
finbarnr
Sabertooth Controller Red Error Light
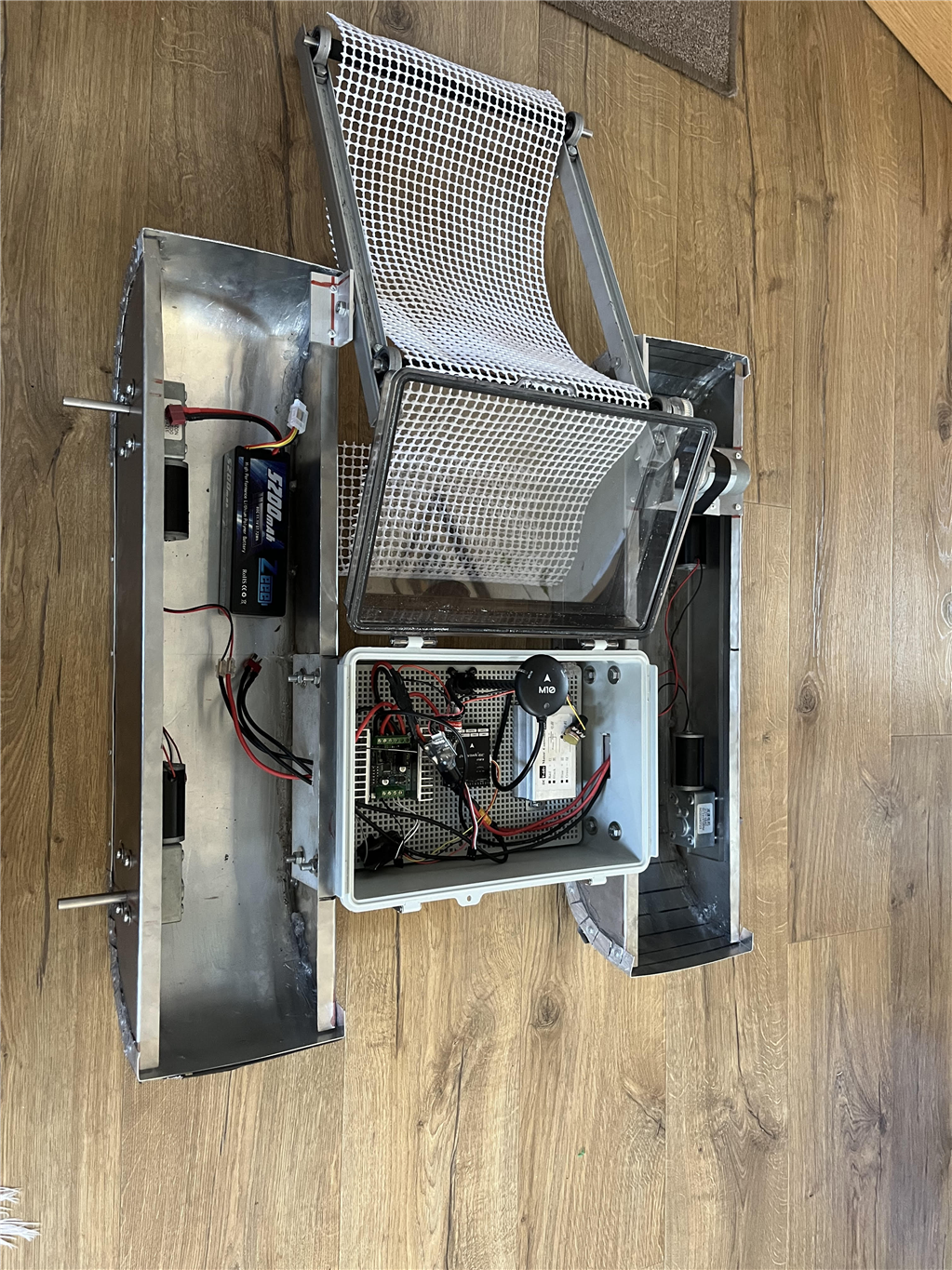
I'm working on an autonomous boat for a university/school project designed to collect rubbish from lakes. It features a front-mounted conveyor belt for debris collection and uses four paddlewheels for differential thrust steering. For navigation, I'm using a Pixhawk autopilot system. The motors are driven by a Sabertooth 12 Amp dual motor controller, while a fifth motor operates the conveyor belt through a simple on-off remote switch.
