
















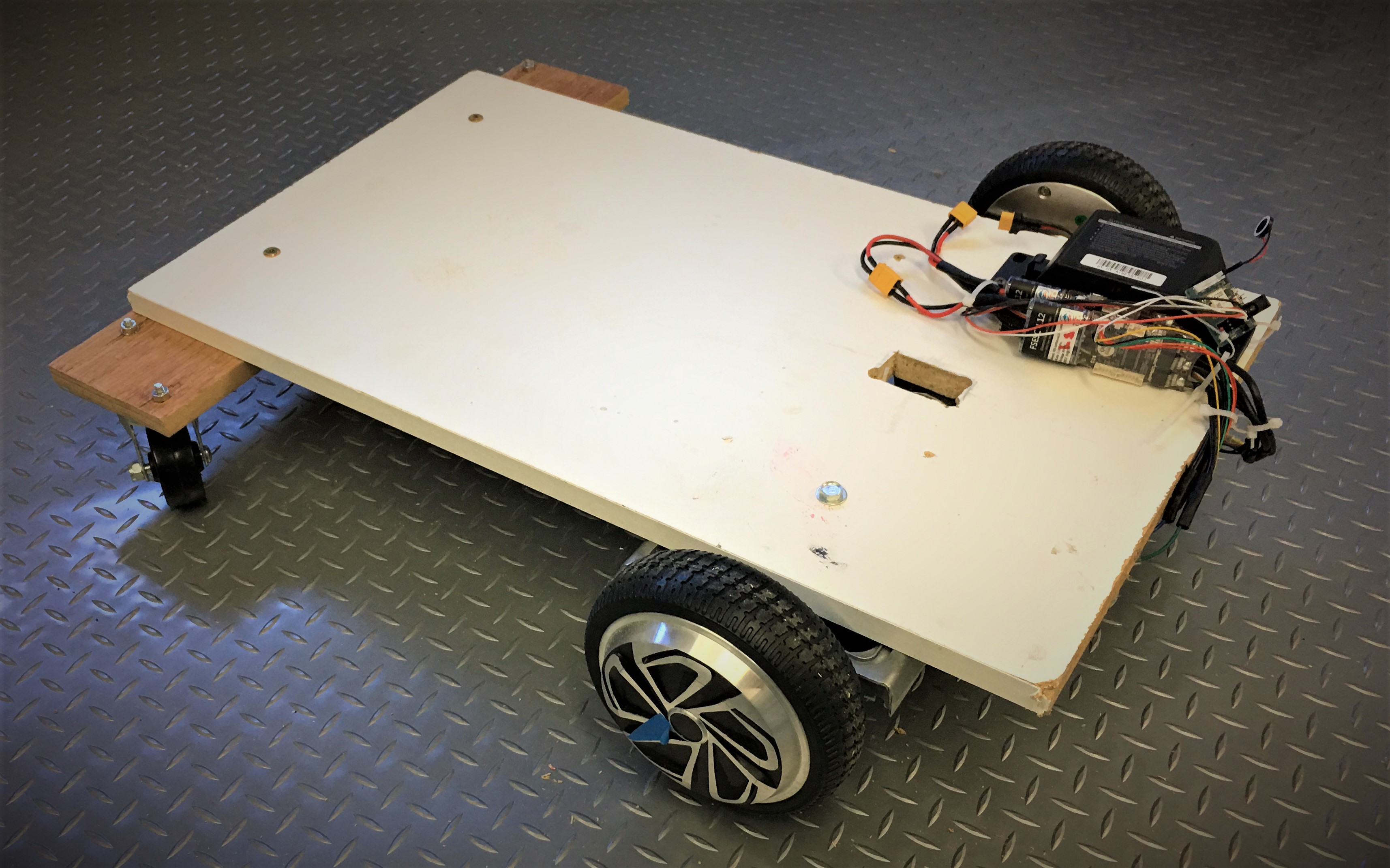
As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
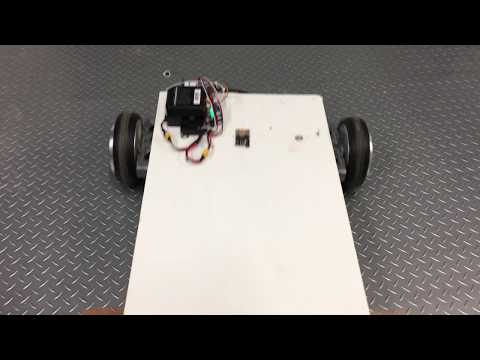
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
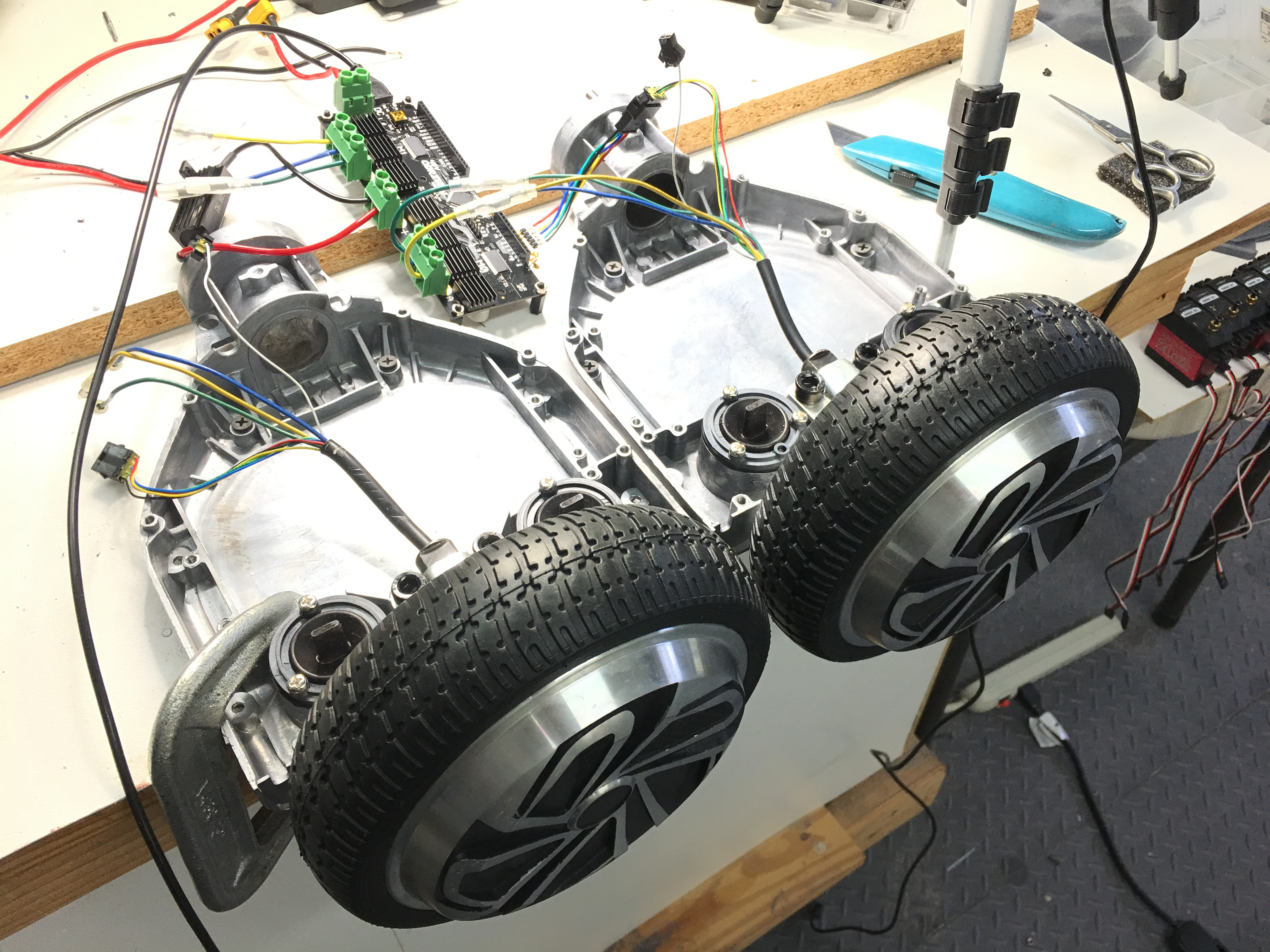
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
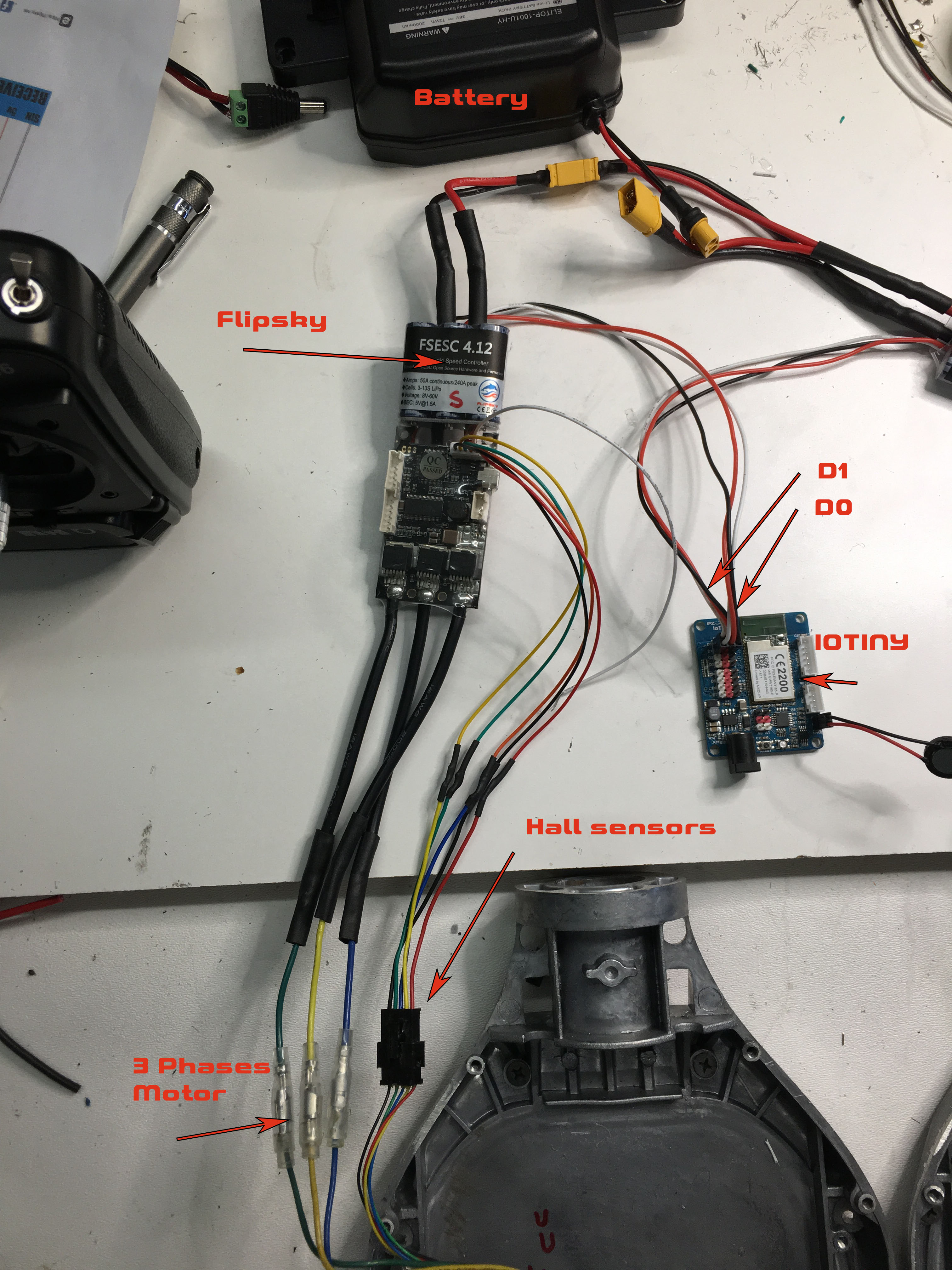
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
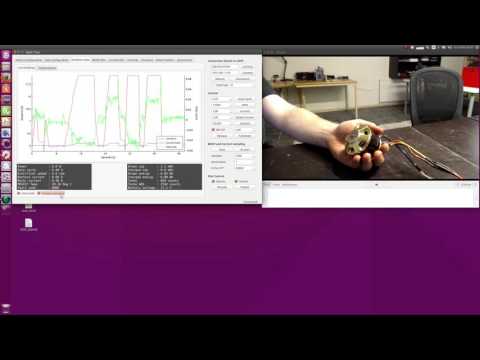
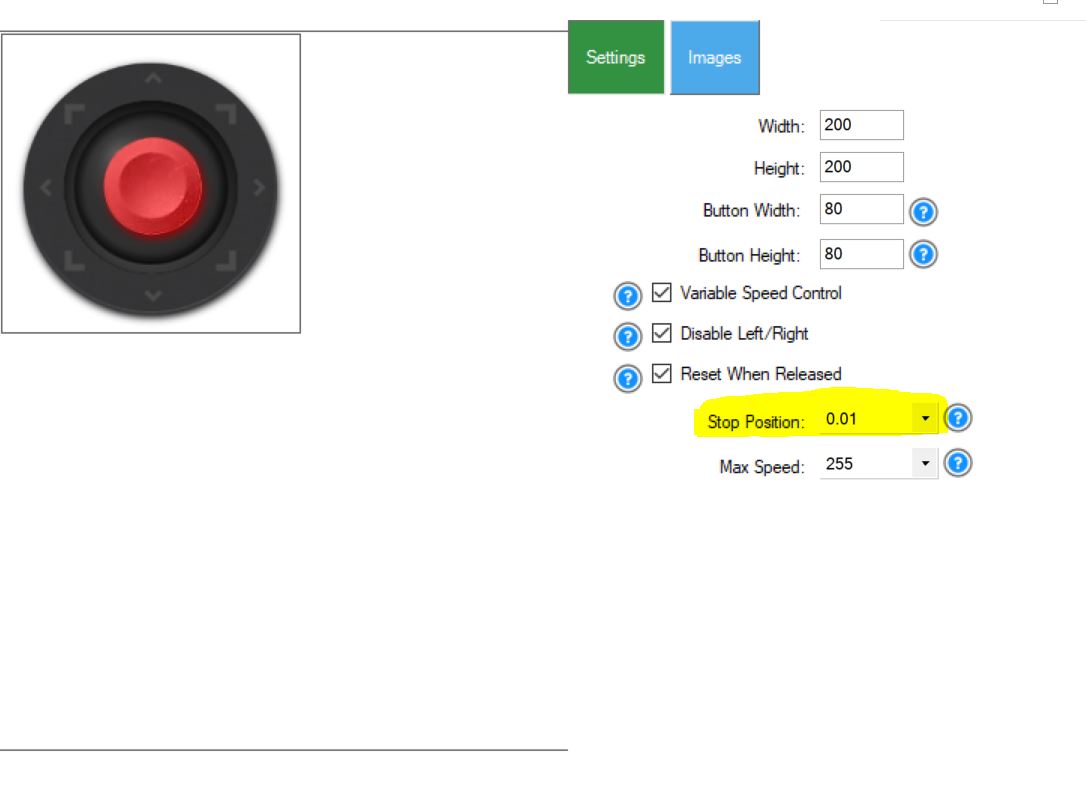
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots

Steve's Robot Captain Ann Droid

Boon's Boon's Robot


Making a hoverboard is a very difficult task. You have done a great project.
Fxrtst is the ACE of robotics. He continues to amaze.
