
















As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
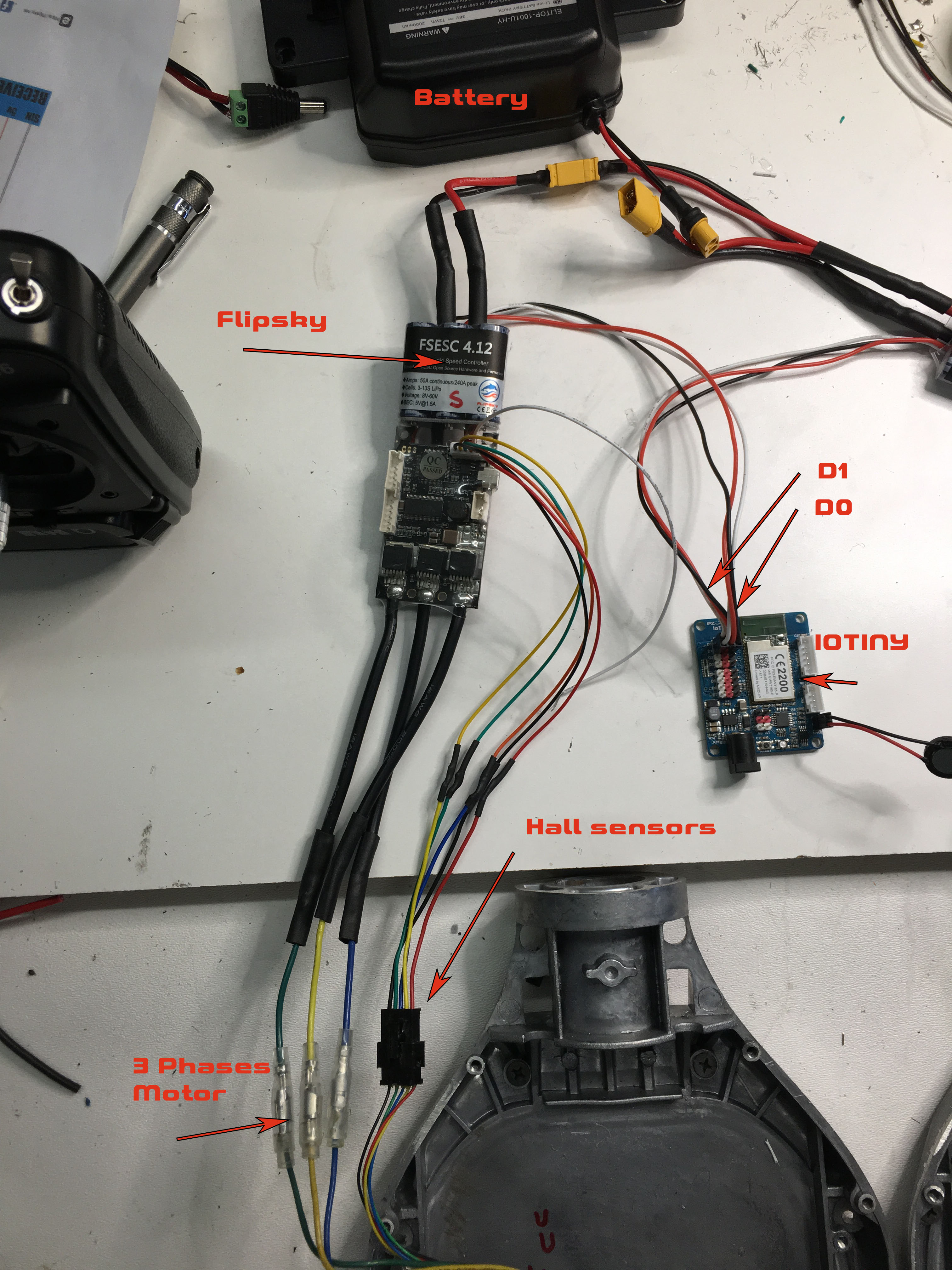
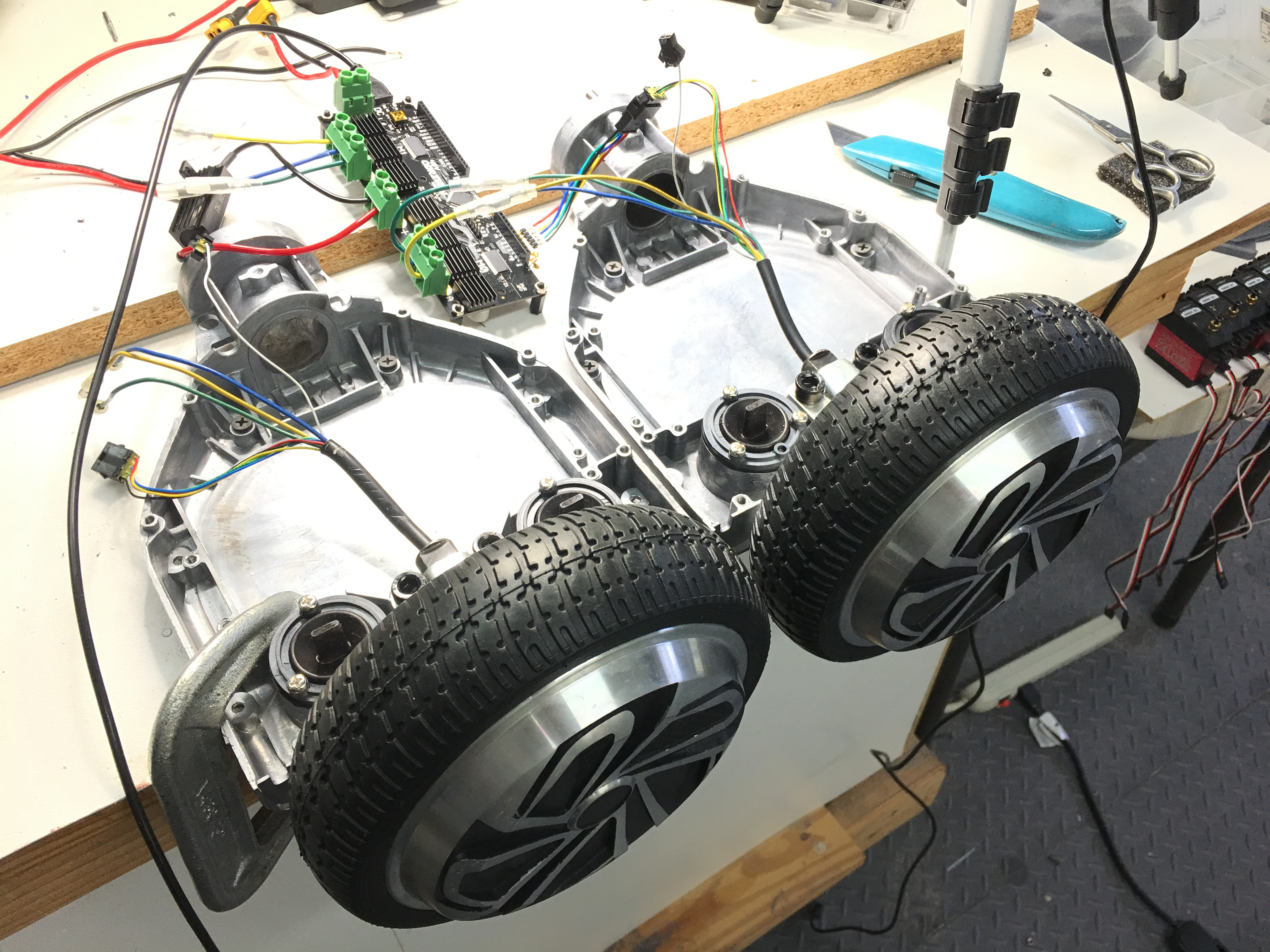
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
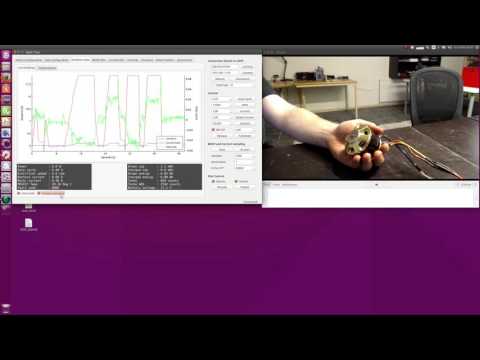
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots
Deleted's Erne - Emotive Robot

Ptp's Star Wars Bb-8 Robot Suitcase


Good progress! I'm going to reprogram mine today for the slow robot movement. I'll shoot a video of that.
