




























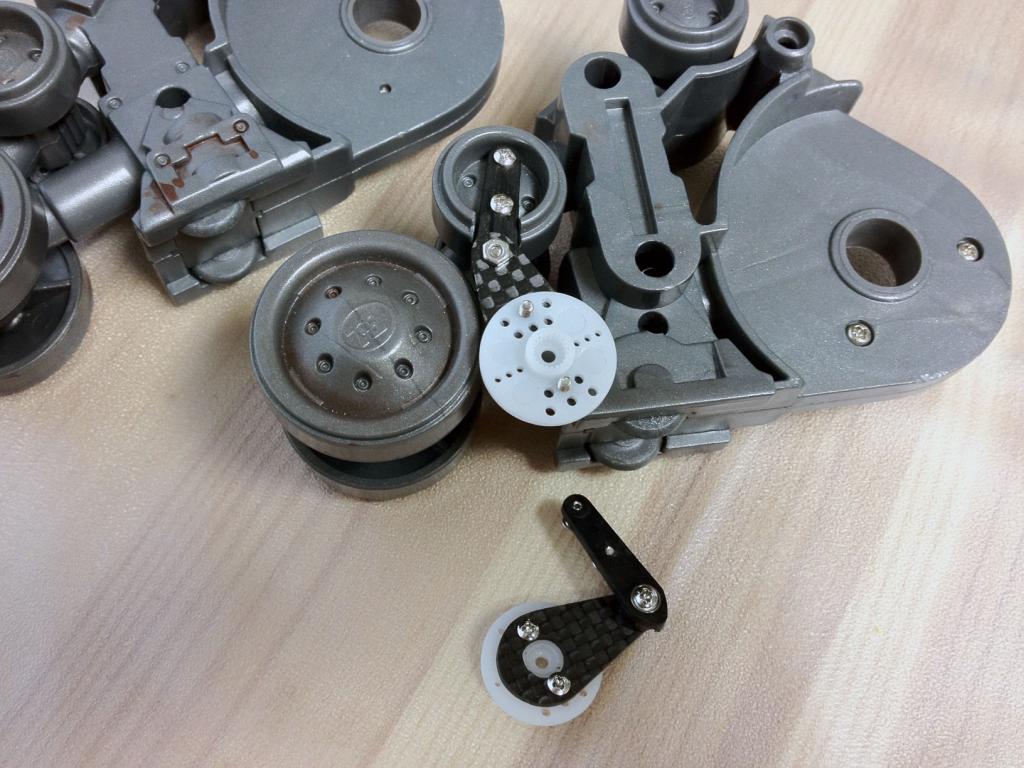




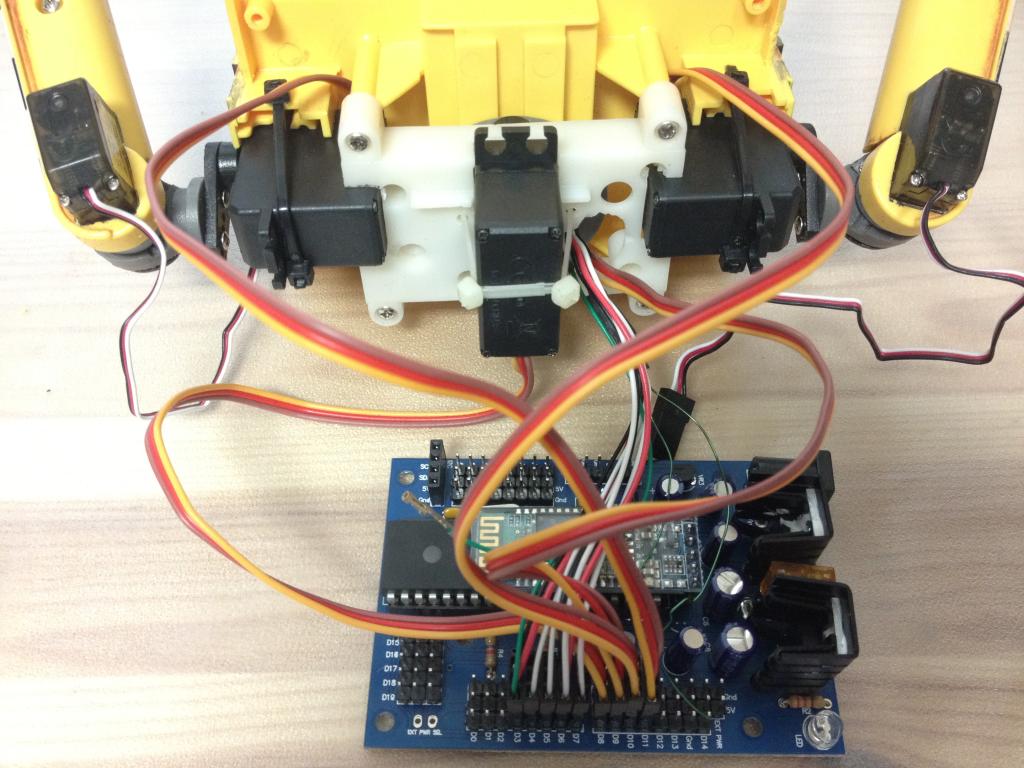
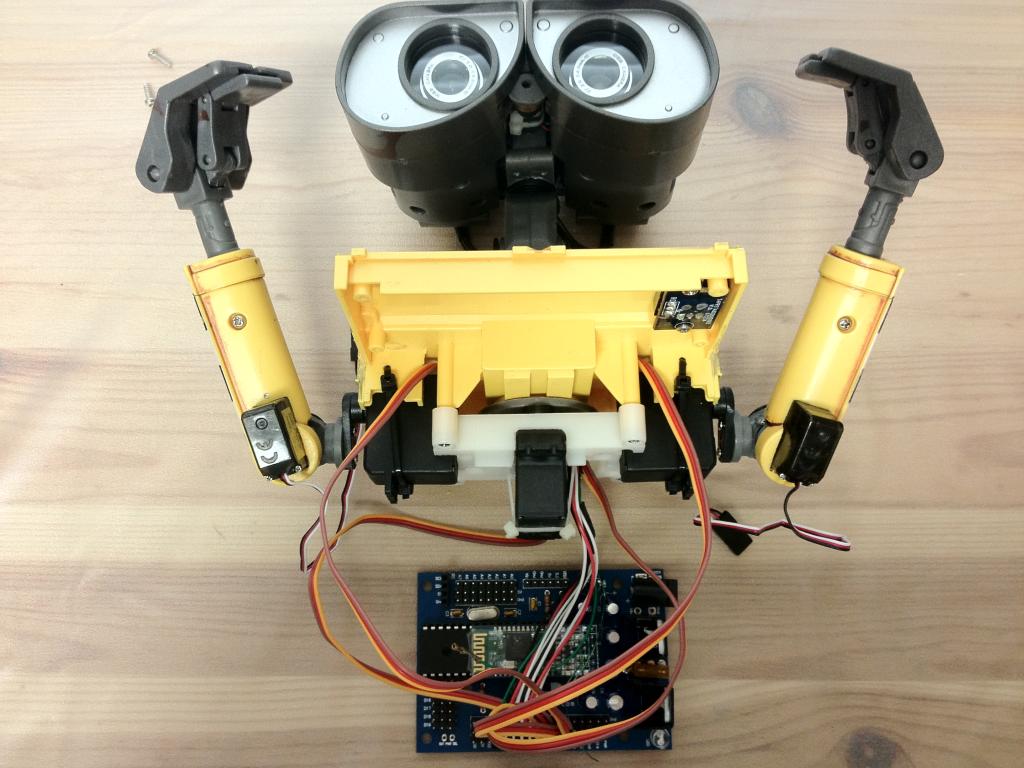
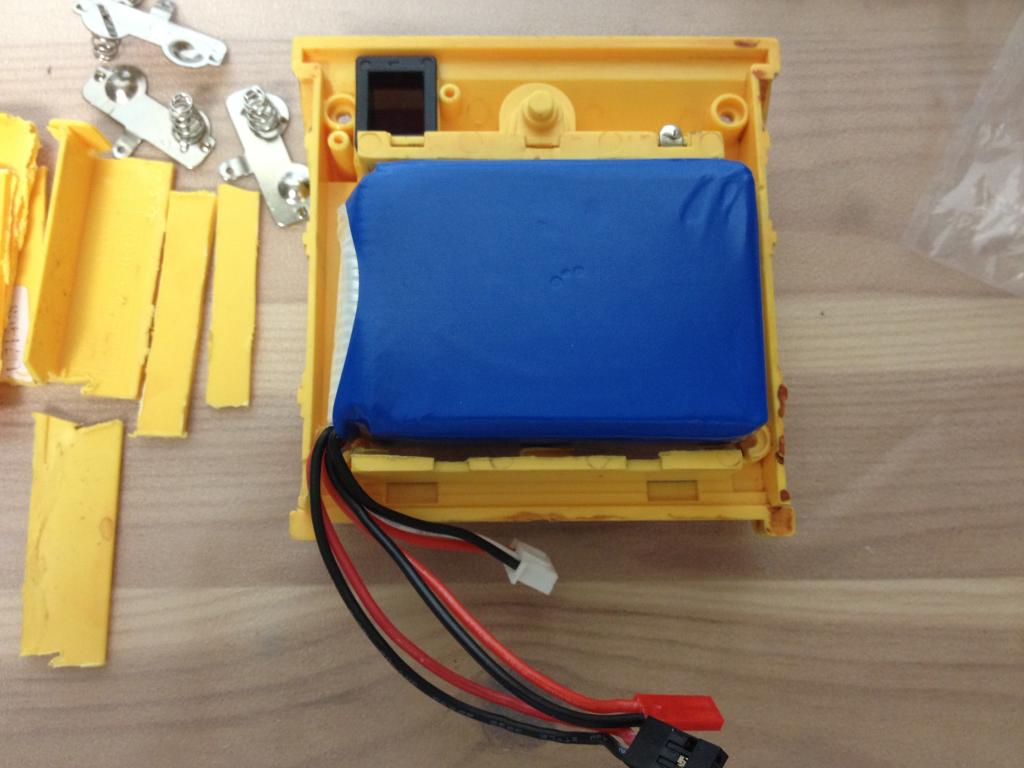
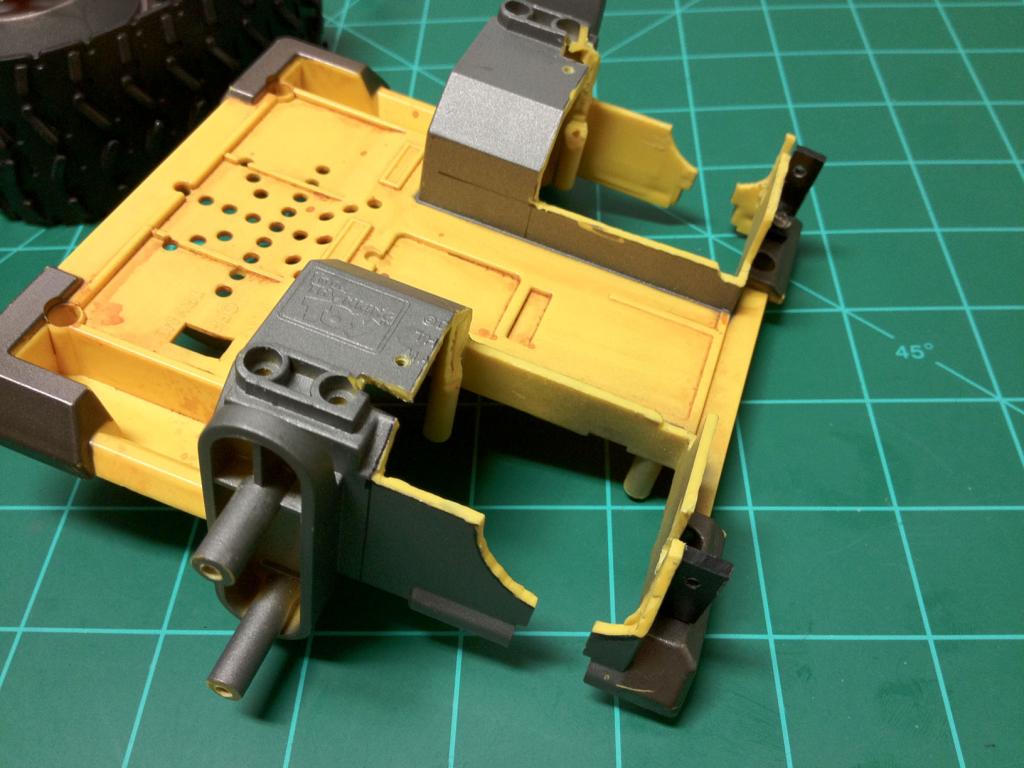
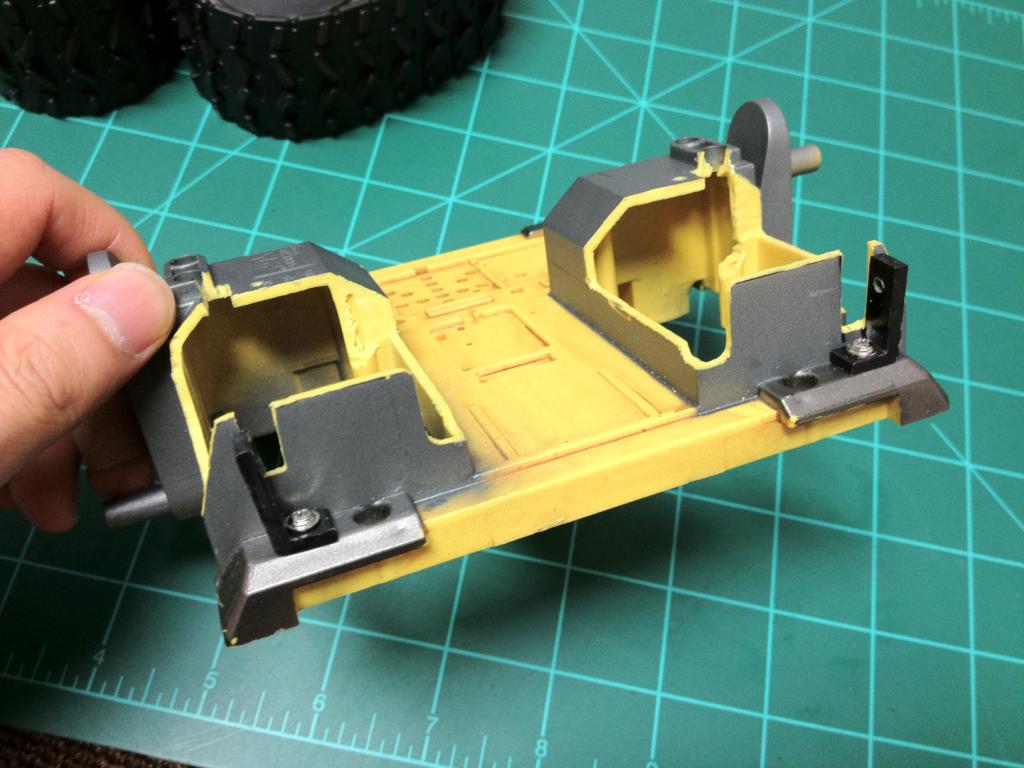
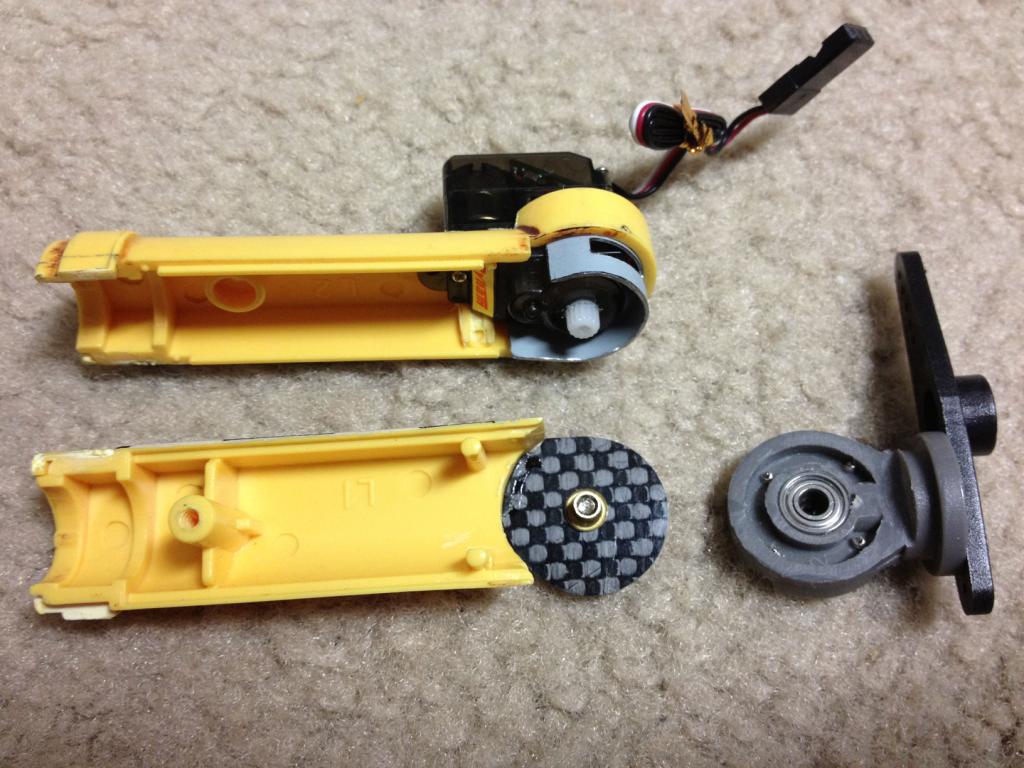
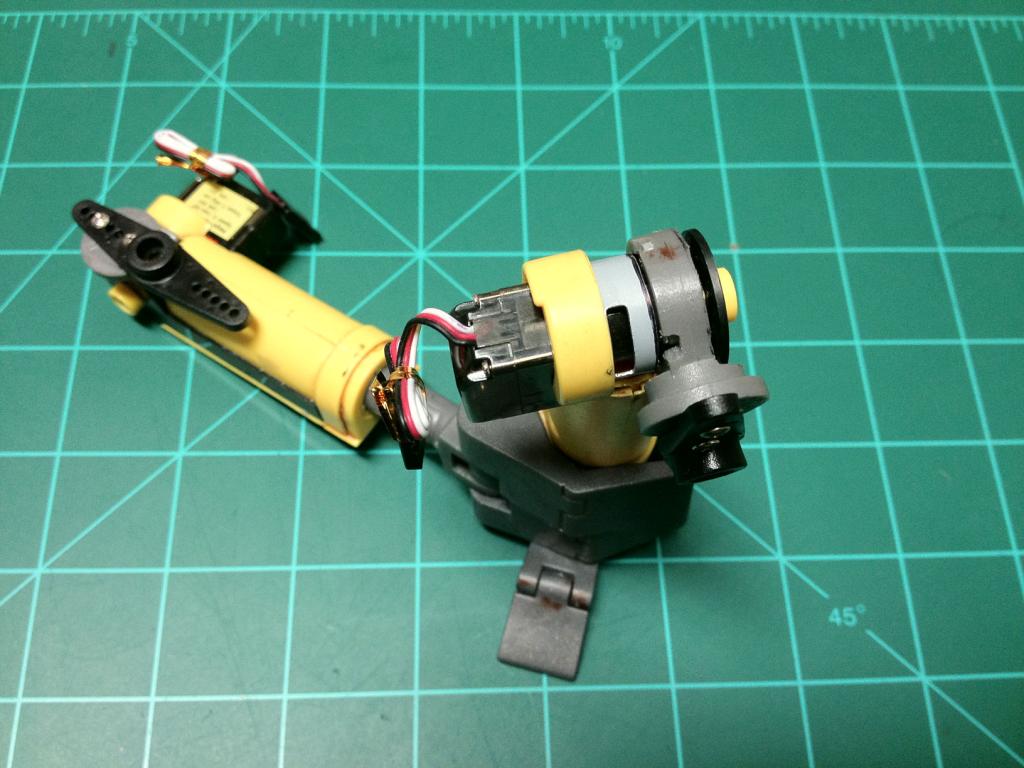
Inspired by DJ Sures and many other Wall-E projects on here, i decided it's time to make my own Wall-E and he will be my first robot build. I