























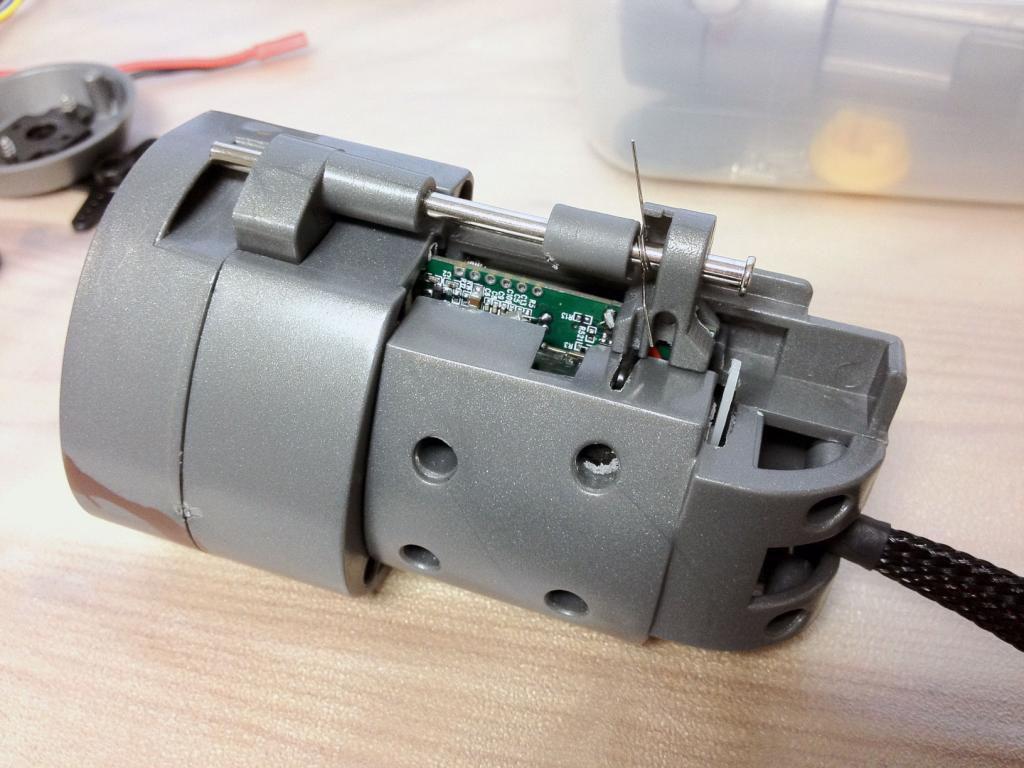
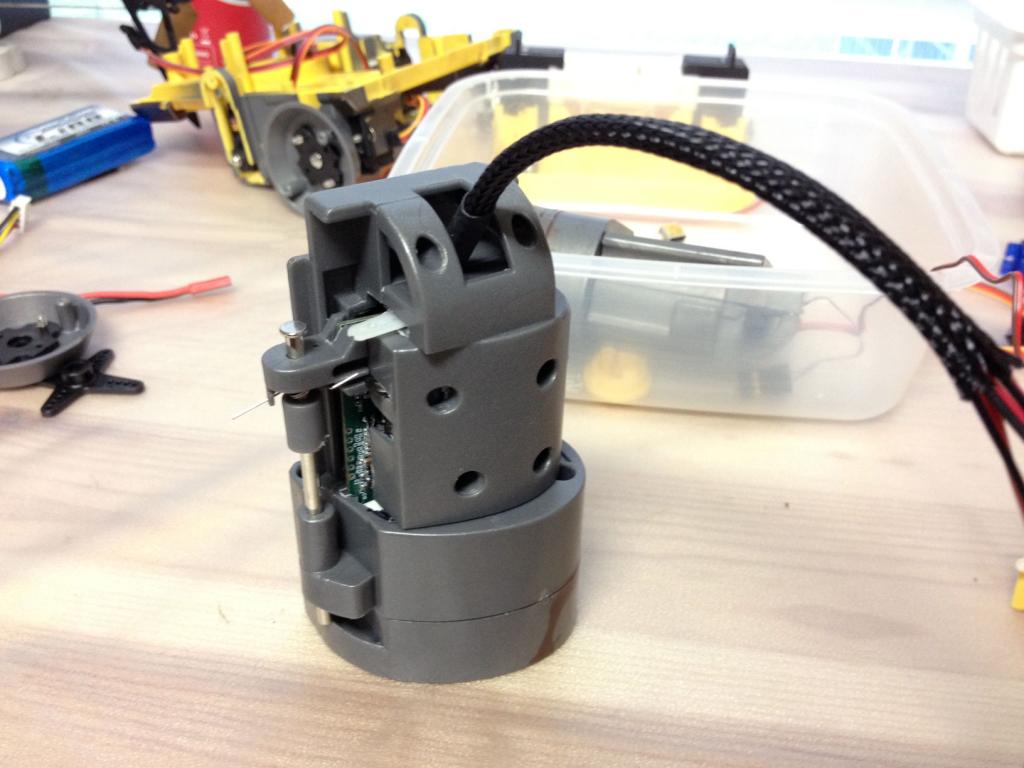





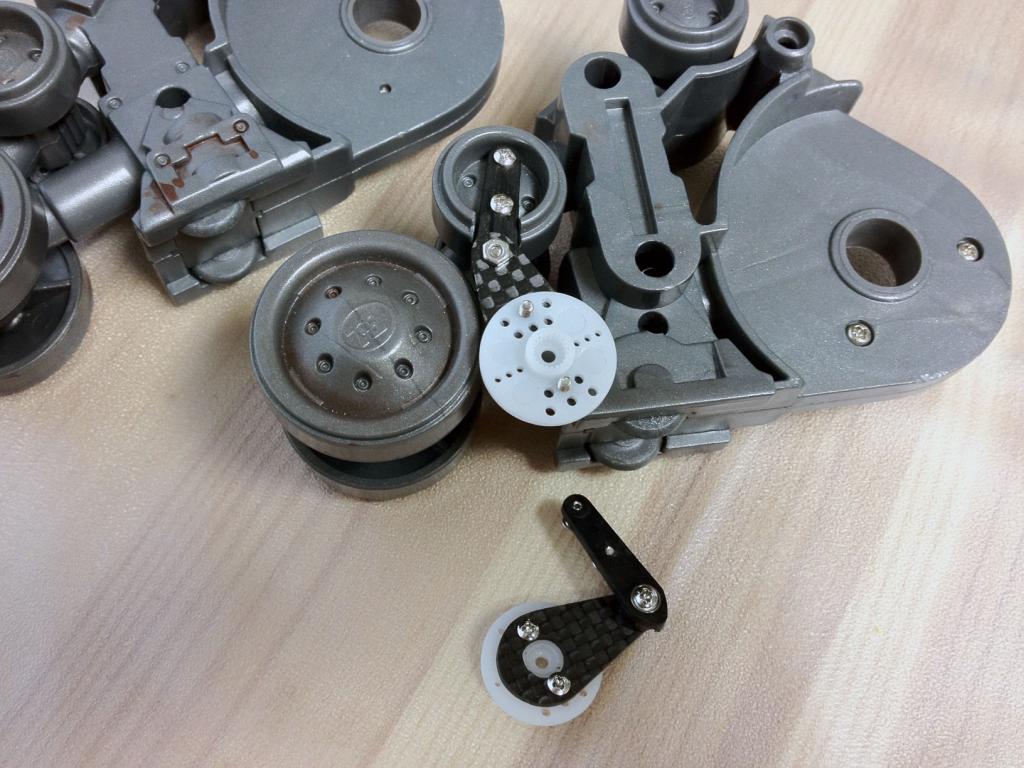




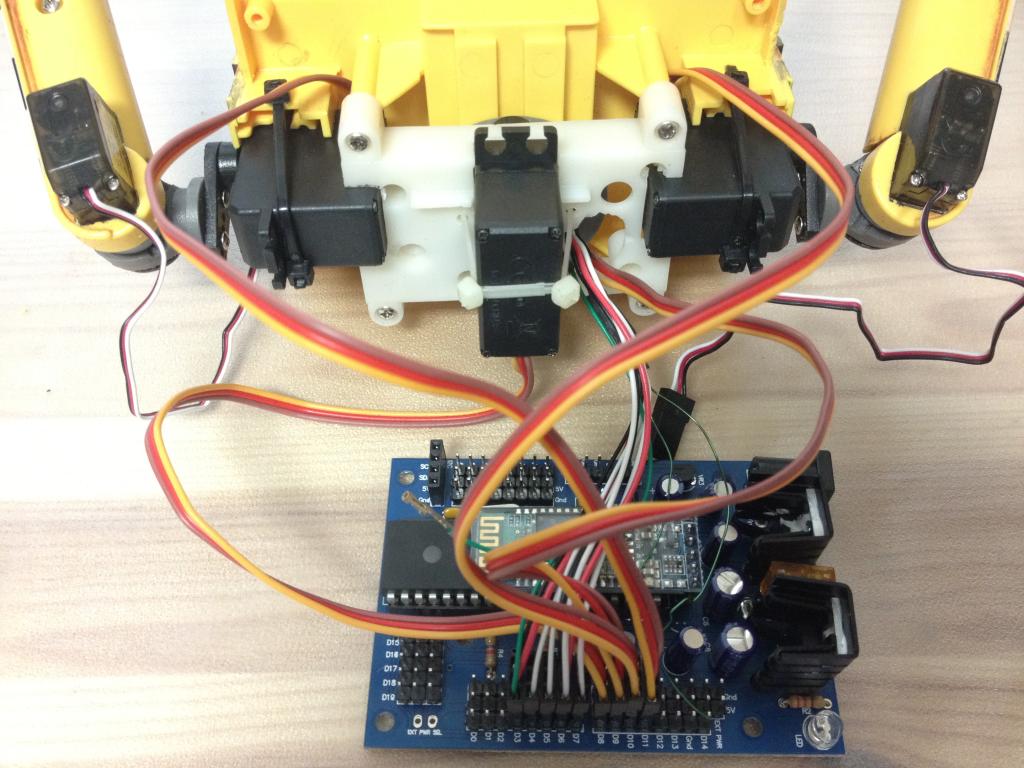
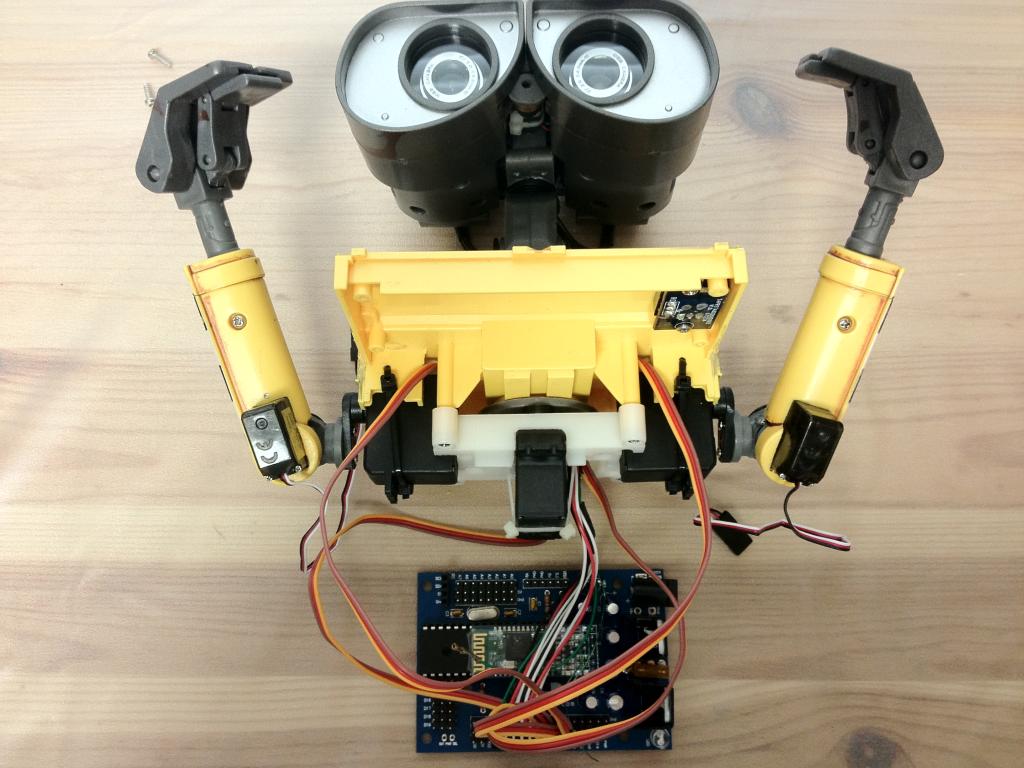
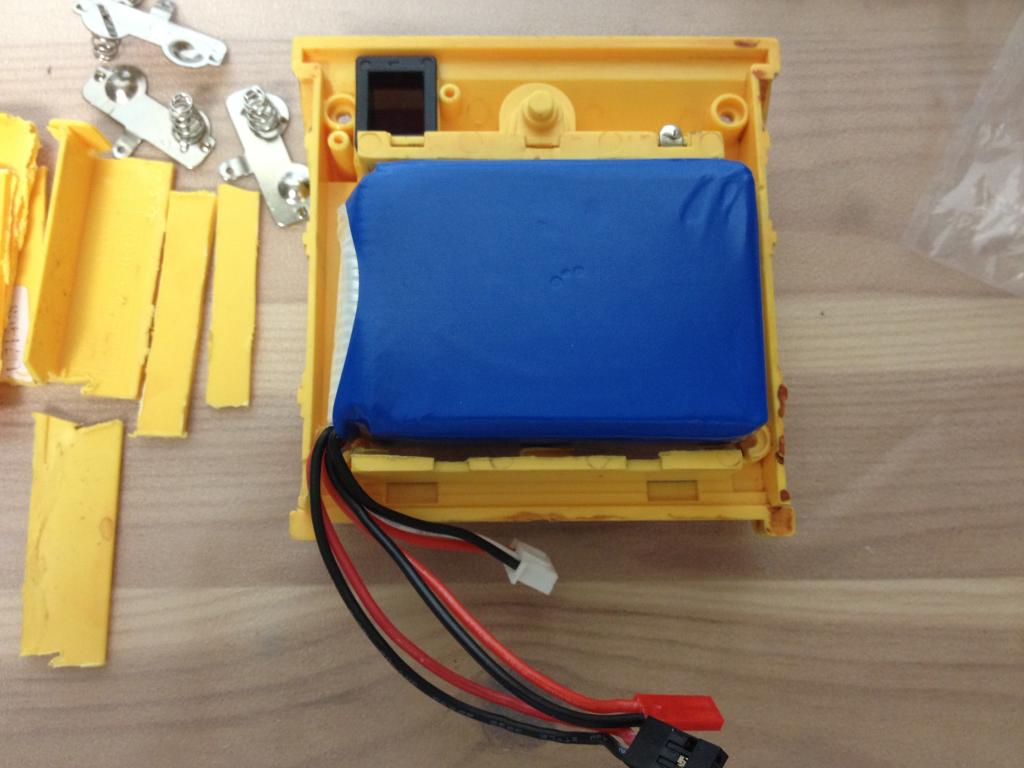
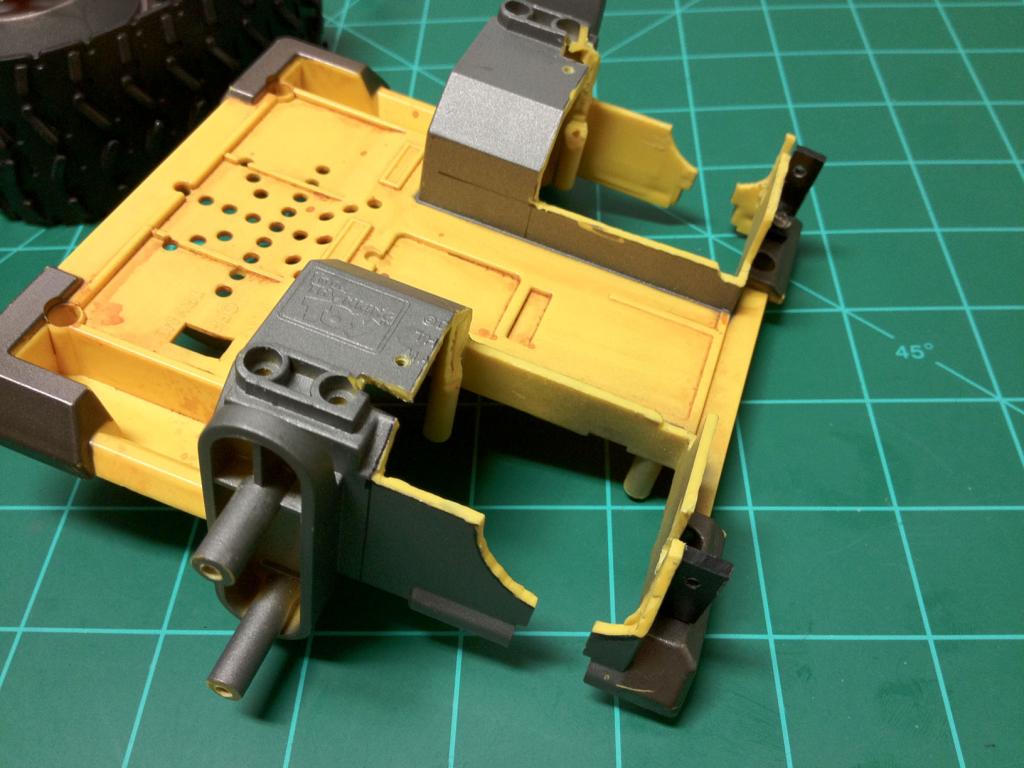
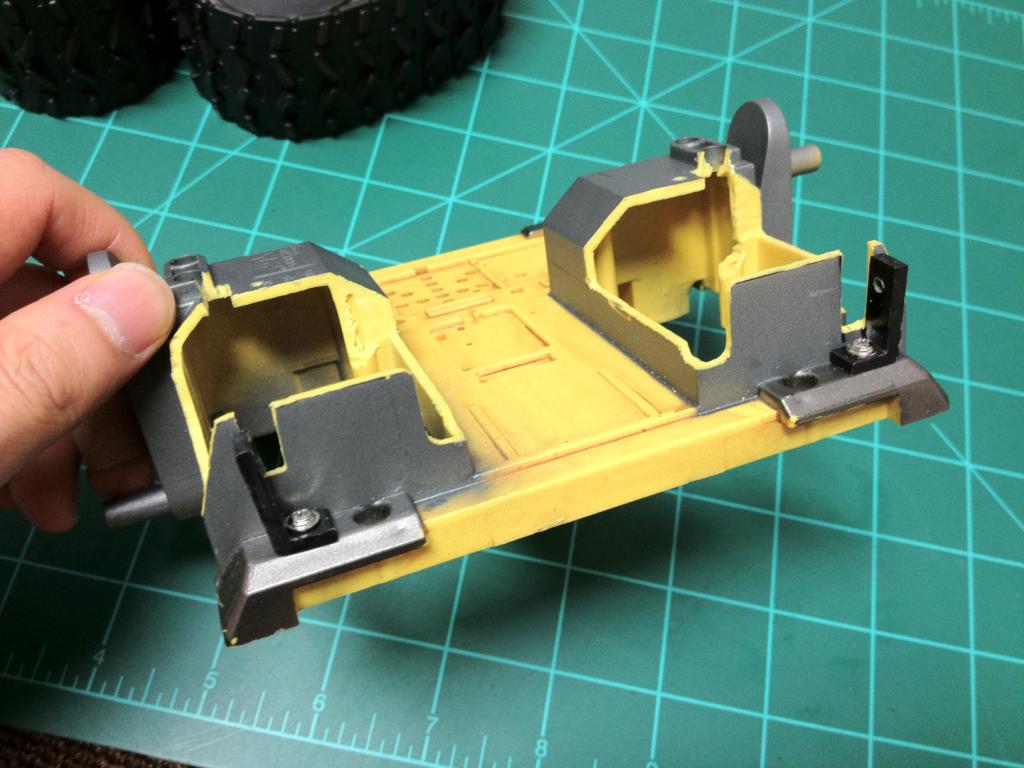
