



























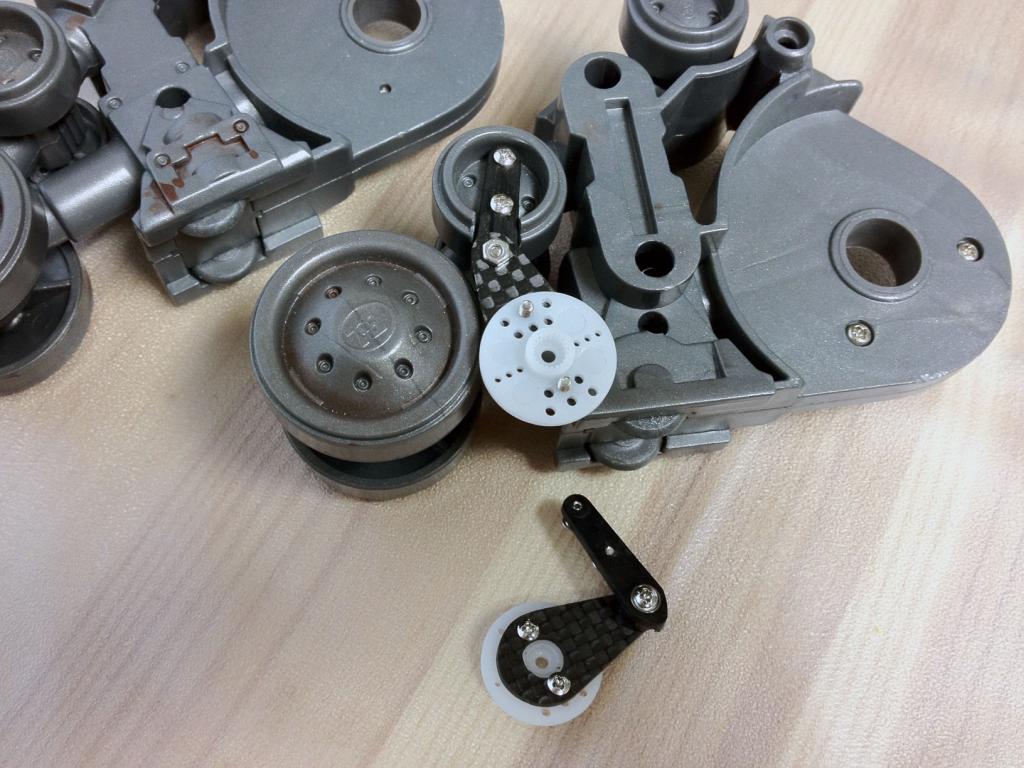




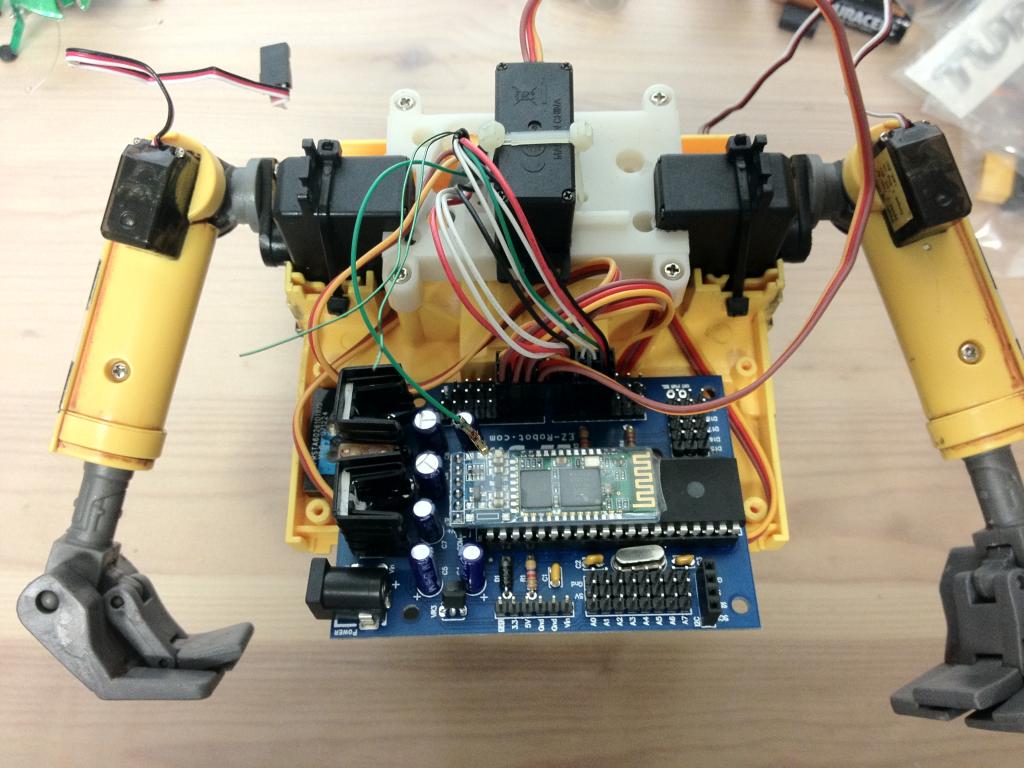
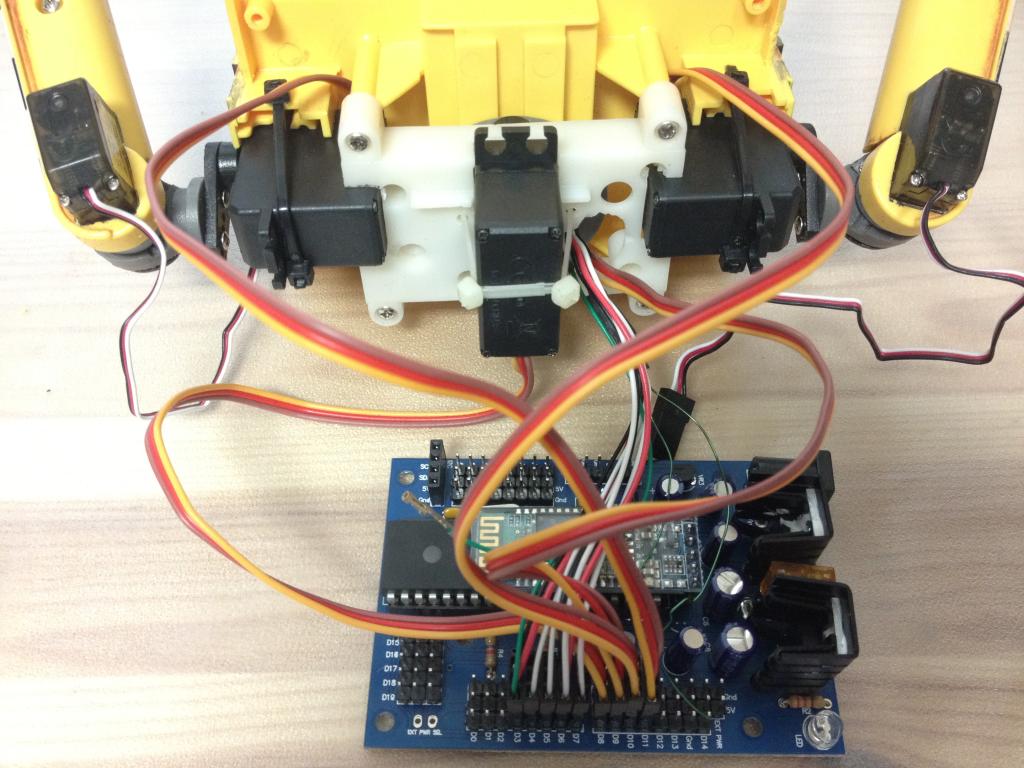
Inspired by DJ Sures and many other Wall-E projects on here, i decided it's time to make my own Wall-E and he will be my first robot build. I wanted him to be as lively as possible. I give credit to Joc's and Glickclik for the geared neck tilt and wheels tilt ideas, i just made it my own using the same concept. I still have yet to fully understand ARC so additional help would be greatly appreciated. Here is what im at so far in the project, some of the parts are hand made from raw Carbon