
smiller29
Multiple Rplidar Skills Issue
I have a question regarding the RPLidar robot skill in Synthiam ARC. Why am I unable to create multiple instances of this skill within my project?
DJ, I'm encountering an issue with the latest version of ARC. In my current project, I am using two RPLIDAR A1 (Standard Edition) units. The problem arises because ARC does not permit me to add two separate RPLidar skills to accommodate both lidar devices.
Additionally, I've noticed a connectivity issue when both lidars are connected to my PC. One is connected on COM3 and the other on COM12. When I select COM3 in the skill, it connects and functions properly, but if I switch the skill to COM12, it fails to connect. Can you provide guidance on how to resolve these issues or if there are any steps I'm missing?
Related Hardware (view all EZB hardware)
Related Robot Skill (view all robot skills)


Okay, superb - the message states to let us know if you need multiple copies. You'll find that documented in a release note a few weeks ago for ARC. Because robot skills could be added as many times as ppl wanted, some cannot be added multiple times due to their development limitations. And because of that, many ppl were breaking their projects by adding 10 copies of Chat GPT for no reason, for example. So now if a particular robot skill requires multiple copies, we must enable it.
I'll do that now for ya.
Okay - it's updated - you'll be prompted when you restart ARC with an internet connection. I don't have permissions to update the release notes on the robot skill page, so we'll have to wait for synthiam support to do it tomorrow. But it should be v21
Ok thank you DJ, I did not read the release notes so I was not aware. I will try it again and let you know if I am still having the COM port issues. If I do I will provide all the details I can to try and help you locate the issue.
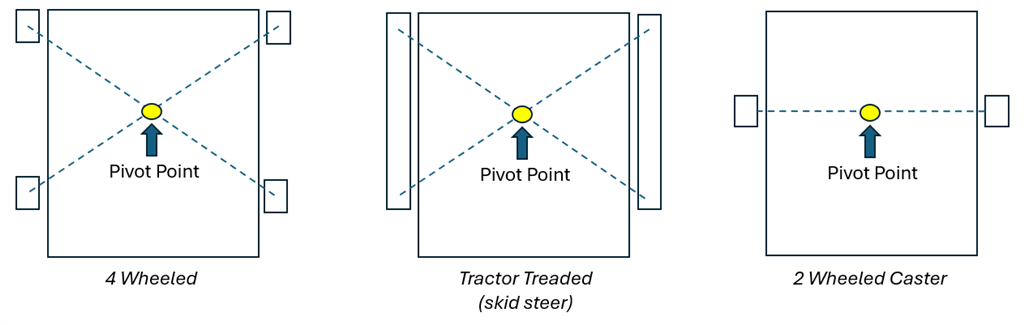
As I follow this conversation more closely, it's impossible to achieve. I understand there may have been a conversation before about locating two lidars. However, a Lidar uses a 360-degree rotation to scan the environment for distances from its center. For a lidar to work correctly, it needs to be placed in the center of the robot, and the robot must pivot on its exact center. See how an iRobot Roomba or other lidar-equipped vacuum is designed-because that's the most accessible reference.
Using a lidar in any application requires adding it to the exact center of the robot. To recap, the robot must rotate at the pivot of the center.
Due to a lidar's 360-degree rotation, it needs to be in the center of the robot.
Lastly, you will find that there is no option for a Lidar physical offset for this reason. Because a lidar scans 360 degrees, it's meant to do so from the center of the robot.
Below is an update that summarizes what is happening based on your conversation:
Multiple RPLidar Skill Instances
DJ_Sures has updated the RPLidar robot skill (version 21) so that you can now add multiple instances to your ARC project. This change was made because some skills (like Chat GPT) were being added in multiples without a true purpose, while others-like RPLidar-have their own development limitations that previously prevented multiple copies from being used. The update should now prompt you with multiple copies enabled when you restart ARC with an internet connection.
Regarding COM Port Connectivity
If you continue to experience issues when switching between COM ports (for example, when one unit works on COM3 while another fails to connect on COM12), please note the following points:
COM Port Assignment:
Ensure that when you add a second instance of the RPLidar skill, you select the correct COM port for that device. Sometimes, a port conflict or resource sharing issue may arise if both devices are not being managed correctly by ARC.
Device Driver & Connection Issues:
Verify that your PC recognizes both lidars correctly and that no other application is trying to use those COM ports. A potential conflict in the drivers or how the LCD firmware handles serial communications could cause one of the devices not to connect.
Further Details:
If you still experience COM port issues, please provide a detailed description (including screenshots if possible) of the error messages, COM port settings, and any other clues. That information greatly helps troubleshooting.
Physical Setup Note
Synthiam_Support has also pointed out that-from a physical design perspective-a lidar is intended to work from the center of the robot. Since a lidar uses a 360 rotation to scan distances evenly around its center, both lidars (if you intended to use them for redundancy or data fusion) should be mounted in positions that meet the proper design criteria. If placed off-center, the data could be inconsistent since the robot must pivot exactly at its center for a meaningful scan.
If you’re attempting to use the two lidars as a workaround to cover different areas of the robot (by applying different physical offsets), please note that the RPLidar robot skill does not offer an option to adjust for a physical offset because the core scanning principle requires a centralized position. In this case, the recommendation is to plan your robot’s layout similarly to a vacuum robot (such as an iRobot Roomba) where one properly centered lidar typically serves your navigation requirements.
Next Steps
Restart ARC:
Make sure ARC is restarted with an internet connection so that the updated version (v21) is applied. Then add the multiple copies of the RPLidar skill and assign them to the correct COM ports.
Test COM Ports:
Verify that each lidar device connects to its assigned COM port. If a COM port fails to connect, double-check that the device isn’t conflicting with any other application or device driver.
Physical Considerations:
Re-assess your physical robot design to ensure that each lidar is being used in a way that respects its 360 scanning constraints (i.e., ideally at or near the robot’s center).
Feel free to reach out with additional details if you run into further challenges or need more guidance configuring your project. We're here to help you get the most out of ARC and your robot skills.
Let me know if you have any more questions or need further clarification!
Well, I wish I would have known this before I spent hundreds of dollars on parts and materials not to mention almost a year of development based on the fact, I was told it would be the way to do it.
Hold on here. I think there's a bit of confusion that support's not aware of yet. Yes, traditionally, the lidar should be in the center of the robot. But due to several recent conversations on this forum about the location of the lidar, we've been looking into moving it. So yes, I know it used to be in the center. But we've been doing work to add that functionality. Specifically, dozens of people have had the same question in the last month.
Now, because it's not "normal" for the lidar to not be in the center, it's not an easy task for the modification. But I can say that we have a working version, so let me update the robot skill with that feature. We expected to update it next week, but I think it's good enough to update today.
Thank you again DJ I thought I had wasted almost a year of my life on this effort. I am so happy you are working on a solution for this use case. I am looking forward to checking it out.