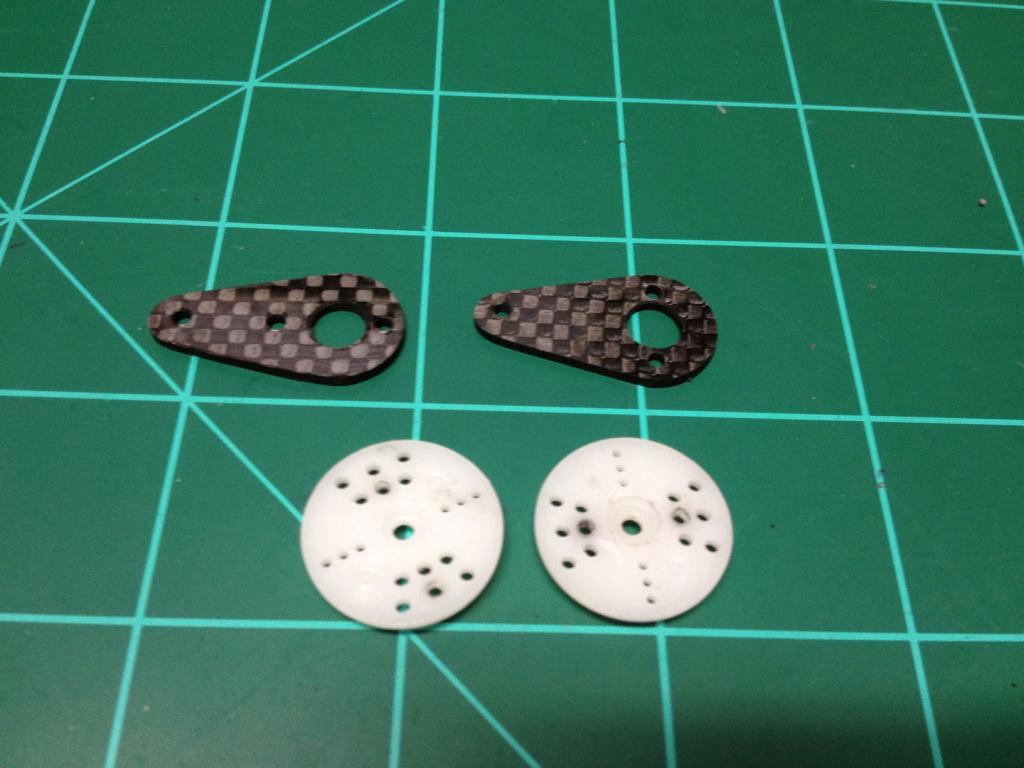
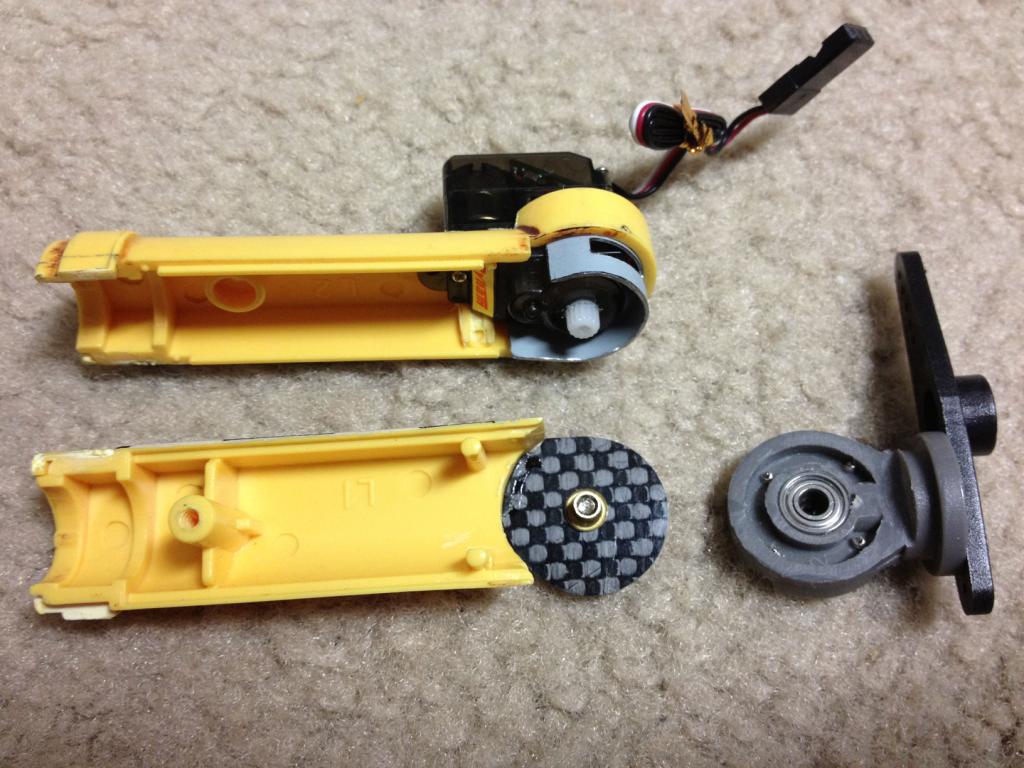
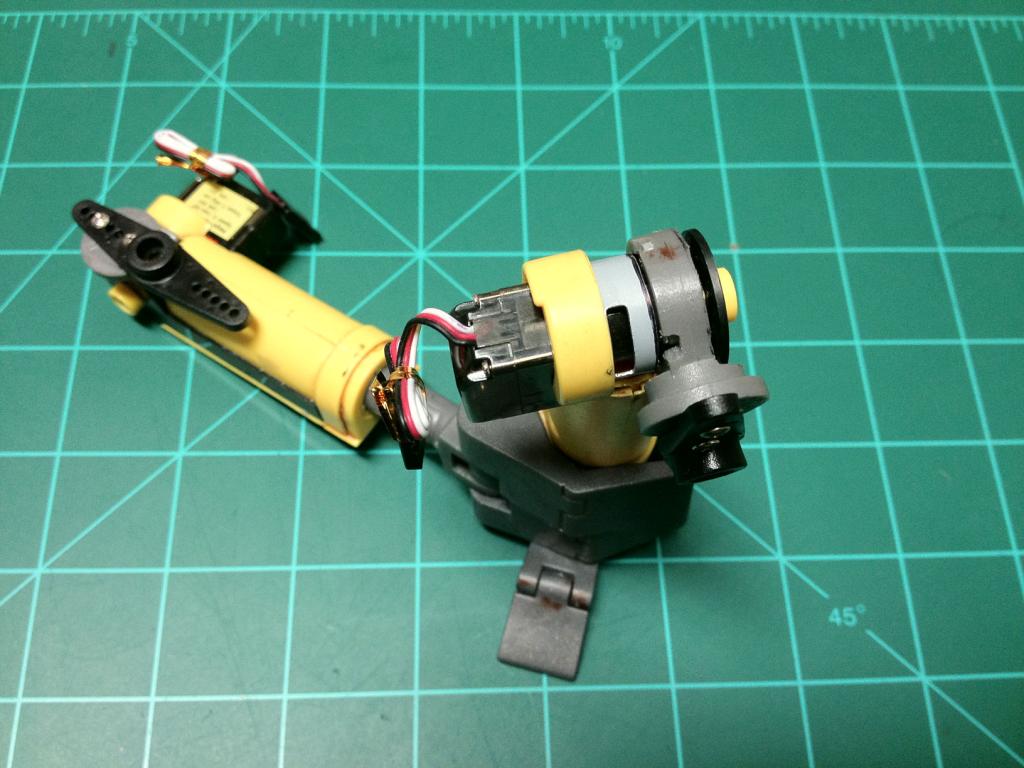
Inspired by DJ Sures and many other Wall-E projects on here, i decided it's time to make my own Wall-E and he will be my first robot build. I wanted him to be as lively as possible. I give credit to Joc's and Glickclik for the geared neck tilt and wheels tilt ideas, i just made it my own using the same concept. I still have yet to fully understand ARC so additional help would be greatly appreciated. Here is what im at so far in the project, some of the parts are hand made from raw Carbon Fiber with only a dremel and i use some parts from a 450 R/C heli as well as bearings in some of the joints.