Fiber with only a dremel and i use some parts from a 450 R/C heli as well as bearings in some of the joints.
Done so far:
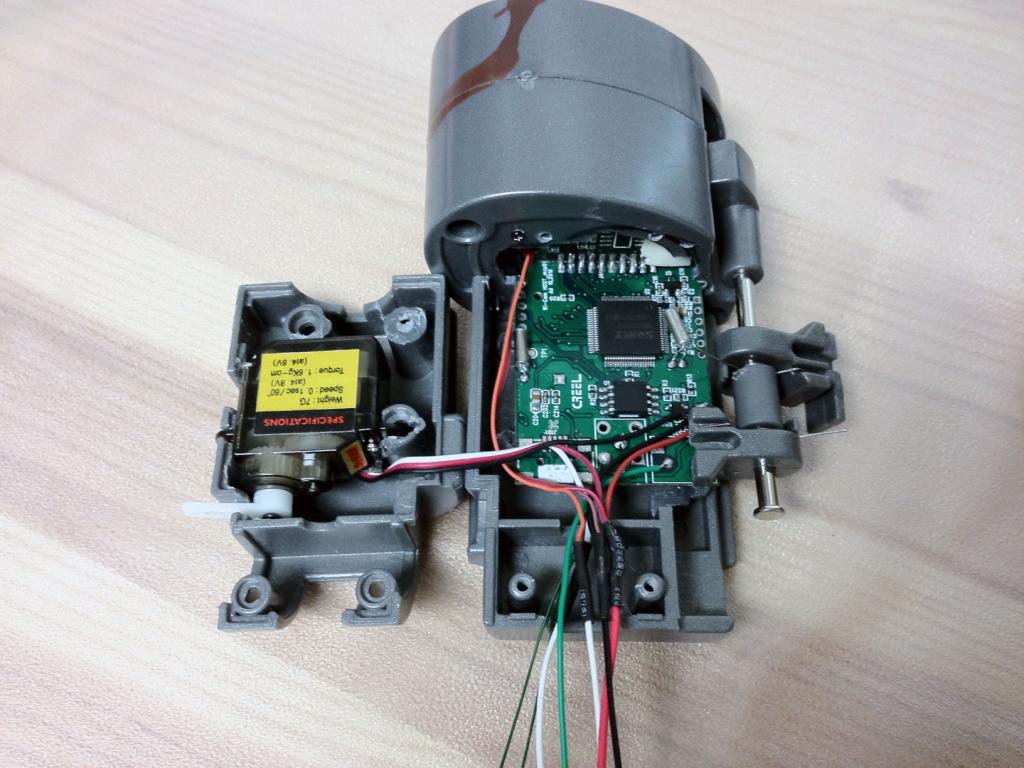
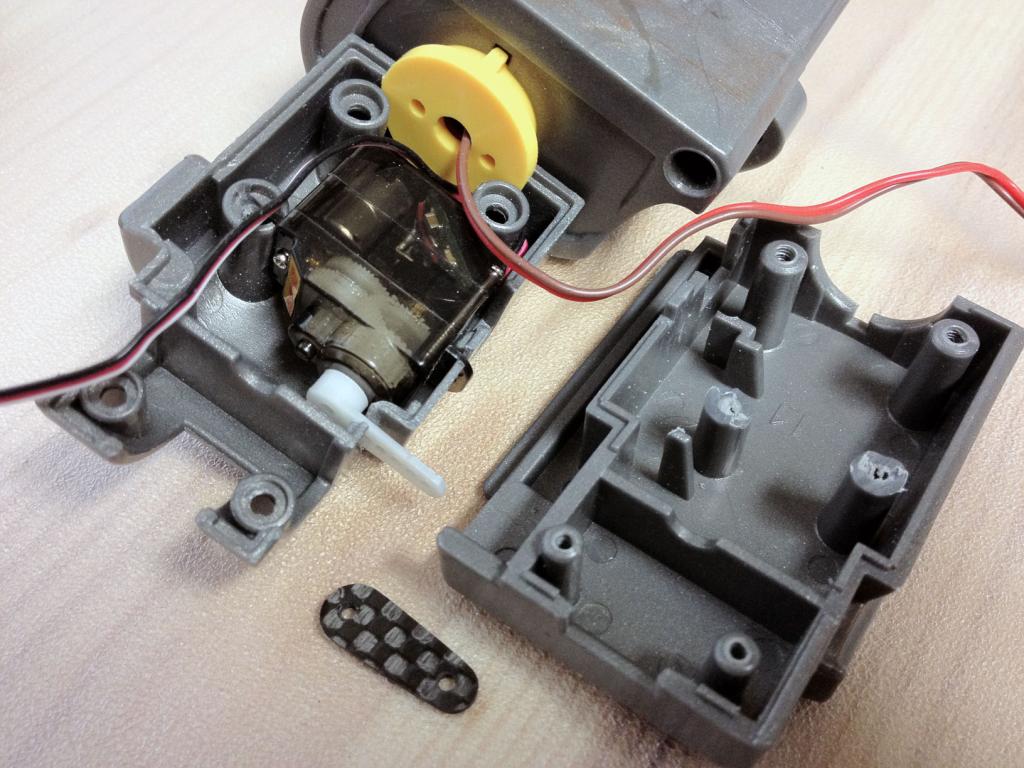
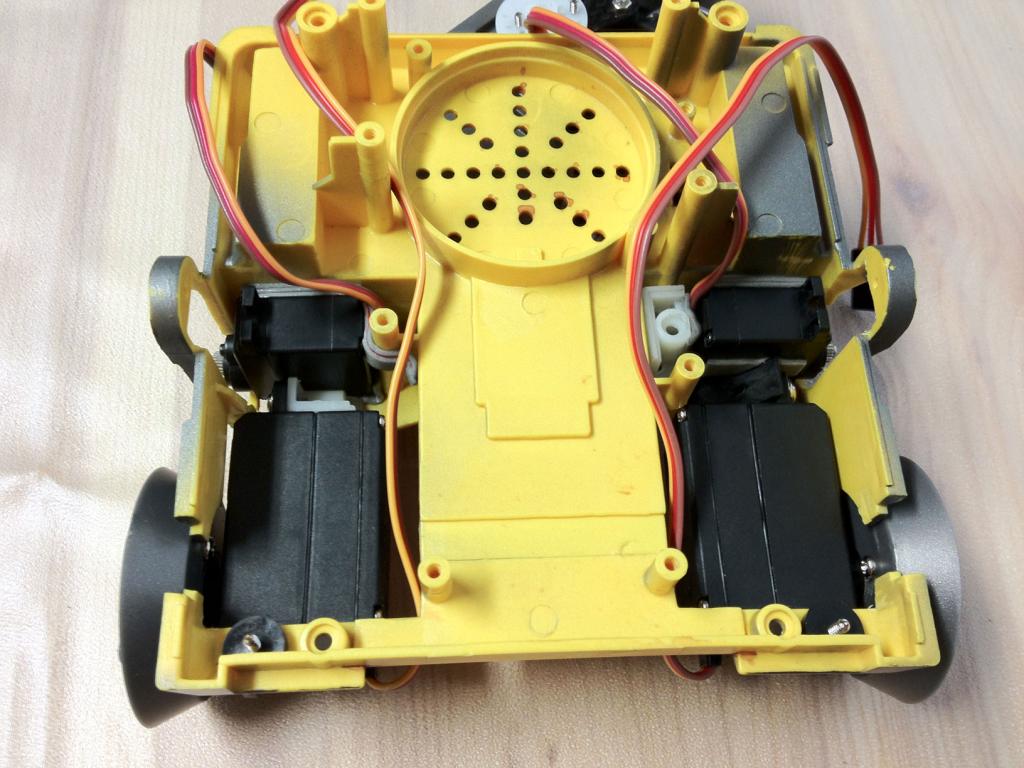
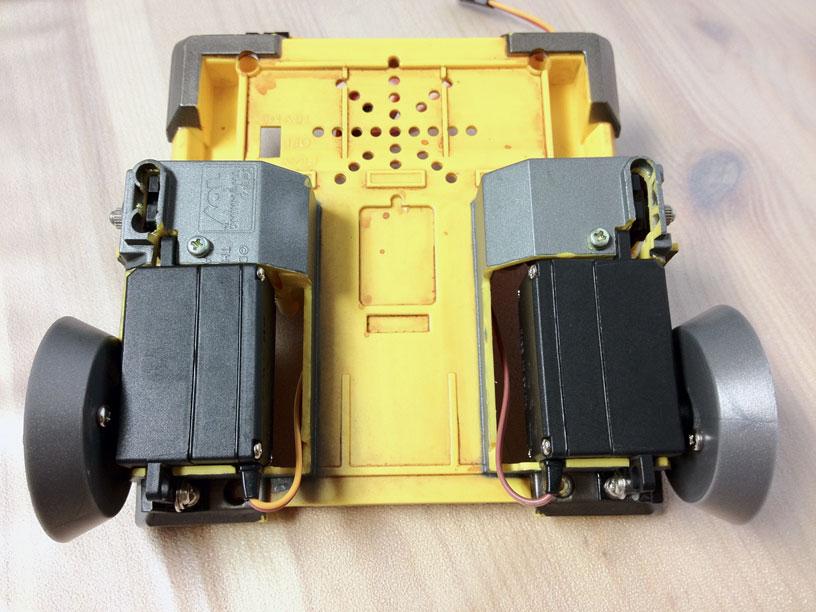
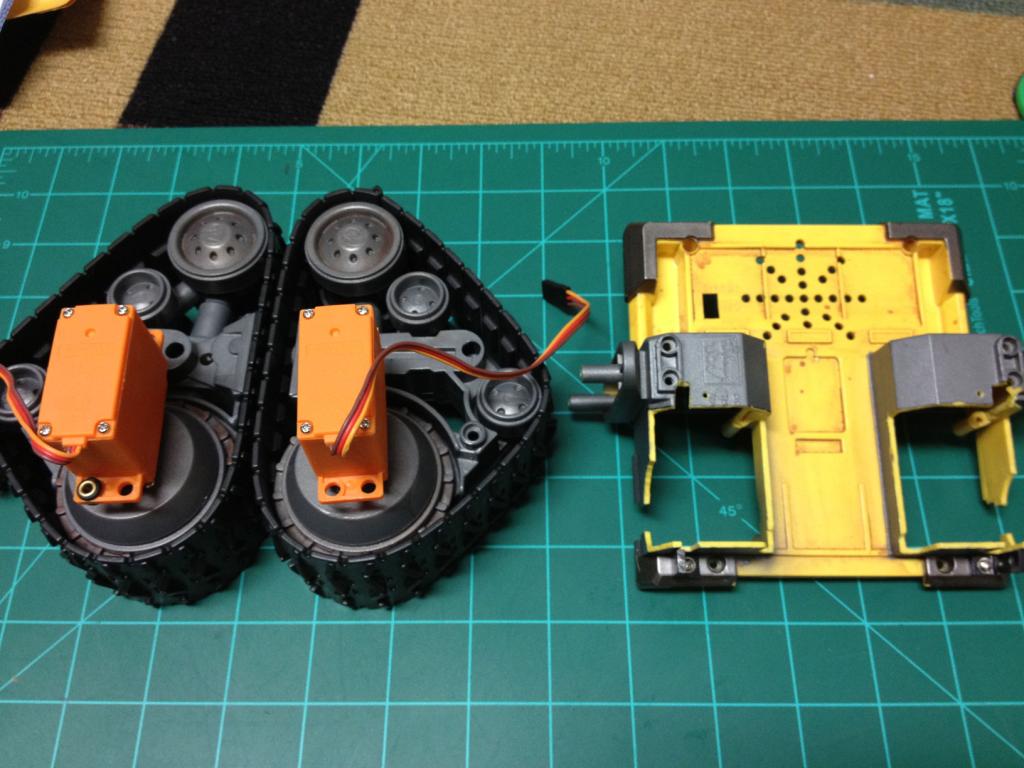
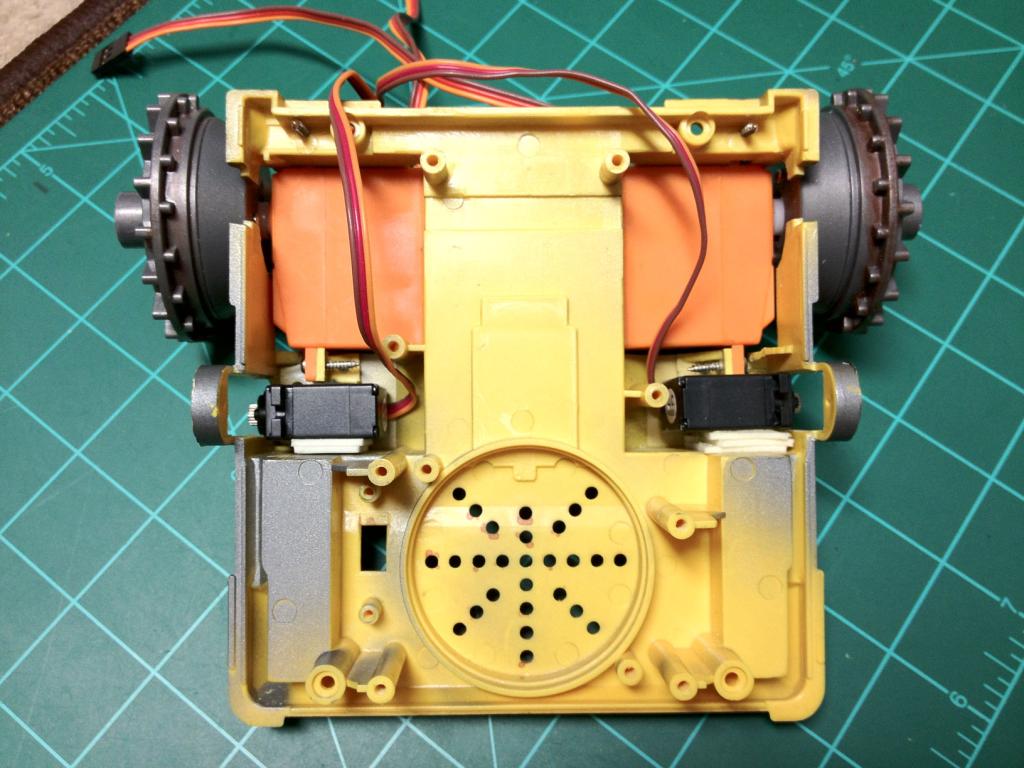
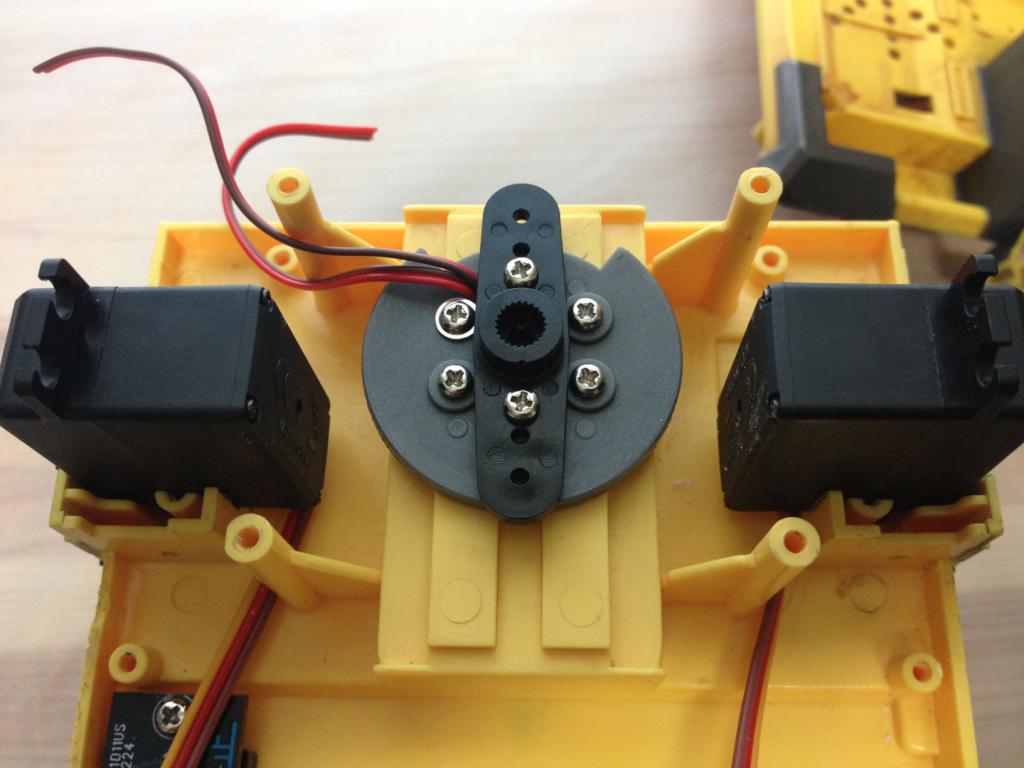
Metal gear high speed modified continuous servos for wheels.
Micro metal gear servos for wheels tilt.
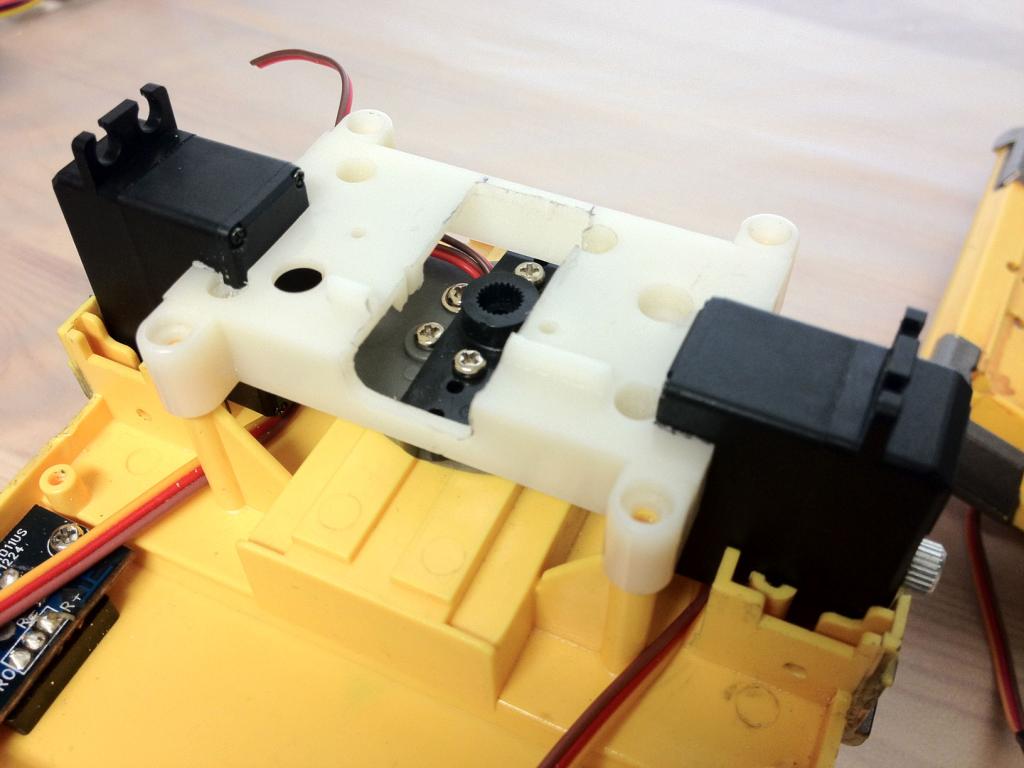
Mini metal gear servos for vertical arms movements.
Micro servos for horizontal arms movement.