wanted him to be as lively as possible. I give credit to Joc's and Glickclik for the geared neck tilt and wheels tilt ideas, i just made it my own using the same concept. I still have yet to fully understand ARC so additional help would be greatly appreciated. Here is what im at so far in the project, some of the parts are hand made from raw Carbon Fiber with only a dremel and i use some parts from a 450 R/C heli as well as bearings in some of the joints.
Done so far:
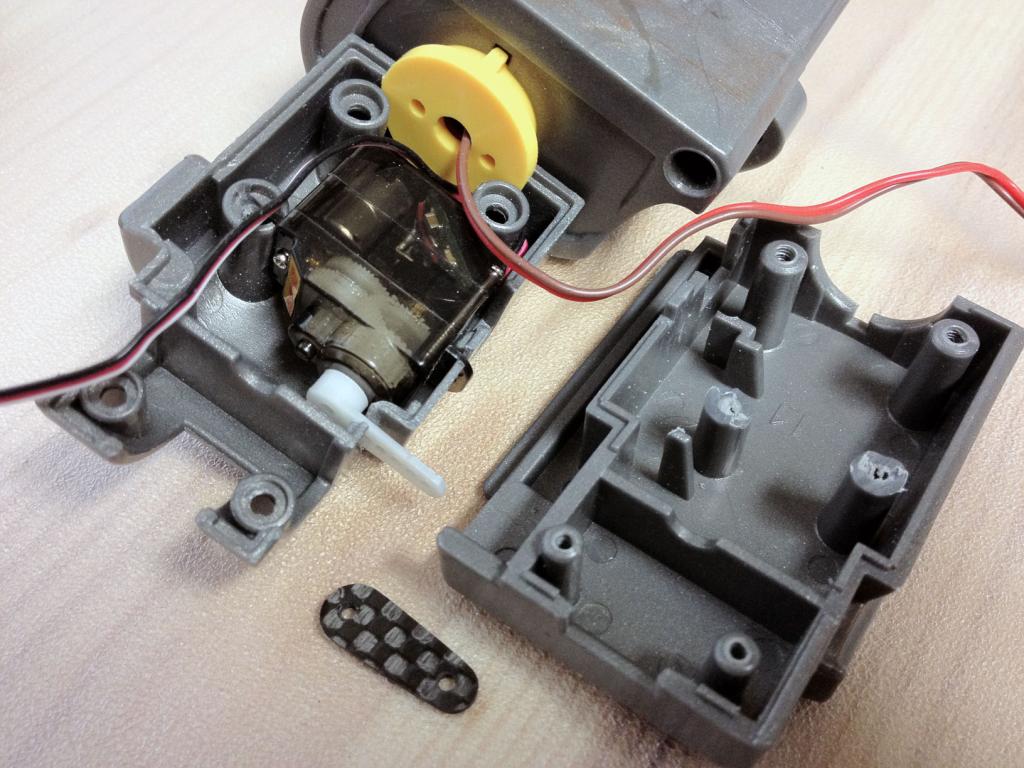