Done so far:
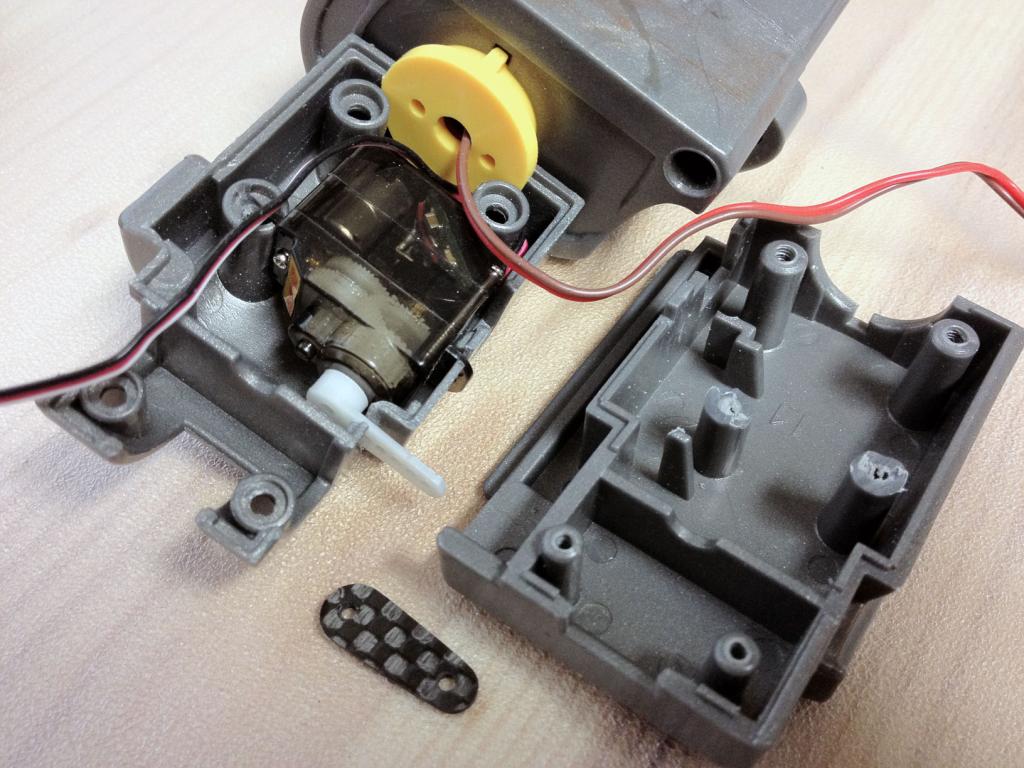
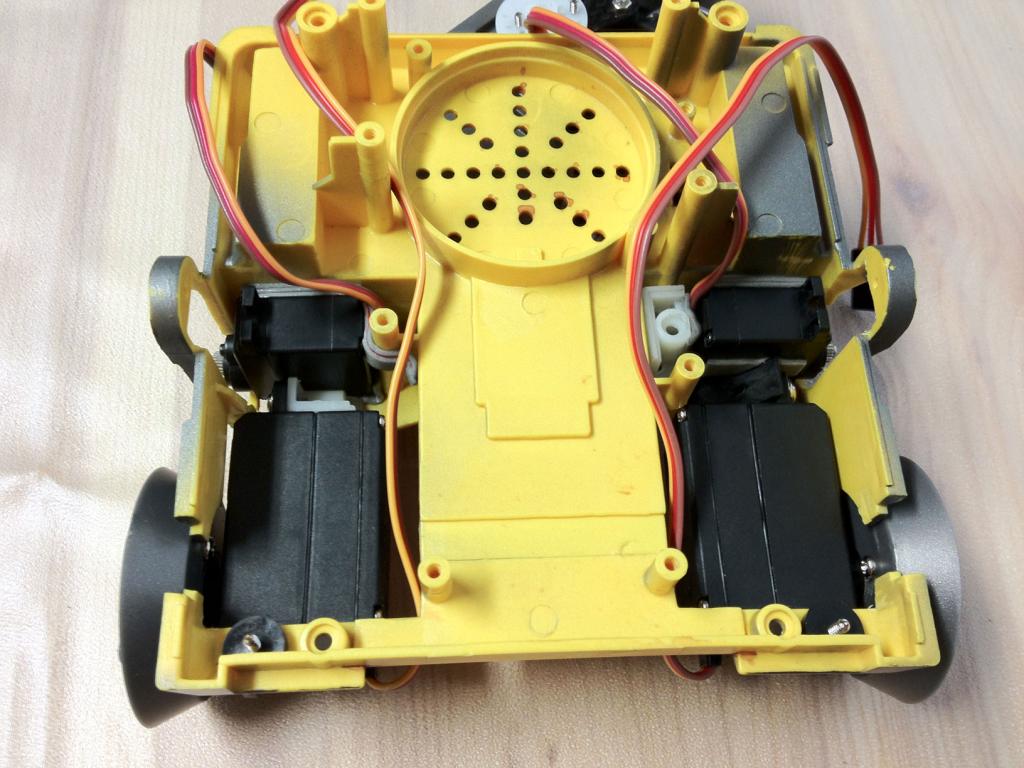
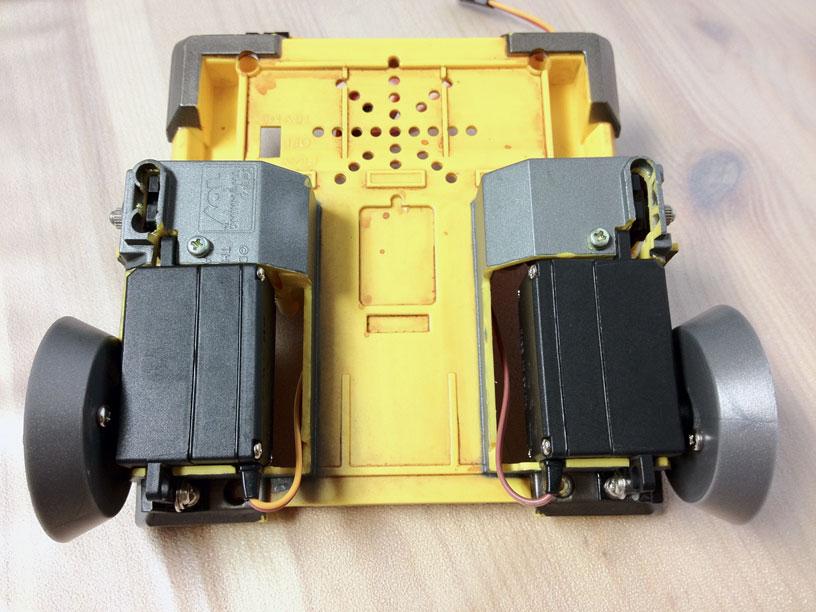
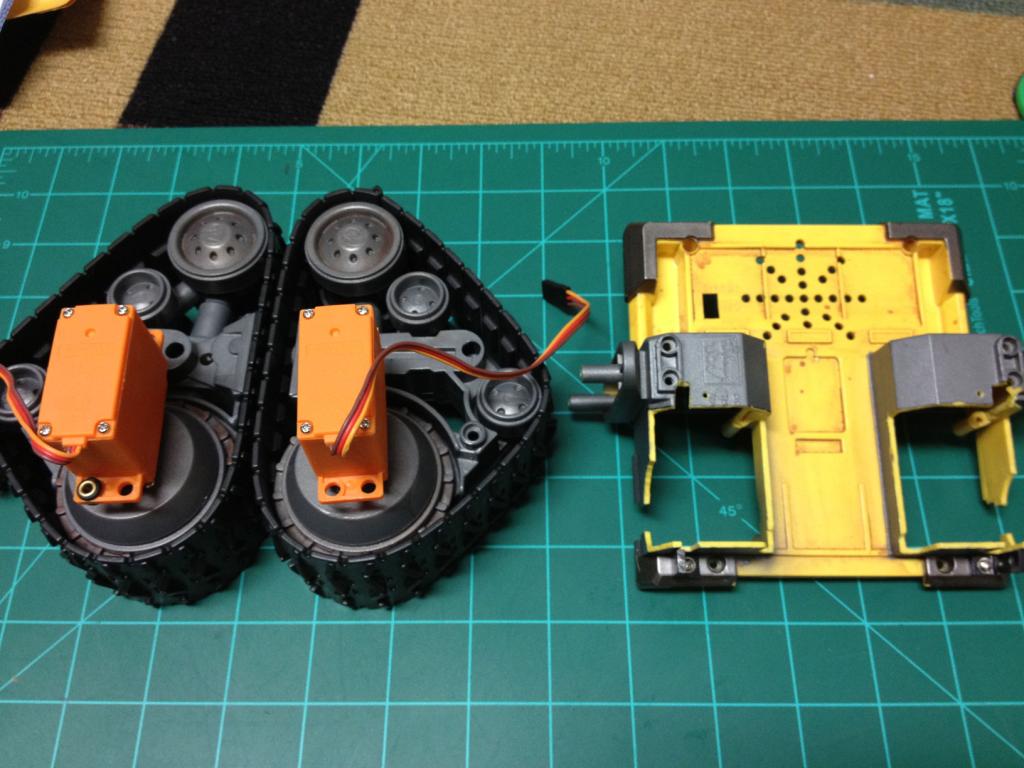
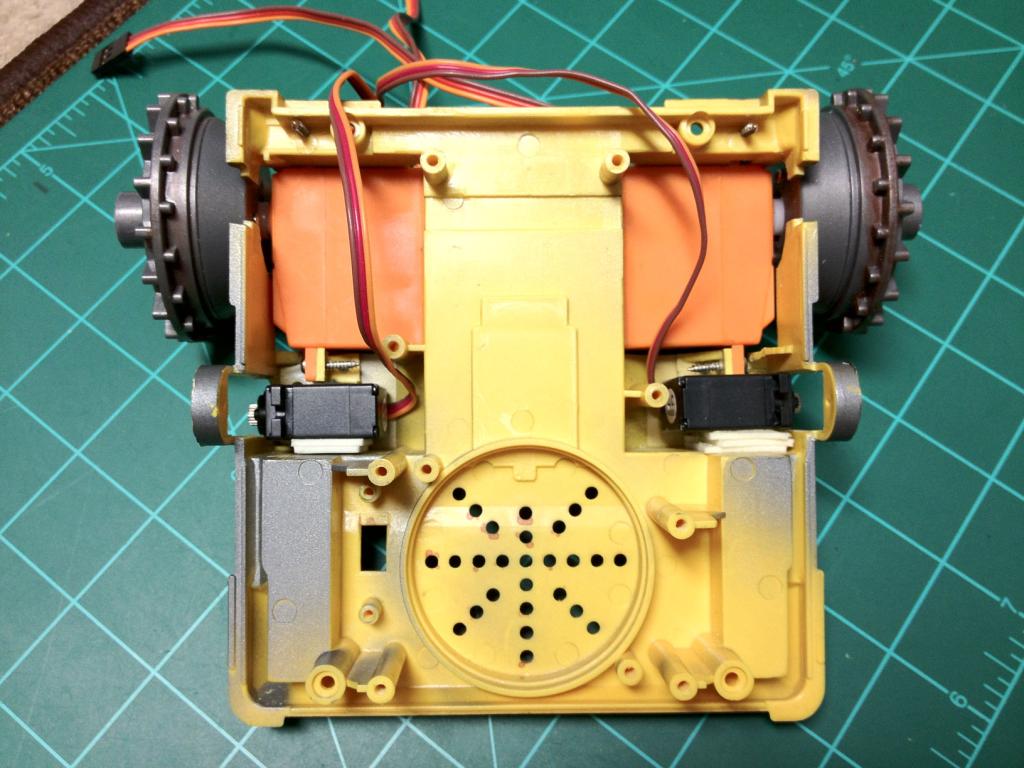
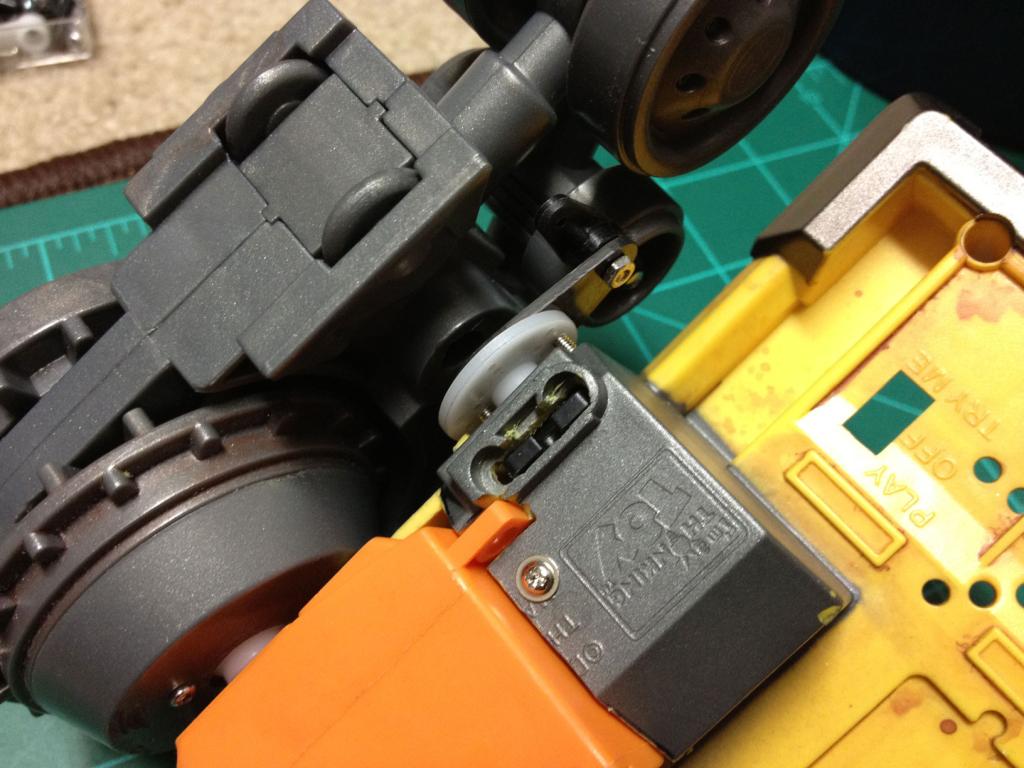