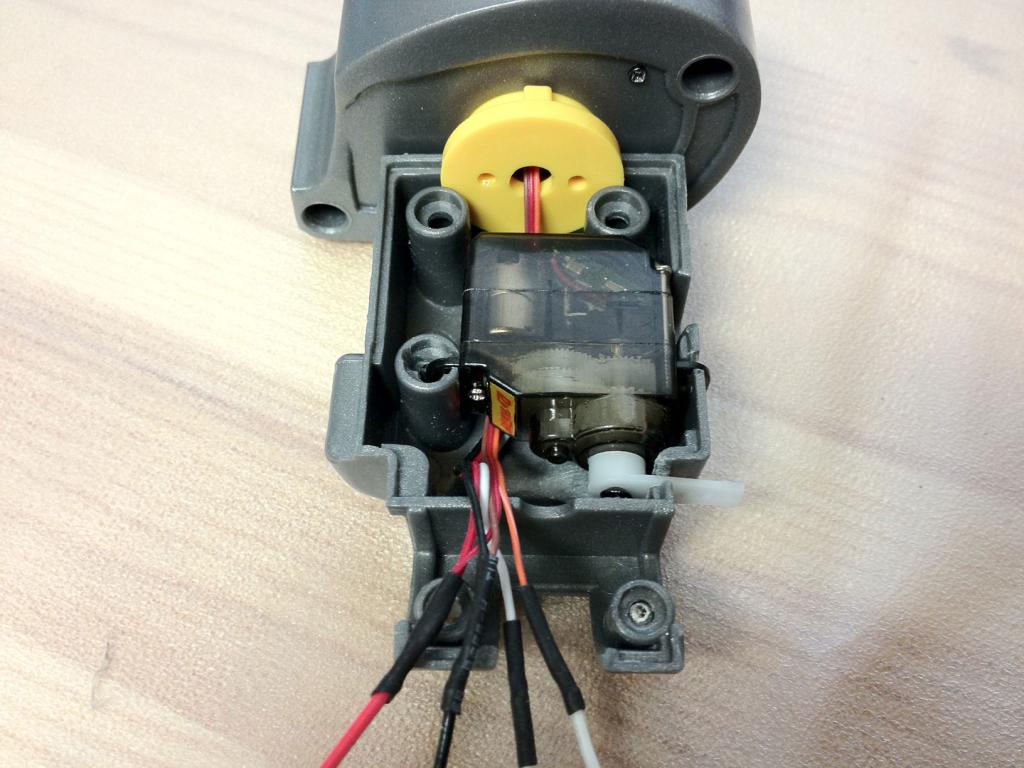
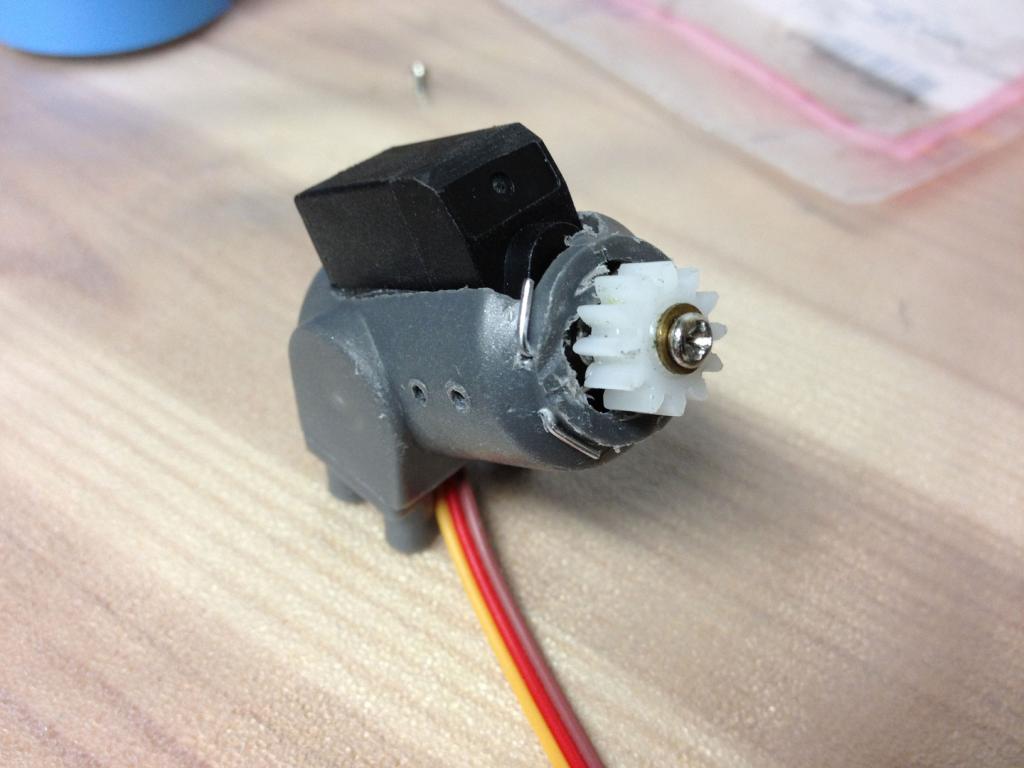
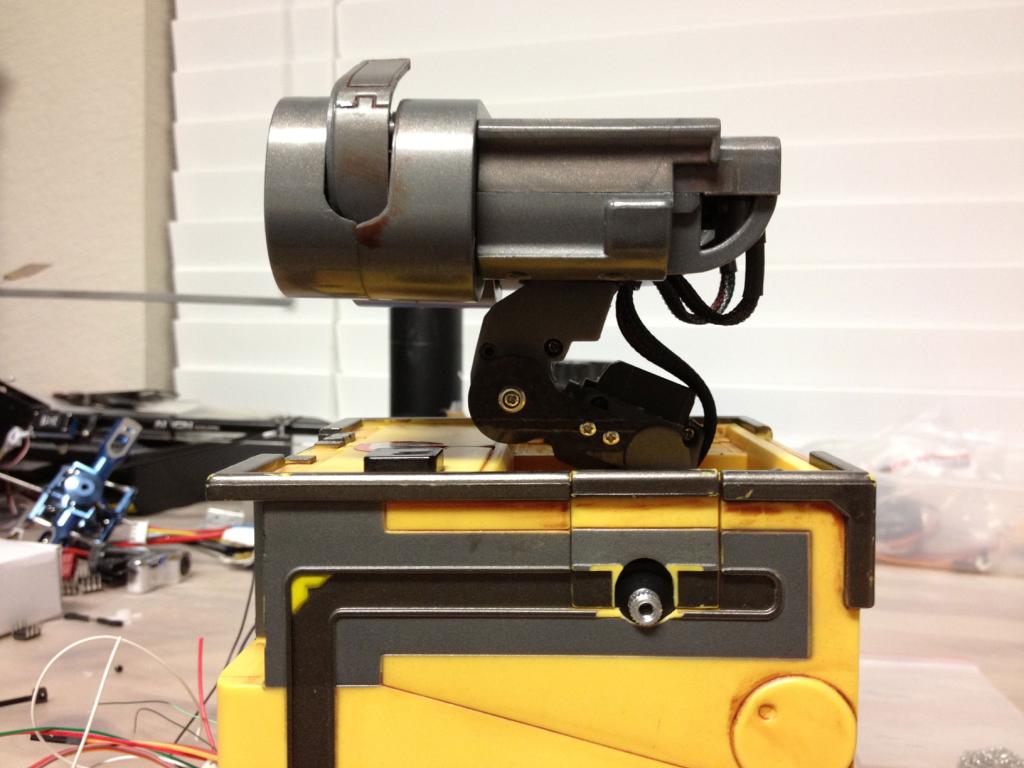
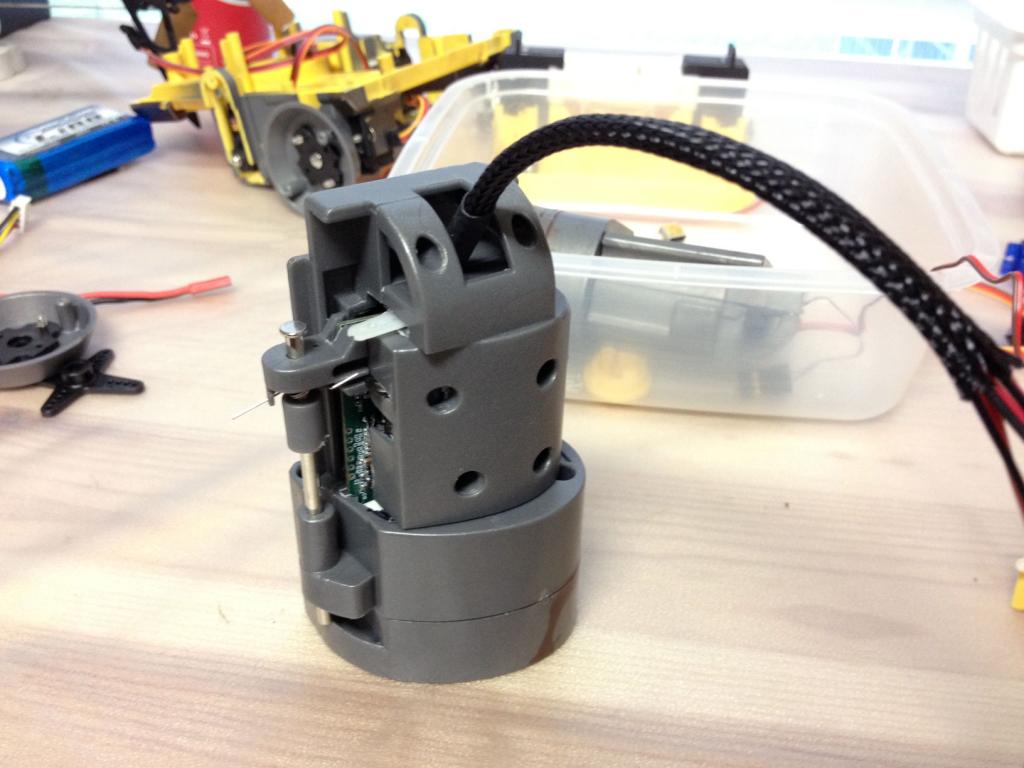
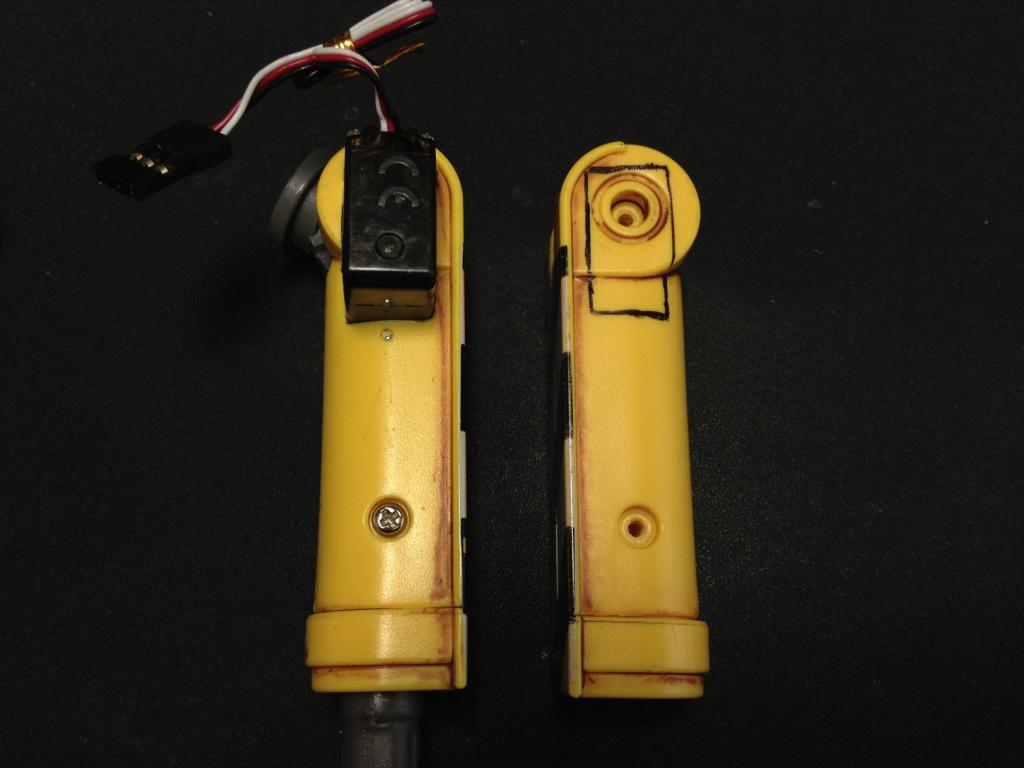
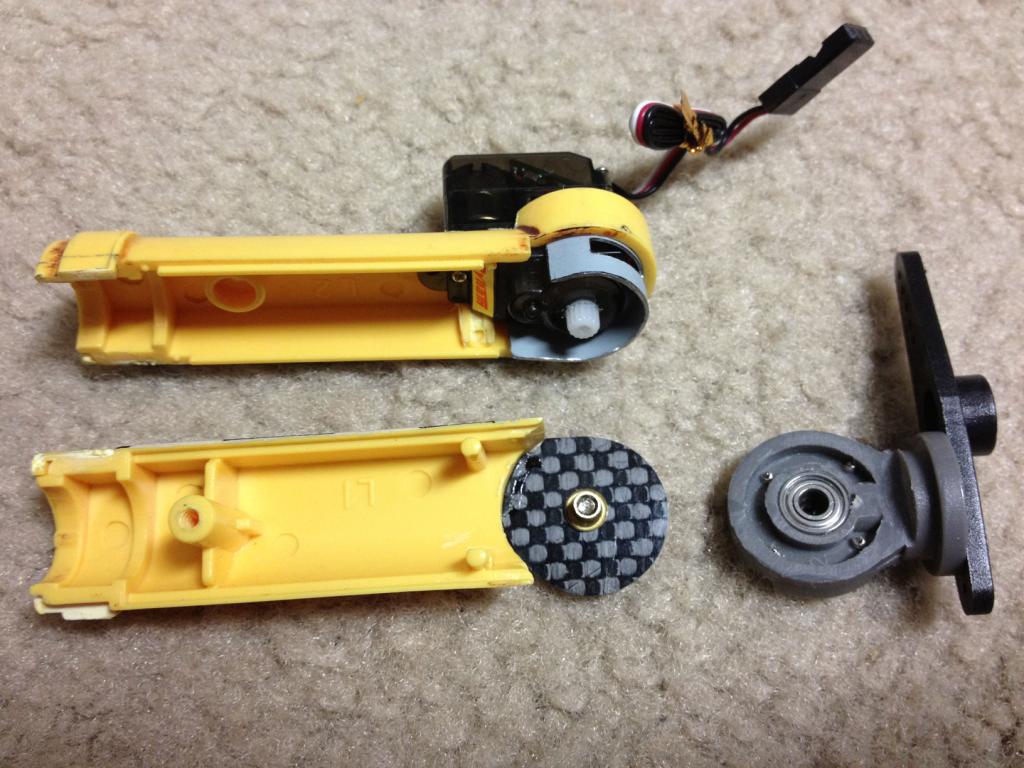
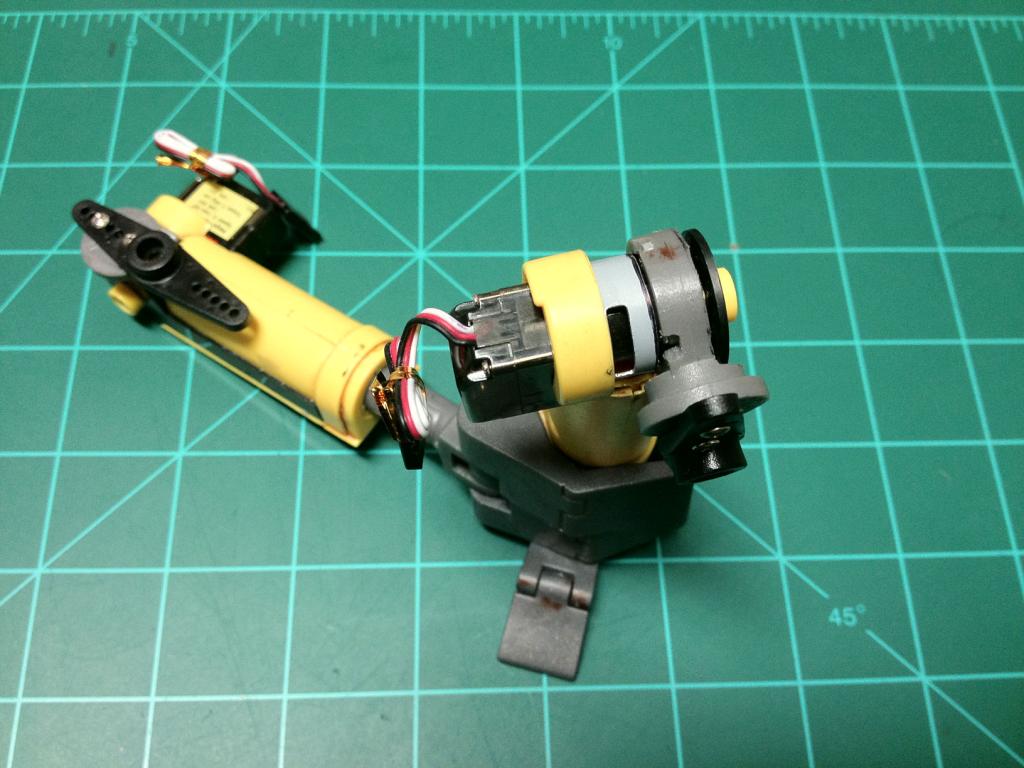
Micro metal gear servo for vertical neck tilt.