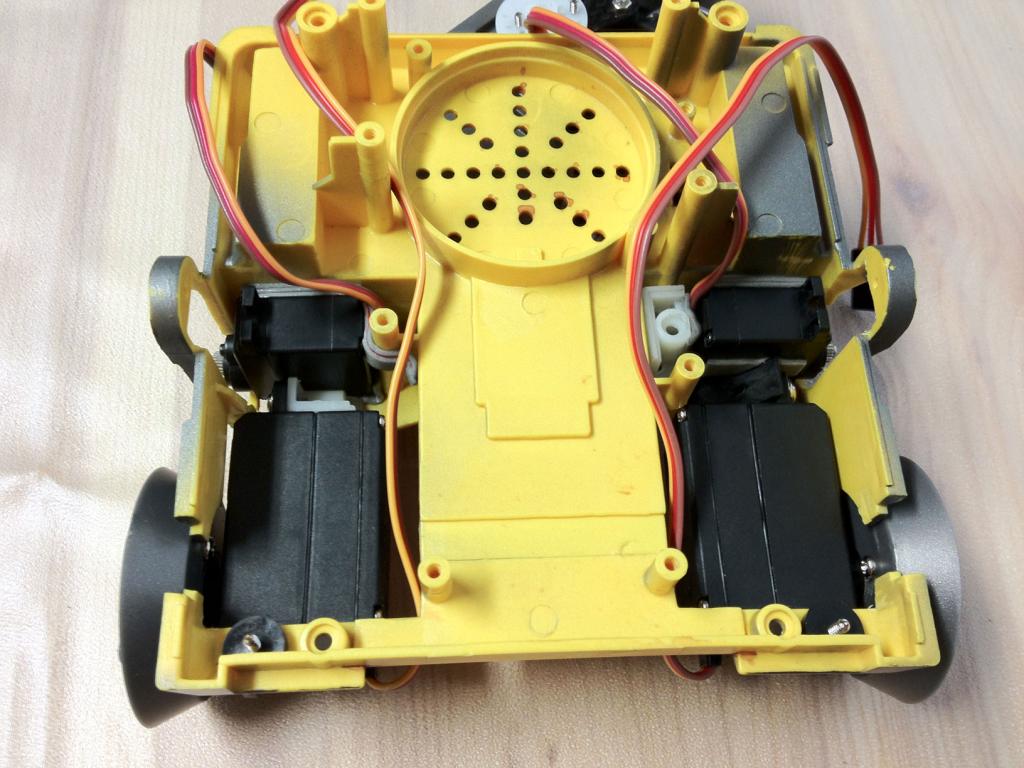
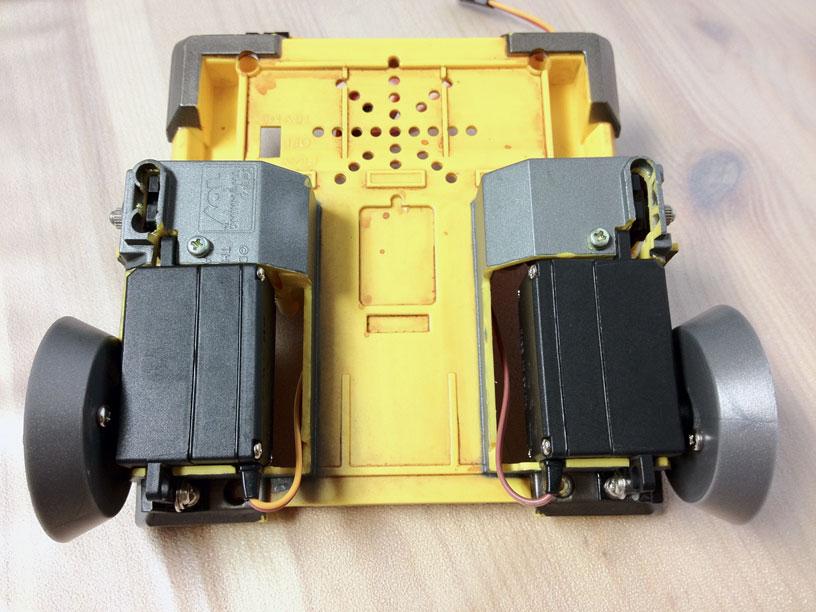
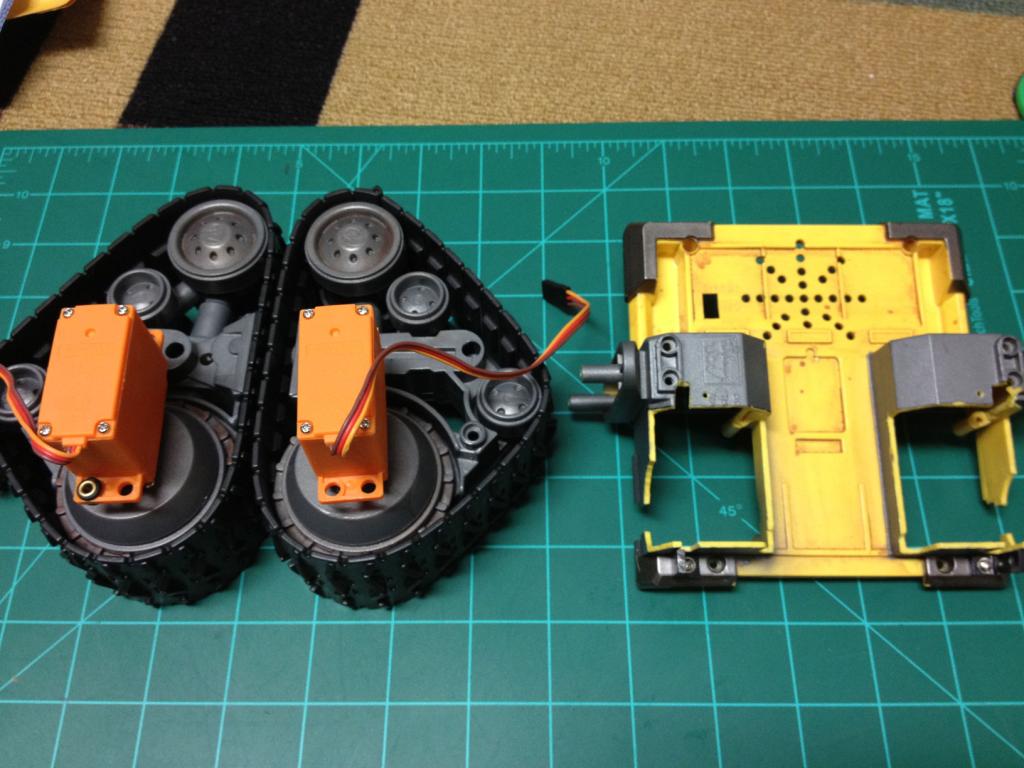
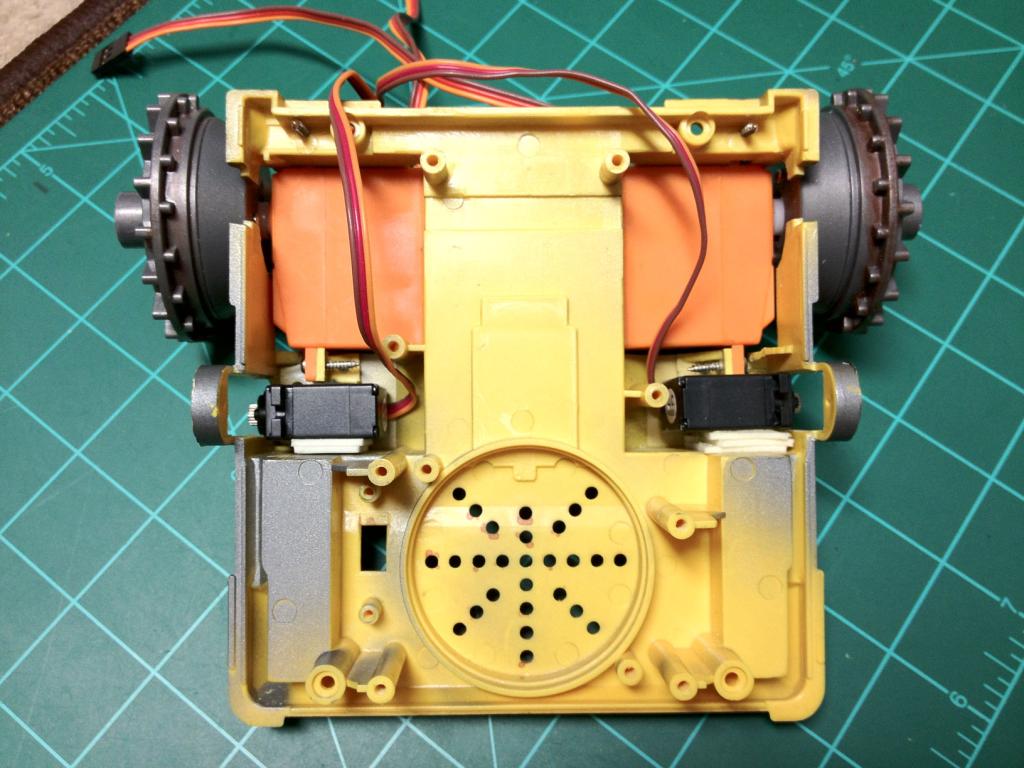
Metal gear high speed modified continuous servos for wheels.
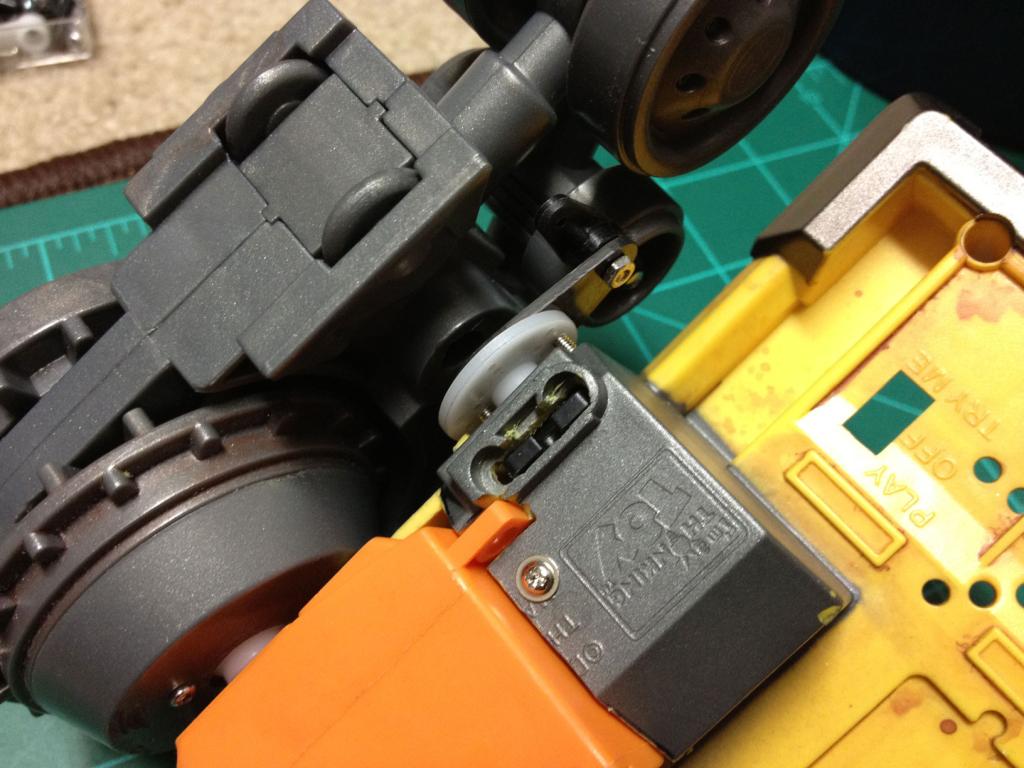
Micro metal gear servos for wheels tilt.
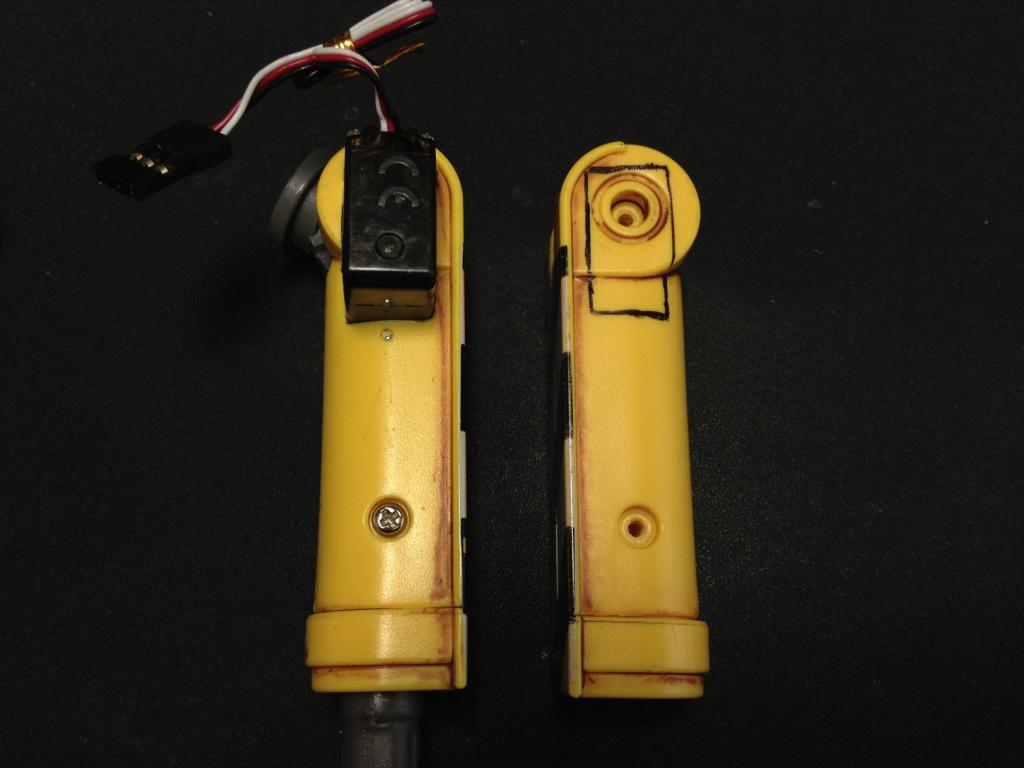
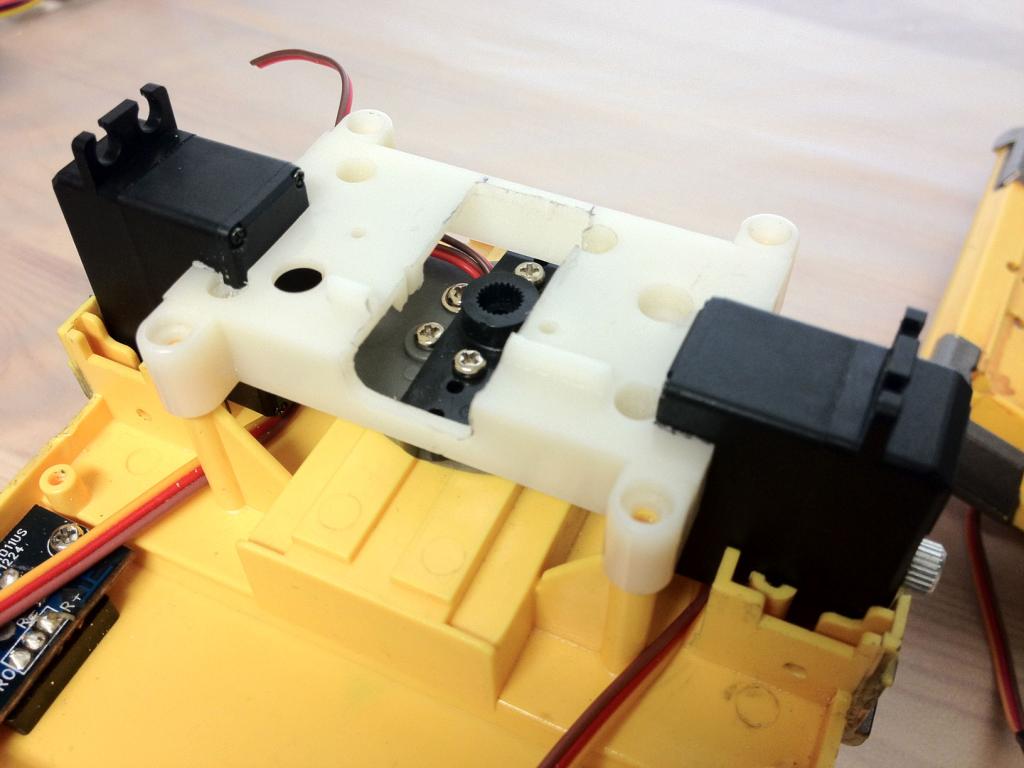
Mini metal gear servos for vertical arms movements.
Micro servos for horizontal arms movement.
