
















As promised I've started a separate thread on this. I had mentioned over at my Alan thread that I was thinking about using hoverboard motors for a rolling base for the full bodies of Alan and Alena. These motors are super cheap at about $25 a piece on ebay. They are 3 phase just like the 3 phase hobby motors for cars and planes. So there should be driver support for them.....well yes and kinda no.
I have been watching a motor controller called the ODrive. Its all open source (hardware and software) and its a dual motor driver. I posted a video of these motors on a grocery cart driving around using hoverboard motors. So I bought an Odrive. I ended up buying a whole hoverboard so I could use the charger, battery and some of the connectors. This one came from Frys and cost $100. Its good upto 265 pounds.
Well now the bad. The ODrive is still a work in progress and not too intuitive. But they have a good write up on how to set them up with the hall effects encoders. All went well until I tried to save out to the board. Over and over again i could not get it to work right. I posted on the forums and got no reply back as to what the issue could be. So after days I began looking for another solution.
I found a great source in china that is making opensource stuff for skate boards. The got 2 single motor drivers. Each one has a standard servo connector and i can use two of them for mixed mode (tank mode). Each board costs $85. So its a bit more than the ODrive ($150 with shipping for the 48 volt ver.)
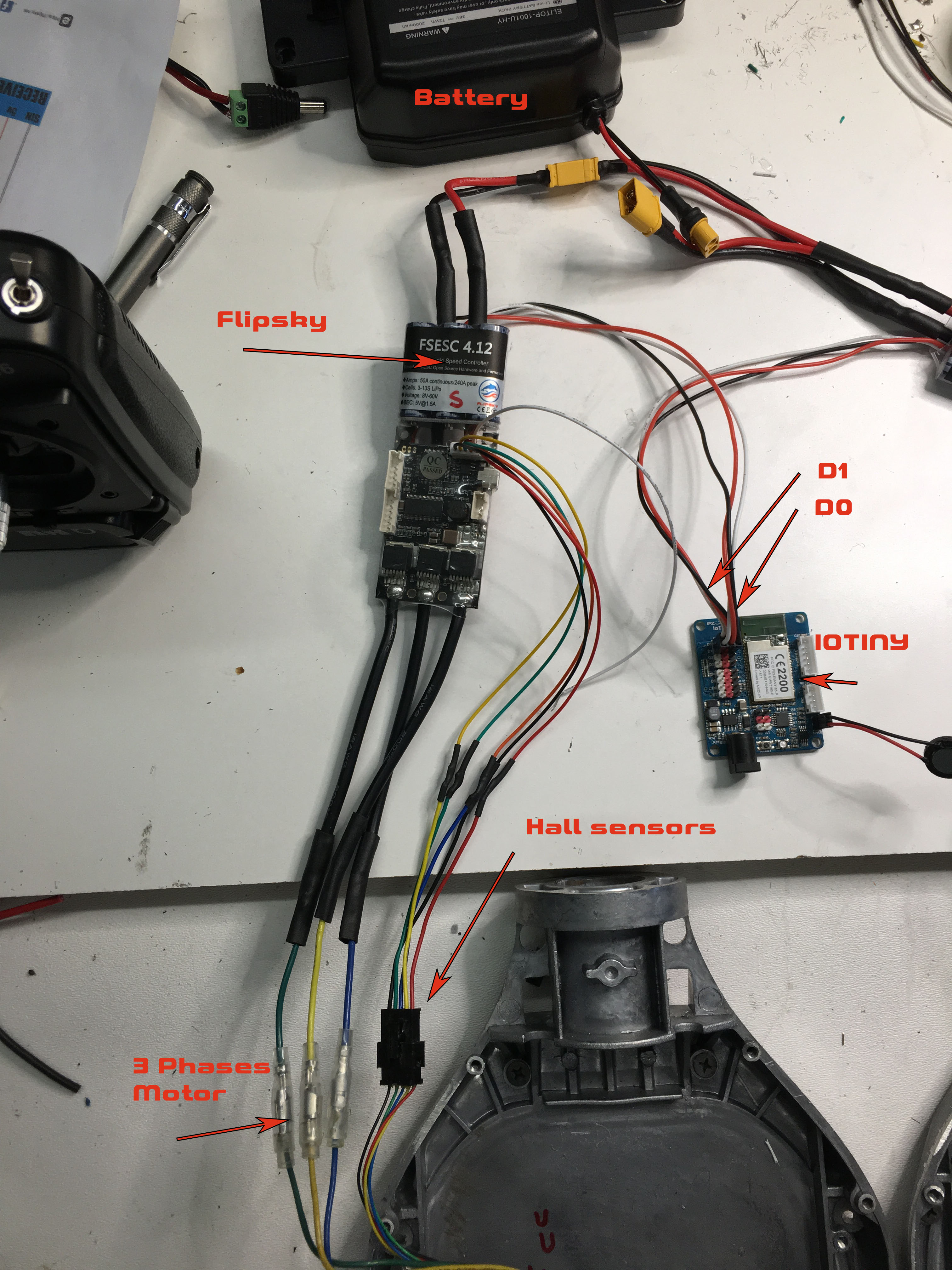
The name of the board is the FSESC 4.12 50A Based on VESC 4.12 from Flipsky ESC. And can be found here: Flipsky ESC
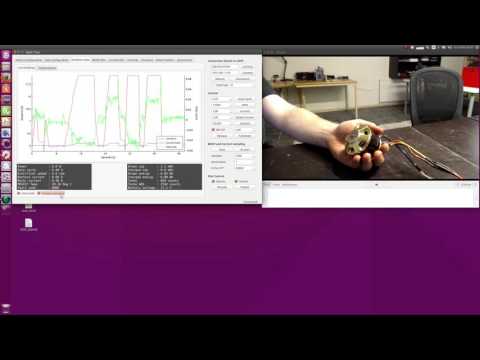