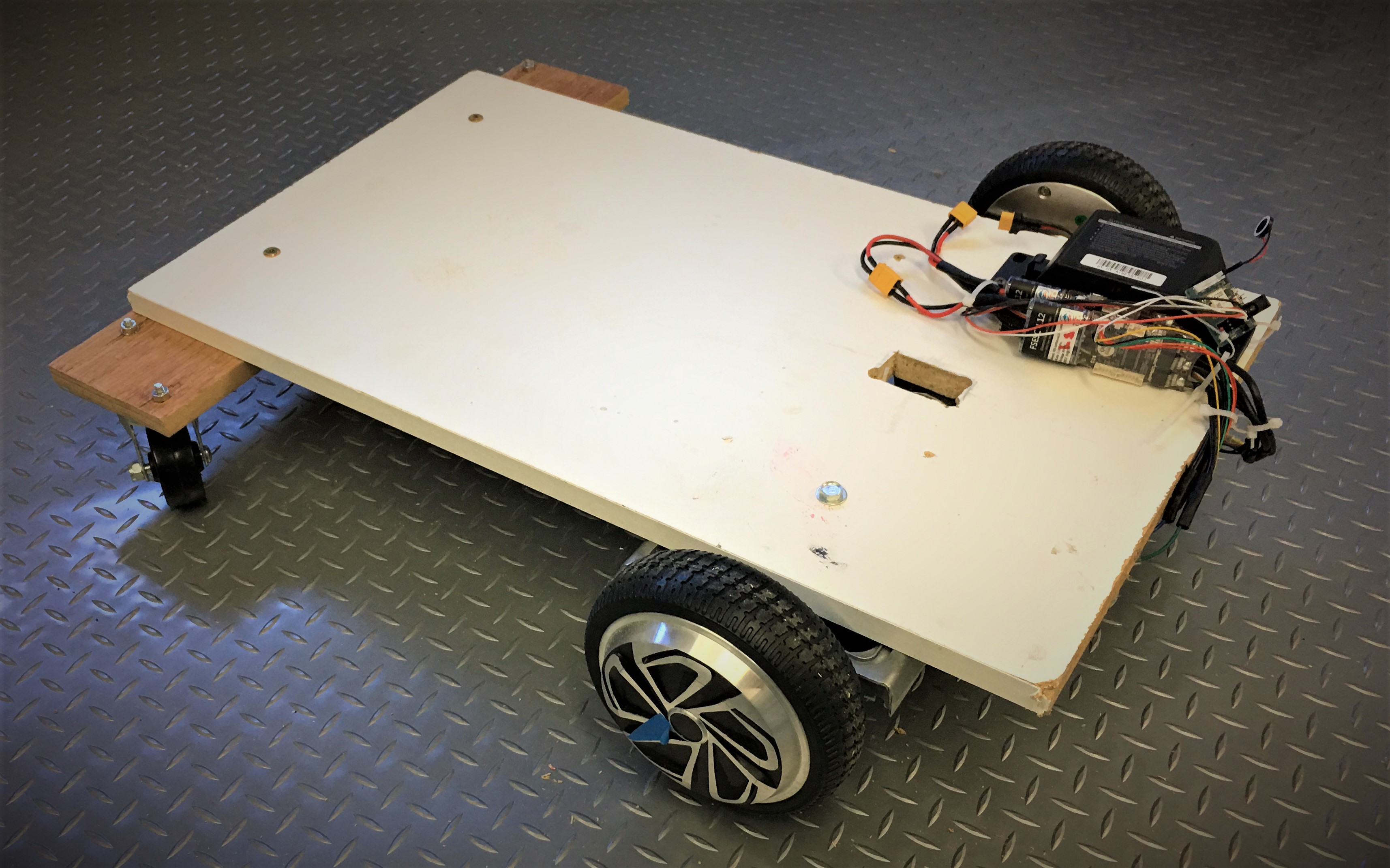
I kept the zinc frame for the wheels as well..until i build a proper frame for it and have some aluminum wheel mounts built.
My Flipsky's came in about 2 weeks. I opted for the DHL shipping, but it comes to the US as China postal service first, then arrived in LA and picked up by DHL seems like some kinda way to save them money.
One thing I will say. Its the first time I have had such great support from a company in China. My shipping was not updating, so I contacted them via their facebook page with my order number and they shot back a facebook message right away with china postal tracking to see where my package was.
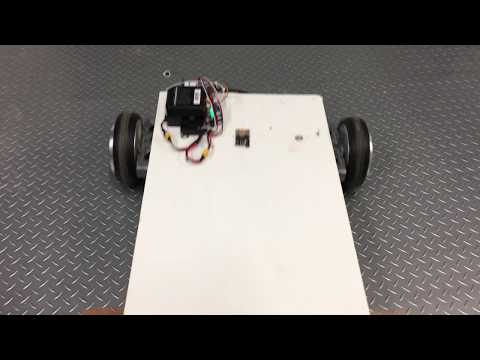
I managed to test the Flipskys via VESC at a reduced speed. I've set the max speed to 5%. It is absolutely silent when running. Motors do not jerk around and have a smooth start up. As I stated before as you increase the load you would have to adjust this percentage to make up for the mass of your robot. Mine weighs in at about 45 pounds (wood /wheels/ battery). Later in the video I added some additional weight (about 15 pounds wood), with no apparent affect).