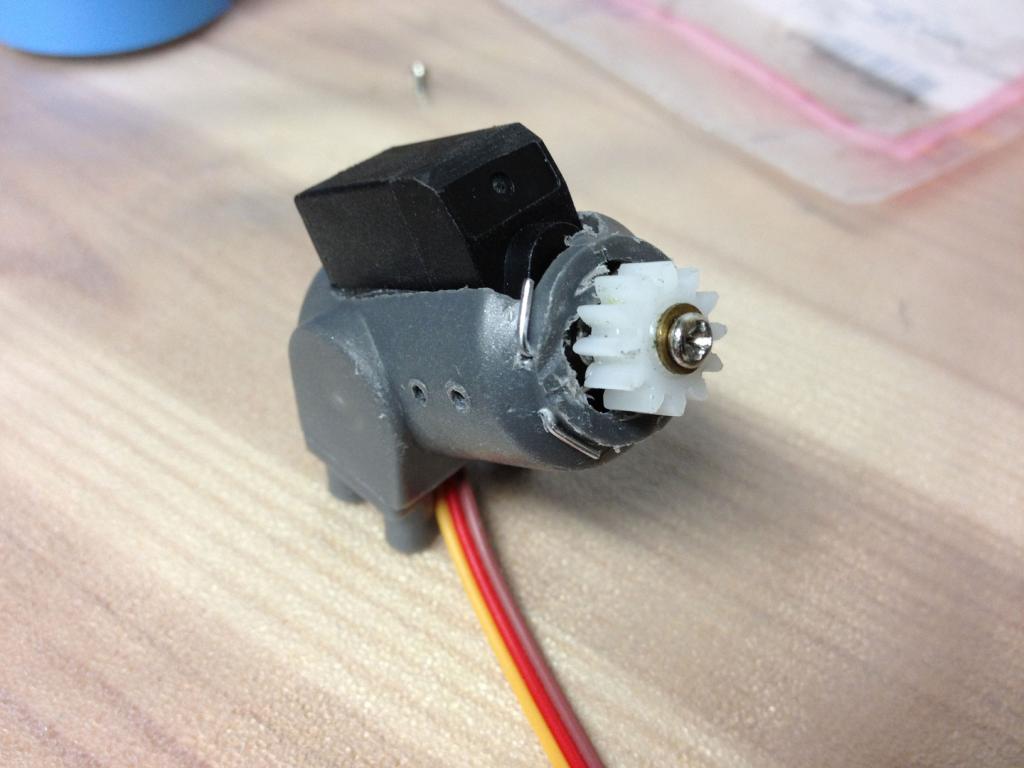
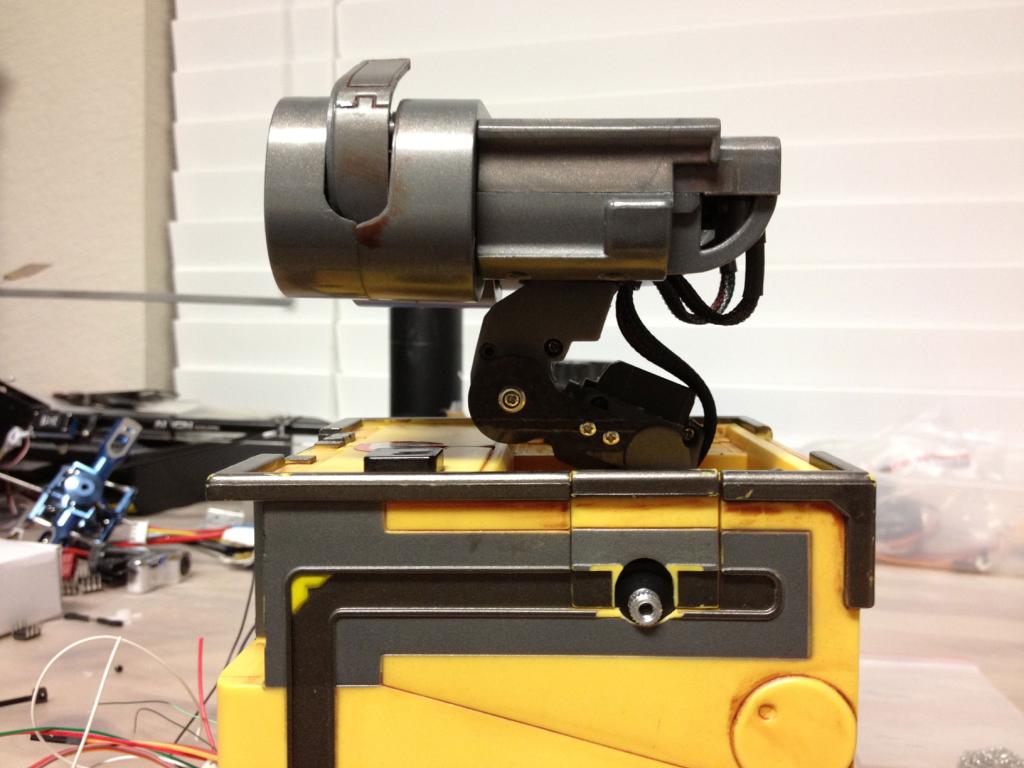
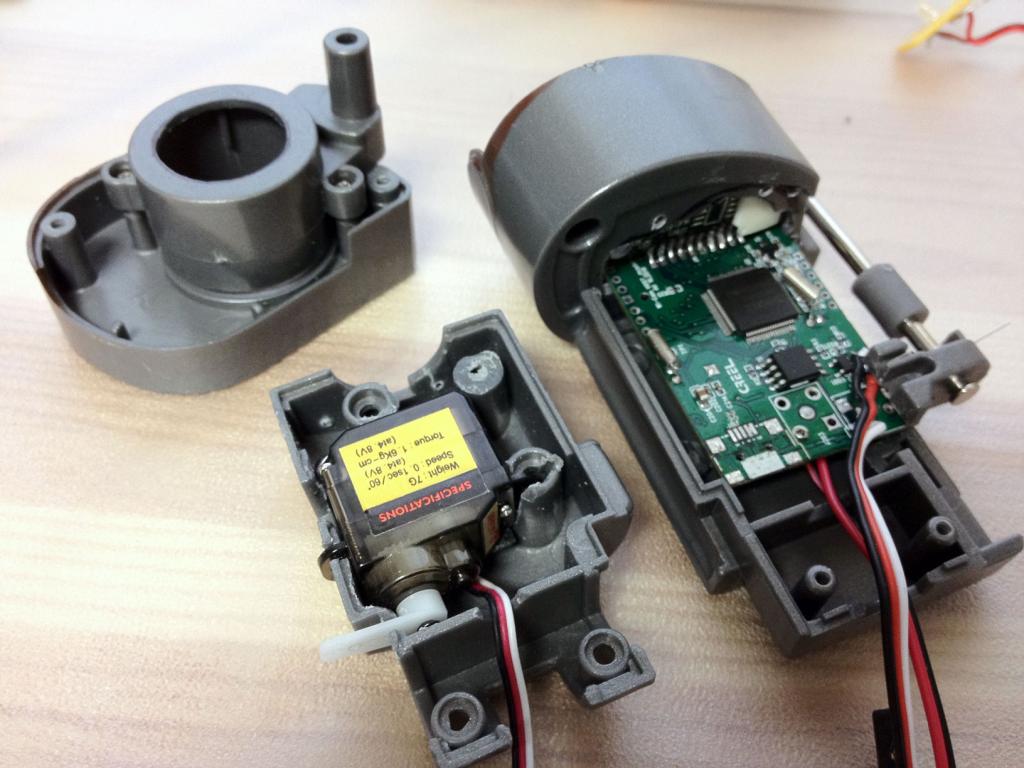
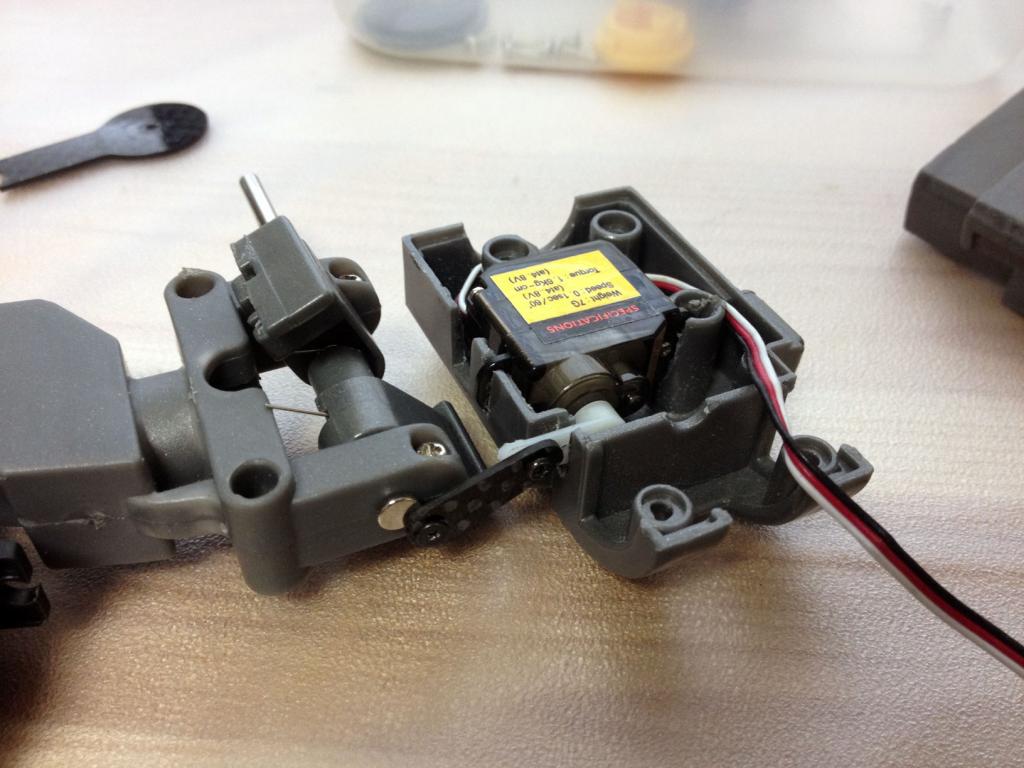
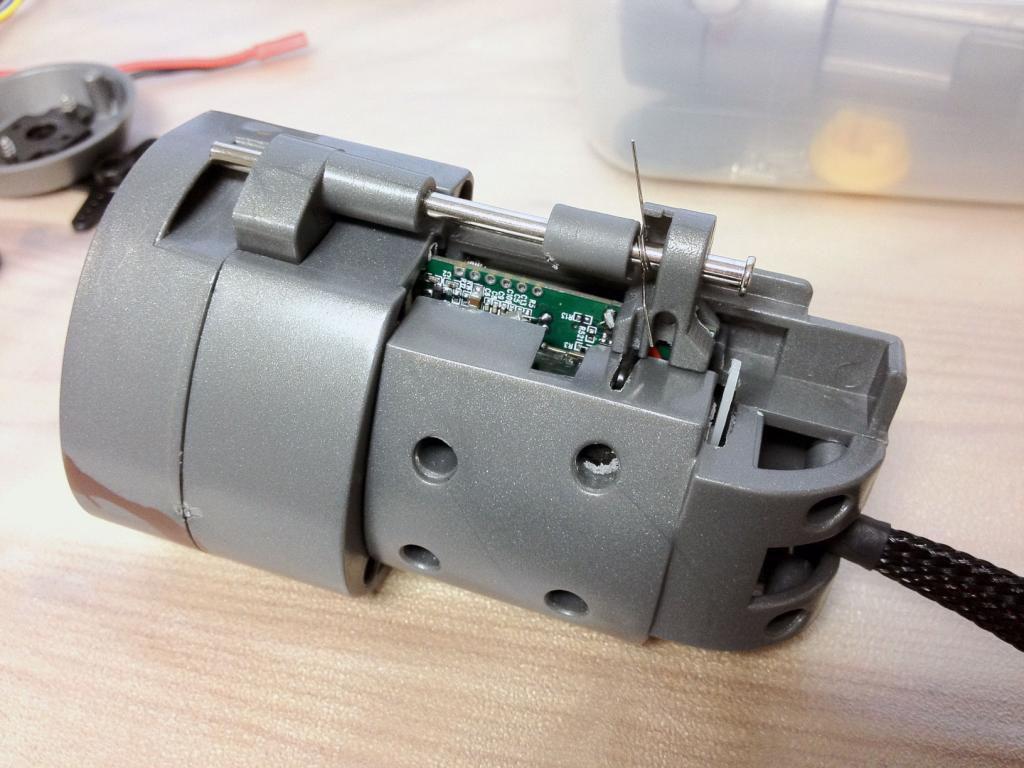
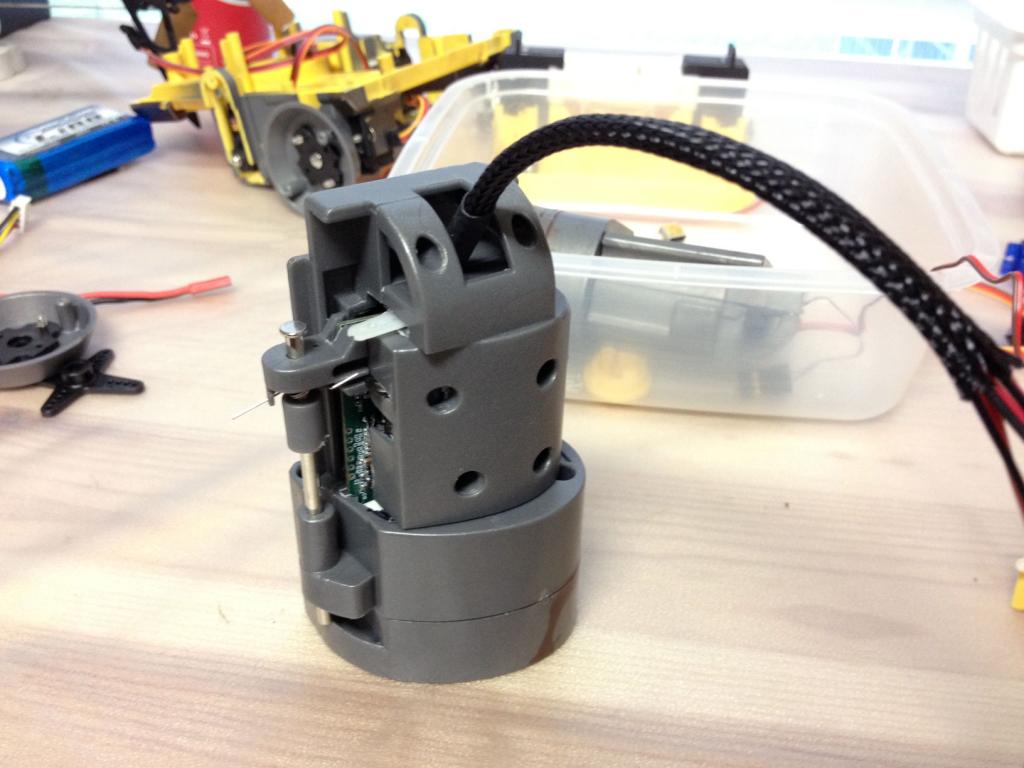
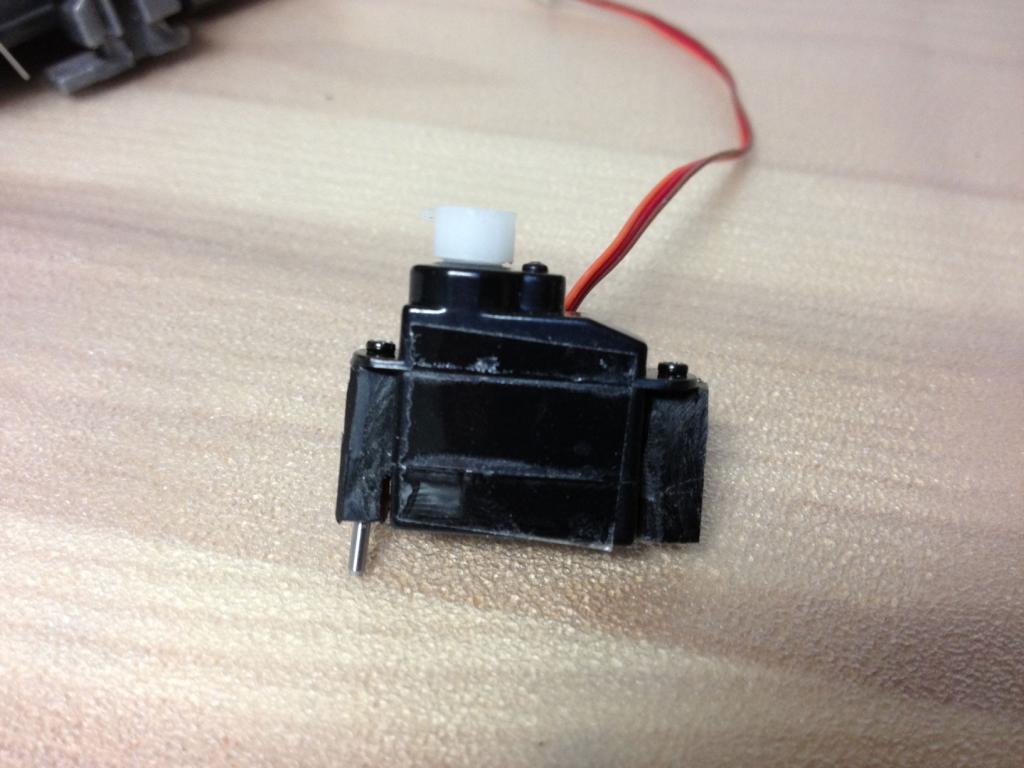