Unfortunately, I fried my Sabertooth controller. It started showing a red error light and emitting a high-pitched noise when I connected the second signal wire from the receiver for the second motor. This red light and sound happened without any throttle input or control adjustments. After restarting, the controller completely failed, and I'm now worried about what might have caused the short or overload, because the motors dont draw much power and there are verty little ways it can short circuit. I'll include some images to illustrate the setup for clarity and troubleshooting.
My project deadline is Friday, and I've ordered a replacement Sabertooth controller. So really don't want to fry that one too, because it arrives on Thursday. This is a last ditch effort to save my grade, because the project doesnt really do much right now. Any advice advice would be amazing, thanks so much to anyone who replies. I'm pretty new to electronics, this is my first major build, so there might even be something blindingly obvious. If you spot anything please do reply. Cheers

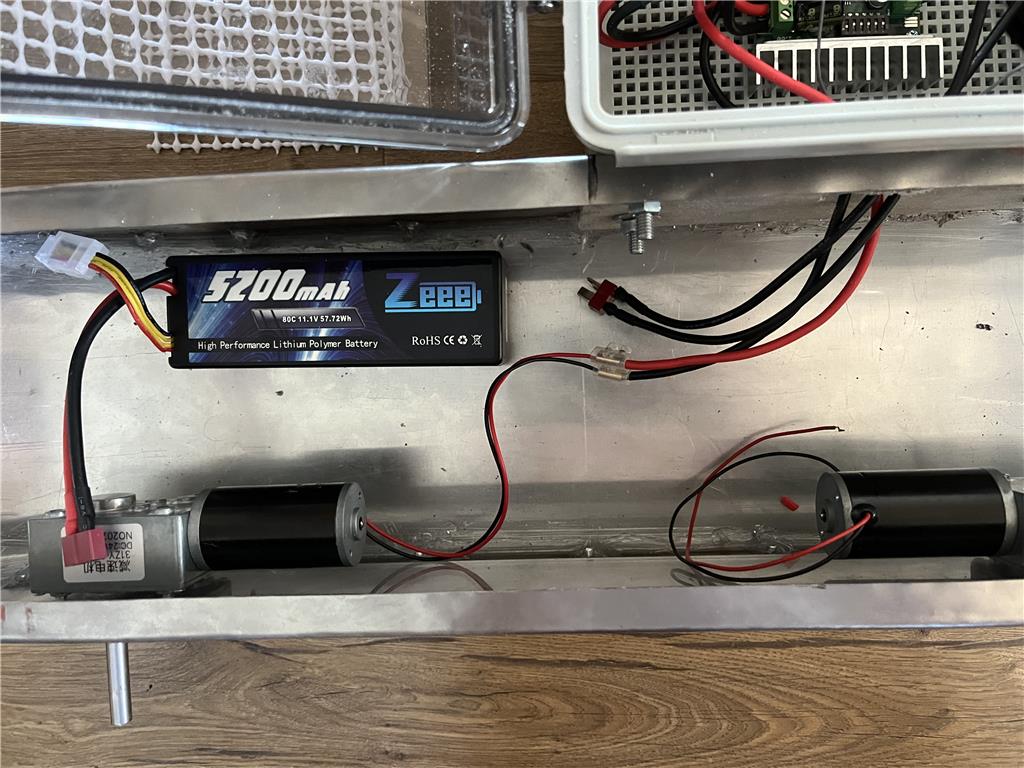



My first thought is you may have connected the battery backwards to the Sabertooth. Connecting the battery backwards will destroy the Sabertooth. Looking at your picture it looks to me that you do have these connections correct but look here first.