Mini metal gear servo for horizontal neck movements.
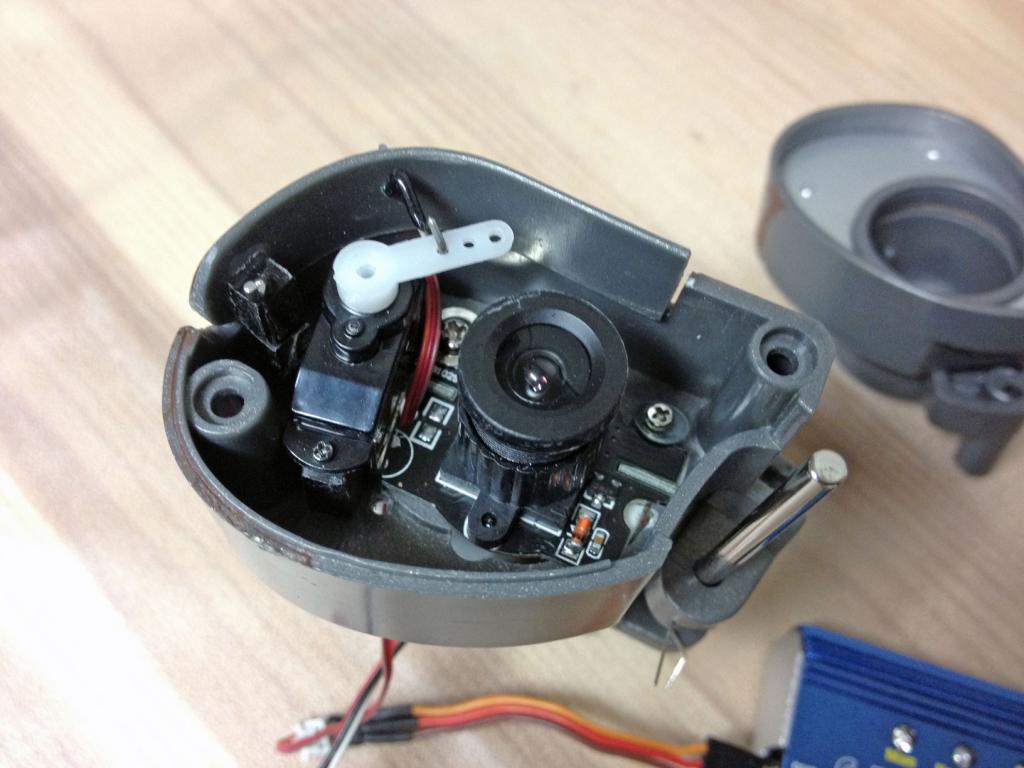
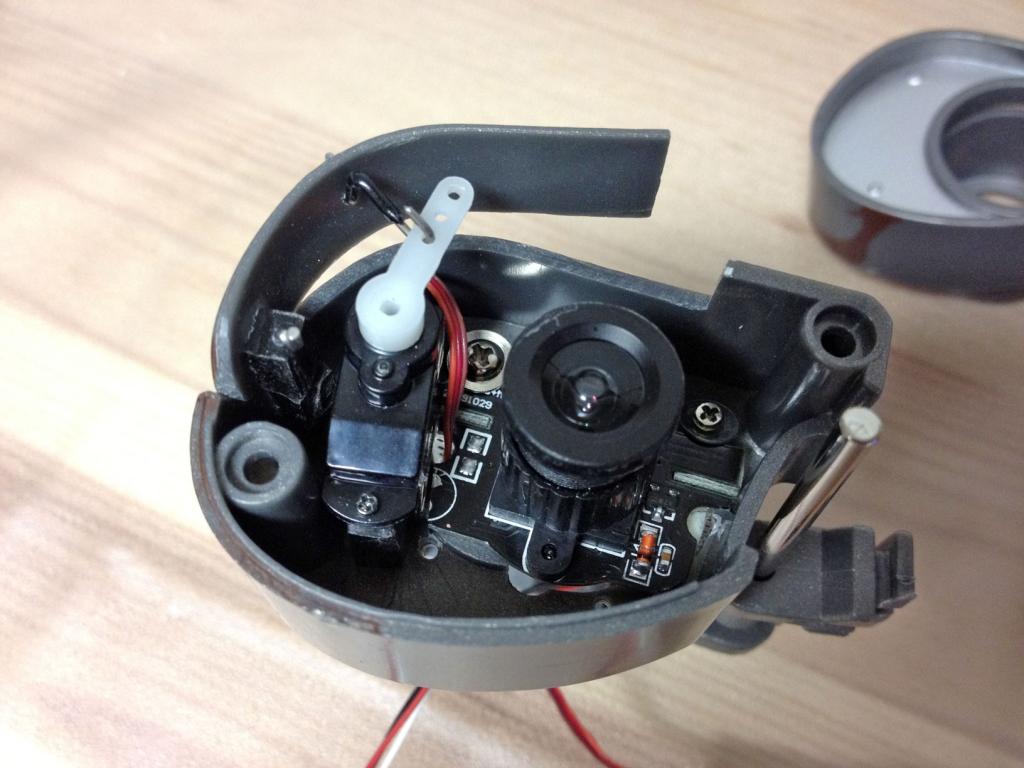
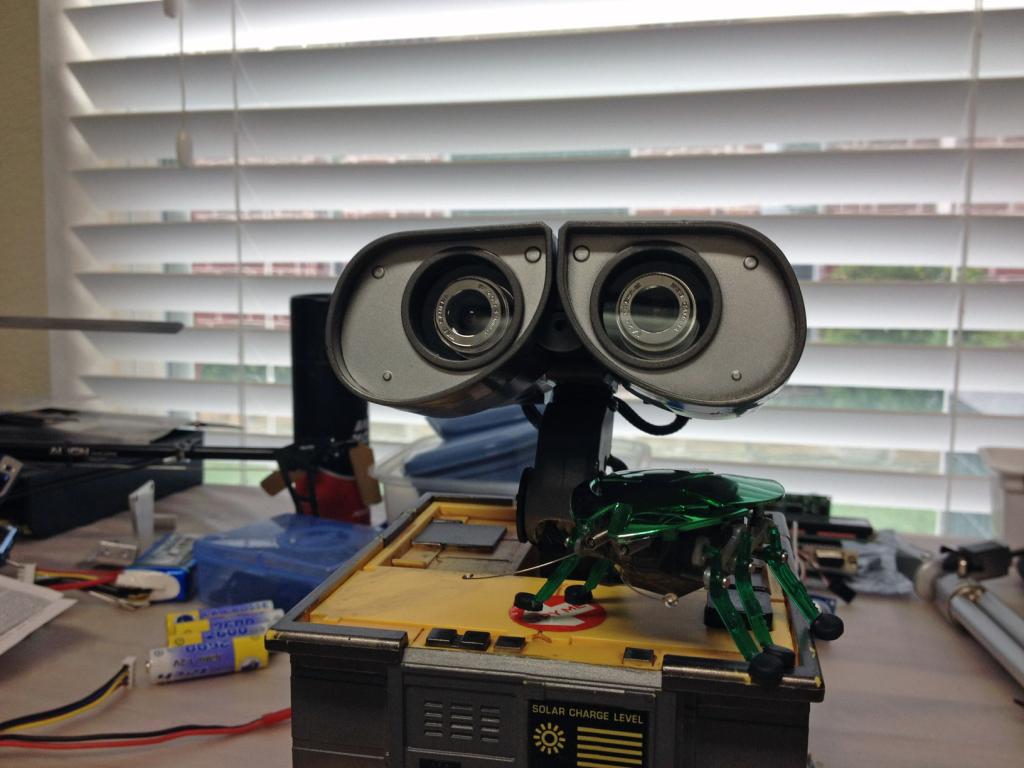
Micro servos for individual eye movement.
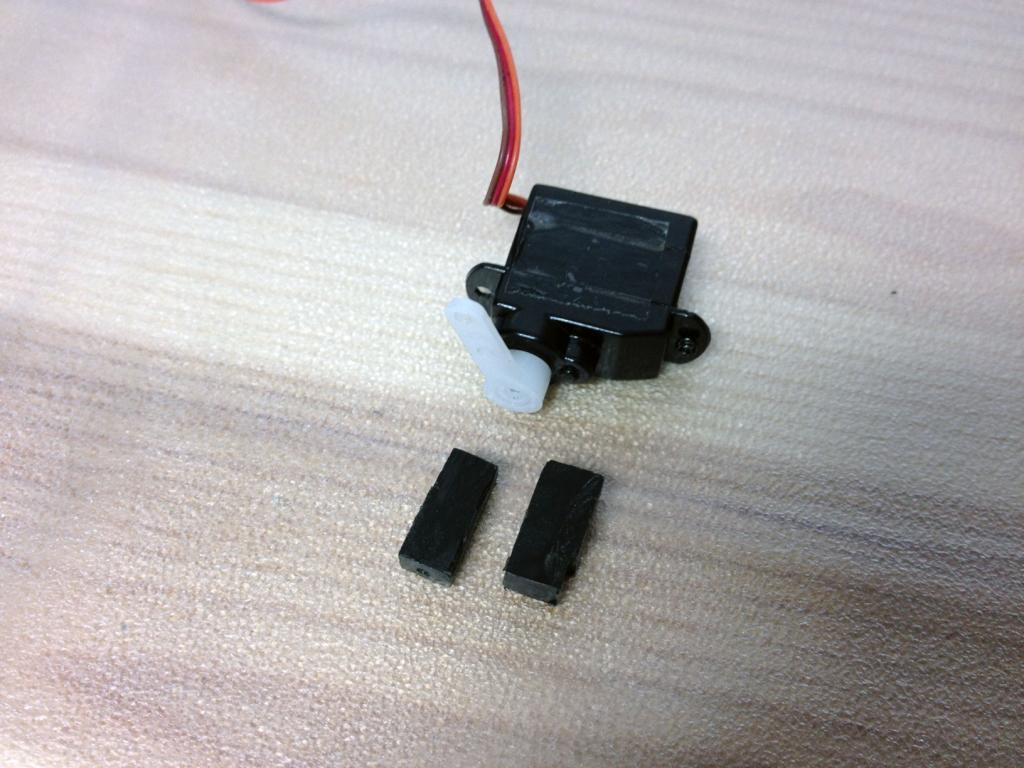
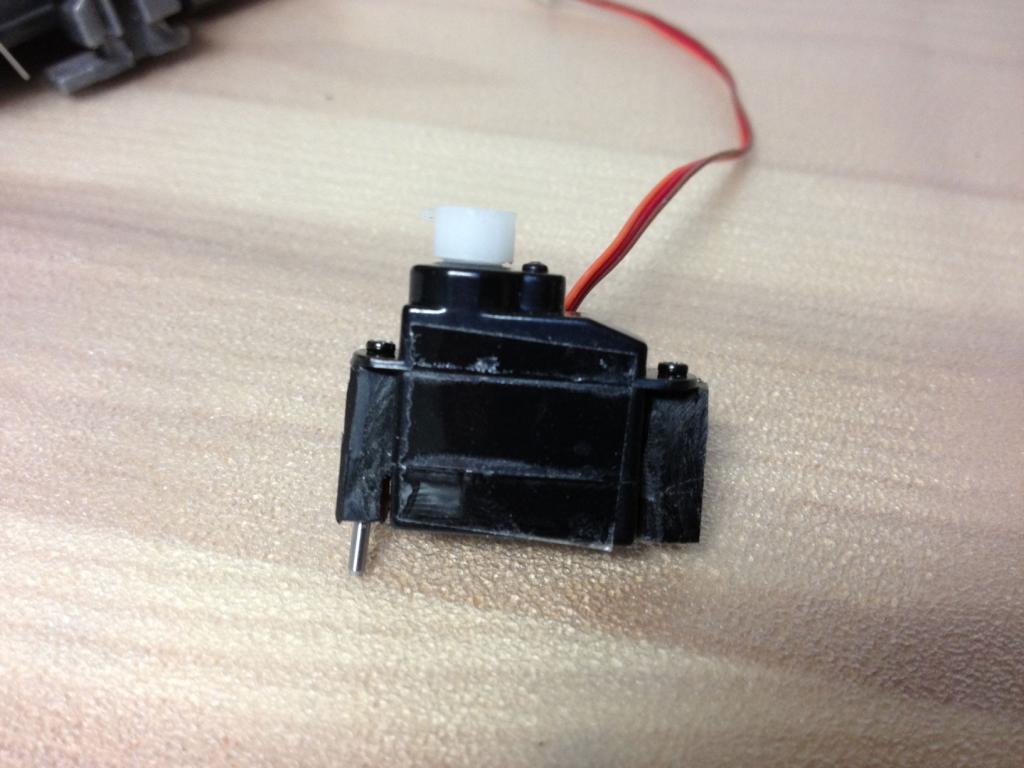
Sub-micro servos/mods for eye's lid animation.
