rob.knight
France
Asked
Speed Vs Velocity Configuration
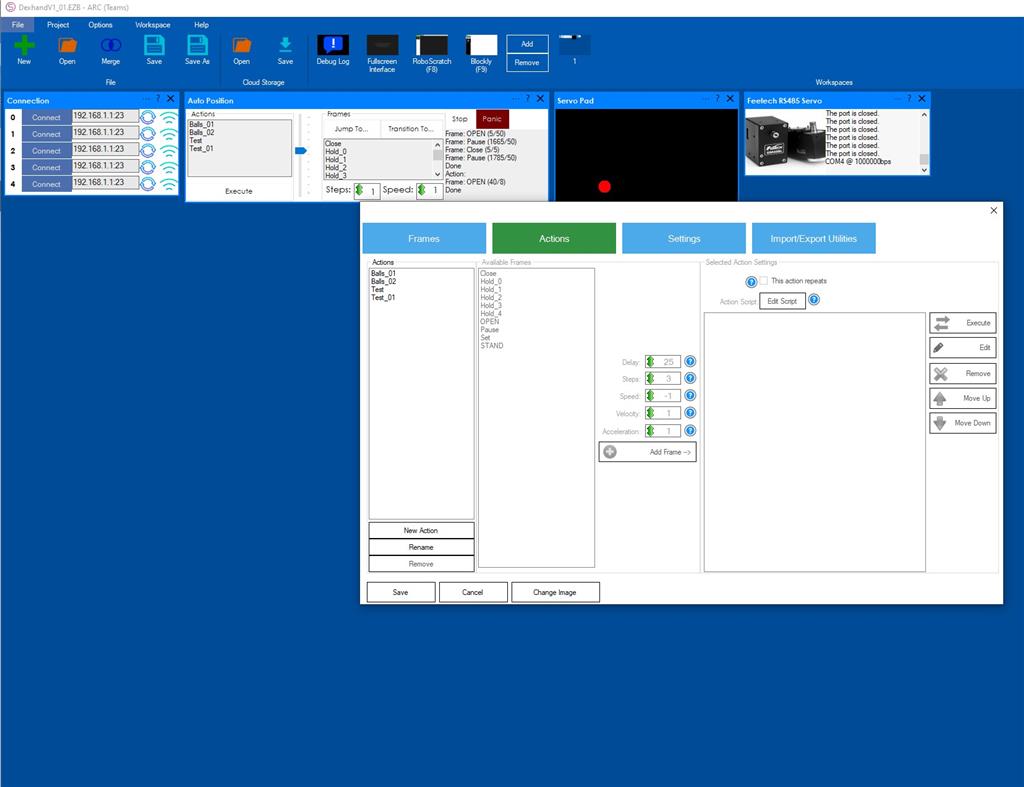
Why is there the option to set both the speed and the velocity parameters in the Actions tab of the Auto Position configuration panel?
Related Hardware (view all EZB hardware)

Arduino Due/Mega
by Arduino
Synthiam ARC enables Arduino Mega 2560 control with 8 ADC, 13 PWM, 21 digital ports and 24 servos; includes firmware, shield and tutorials
USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
21
Related Robot Skill (view all robot skills)

Auto Position (Gait)
by Synthiam
Create servo frames and actions to animate gaits and gestures with automatic motion planning, software ramping, movement panel, import/export

What's the difference between speed and velocity settings?
In the context of the Auto Position (Gait) skill in ARC, the terms "speed" and "velocity" are often used interchangeably to describe how fast a servo moves from one position to another. However, in physics, these terms have distinct meanings:
In the Auto Position (Gait) skill, when you are setting up actions and frames, you will encounter settings for "speed," "delay," and "steps," which control the movement of the servos:
The "speed" setting in the Auto Position skill effectively controls the velocity of the servo movement, but it is typically referred to as "speed" within the ARC software for simplicity.
For more detailed information on how to use the Auto Position (Gait) skill and configure the movement of your servos, you can refer to the Auto Position (Gait) documentation on the Synthiam website: https://synthiam.com/Support/Skills/Servo/Auto-Position-Gait?id=20314
Why is there the option to set both speed and velocity?
Why is there the option to set both the speed and the velocity parameters in the Actions tab of the Auto Position configuration panel?
In the Auto Position robot skill within ARC, you have the option to set both speed and velocity parameters for servos because they serve different purposes in controlling the movement of your robot.
Speed: This parameter determines how fast the servo will move to its target position. It's a value that typically ranges from 0 to 100, where 0 is the slowest speed and 100 is the fastest. By adjusting the speed, you can control how quickly a servo transitions from one position to another.
Velocity: This parameter is used to define the rate of change for the servo position over time. It's particularly useful when you want to create smooth and natural movements by controlling the acceleration and deceleration of the servo. By setting the velocity, you can make the servo start moving slowly, increase to full speed, and then slow down again before stopping at the target position.
Using both speed and velocity settings allows you to fine-tune the movement of your robot's servos to achieve more realistic and controlled motions. For example, when programming a walking gait or a dance routine, you might want the robot's limbs to accelerate smoothly at the start of a step and decelerate smoothly at the end, which can be achieved by adjusting the velocity parameter in conjunction with the speed setting.
For more detailed information on how to use the Auto Position robot skill, you can refer to the support documentation on the Synthiam website: https://synthiam.com/Support/Skills/Movement-Panels/Auto-Position?id=16023
In the Auto Position (Gait) skill within ARC, you have the option to set various parameters for each frame within an action. These parameters include Delay, Steps, and Speed, which all influence the movement transitions between frames in an action.
Here's a brief explanation of each parameter:
Delay: This is the amount of time (in milliseconds) that the system will wait between sending servo position updates. A higher delay will result in a slower transition between frames.
Steps: This determines the increment size of the servo position for each update. A smaller step value means finer movements and more steps to reach the final position, which can result in smoother motion.
Speed: This parameter sets the speed at which the servo moves. It's a value that some servo controllers use to determine how fast the servo should travel to its destination position.
The reason both speed and delay parameters are available is to provide you with greater control over the motion of your robot. By adjusting these values, you can fine-tune the movement to be as smooth, fast, or slow as necessary for your specific application.
For example, if you're creating a gait for a walking robot, you might want the leg movements to be smooth and deliberate, so you would use smaller steps and adjust the delay and speed to achieve the desired walking pace. On the other hand, if you're creating an action for a quick wave, you might opt for larger steps and a higher speed to make the motion more abrupt.
It's important to experiment with these values to find the right balance for your robot's movements, as different robots will have different requirements based on their design and the tasks they are performing.
For more detailed information on how to use the Auto Position (Gait) skill, you can refer to the support article on the Synthiam website: https://synthiam.com/Support/Skills/Servo/Auto-Position-Gait?id=20314

Speed only goes up to 20 - is it more like a smoothing factor?Hello,
Some servos have different parameters that can be configured. Surprisingly, some servos have speed and velocity, while others have only one. It is up to the servo manufacturer to determine what parameters and values they use. You can check with your servo model to determine if both speed and velocity are used or only one.
The Auto Position servo parameter option is the same as the advanced servo menu used in other robot skills. You can find details about that here: https://synthiam.com/Support/ARC-Overview/Servo-Controls
In addition, the Auto Position manual is extensive and explains the options here: https://synthiam.com/Support/Skills/Servo/Auto-Position-Gait?id=20314
*Note: please do not spam the forum with duplicate questions. I have moved the duplicates into this thread to keep the forum organized for others. Thanks!