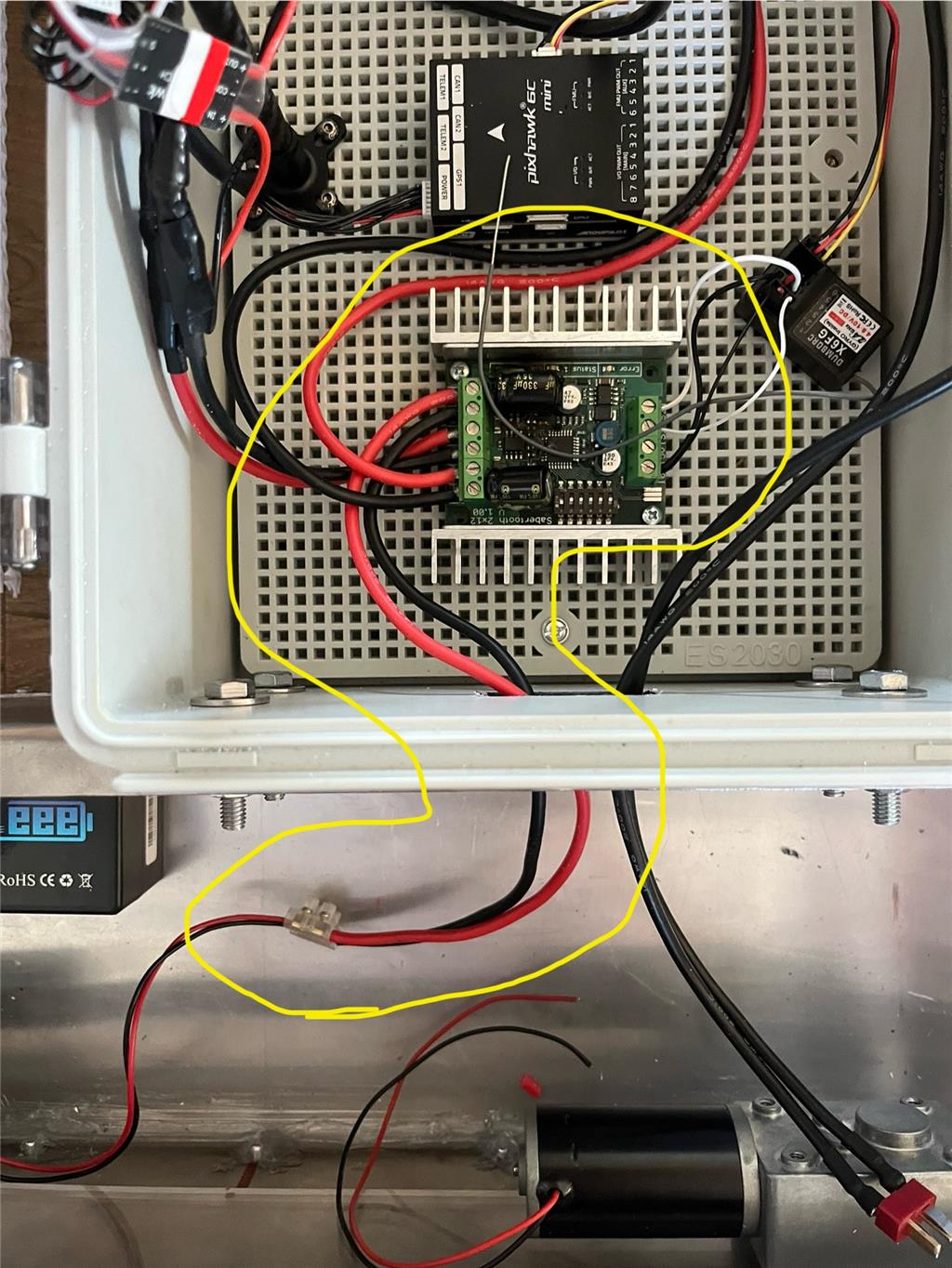
However you say things went bad when you connected the second signal wire from the receiver for the second motor. I'm not sure what you mean by this. If you are talking about the signal wires from the Pixhawk to the input ports of the sabertooth then these wires control both motor channels, not just the second motor.