This controller can be completely programmed with their really great software..automatically figures out all the poles for the phases. Set up the frequency for the pwm and even have shut offs for voltage mins etc. They have a good youtube channel with vids on how to set up everything.
I have the video of the break down of the hoverboard done. As soon as I get these control boards I will be doing tests with the ezb to control them. Then I'll put together a final video and post here.
Discover more robots

Jim's Armadeus Mk. 12
Justinratliff's Finley Themed Robot


Tomorrow I will edit the video on:
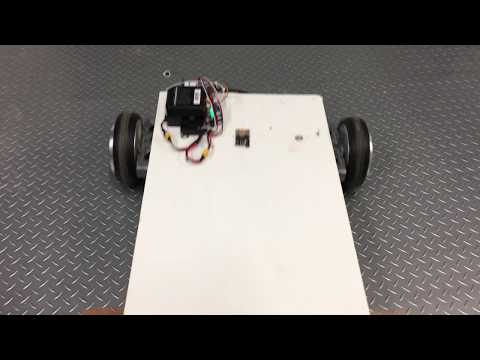
Good morning All. Liam is braver than I thought. Looks like you kept your word about strapping on your son and driving him around, even if not at full speed ! Well done Liam ! It sounds like I missed all the fun. I guess you fixed the control issue. I be starting my base tomorrow. Back to work later today. I look forward to your videos. OOPS ... I just realized I didn't look back far enoughin the posts for all the answers.
Love that last video with your son,awesome job !:D
Thanks guys...we have a booster seat we are going to add to the whole thing. Should be fun.
I'm finishing up the video for the above 9 items and will post later today. (its a longer video about 9 min)
I look forward to Liam's feat of bravery.... and the videos.
Video is finished. Its one video with 2 parts. Unfortunately, something was wrong on the recording of the wiring so I only have one camera angle that was blurry. But if anyone has questions on that set up beyond whats in the video, let me know, I'd be happy to answer those.
I didn't voice over which can be more explanatory, but after i watched the video several times i think all the info is there in lower thirds.
