All Community Content



Drive Real Robots, Anywhere
Remotely operate robots around the world or add live telepresence to your own build — straight from your browser.
Discover Exosphere
"I build robots" Hoodie

Advanced Speech Reco…
Azure Cognitive Speech recognition for ARC with custom API credentials, scripting, language control,...

Audio File Out EZB
Stream MP3 or WAV files from your PC to the primary EZ-B speaker for robot audio playback, alerts,...

PCA9685 Servo Driver
Drive 16 servos over EZB I2C with a PCA9685 PWM controller, using ARC servo commands and...

Capture any screen area and stream video to a configured camera device; requires a Custom device and 100% display scaling.

Link Unity 3D to Synthiam ARC using Flask and Python to send virtual servo positions to real servos, sync motion via COM serial.
Wireless RPLIDAR A1 With Raspberry Pi
Can I Make RPLIDAR A1 Work Wirelessly with ARC Using Raspberry Pi 4? Hi everyone, I'm working on a robotics project and I want to use the RPLIDAR A1 sensor wirelessly with Synthiam ARC. I was wondering if it's possible to stream LIDAR data over Wi-Fi from a Raspberry Pi 4 (connected to the RPLIDAR via USB) to ARC running on my Windows laptop. My...
Building Autonomous Robot For Terrain Cleanup
Mitch Torri, the owner of ASI in Mendon, Utah, generously provided my V2R_AG_Robotics 4H club with a robot project reminiscent of...Understanding Servo Resolution In ARC
Could someone help refresh my memory on servo resolution settings in ARC? I'd like to revisit this topic to better understand how it affects my robot's performance. I'm using the high-quality, low-cost EZ-Robot HD servos in my robot. I love that they're quiet and durable under tough conditions. I've explored the Support section on the Synthiam...Synchronized LED Blinking Iotiny
Hello, Athena! I am trying to use the PWMRandom(D6, 0) and PWMRandom(D7, 0) commands to control two LEDs, simulating human-like blinking simultaneously. I'm utilizing the IoTiny controller for this project. Could you please advise on how to achieve this synchronized blinking effect? Thank you!
Trouble Uploading Robot Project
Hi, I'm having trouble uploading a new robot project. The page isn't recognizing my YouTube video. I'm finding it quite challenging to understand all the...ARC Remote UI Network Password Issue
I am experiencing an issue where the network password is not being recognized when trying to view a user interface in Synthiam ARC through the Remote UI feature on my Android Galaxy S20, using the app downloaded from the Play Store. Initially, after setting up everything on my phone and configuring ARC, I was able to view the user interface I...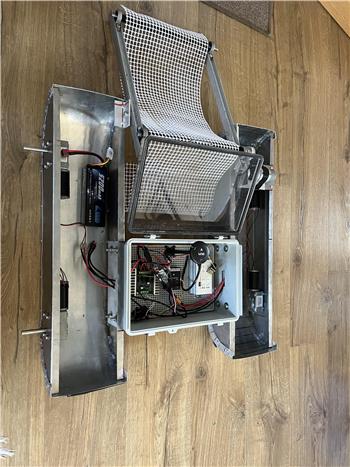
Sabertooth Controller Red Error Light
I'm working on an autonomous boat for a university/school project designed to collect rubbish from lakes. It features a front-mounted conveyor...Minimum Screen Resolution For ARC
What is the minimum recommended screen resolution for running the ARC application on a Windows PC? I am currently evaluating Single Board Computer (SBC) displays and need to know if there is a recommended user interface resolution for ARC. I've been unable to find this information within the ARC system requirements.
ARC Remote UI App Compatibility Query
I have a question regarding the ARC Remote UI app. On the Interface Builder skill page, I observed that there is only one available link for...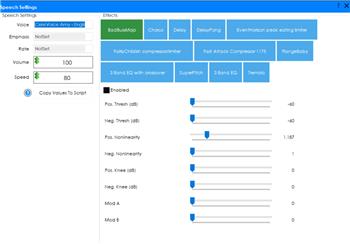
Issues With Third-Party Voices
I have a question regarding the Speech Synthesis Settings in the ARC software. Hello, I recently purchased a new voice from CereProc and installed it...
Multiple Rplidar Skills Issue
I have a question regarding the RPLidar robot skill in Synthiam ARC. Why am I unable to create multiple instances of this skill within my project? DJ, I'm...