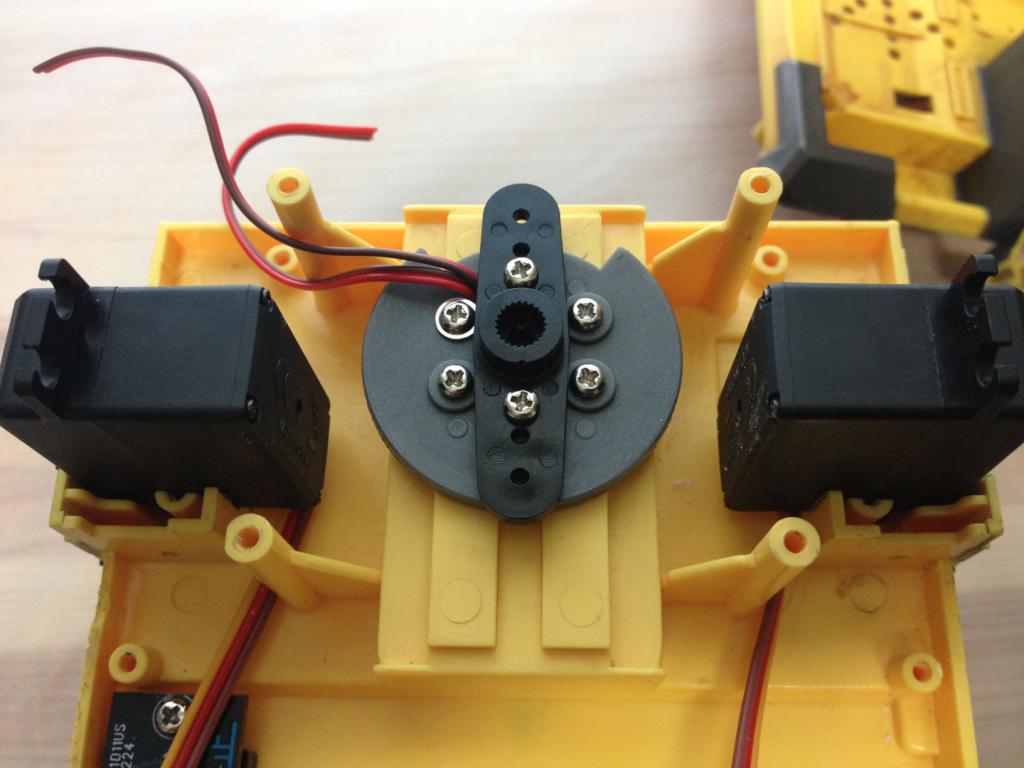
Metal gear high speed modified continuous servos for wheels.
Micro metal gear servos for wheels tilt.
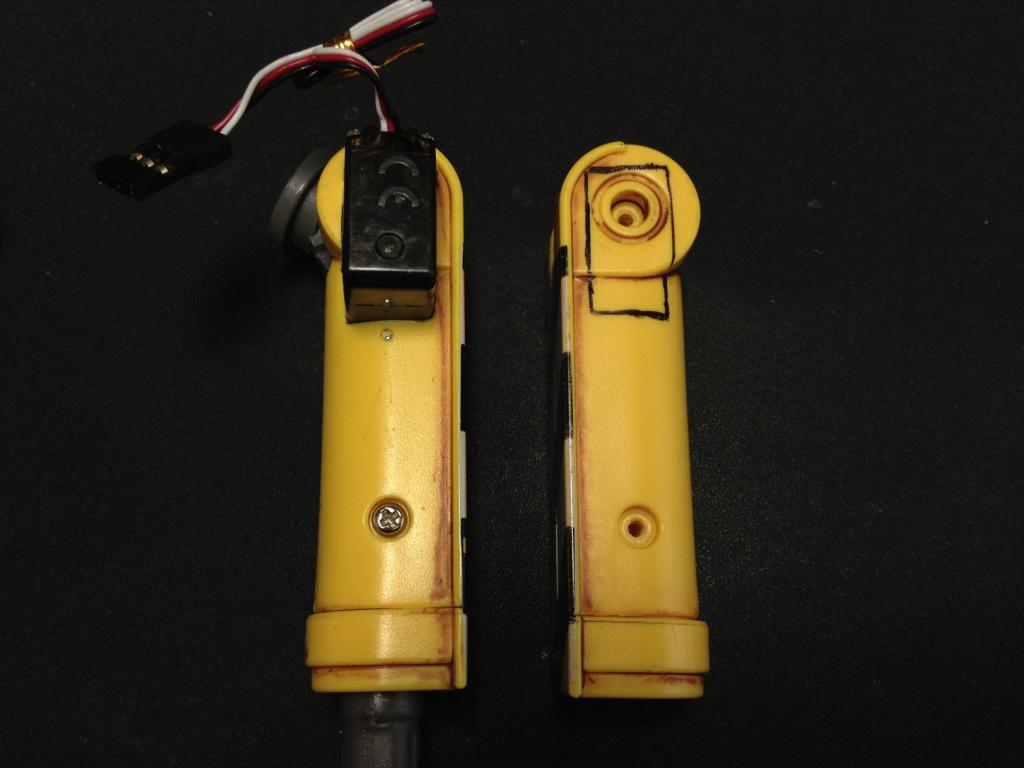
Mini metal gear servos for vertical arms movements.
Micro servos for horizontal arms movement.