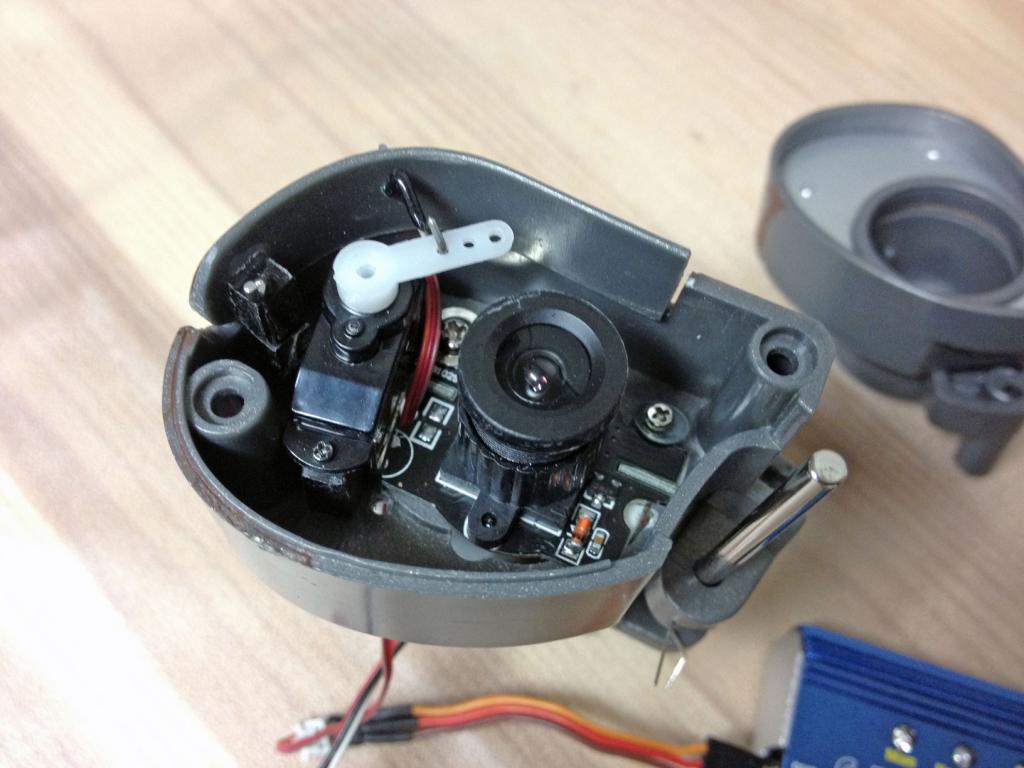
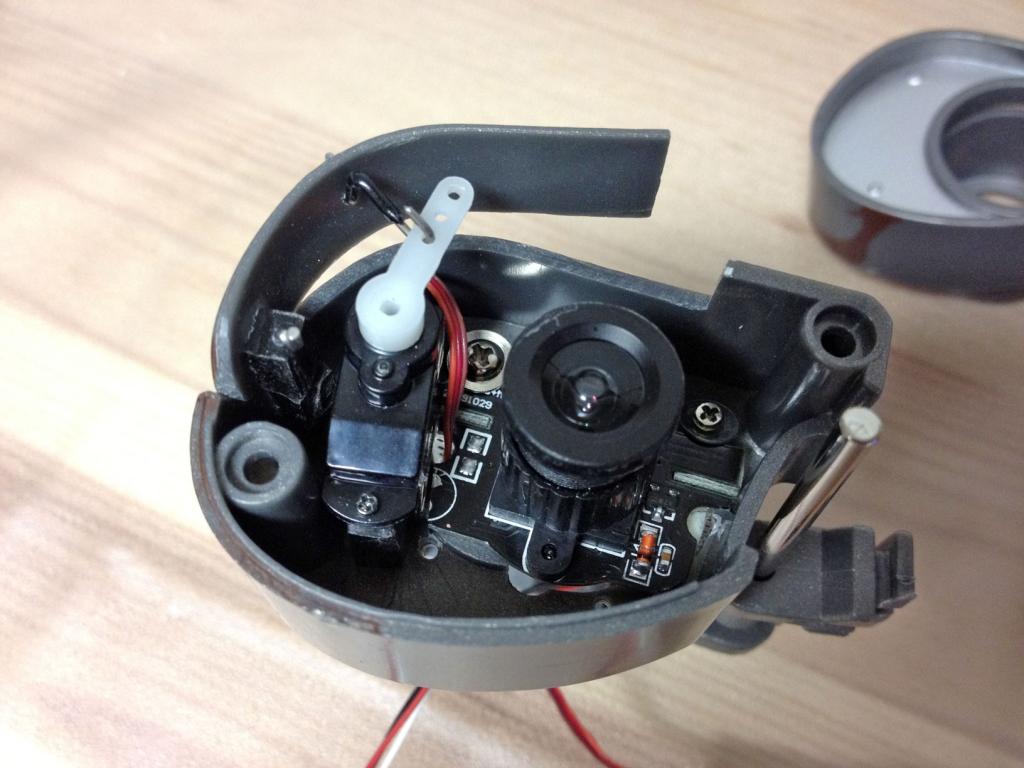
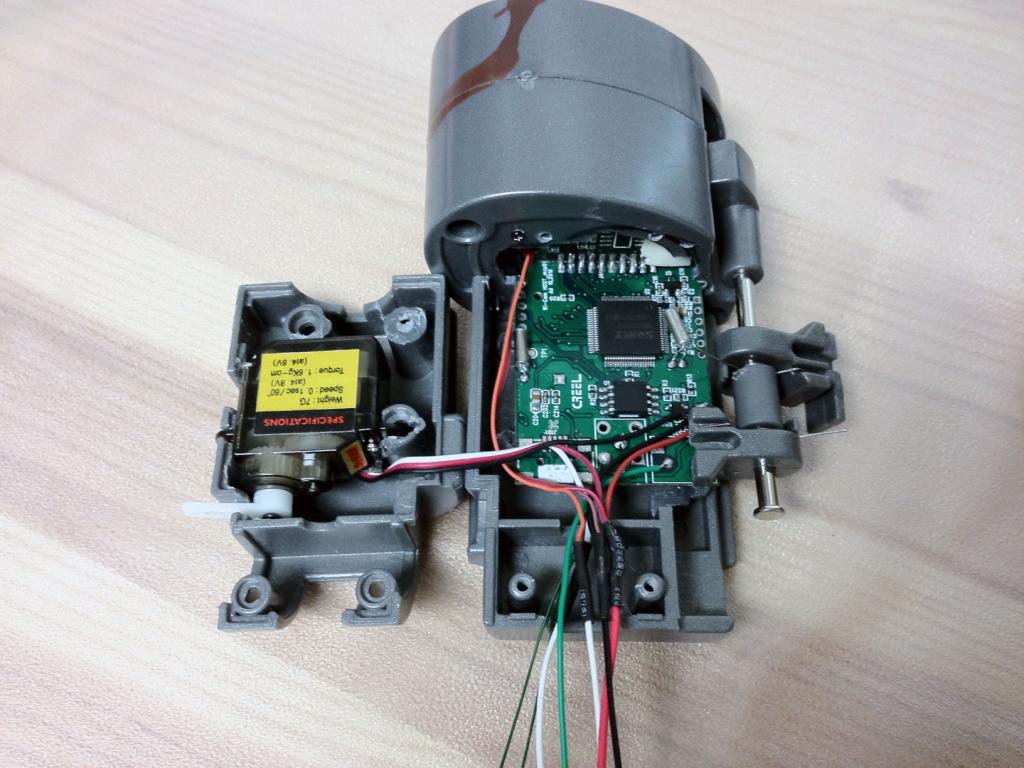
Micro metal gear servo for vertical neck tilt.
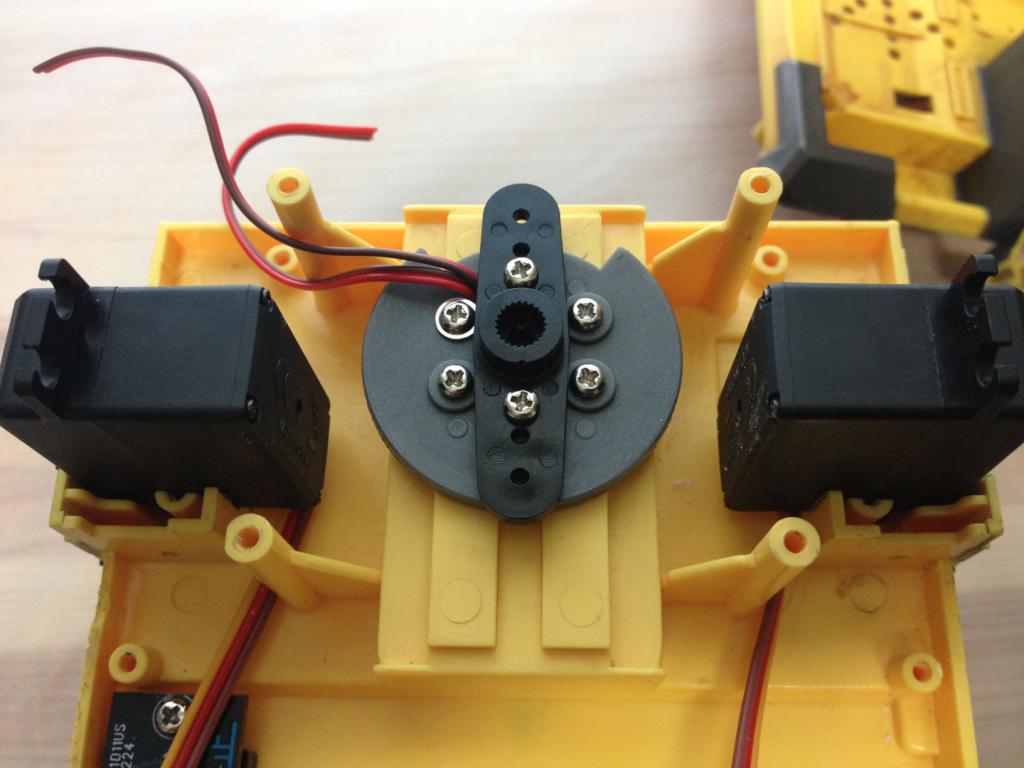
Mini metal gear servo for horizontal neck movements.