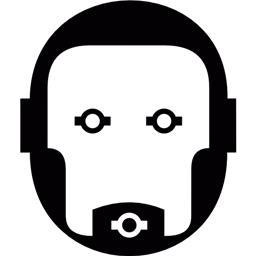
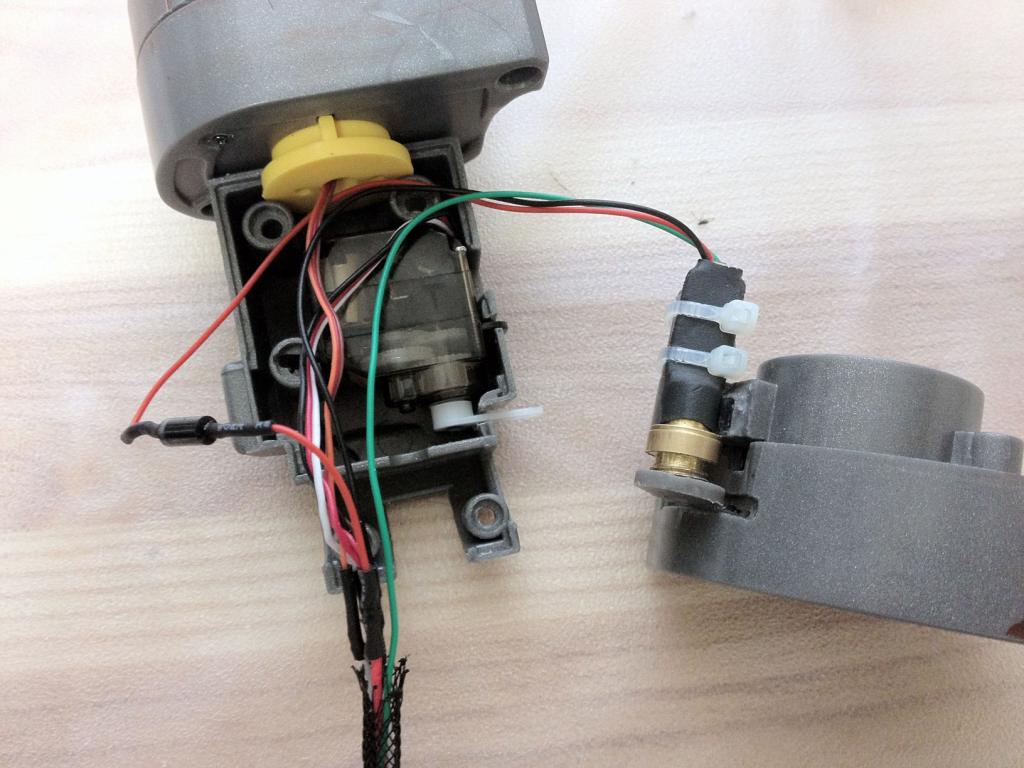
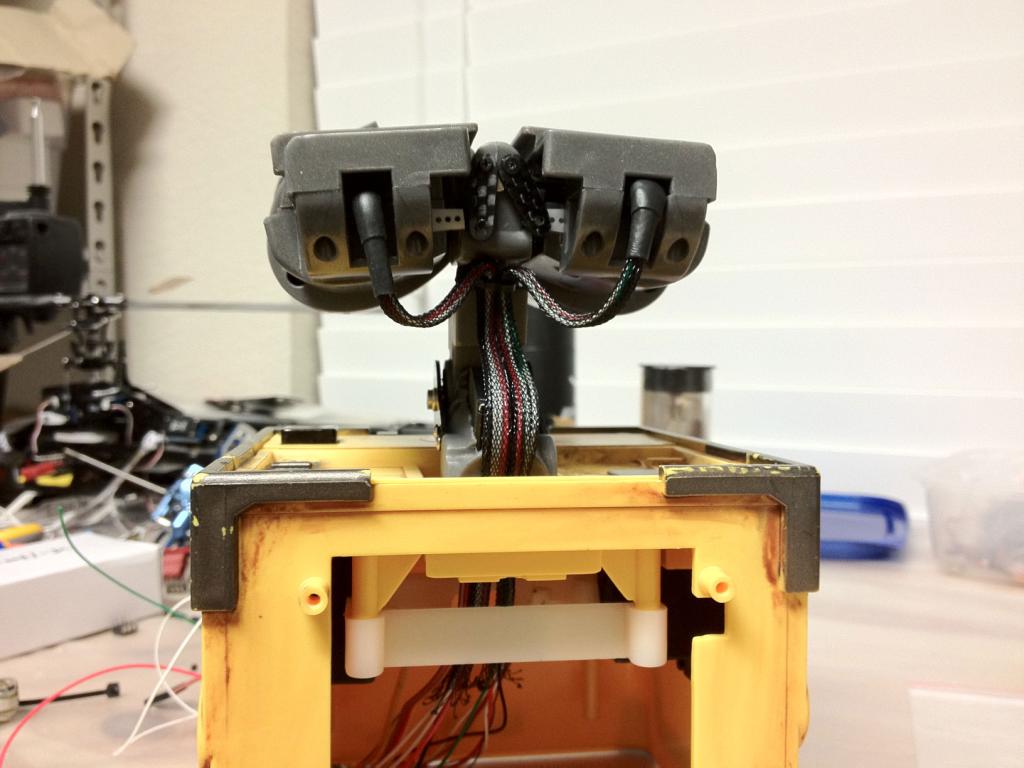
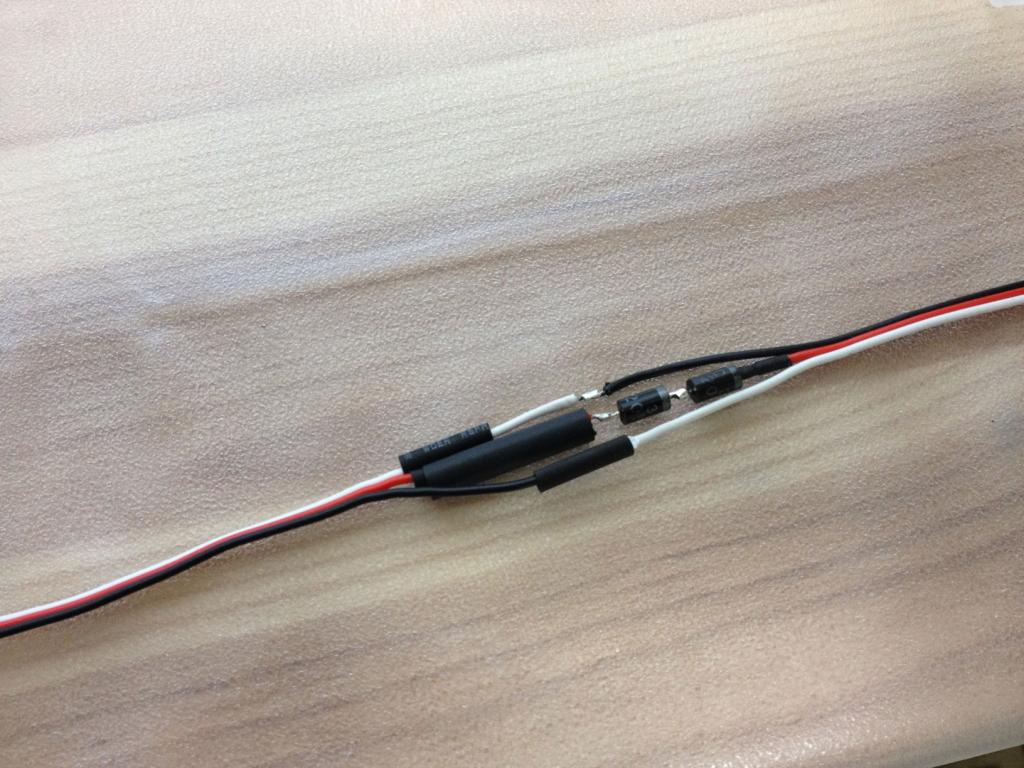
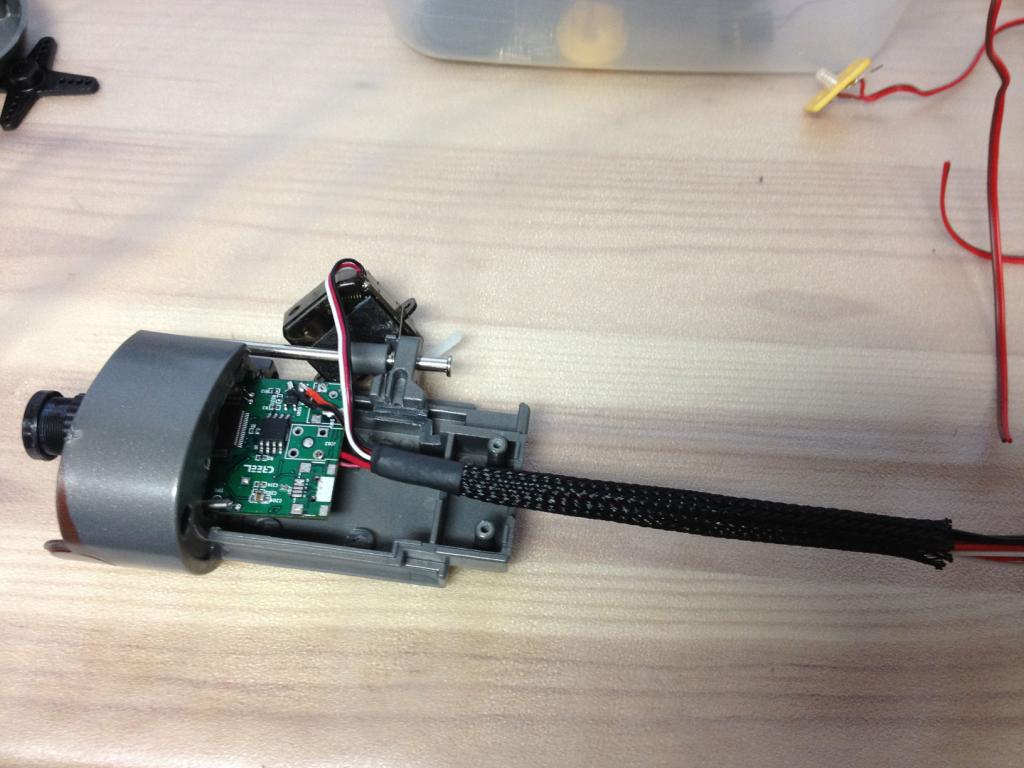
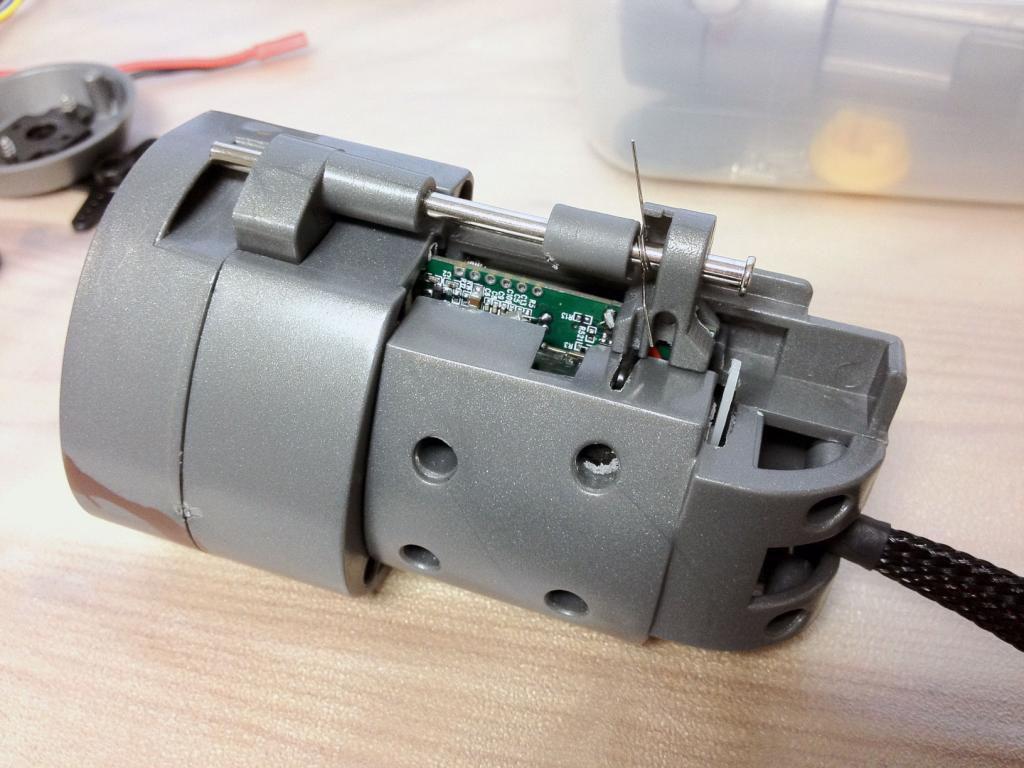
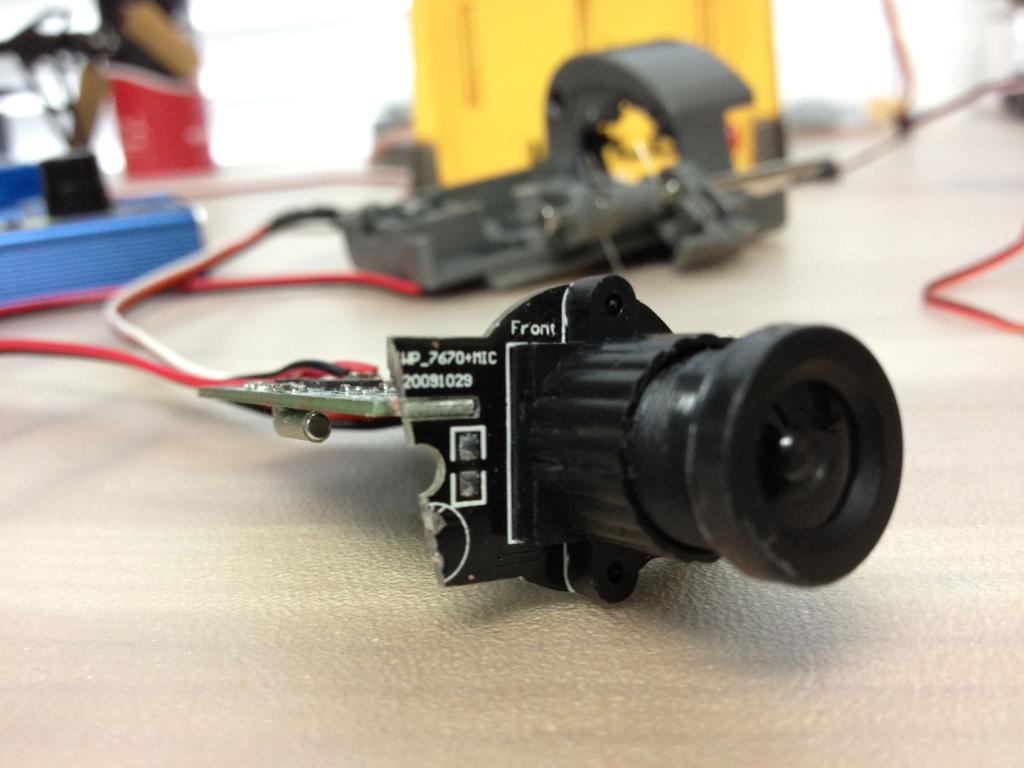
Get rid of dummy cables in the head, run all servos/camera wires from head down the same way and use heat shrink/black nylon mesh for realistic look.
