















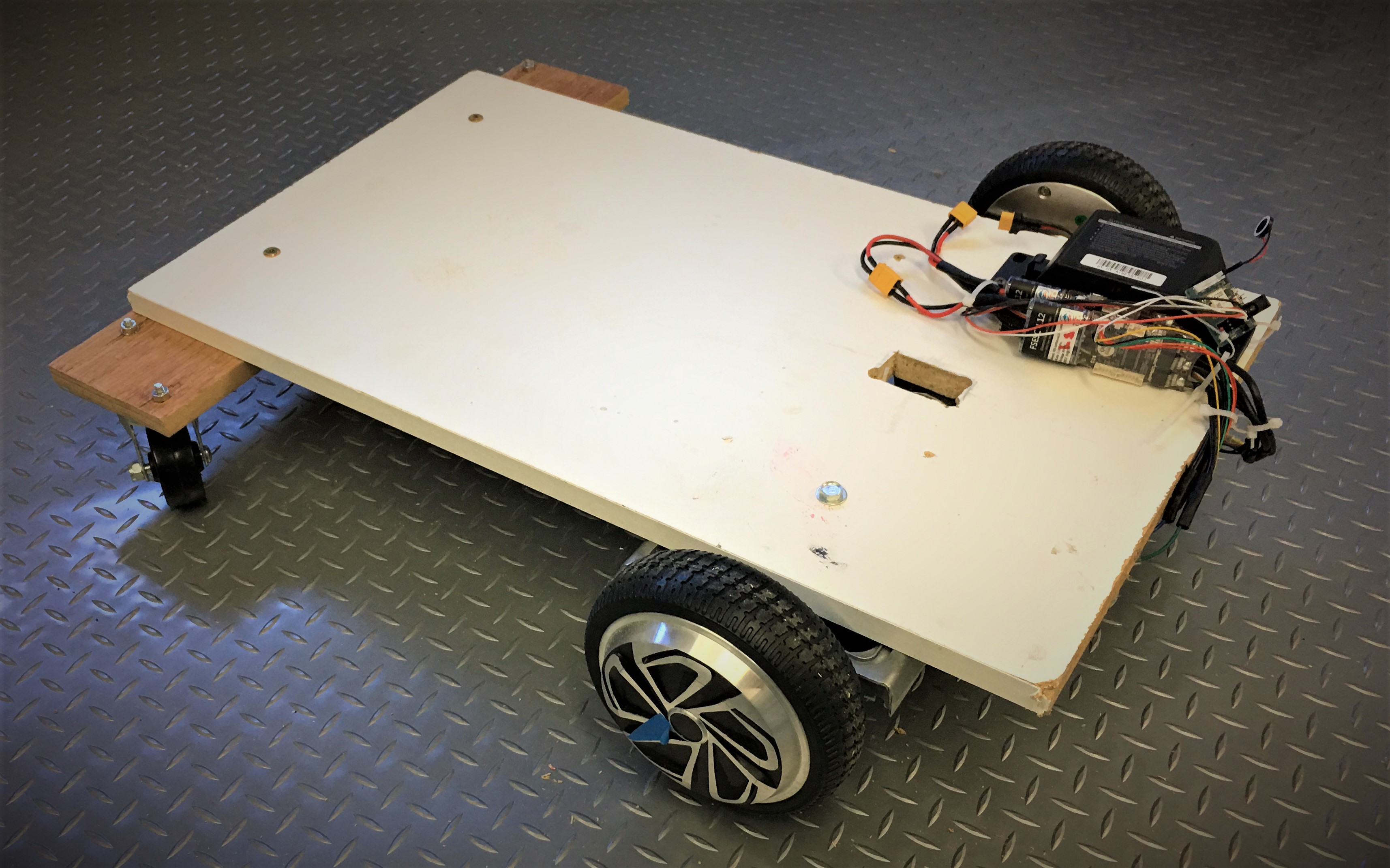
As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
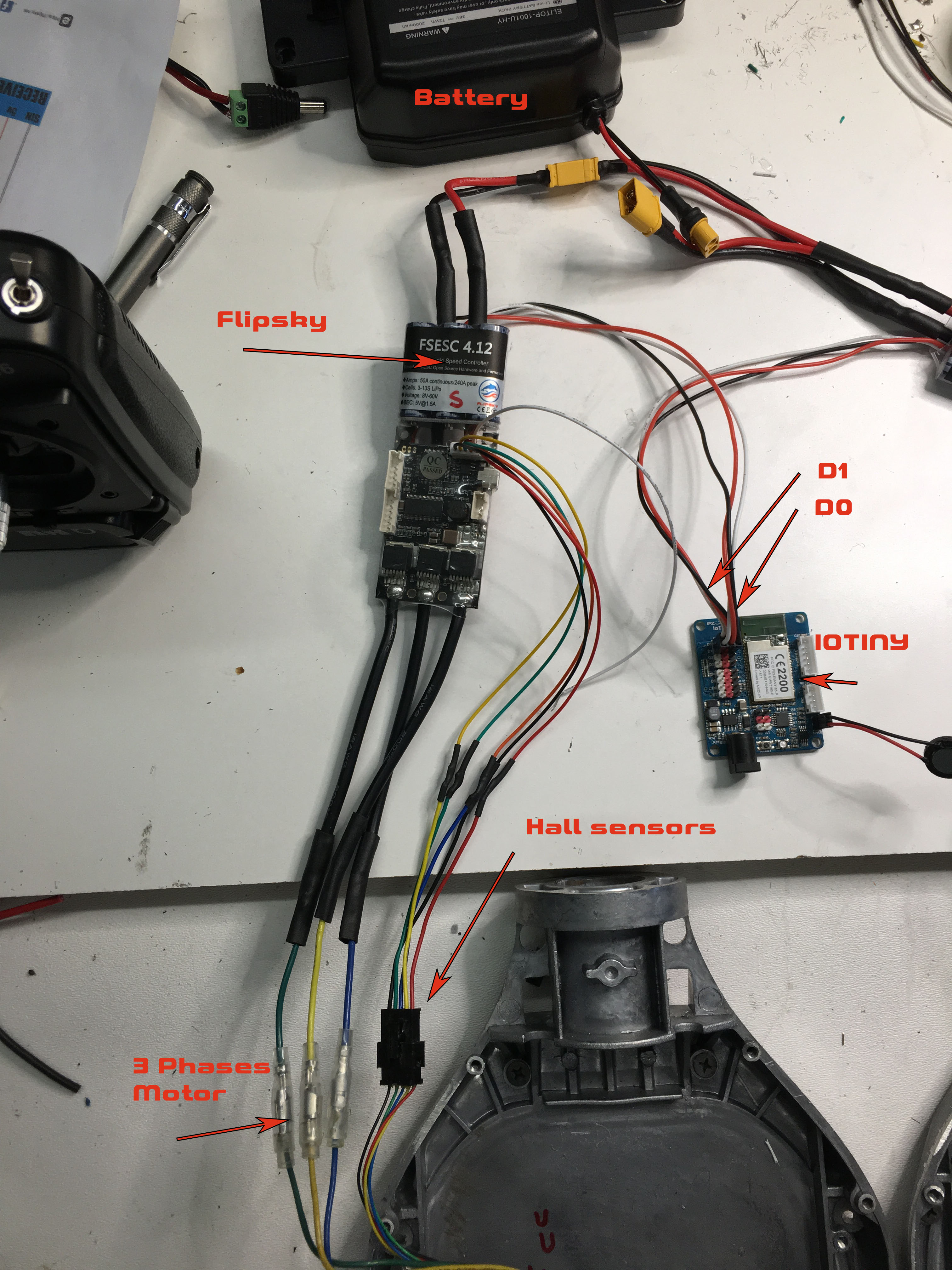
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
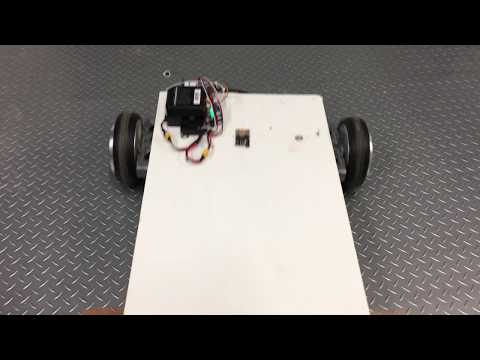
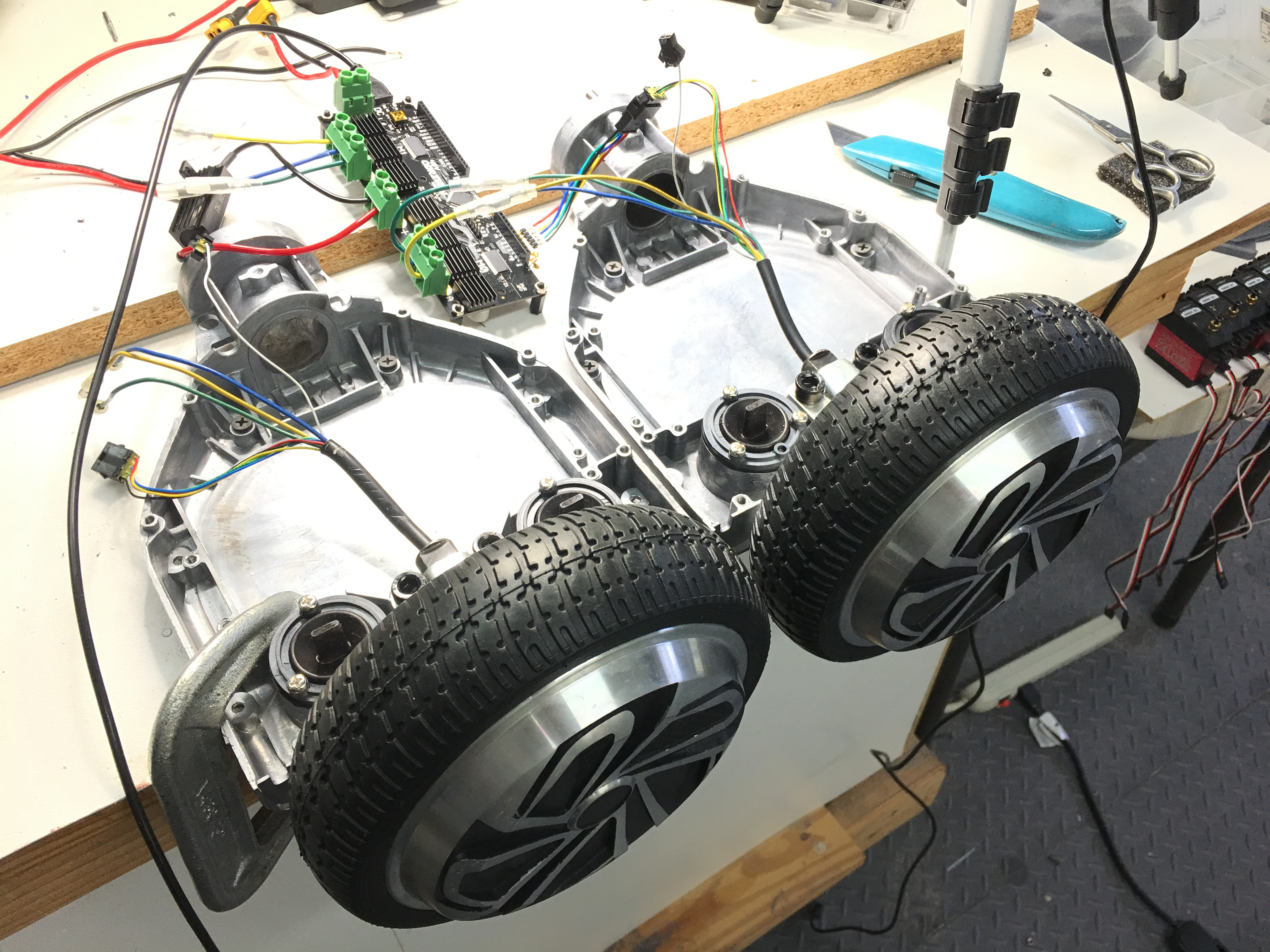
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots

Ezang's I Am A. B. - J D's Bigger Brother
Animator28's AVA (Advanced Visual Android) Update