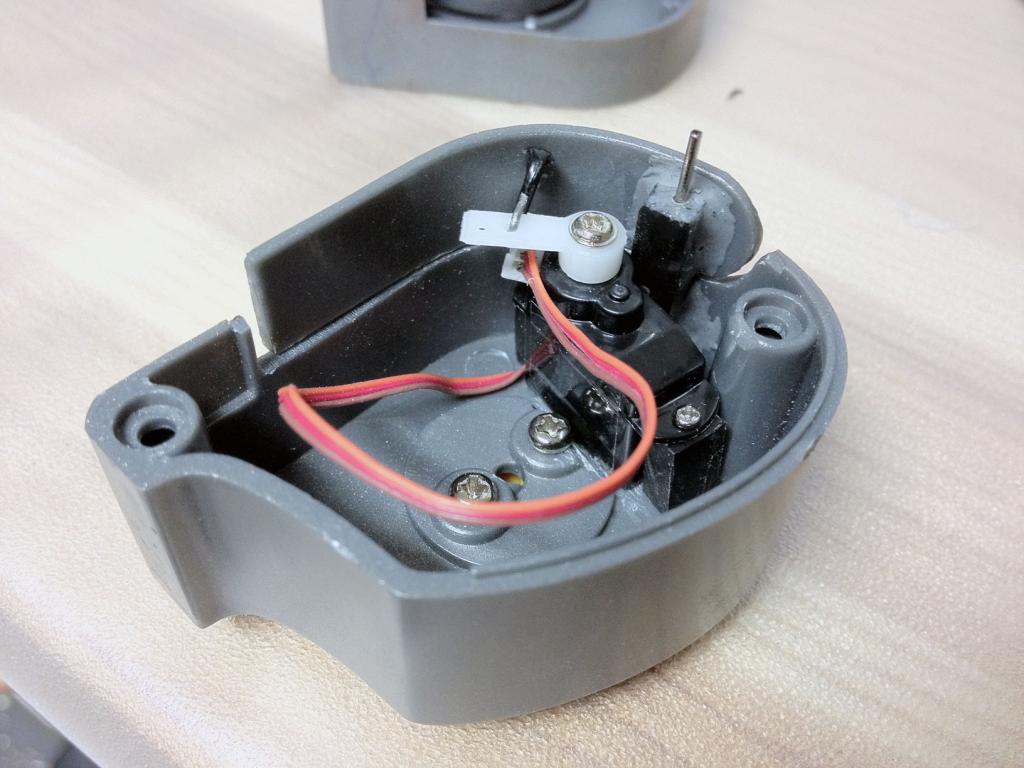
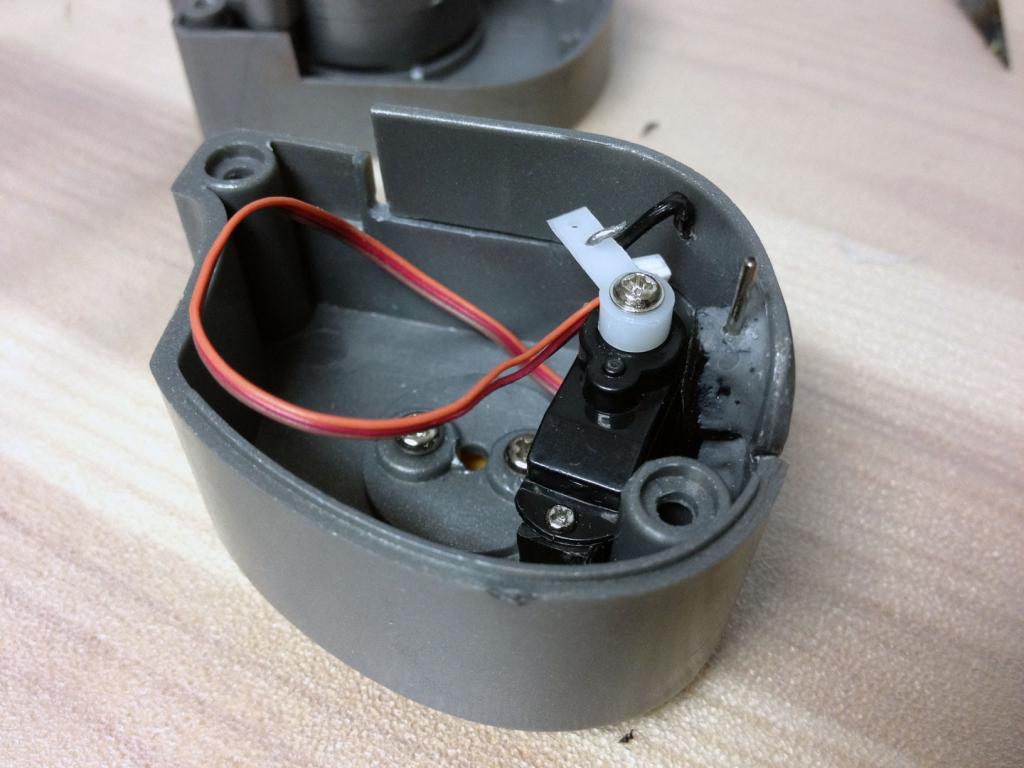
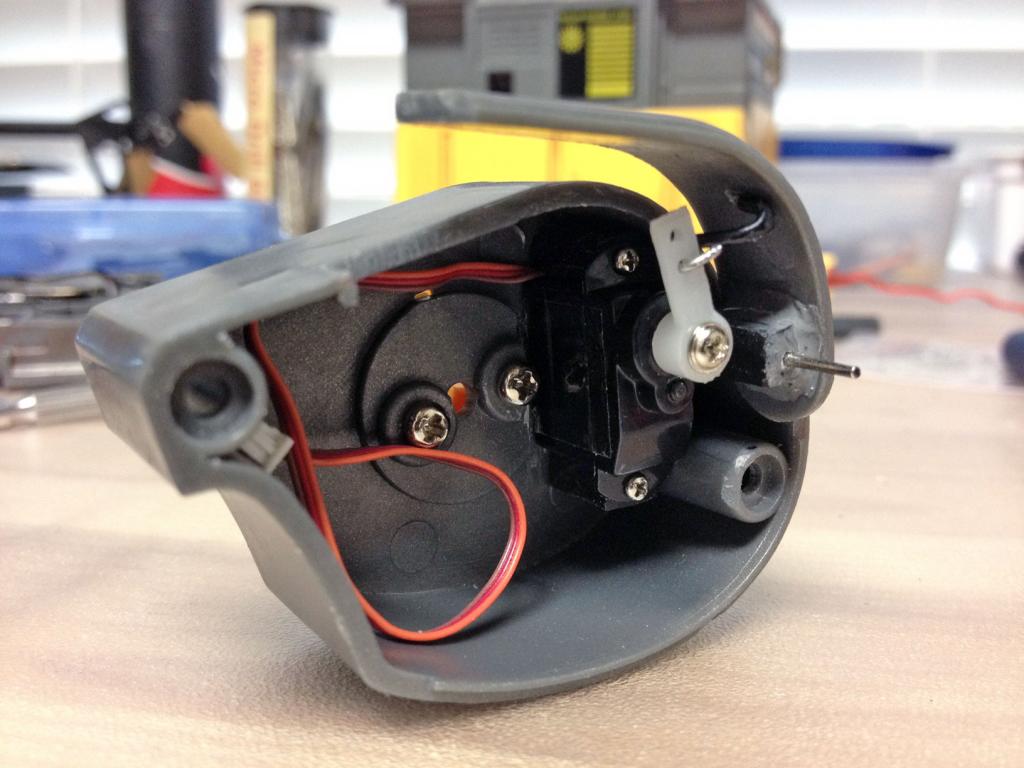
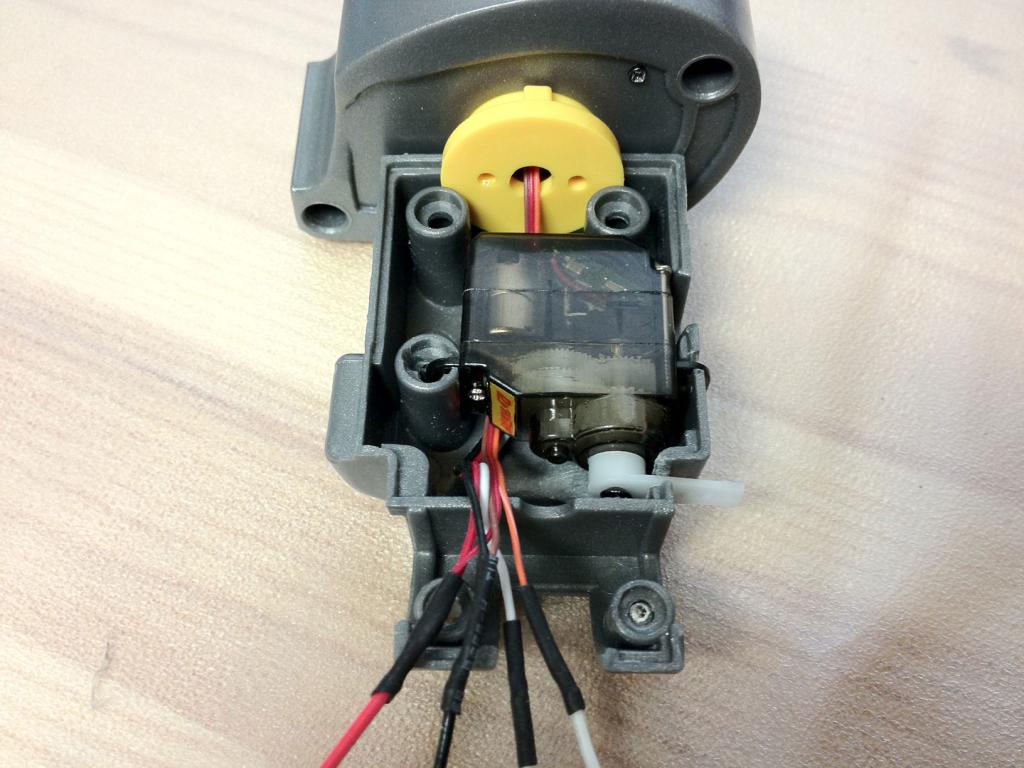
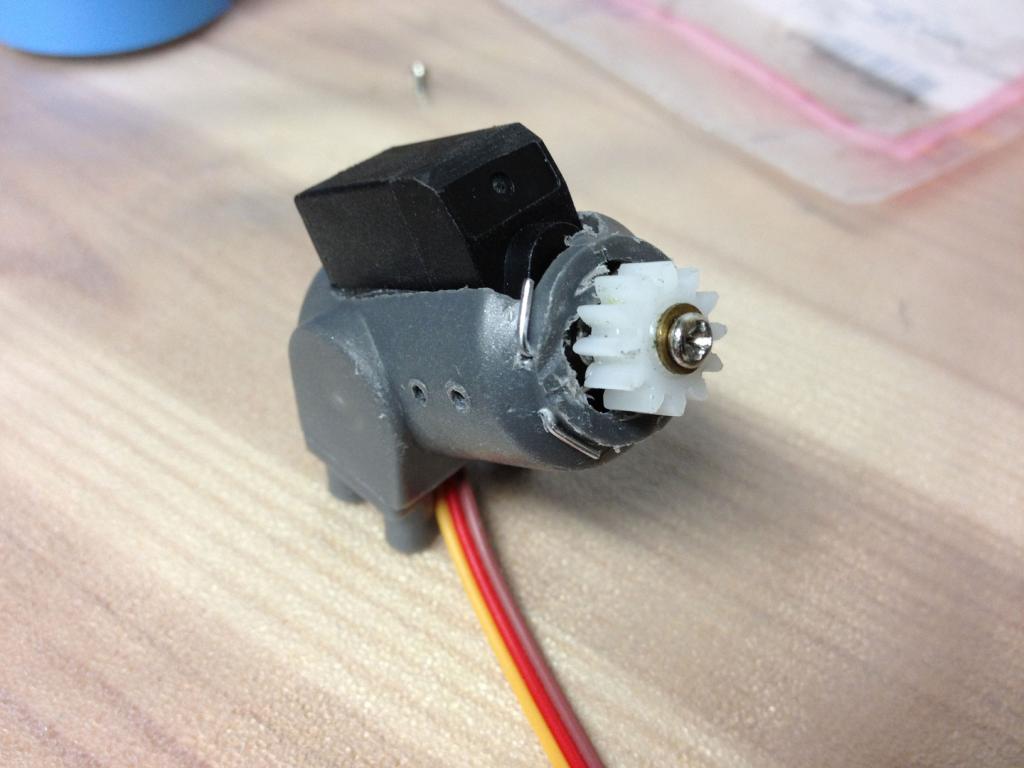
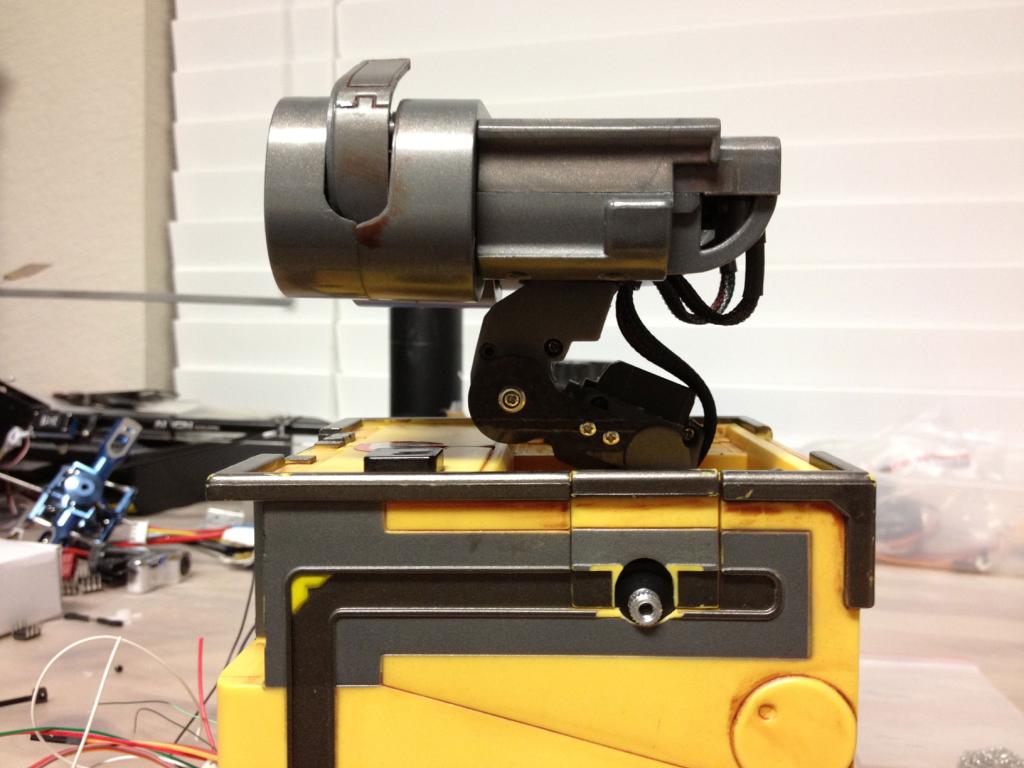