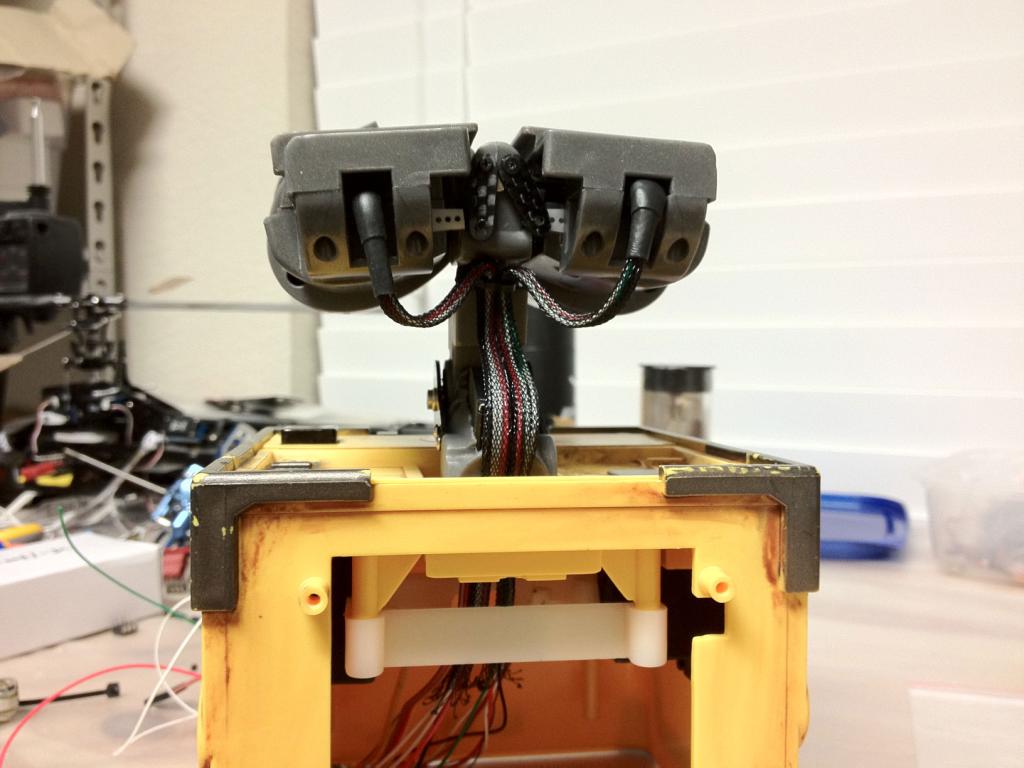
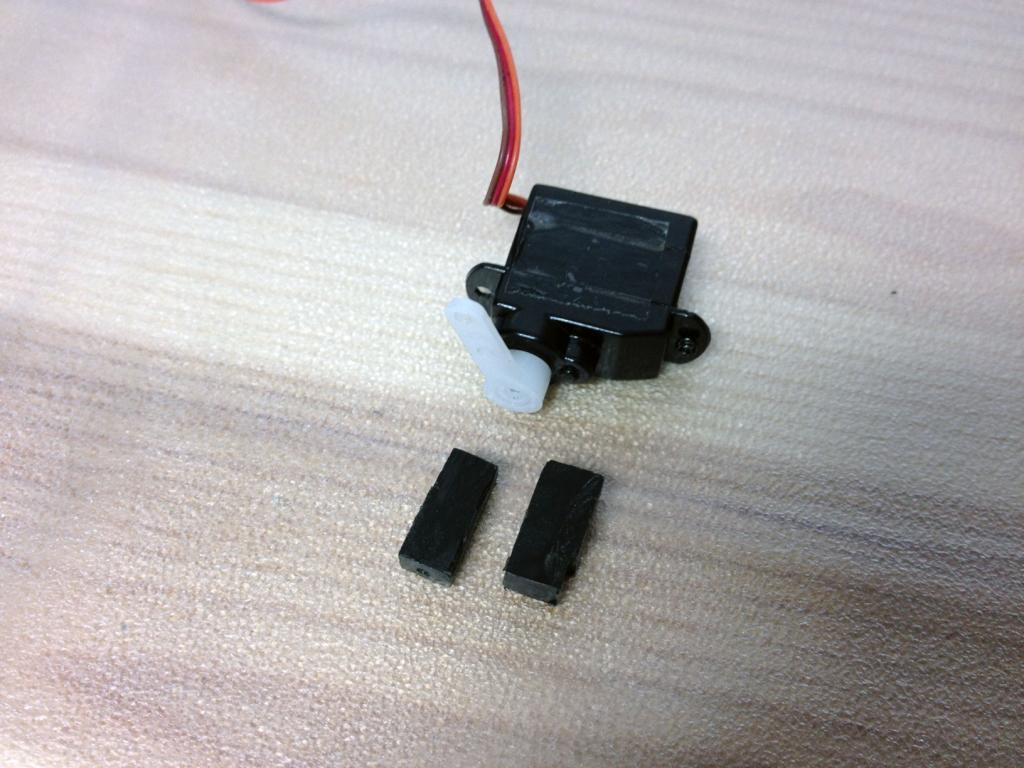
Micro servos for individual eye movement.
Sub-micro servos/mods for eye's lid animation.
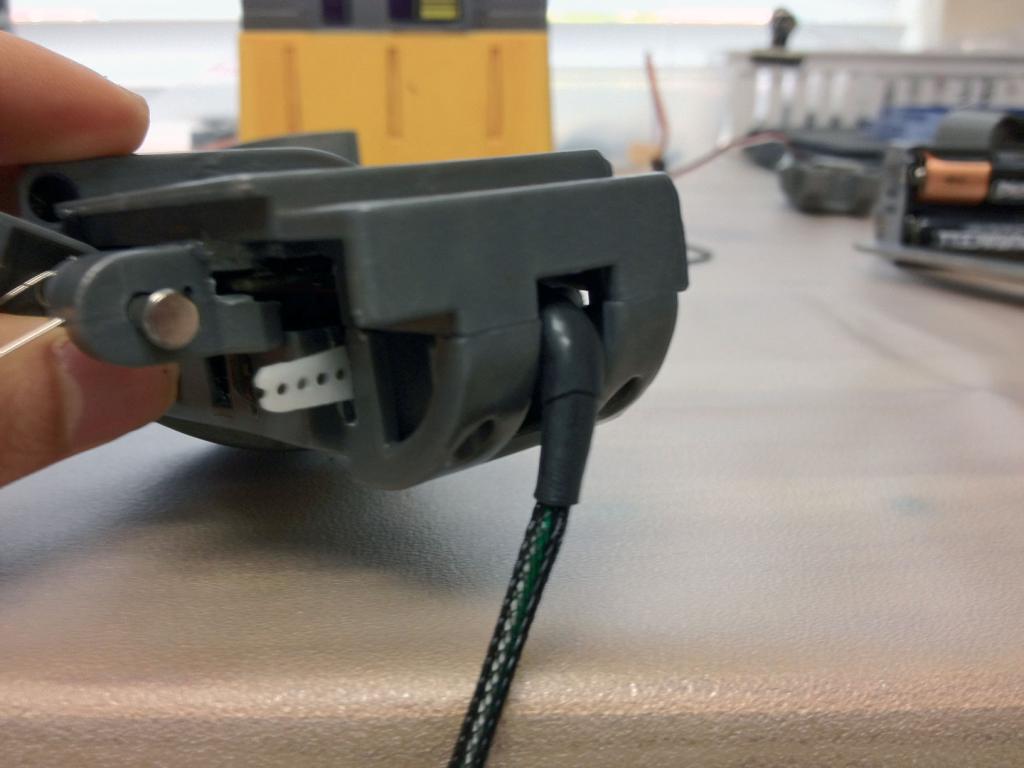
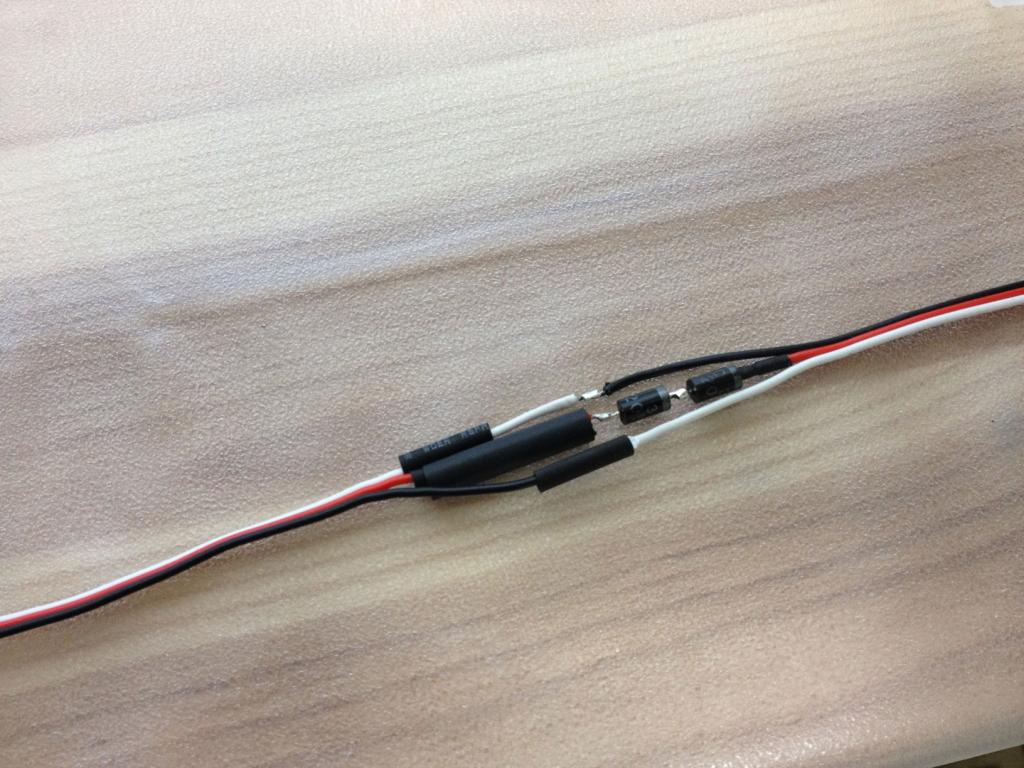
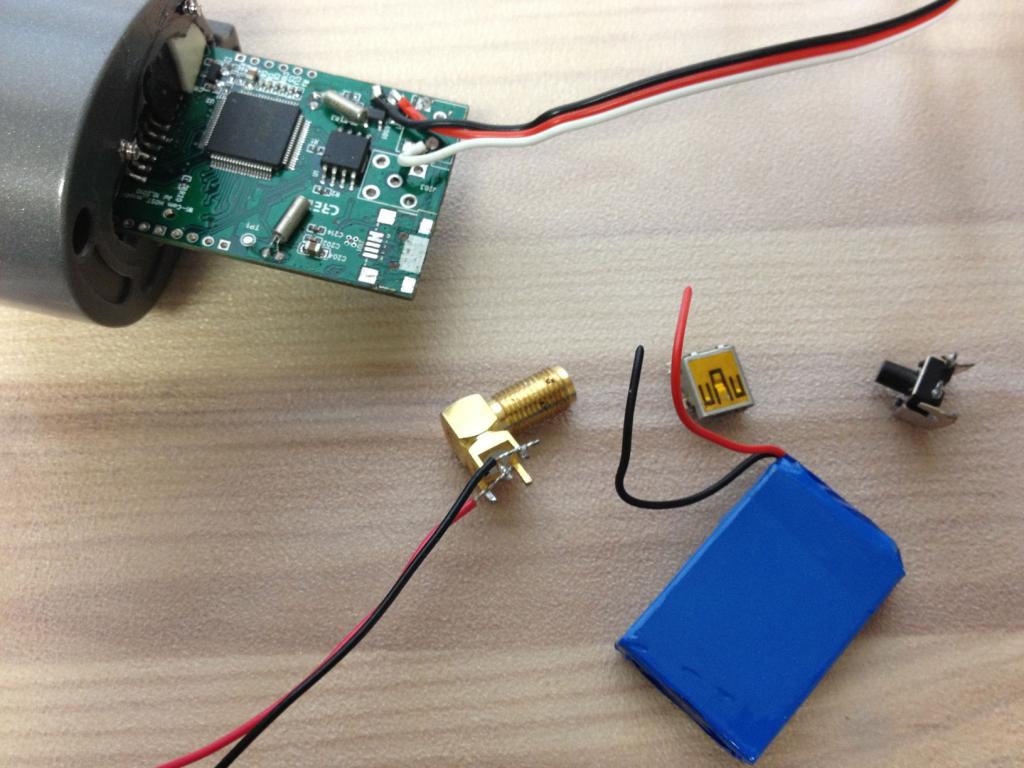
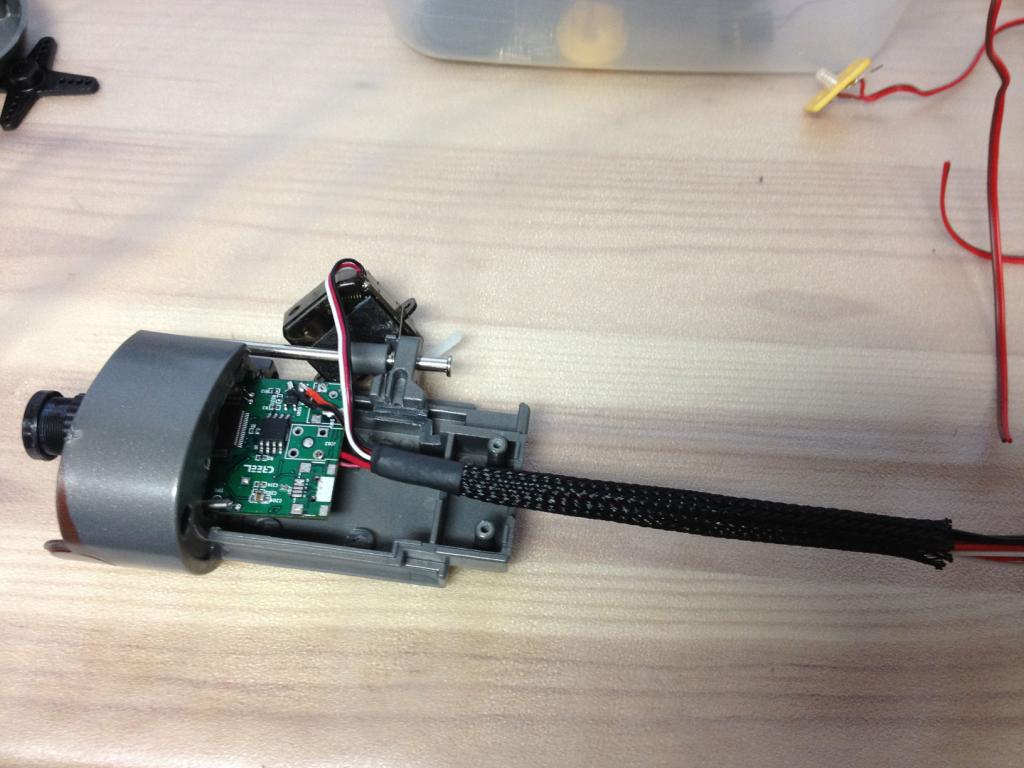
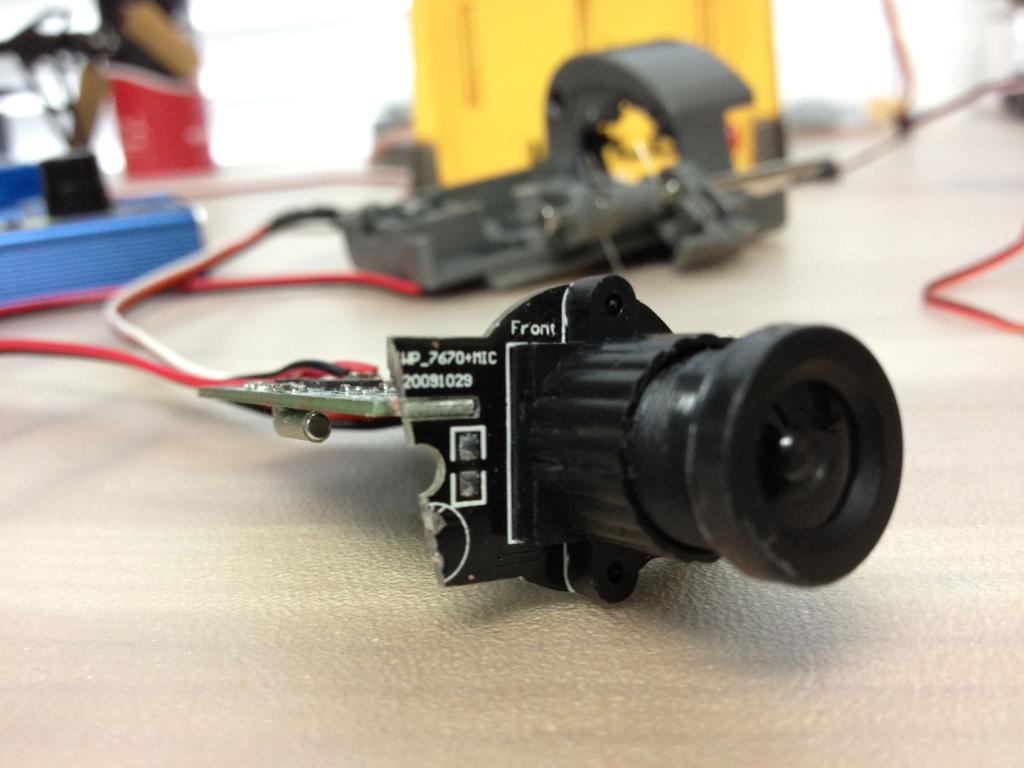
Get rid of dummy cables in the head, run all servos/camera wires from head down the same way and use heat shrink/black nylon mesh for realistic look.
Red laser between eyes.
Mock up left eye's lens.
Other things to be added/changed as i go
Yet to be done:
Light up solar panel (most likely, still thinking) Red LED in front in the black spot next to the solar panel (definitely) Make his wrist rotate (don't know yet, still thinking)












Discover more robots

Ezang's New Creation - Mr. Roman 2 Video

Leversofpower's Cutting My Teeth. The Floor Crawler


Nice!
It there a reason no one uses the motors that come in the wall-e with a h bridge ?
@bret.tallent Thanks