Will, didn't I see a scope on your bench once ? I would be interested in knowing the waveform of the output ports to the Vesc. Maybe by slaving D0 to D2 and D1 to D3, then look at the waveforms of D2 and D3 to see if they are correct for the output to the Vesc. Does the movement of the joystick in the phone or laptop give the proper digital output signal in a consistent manner and time frame.
I need to finish up some work then I will get an I O Tiny and look at the output pwm signal.
Jeremie. If you read this can you offer some info?
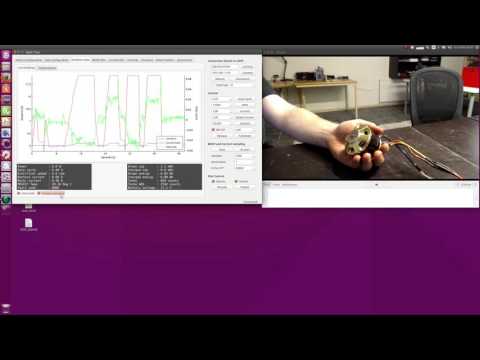
Here is a video showing real time update in VESC with ARC joystick. You can see the immediate update in VESC but the motor doesn't respond right away and sometimes seems to stop all together. The green LEDs on the Flipskys show signal from ARC but response sluggish, like upto a second or more after ive moved the joystick. And then there is the mixed mode issue.