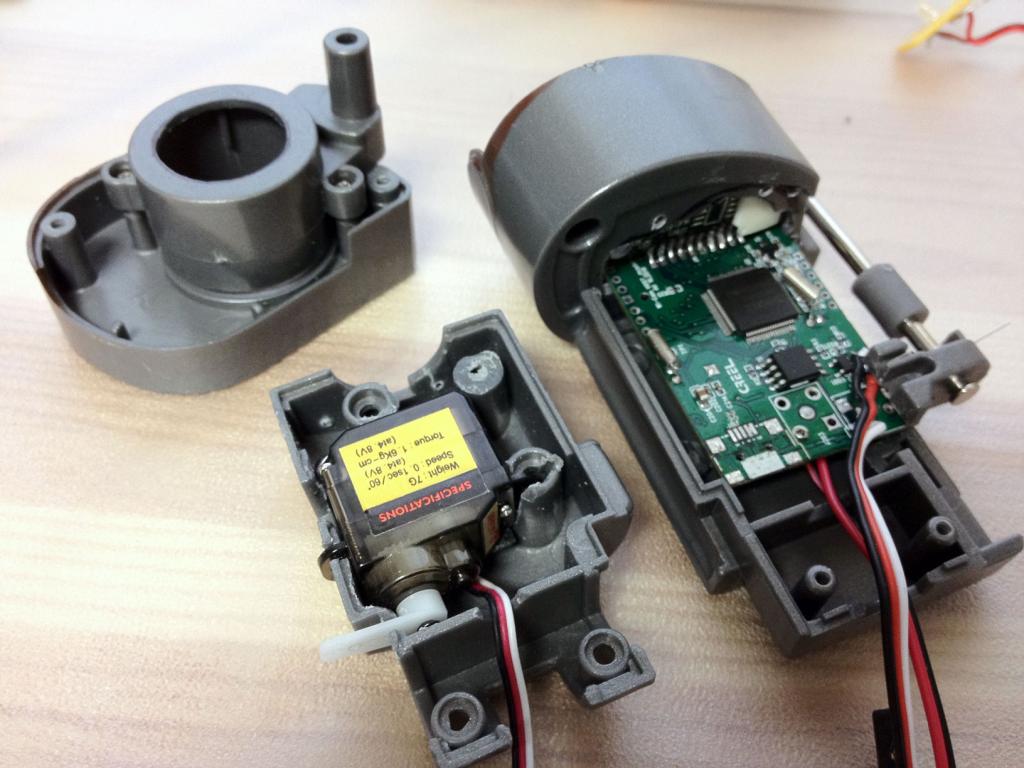
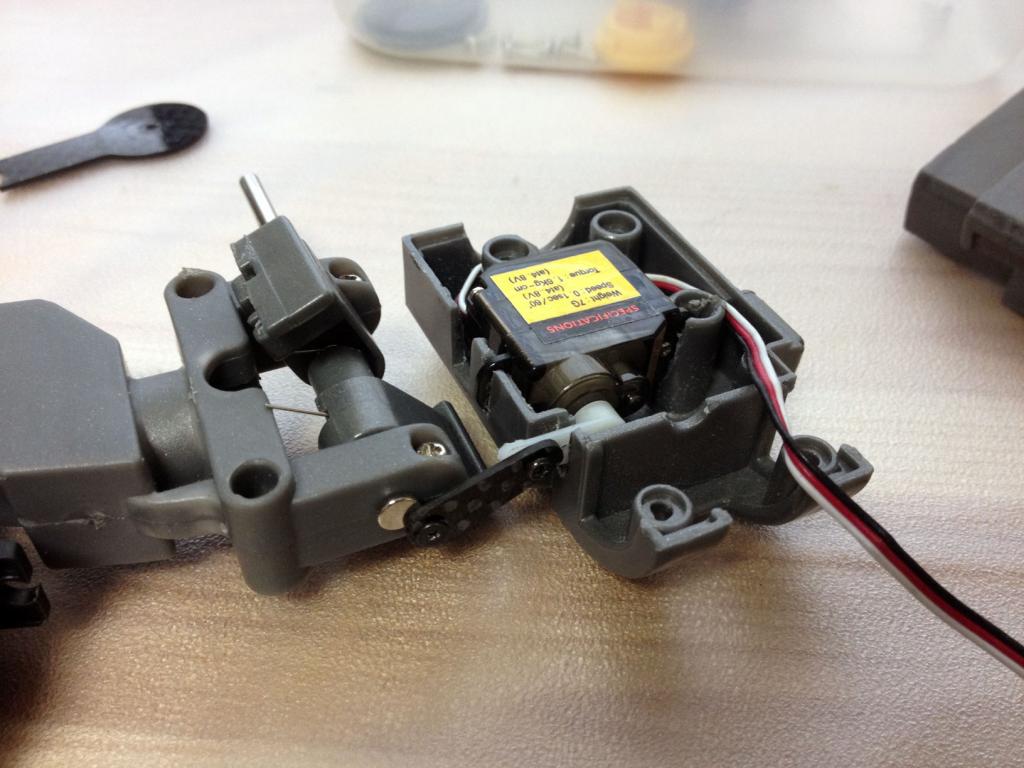
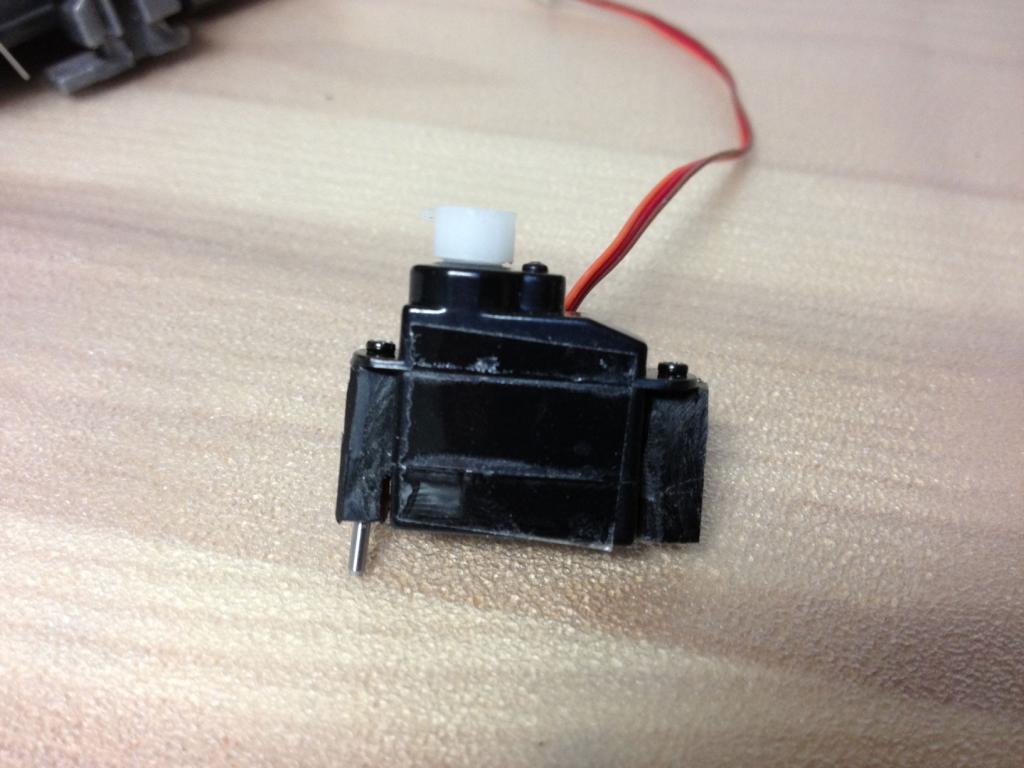
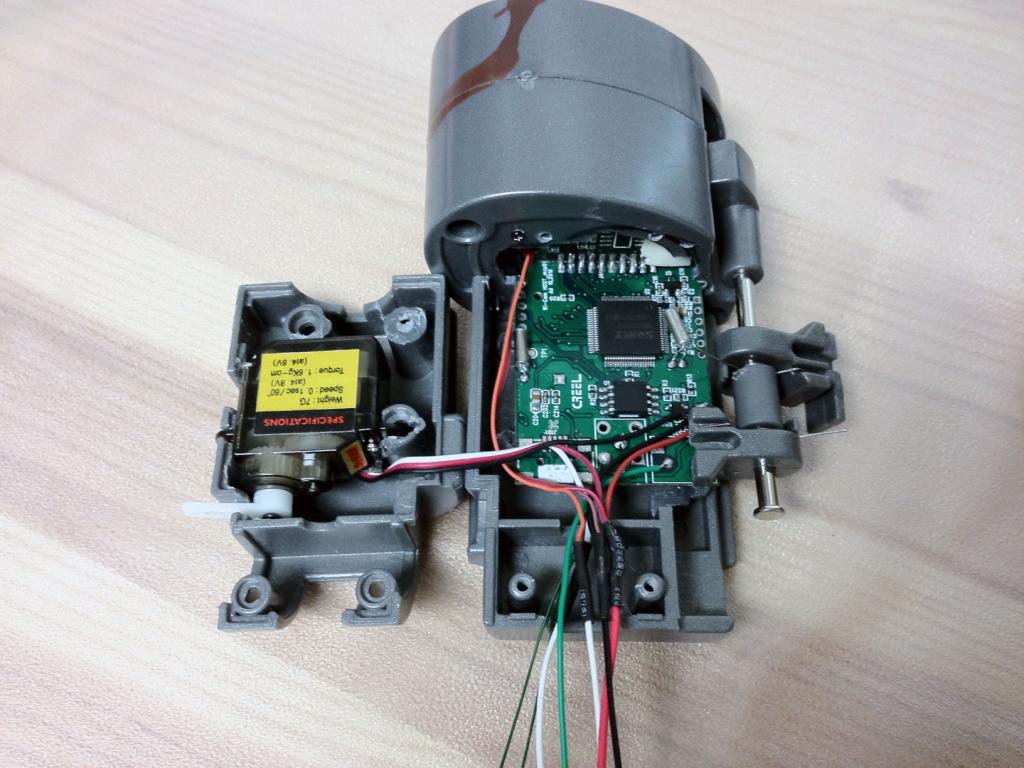
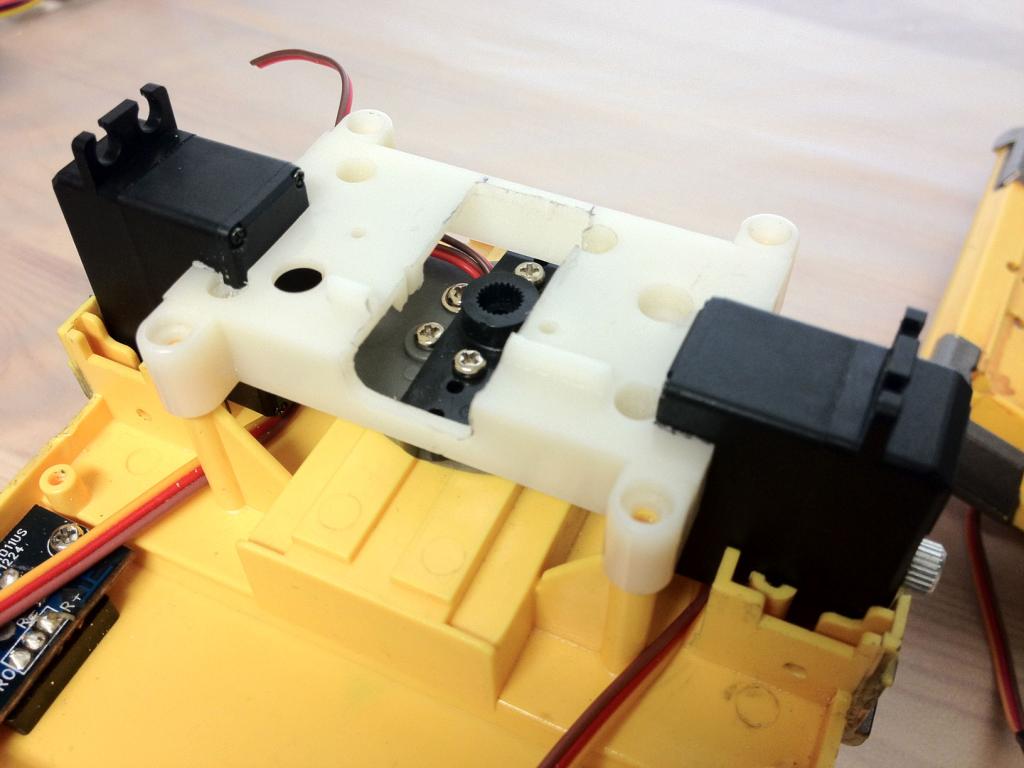
Micro metal gear servo for vertical neck tilt.