Red laser between eyes.
Mock up left eye's lens.
Other things to be added/changed as i go
Yet to be done:
Light up solar panel (most likely, still thinking) Red LED in front in the black spot next to the solar panel (definitely) Make his wrist rotate (don't know yet, still thinking)












Discover more robots
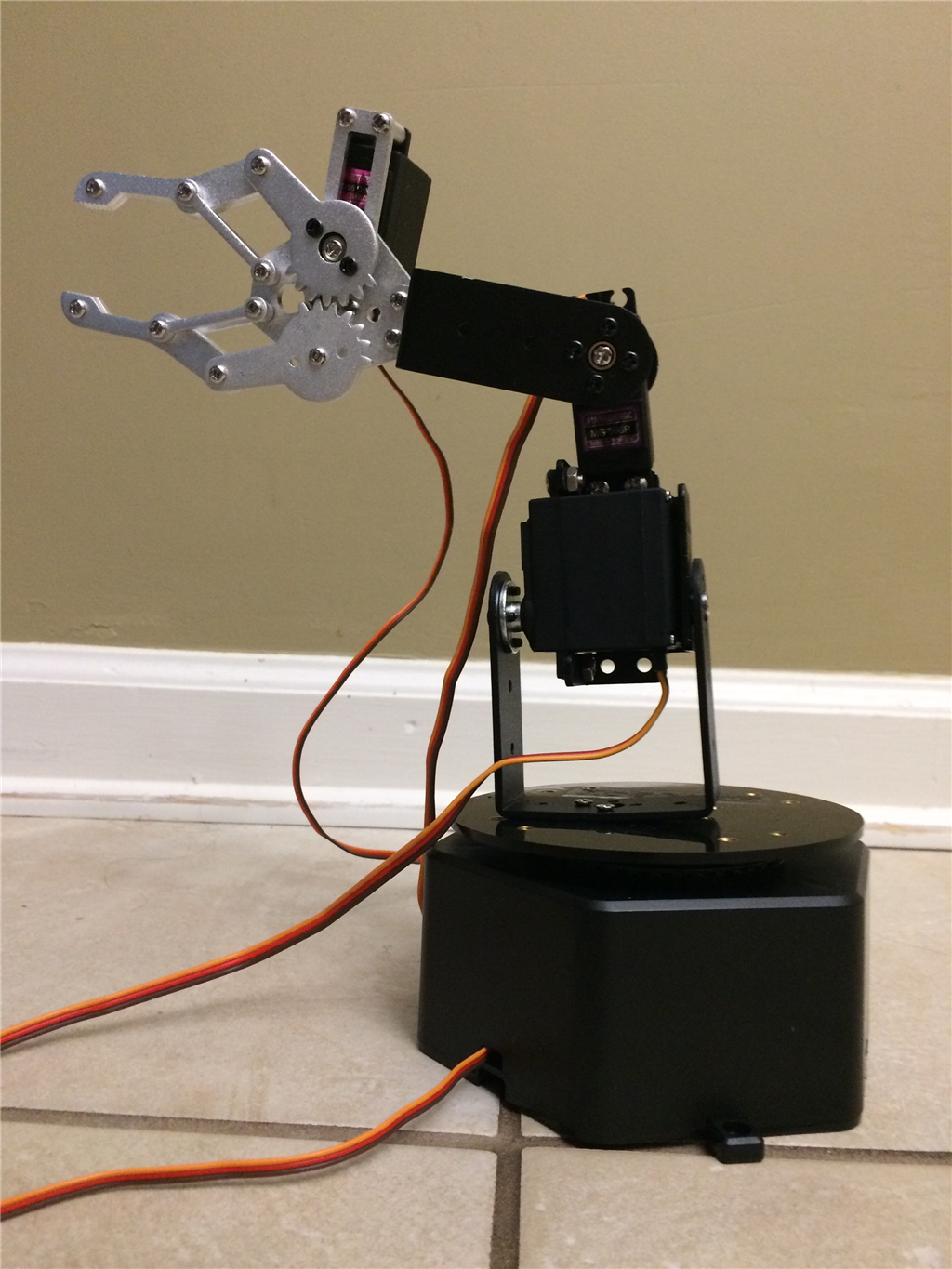
Ezang's My New Robot Arm On ARC
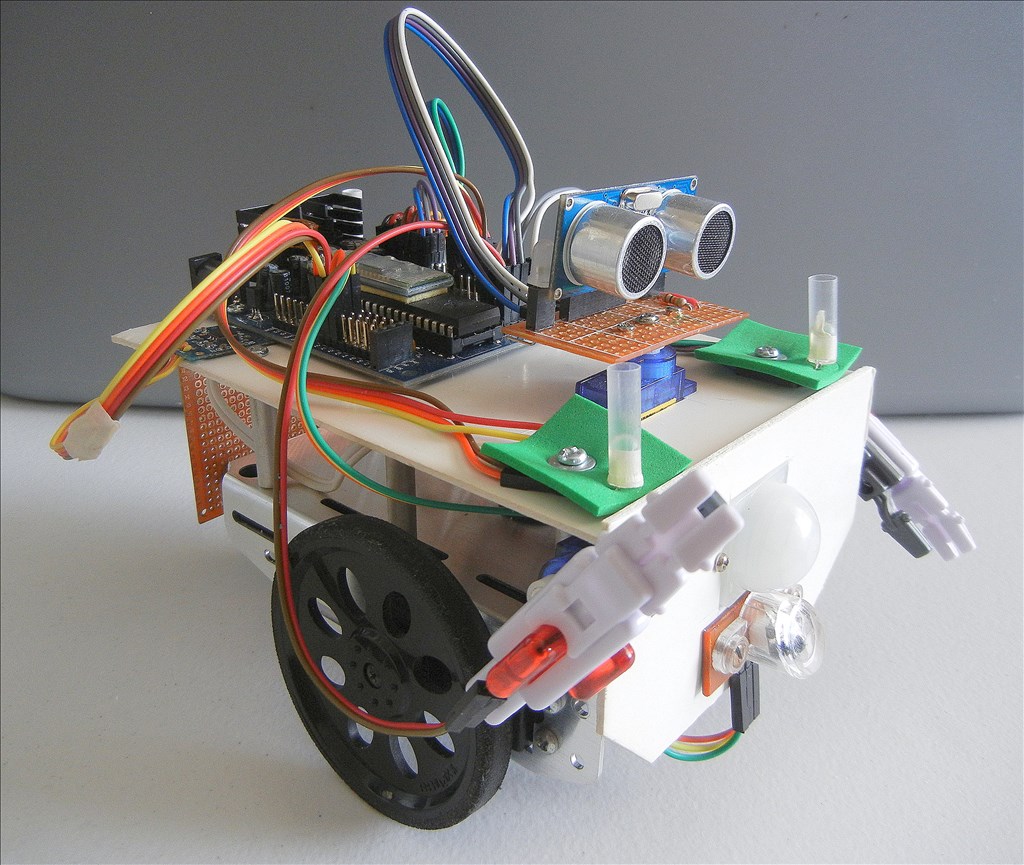
Pashley's Ez-Bo, My Experimenting Robot


When I had my Wall-e running it would drop if released. Im sure yours might too specially if driving on them.
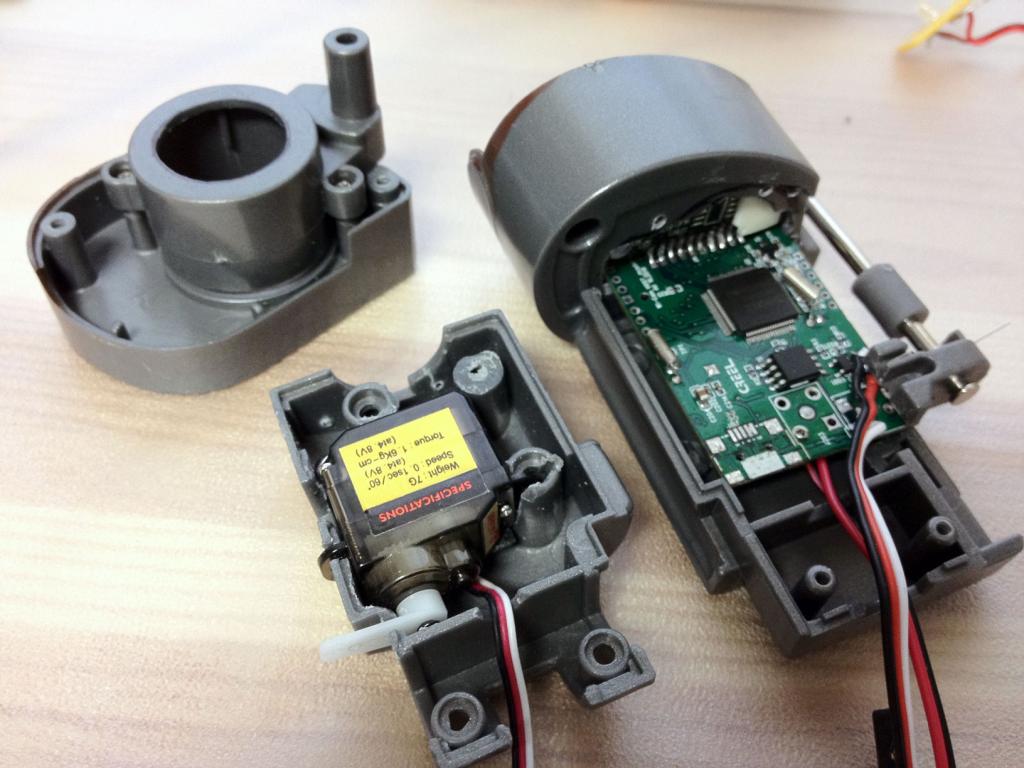
DJ...They're rated 3.5kg-cm on 5v and 4.2kg-cm on 6V, i think the same or stronger than standard servo, they're mini servos not micros, I'm getting used to digital servos buzz when they're idled, but this one is rather loud rattling sound is annoying, sometime it stop sometime on its own sometime it won't until i give it a nudge. What do you think about switching PCB out from another servos? could i turn it into analog servo? They're cheap anyway so i don't mind experimenting.
Glickclik...I will see what happen when i get to it. If they get too hot holding, i will change to stronger servos, which mean redoing carbon reinforce plates im trying to avoid.
Digital servos are buzzing as they are seeking to accurately keep a specific position. Digital servos should be faster, more accurate and adhere to the center position. However, they also need more amperage and thus more capacity and heavier batteries because of their (digital) servoamplifier . Moreover, they are more expensive than analog servos and in my RC models I noticed almost no difference from analog and digital servos. These are the reasons why I equip my other RC models, only the analog servos (also without buzzing).