Are any of the other LED lights coming on or just the error light? The red Error LED illuminates if the Sabertooth has detected a problem. It will light if the driver has shut down due to overheating or overcurrent. Are you supplying the proper voltage to the Sabertooth? Recommended power sources are: 5 to 18 cells NiMH or NiCd 2s to 6s lithium ion or lithium polymer. Sabertooth motor drivers have a lithium battery mode to prevent cell damage due to over-discharge of lithium battery packs. 6v to 24v lead acid 6v to 24v power supply (when in parallel with a suitable battery).
From DE's website on troubleshooting the Motor Controller: An Error indication should not be ignored. If it is determined that the error is not due to an input voltage issue, there are three common scenarios to investigate.
*Another common cause of current-limiting is using a DC power supply unit without a battery in parallel. A PSU cannot sink the regenerative current from the motor driver, so a battery must be put in parallel. (The Sabertooth 2x32 has a built-in voltage clamp which allows it to be used with a PSU alone. See the datasheet for more information.)
Ignoring excessive current-limiting and/or using a PSU without a battery in parallel can lead to damage such as firmware corruption or processor damage.
A flashing Error can also indicate a short has been detected or sustained- see #3.
A glowing Error LED combined with no motor output and a hotter than normal motor driver usually means the driver has gone into thermal shutdown to protect itself and the motors. Turning the driver off and allowing it to cool resolves the issue. If this is a frequent occurrence, the driver may not be powerful enough for the application, or is in need of more airflow or heatsinking. See the motor driver datasheet for more information regarding proper mounting techniques.
A glowing or flashing Error LED during power-up and/or when a command is sent to the driver can be an indication of hardware damage- most likely due to a short detected or sustained on a motor terminal. Disconnect the motor(s) to see if the Error ceases. If so, verify the motor is in good working order and that it has been correctly wired to the motor driver. If the Error persists without motors connected , then it is likely the driver has sustained permanent damage and will need to be repaired or replaced.
The whole troubleshooting article can be found here: https://help.dimensionengineering.com/knowledgebase.php?article=16
So, *Check your voltage level and make sure your battery is connected in the right direction *Recheck all wiring and connections *look for shorts or burnt out devices and electronic parts *Check that your motor is not bad (may be shorted internally) or frozen up
I know nothing of the Pixhawk, how it works or how it should be wired. Is it compatible with a Sabertooth? Revisit its application and how to connect it to a motor controller. It should work as the Sabertooth can be commanded in analog, R/C and serial input modes. Check that you set your dip switches on the Sabertooth properly for the way you are imputing the command signal. Make sure your signal wires are connected to the proper input port on the Sabertooth.
Also if you haven't yet done so please read through the entire 2x12 Sabertooth manual here: https://www.dimensionengineering.com/datasheets/Sabertooth2x12.pdf
I hope this helps. Let me know if you need any clarity on any of this. If I know how, I'll help. Good luck and I hope you get an A on your project. It looks like a great build. Please let us know how it works out.
