Robot Building Questions



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
Gaming Mouse Pad

Autonomous AI
Autonomous AI robot agent with vision, speech, movement, animations, memory, and self-directed task...

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

Bluetooth control for UBTech Alpha1 servos via ARC: map Vx to servo IDs, enable servos, and integrate with ARC movement & LEDs.
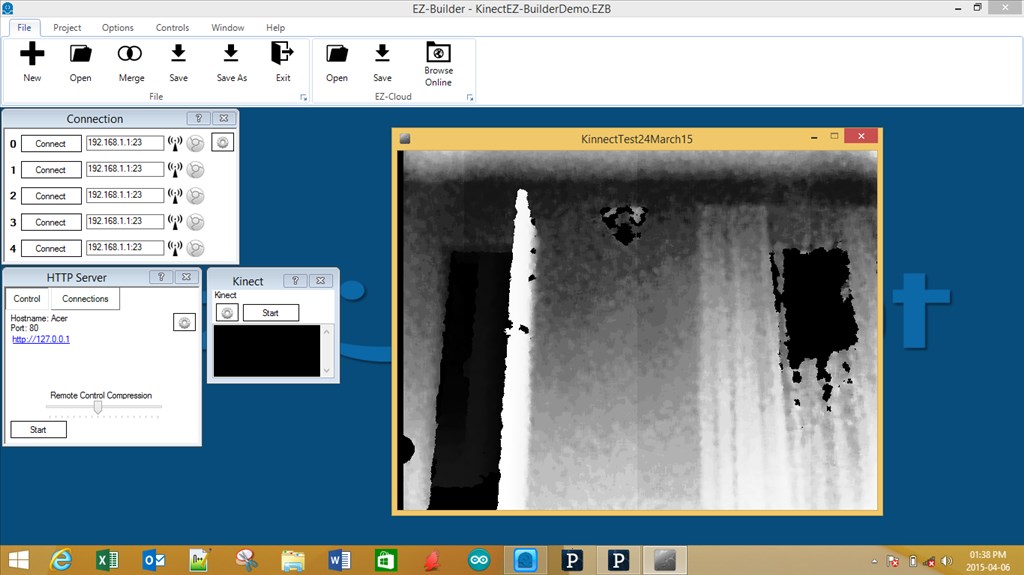
Control EZ-Robot Revolution JD with Kinect Xbox 360 using Synthiam ARC, Processing and EZ-Script to mirror body joint angles to servos.

How Do I Make Bing Speech Recognition Not Trigger From Spoken Chatgpt Response?
Is there a variable or method to know when servos have stopped...Bing Speech Wake Word Not Working
Hello All- I upgraded to ARC Pro 2023.11.15 and the wake word is not working anymore. I did remove Bing Speech and re-add it, no luck on wake word working. Any suggestions? I did reboot the computer. Bing Speech works fine with pressing the recording button and with VAD.Azure Text To Speech, Talk Servo V2 Not Working
Hello All- Im sure im missing something, but here is what Im working with. EZ robot head- Azure Text to Speech Bing Speech Recognition with VAD OpenAI ChatGpt Everything works great but cant get the mouth to move from response "Using speaker from robot head" Azure selected to use "Speak out of EZB" If I dont use Azure text to...
Speed Vs Velocity Configuration
Why is there the option to set both the speed and the velocity parameters in the Actions tab of the Auto Position configuration panel?The Ratio Setting Does Not Stay As Programmed For The Control Of Feetech Servos
How can I make sure that the ratio setting stays as programmed for the control of feetech servos?
Connection Issues
I can't connect my EZ-B to my computer, and the tutorials are not helping. I'm able to get the wifi connection running, I boot up ARC, but the debug log says... Connection Failed:...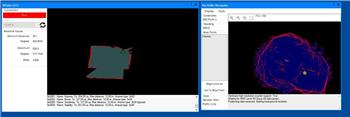
Rplidar A1 And Better Navigator
I have connected the A1 lidar and I can see the mapping on RP lidar, but on the Better navigator, I just see lines without the map shape. I had followed the...Can EZB Firmware Be Created For Arduino Nano?
DJ, is there a way you could add firmware support for the Arduino Nano board? I am in need of a small form factor Arduino that I can connect to ARC using USB that has at least 6 PWM and 6 ADC ports.