@Algeraist You can but there is only 1 motor, you will need two motors to control the wheel individually for turning in place, easiest way is using two servos for simplicity. Those wheel servos will be replaced with high speed/high voltage metal gear later to make him move a lot faster.
Wow I like how you got the neck gear to work! I cant wait to see this guy running around!
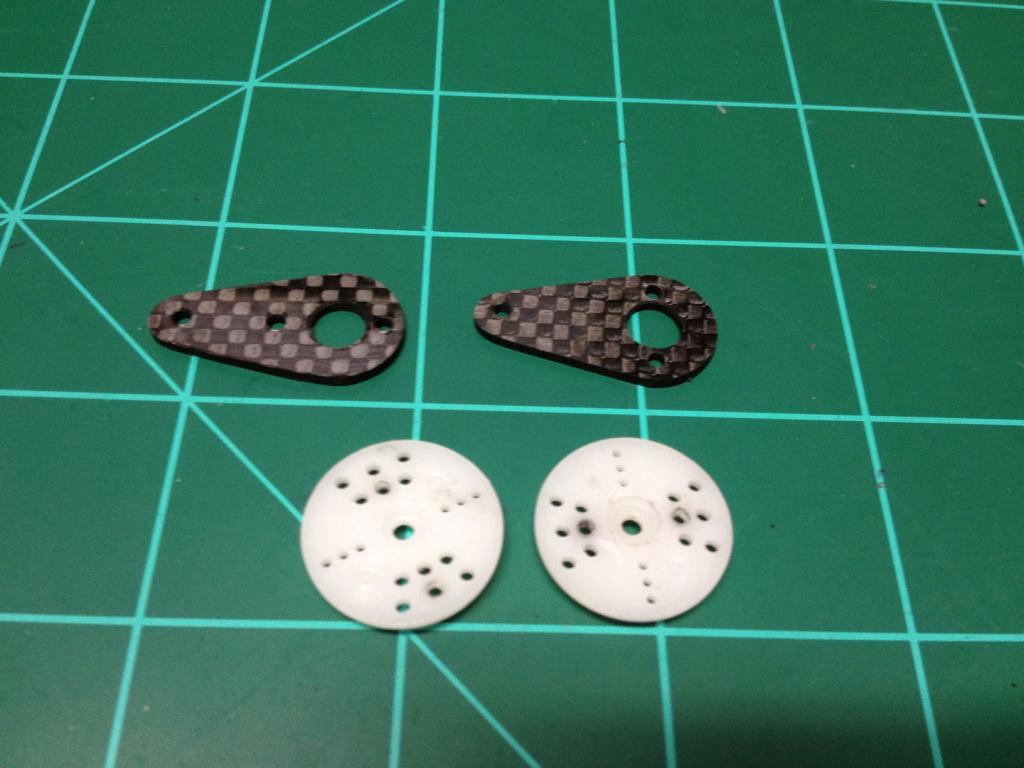
Thanks - Love the neck you have done a good job of cutting the carbon fibre it looks laser cut from the photo's.
Can't wait to see more updates on this.
My wall-e is in the post hopefully arriving soon.
@Glickclik
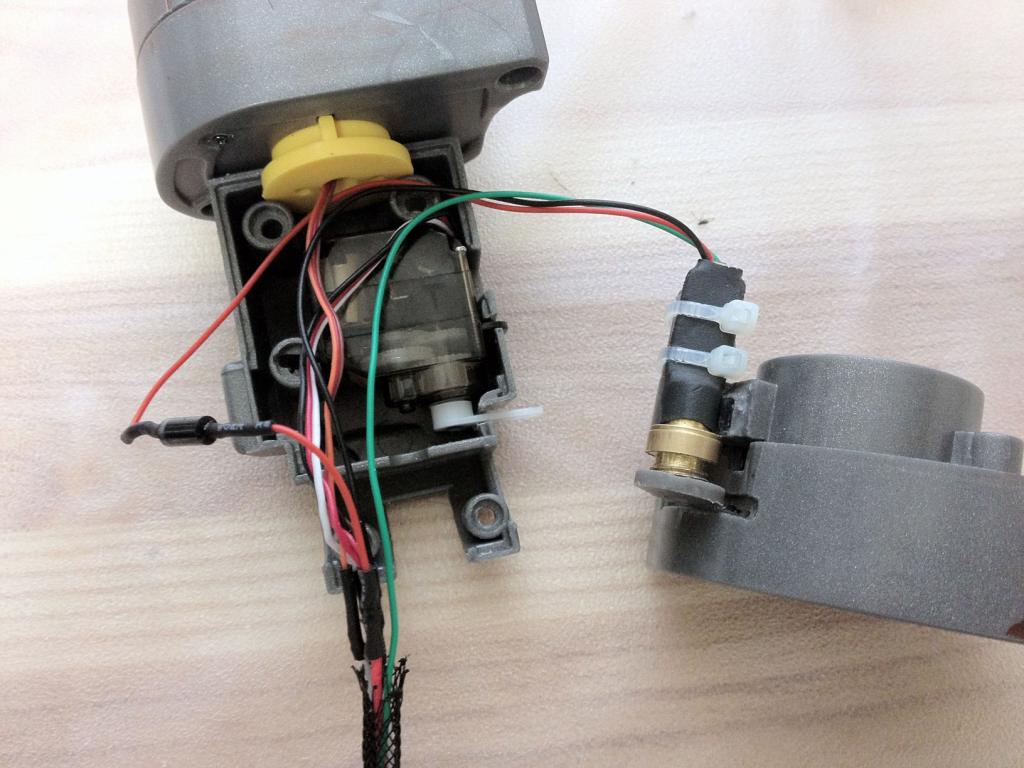
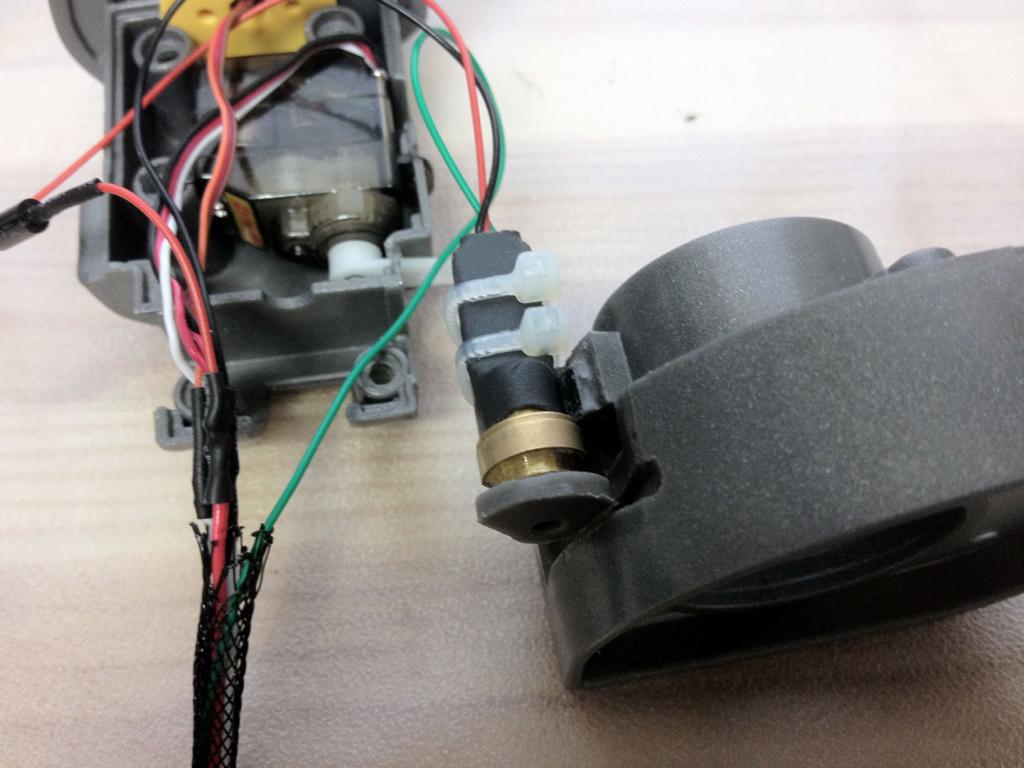
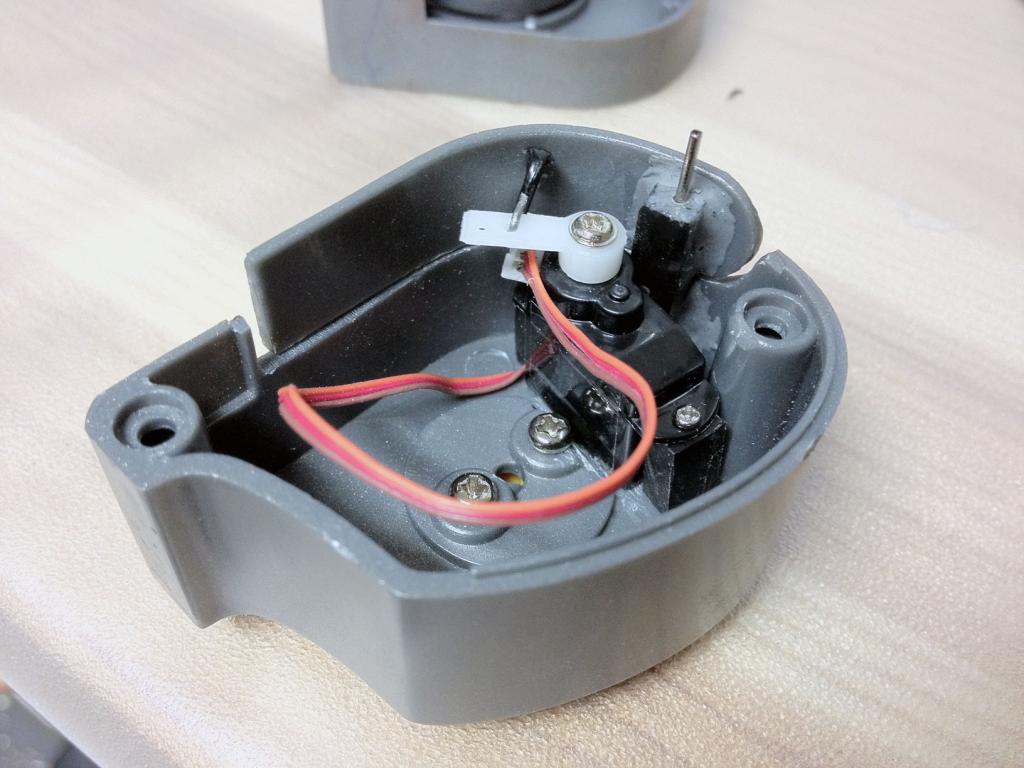
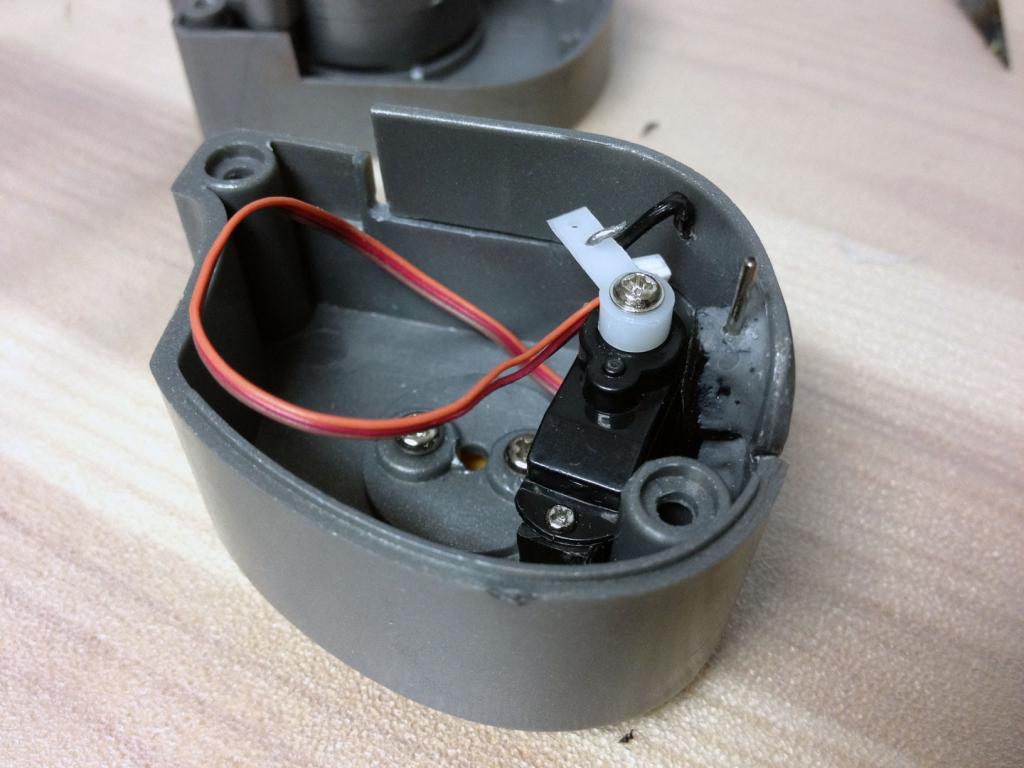
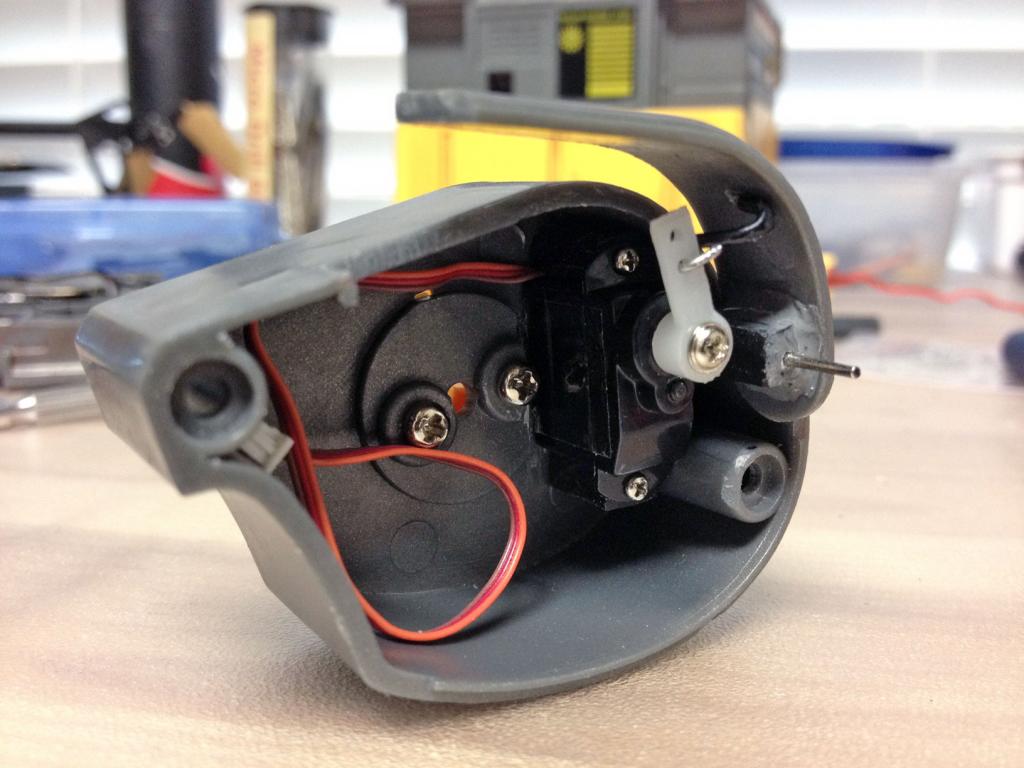
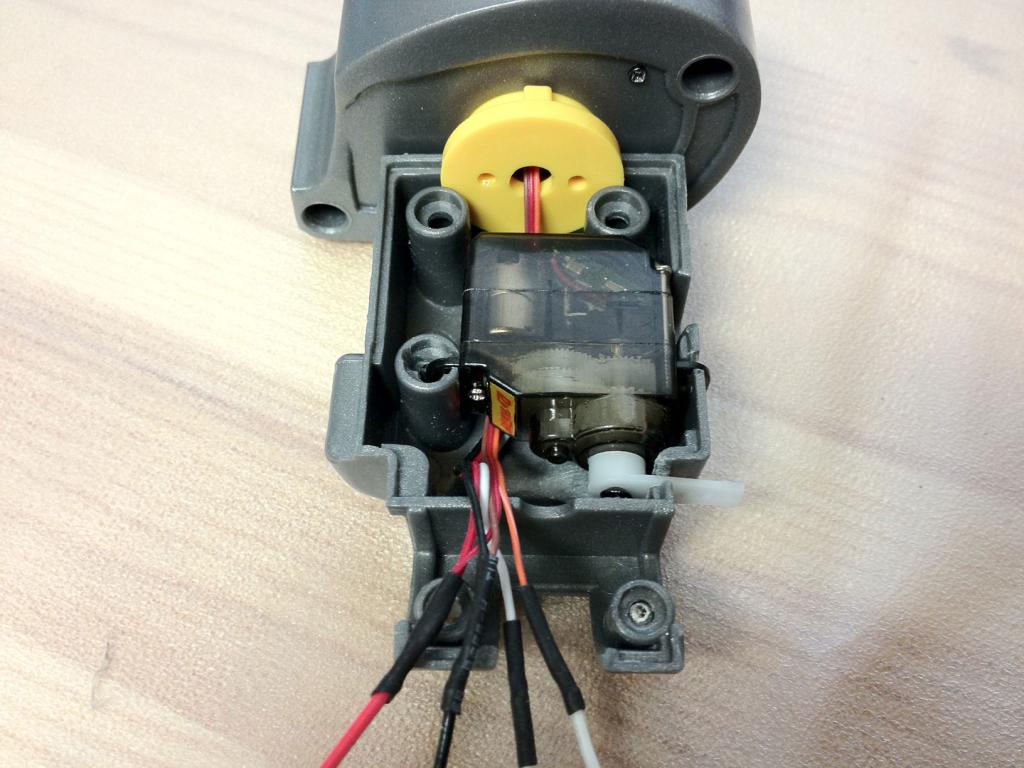
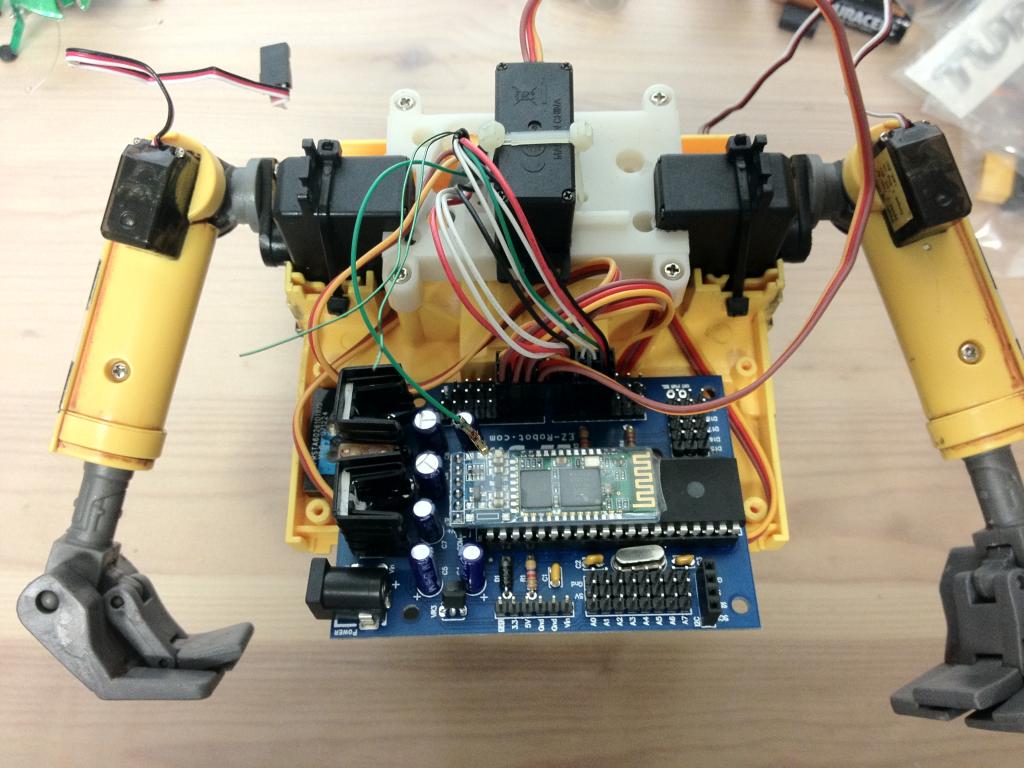
Thanks...I got the idea from Joc's wall-e but i used the bigger gears that was in gear box inside wall-e, not the gears in the neck itself, it's too small and flimsy. I mounted the servo that way because it would give Wall-E more natural look and room to tilt backward. Today i just added two bearings inside the shaft where it rotate making double bearings on each side of the gear for better support, without these bearings inside it would bind once the screws are tighten. Right now im testing all the movement with a servo tester, can't wait to put him back together, still long way to go but im enjoying all the thinking and fiddling, it is all about trial and error
but im enjoying all the thinking and fiddling, it is all about trial and error
@Algeraist
Thanks...i wish i have access to a cnc or laser machine, all the parts are actually cut by hand with just a dremel. I made the part out of paper business card first and use it as template for the real part, there was error in the cut i had to redone one of the part from scratch. Can't wait to see how yours will turn out, everyone has different thinking
As time goes on all of our robot hacks/mods are getting better and better!
@Glickclik You bet, i didn't know anything about making robot and yet here I am, learning as I go. How is your Wall-E by the way? did you finish him yet?