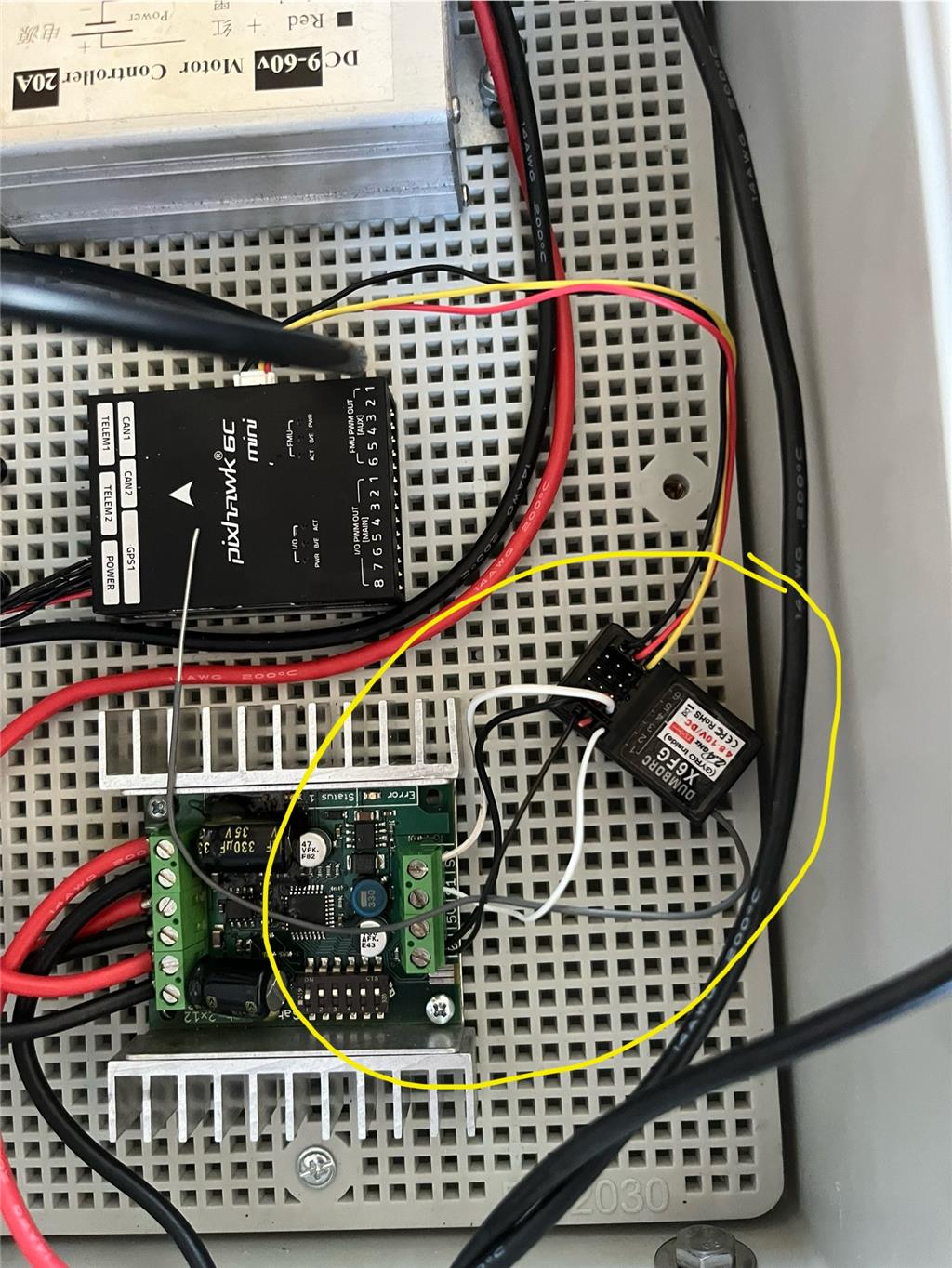
In addition to my above post I had a close look in your picture at your dip switch settings on the Sabertooth. What mode are you trying to run in? I would "guess" that you need to be in RC mode? Does your Pixhawk send RC signals from a hand held RC controller?
Looking through the 2x12 Sabertooth manual I see you have all dips set to ON (or Up) except dip 1. That one is off (or Down) . That would indicate you have the ST in RC Mode. However, this being a wheeled (paddle wheel) do you want it also set to Mixed mode? This would let the ST automatically operate the wheel motors like a tank.
I don't think this is what caused your controller to turn the error light on but check your dip switch settings and make sure they are set to the way your sending commands.
Again the error LED light comes on when the ST has detected a problem due to overheating or overcurrent.