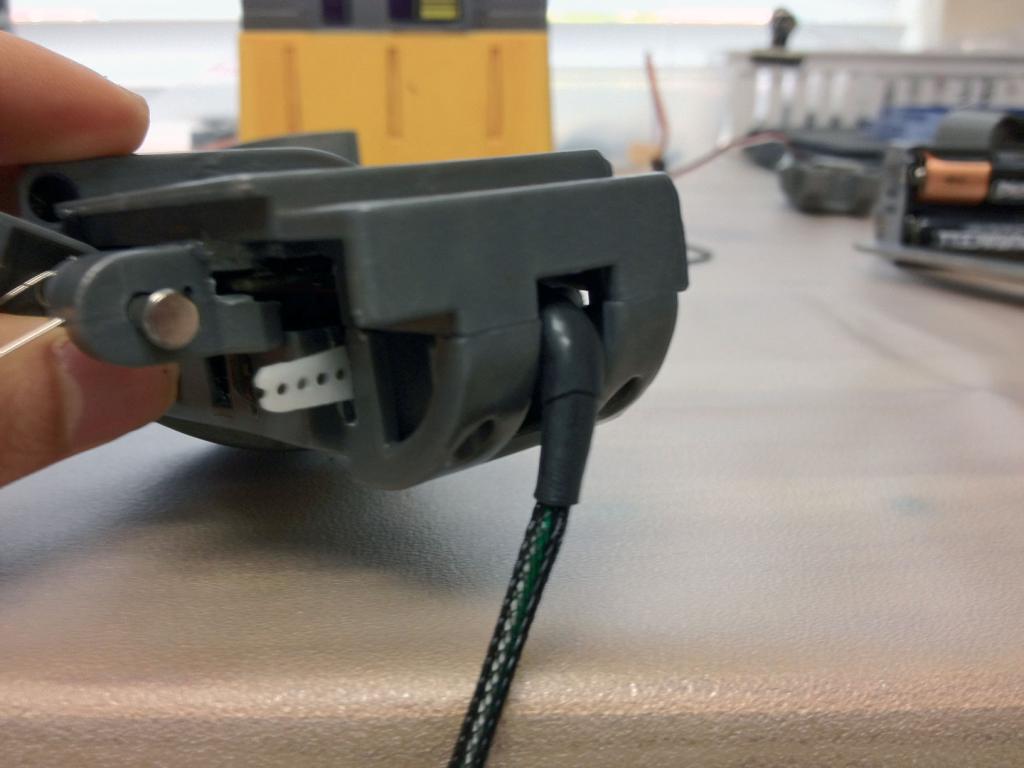
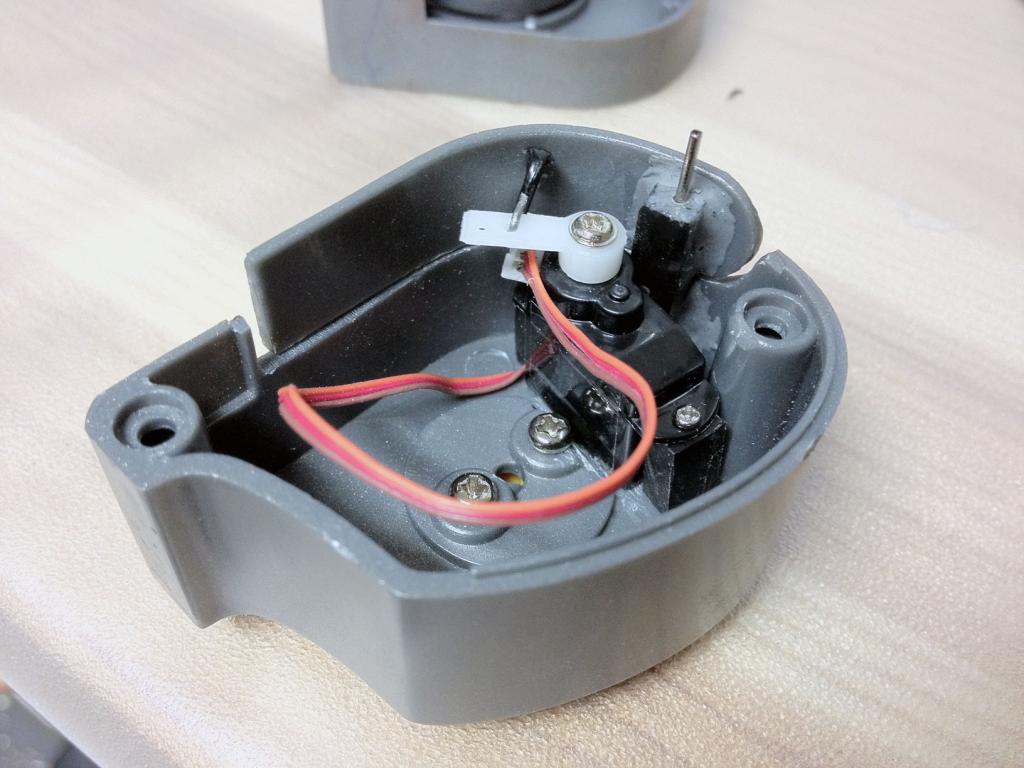
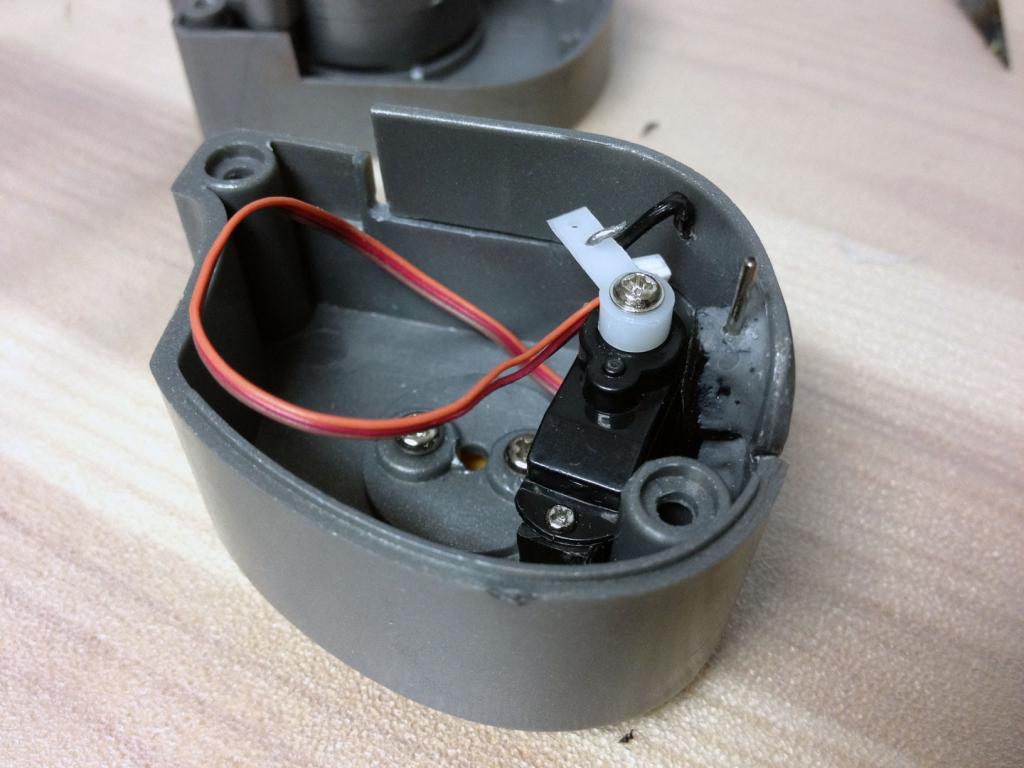
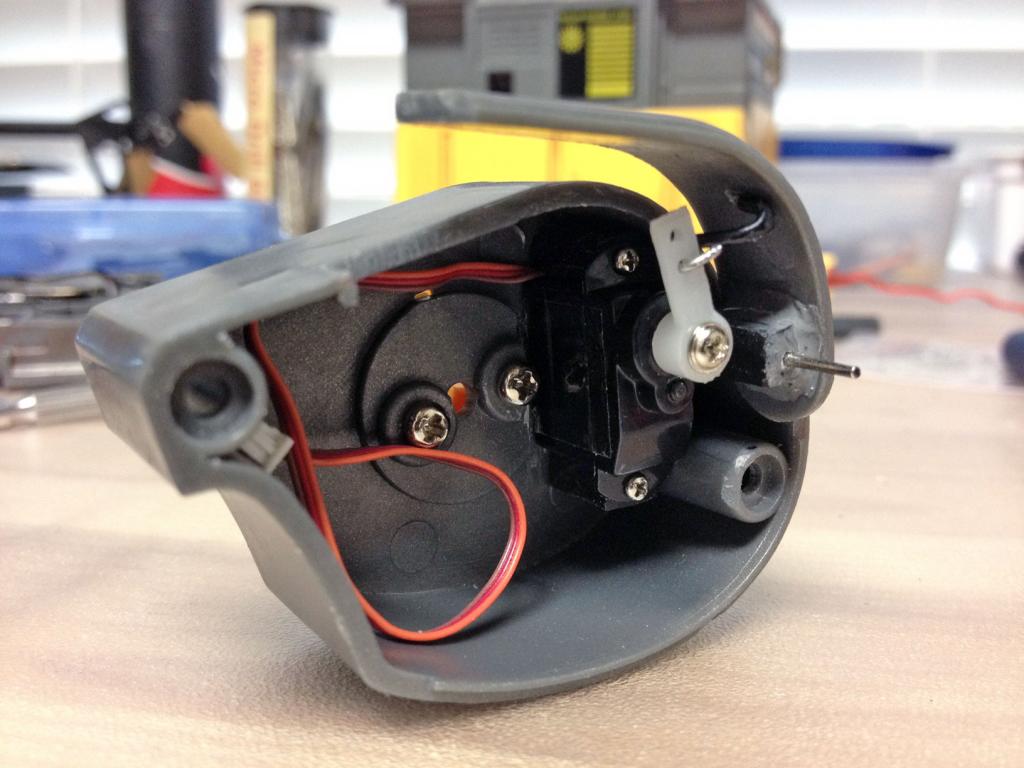
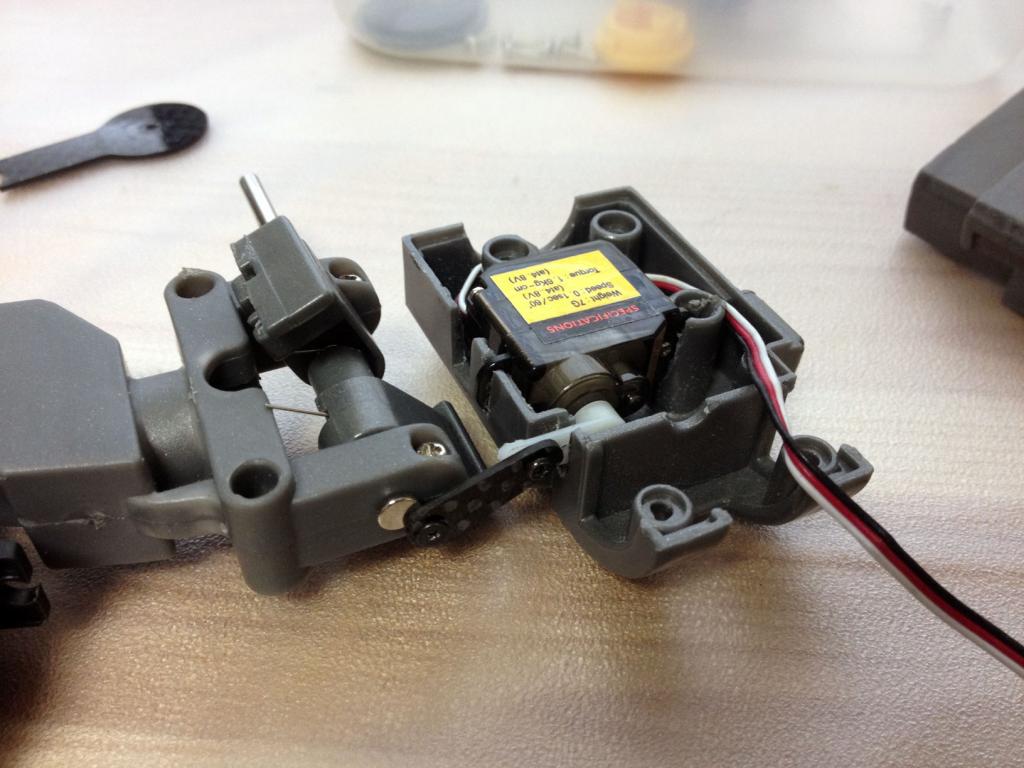
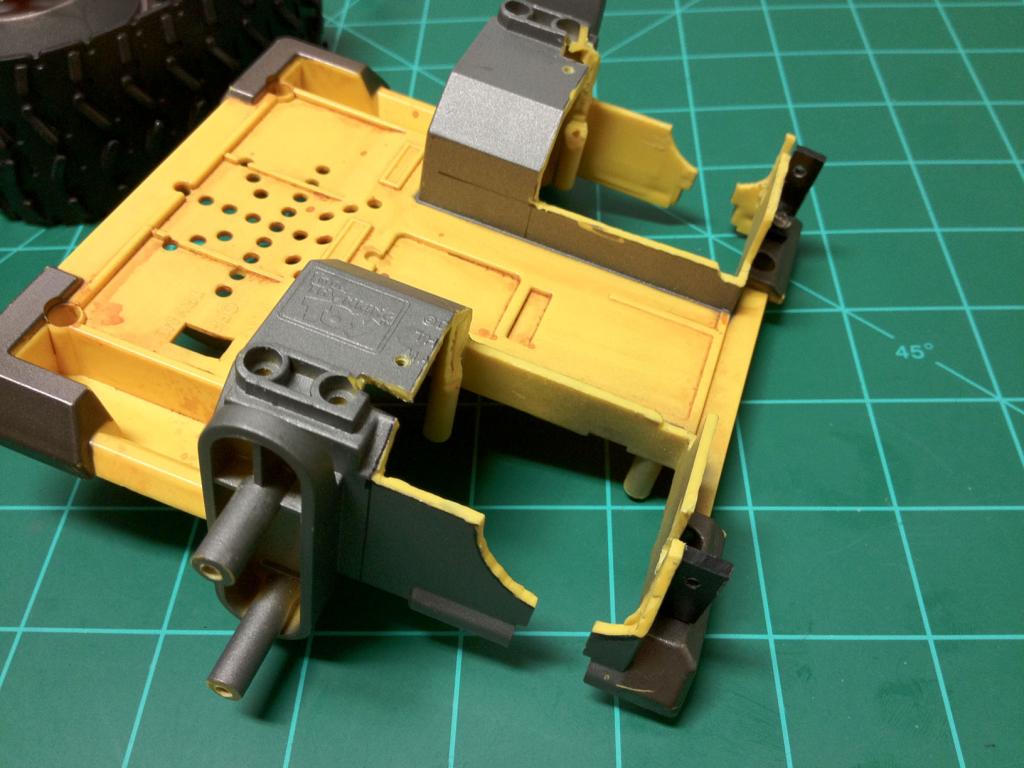
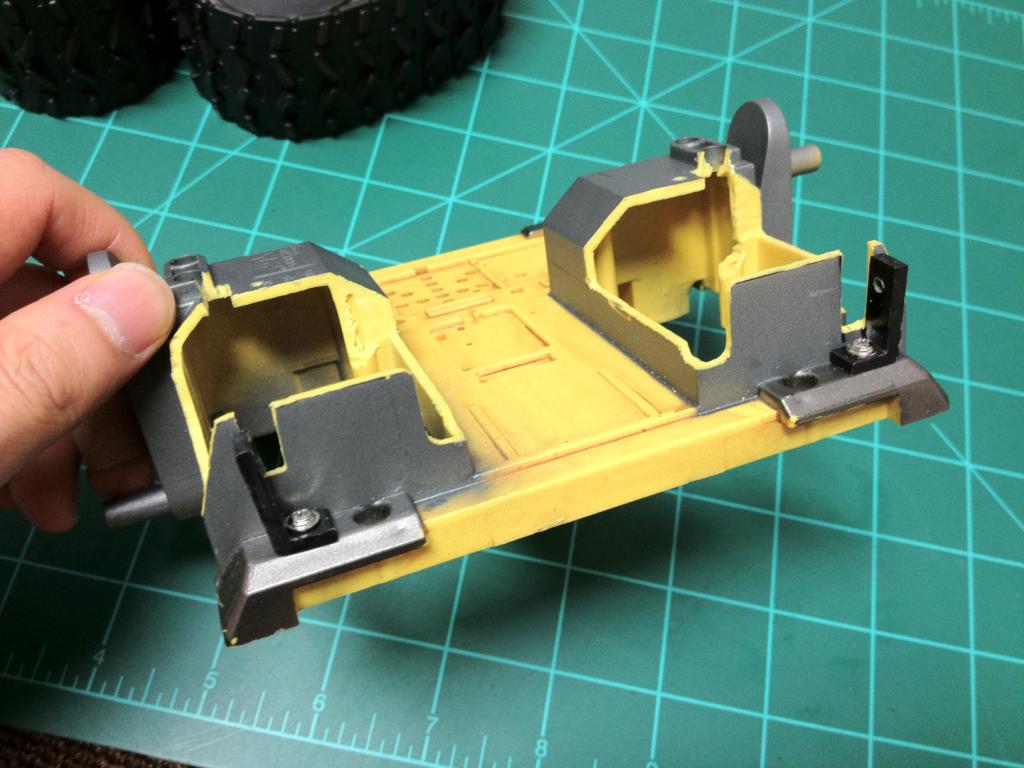
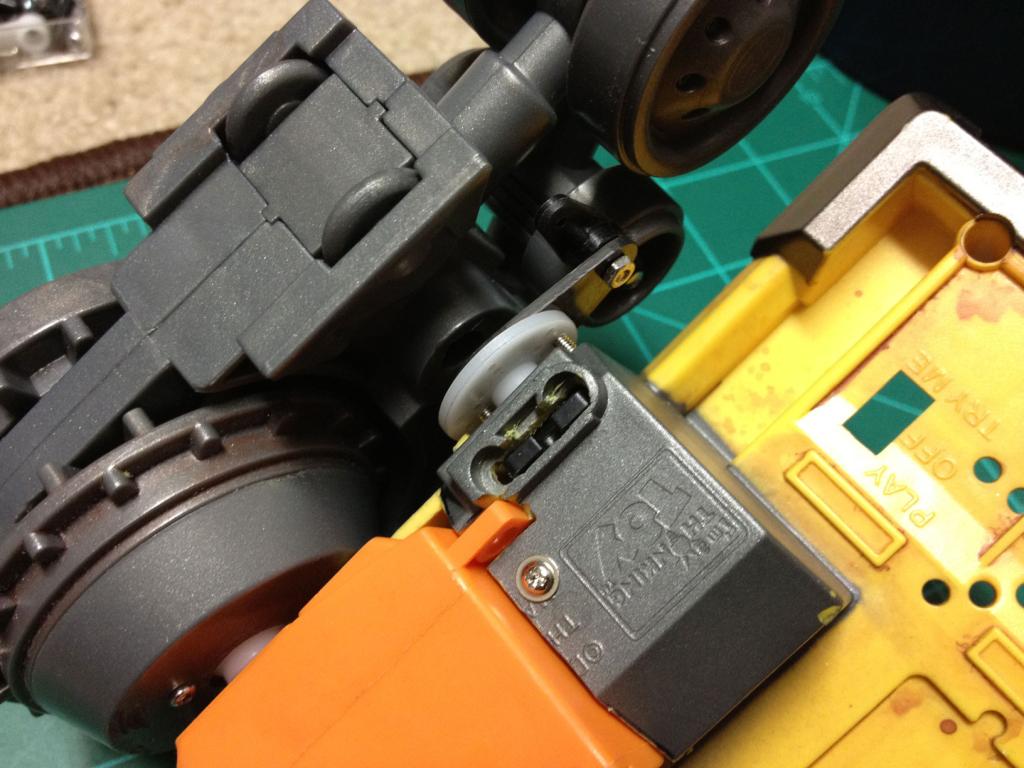
I put Wall-E together but come across a big problem. The wheel bottom tilt pivot being held by the servo horn, leaving the top free to move (originally there are two screws holding the wheel assembly in place), the weight of Wall-E press the wheels assembly inward, when the tracks run, the tracks pushed outward and came off on their own. I think i need a dummy pivot on top to keep the wheel from moving inward and track from coming off, not sure if that's what i need to fix it.