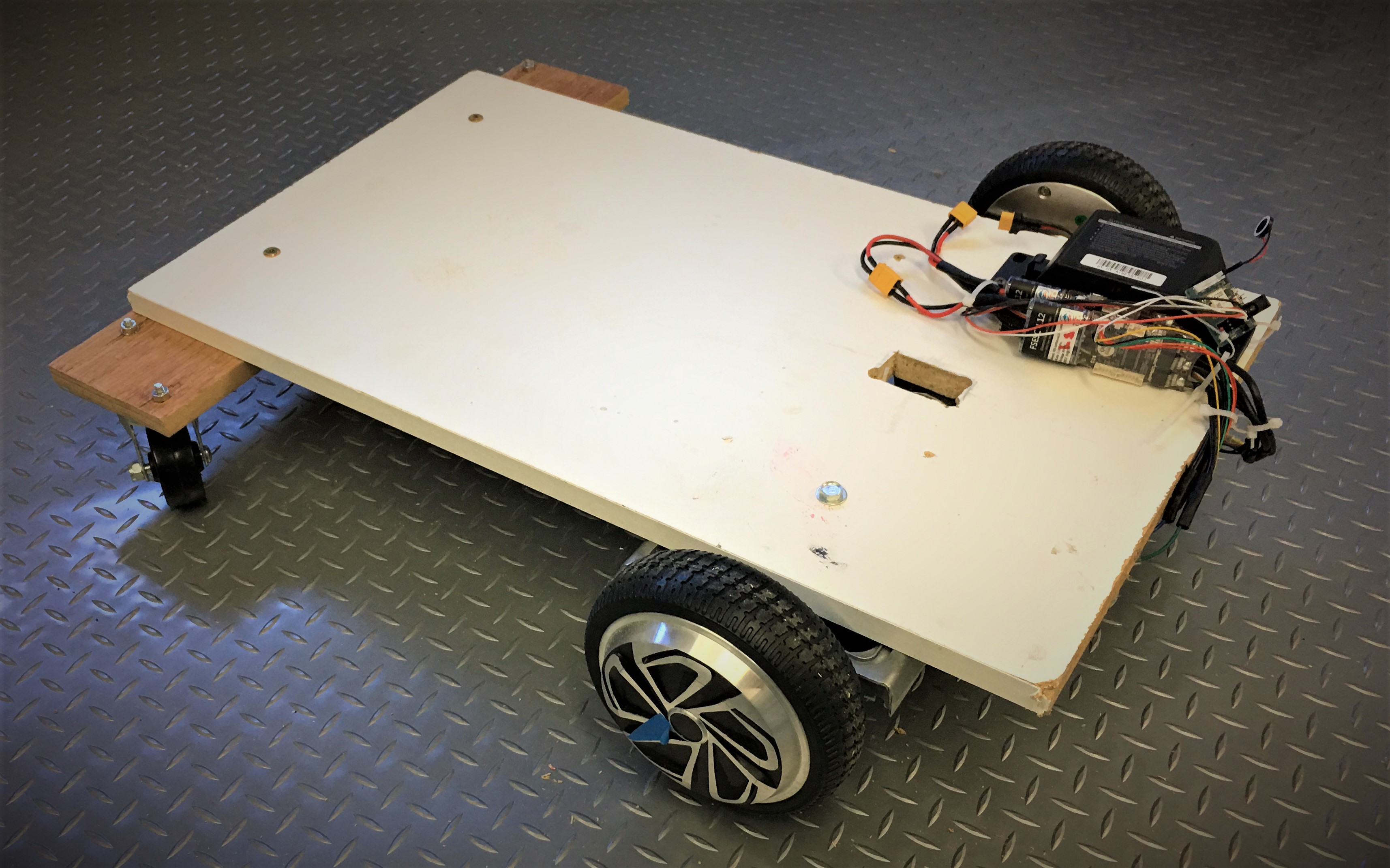
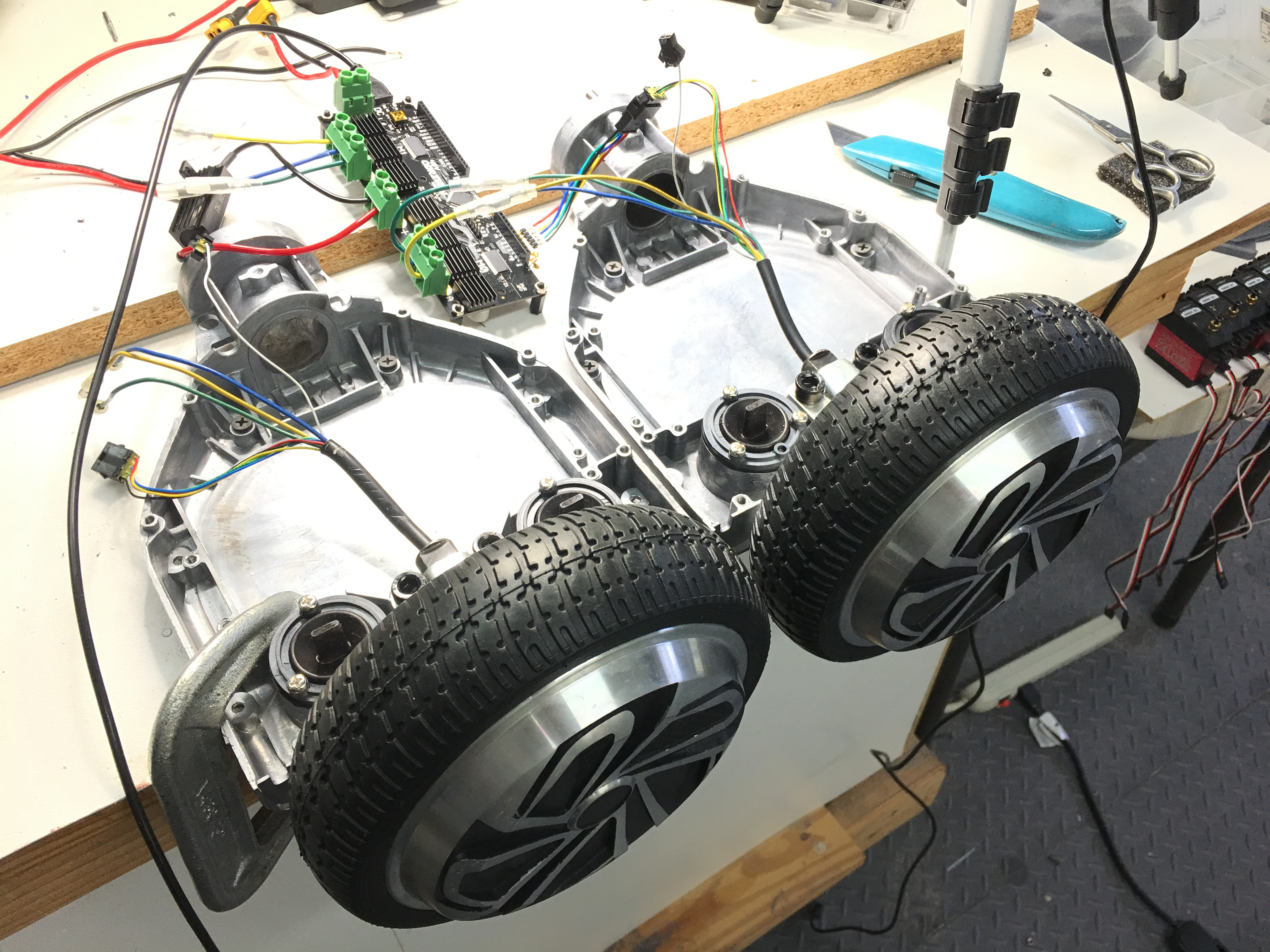
Thanks for the videos. Life needs have stalled my project a bit, but I plan to complete the test platform wiring and build the wood base with caster platform this weekend. While wiring I was thankful the original hoverboard control boards identified the hall sensor wire colors which allowed me to correctly connect them to the plug. I made an assumption the white one is the "tp" wire. My goal is to add a camera to the platform which will let me end up with a big Adventure Bot. I will load the bare adventure bot program and test using that.
Yeah the Hall sensors wiring was confusing. In the end I just matched up the same color wires but they were not the same order on the connectors. I also had white and it is indeed the temperature read wire. In the end when I ran the auto setup the Hall sensors were read in correctly. So I assumed I connected it ok. (only wire change was i had to match blue and orange together)