@fxrtst also deserves a lot of thanks, for always sharing his projects and adventures with all of us.
@fxrtst,
do you know If the hover board will work with a sabertooth 2x25To control each wheel/motor?I know the max voltage is 33.6 V for the saber tooth, there’s other motors out there that would work but they only hold 60 pounds and I would like to have a lot higher Weight limit for the robot.Also I believe the hover board has an encoder built-in which would help with controlling the movements of the robot in the distance Interns traveled.
Thanks in advance,merne
I don’t know much about the saber tooth. But I can tell you that hoverboard motors are run on 3 phase. So you need 3 phase controllers. The controllers I have in videos on YouTube use a 3phase controller that are used in skateboards.
there are many advantages to using the software to program them like continual consistent speed up and down hills, and to increase speed to get the mass to move at consistent speeds and even break regeneration for the battery.
You can make thumbnails for video files with Video Thumbnails Maker Crack. Everything costs a total of ten dollars. You should have it. Video Thumbnails Maker
Looks like we might have some spam here, as video thumbnail maker doesn't really relate to hacking hoverboards
Thanks for sharing this detailed update on your hoverboard motor project! It's fascinating to see the innovative use of these affordable motors and your exploration of different motor controllers. The ODrive and its open-source nature sound promising, although it's unfortunate that you encountered some challenges with saving configurations. Your perseverance is commendable.
Considering the issues with the ODrive, the FSESC 4.12 50A seems like a solid alternative. The fact that it's programmable and comes with user-friendly software is a big plus. I'm curious to know how your tests with the ezb to control them go and how the overall project progresses. Are you leaning towards using the FSESC 4.12 50A for your hoverboard motor setup? Looking forward to the final video!