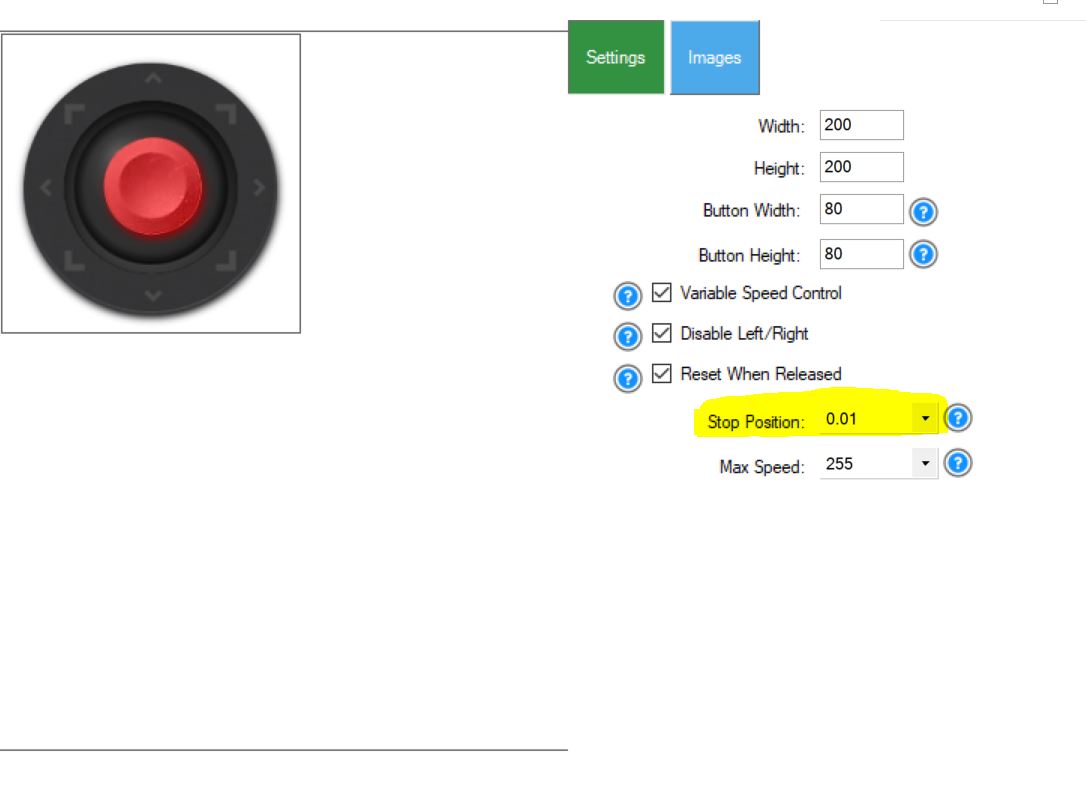
I'm still having troubles with getting the mobile controls to work with VESC correctly. When I turn for example, one wheel should turn opposite the other wheel. I can do that sometimes...other times no. So in the video you see that at the beginning it was doing the opposite direction, but was unable to reproduce it when on the ground.
I would use an RC controller to test with, but none of mine have a mixed mode (differential mode/tank mode), so each stick would just control a side (L or R) so controlling direction would be a challenge.
Another configuration for a robot with these motors would be both motors moving together (forward/backwards) with a another wheel controlling turning.
How is it with a laptop and running ARC,? Same issues ?
I don't understand why it won't work right. Unless it is because of the mobile app, which doesn't make sense either.
Dumb question, do the boards need to be grounded together for some reason ?
Tried laptop in this video. Same issues. Boards are connected via the battery and IOTiny via ground, so all sharing grounds.
It works great with an RC controller very snappy and stops as soon as i let off the controls. The ARC has about a second or more before the controls respond. My thoughts are on the frequency. I have to set up the controller in VESC and it uses the input from the EZB as its control frequency. It will detect neutral, full forward and full back. During the set up you look at the numbers and input those values. The EZB is very finicky on giving out its position with this software. It seems difficult to obtain the correct values. Maybe because my finger is on a track pad and not getting into those correct positions?
Like i said most people are not going to use their robot like this ..(driving around with RC control), but instead use PID or some other way to tell the robot where to go or things to avoid as in the case of the lidar, etc.
But...if i knew the exact frequency for the IOTiny and EZB I might be able to just input those and get a better response. (I.E max, neu, min full spectrum)
If I have time I will shoot a video of both the screen of ARC and a PIP of the wheels with IOTiny and another one with the RC controller so you can see the difference. I might also try the EZB 4/2 instead of IOTiny but don't think the frequencies would be different?!
I did look closely at my video and I get correct forward/reverse on the turn at :23 secs in video. But again its not consistent....in other parts of video one wheel just stops and the other rotates and turns it.
Gotcha. This becomes a conversation of using a Raspberry Pi, arduino, IO Tiny, etc. Vs the Vesc. I will think about this. Also PID loops can require a lot of playing with too. I hope I get my toys soon.