That really sucks. I liked the way you did yours too. You're pretty creative so I know you will figure a solution.
You're pretty creative so I know you will figure a solution.
Thanks...I hope I can fix this, if not i might have to get rid of tilt . I was very frustrated as i was driving him thru the camera view then my dad goes: hey Wall-E, your tracks came off! I was like what??? haha...But at least the servos held up fine while driving.
. I was very frustrated as i was driving him thru the camera view then my dad goes: hey Wall-E, your tracks came off! I was like what??? haha...But at least the servos held up fine while driving.
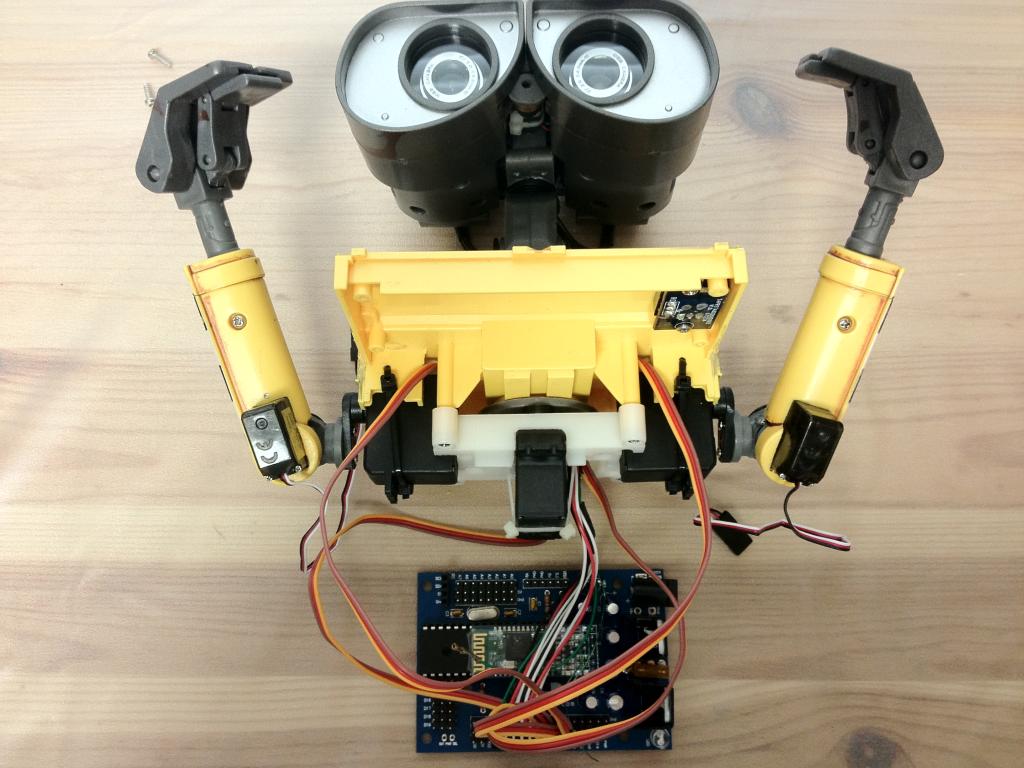
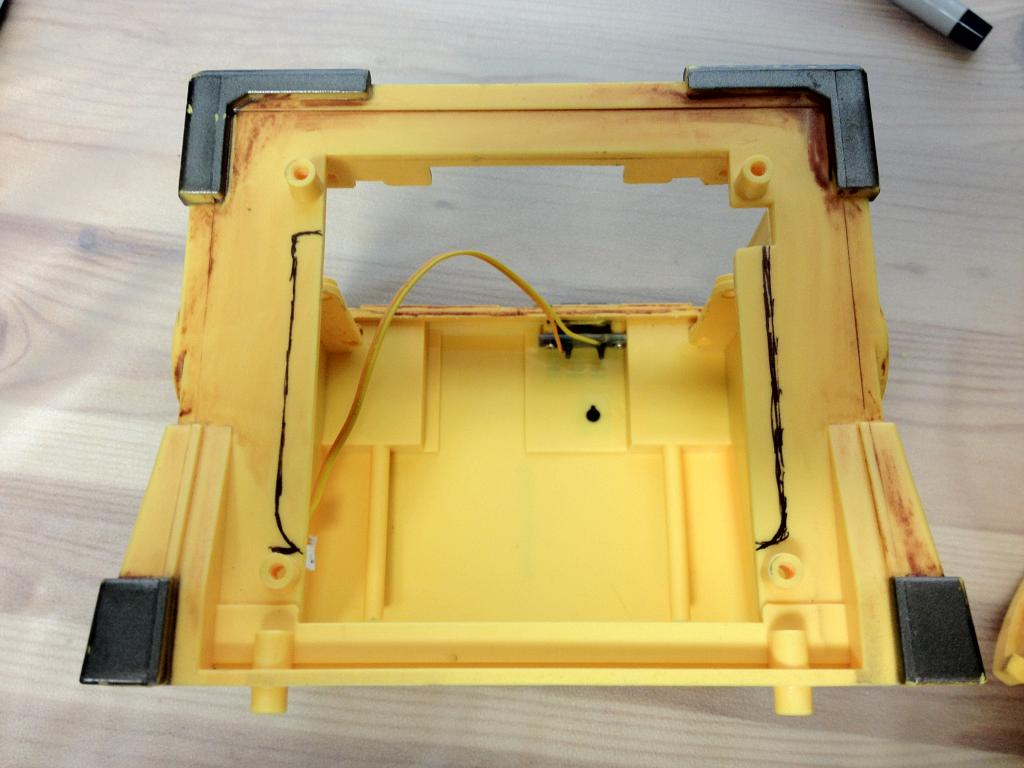
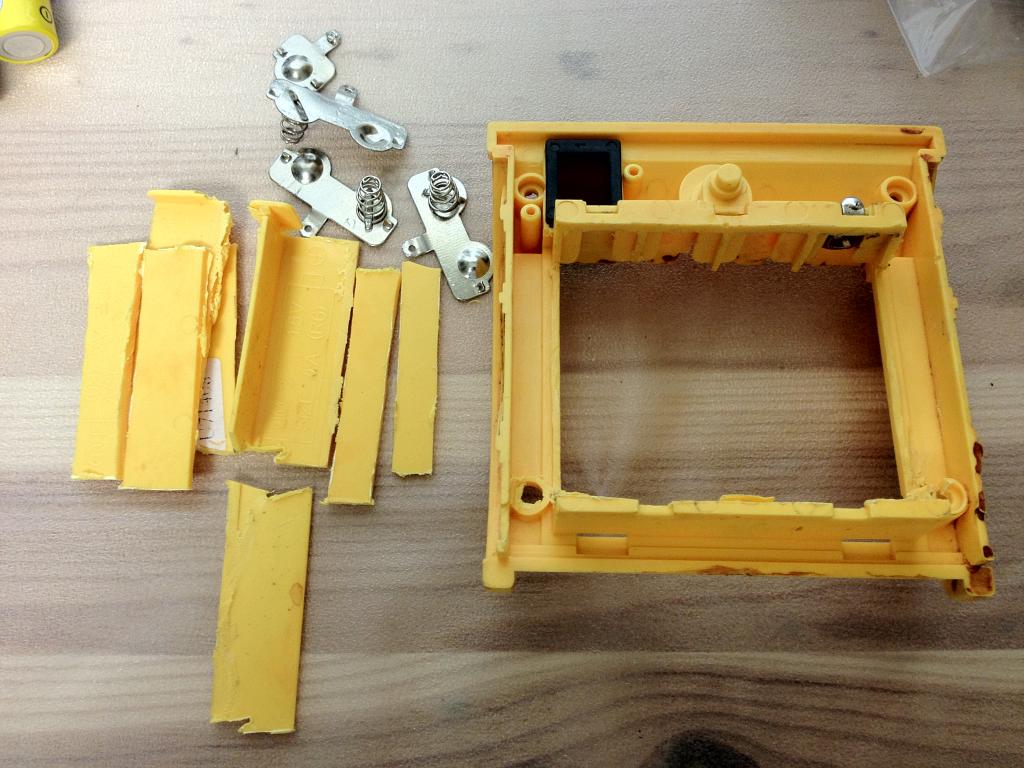
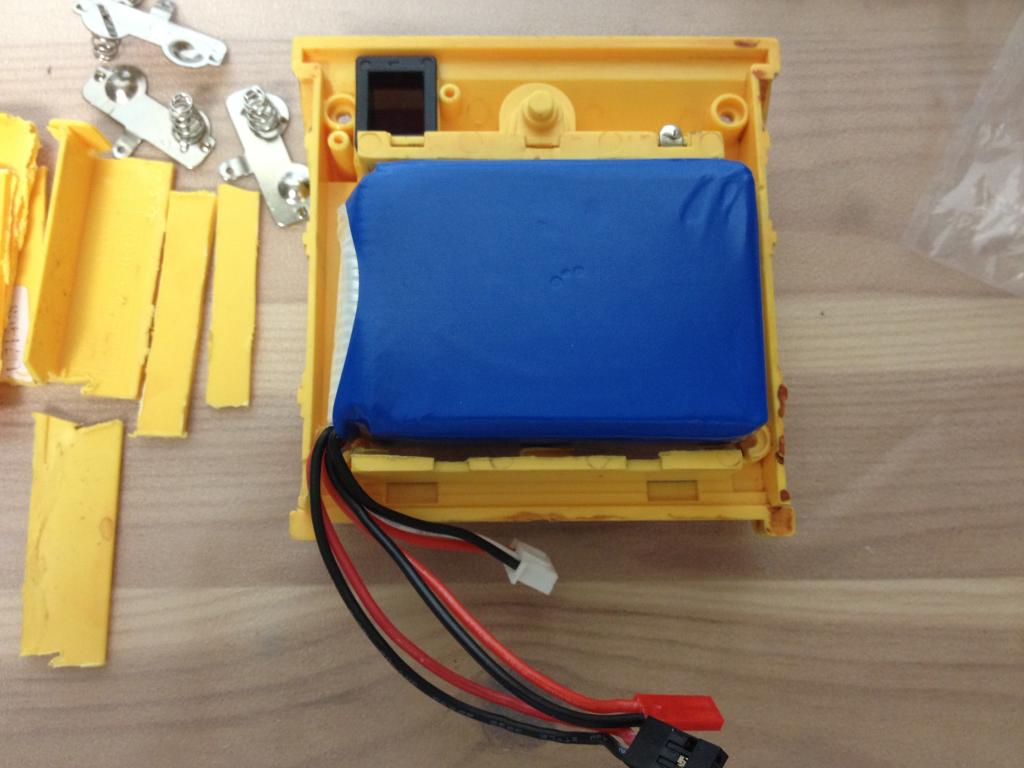
Here are pics of Wall-E arms in place and hacked back cover to fit a 3000mAh 7.4v Lipo pack. I will be using rare earth magnets to attach the back so i can easily open up to recharge.
nice robot iam looking forward for making a cleaning robot using rad 2.0 using ez-b it will be awesome ........................ and your robot is really great good job