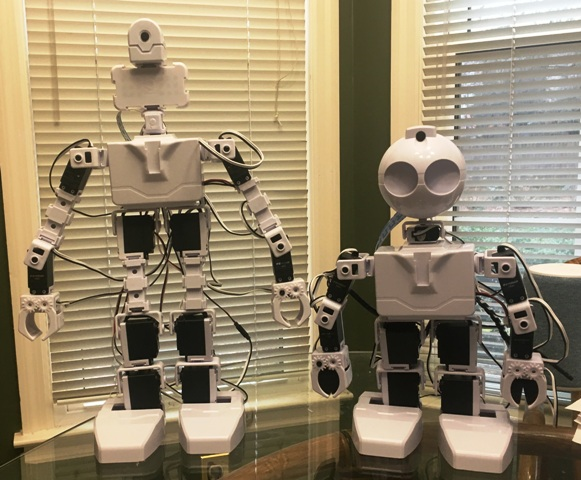
Lizpoir's Video From My Omnibot 2000 An From My 3D-Printing...
Watch two videos showcasing my robots in action, have fun.

Looks good but for the walking , a trick we used way back on the really tall Robosapien RSV2 or Media bots,we added some rubber to the bottom of the feet to get more traction when it would slip on hard floors.
Great, I see I need more traction
Thanks
i would use the cube's to start trying to make a walking gait. it will be very hard to do with the large Extension Block.consider you dont us a gyro. with a big robot is also a good idea to make or use alu brackets insteadt of plastik ones, they tent to bend a little.look at many video about making walking gaits. see what all these robots do when starting to walk.NAO,WALKER,BIOLOID, they all do desame pose when starting to walk and that is bending the knees a little. also NAO name it the adaptive walk.jd bend his ankle on knee hight, all other robots have movement on the ankles forwart/backwarts/left/right.