But when you use a receiver there is no lag.? Or hang?
I was wondering, if you slave the output and put a servo on the slaved output to confirm the Io tiny works normal. It I weird that the signal hangs. Does it do it if you load an Adventure Bot basic program and use the pad to run it? Just wondering if the joystick function is hanging?
Correct no lag with receiver. Good idea on the slave servo idea...i will test today.
This video is pretty self explanatory. First part is the RC Controller working in the band no problem. The second part is showing how much effort you have to apply to get the frequency to activate the motors...it works fine with an attached slave servo....i did find there is like a sweet spot at 1 oclock and 7 oclock forward and backwards on the joystick to get the wheels to move. And interestingly once you get it working it works within all the ranges until you let off the joy stick then you must find those spots to get it to work again. Again servo works in any position. You can also see toward the end that the wheel moves after i let off the joystick for about 1/2 sec.
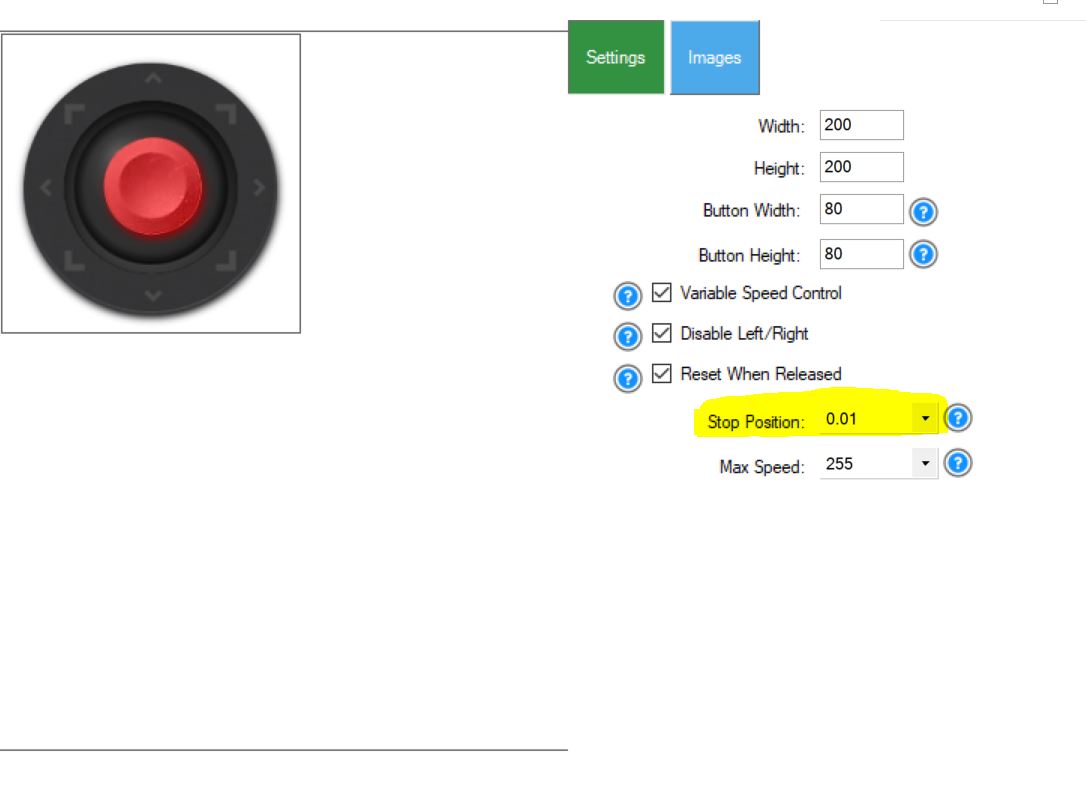
Update. Changed the stop value in the control for the joystick from .10 to .01 and it helped some with getting the wheels to move. Still not acting like the RC controller tho. Also mapped the keyboard arrow keys and they are snappy and fast to respond like the RC controls.
Also I increased the speed to 10% for testing and it takes nearly a full 2 seconds for wheels to get signal to stop after i release the joystick on the mobile app. So the Flipskys are not in love with IOTiny.
I was wondering if the issue is the use of the joystick. I wonder if just a straight Movement Panel reacts the same?. I also wonder if the Adventure Bot basic would react differently? Instead of the two planes of axis from the joystick (x, plus or minus and y, plus or minus) you only have a single plane (the x axis, plus or minus). What do you think?