Mini metal gear servo for horizontal neck movements.
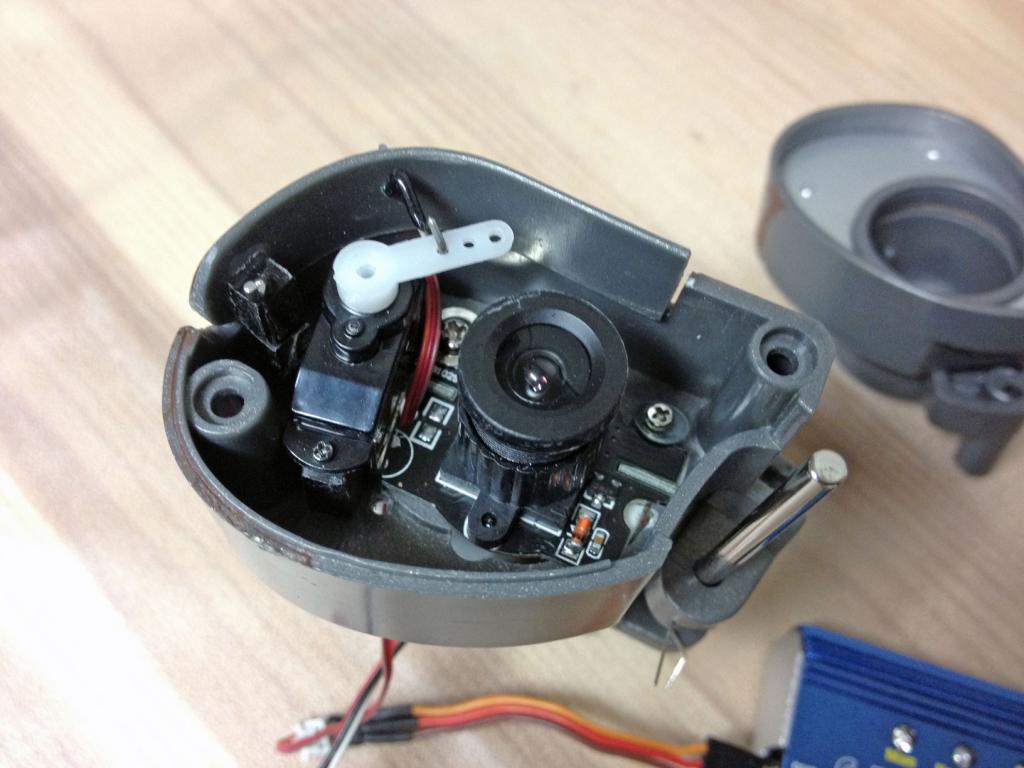
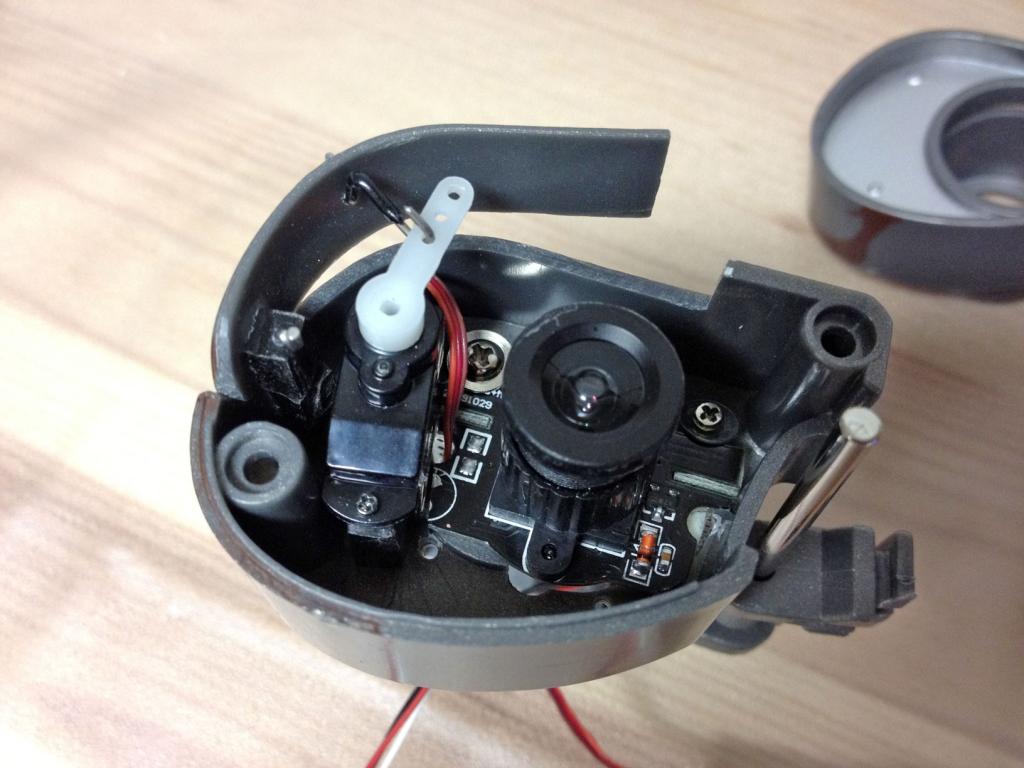
Micro servos for individual eye movement.
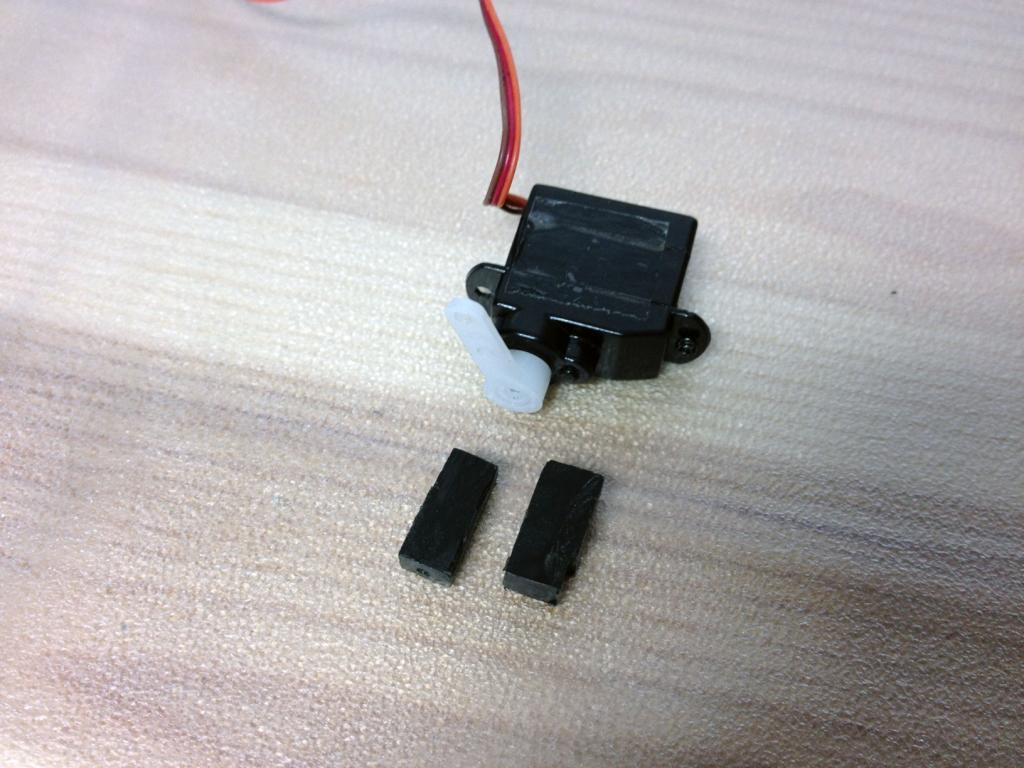
Sub-micro servos/mods for eye's lid animation.
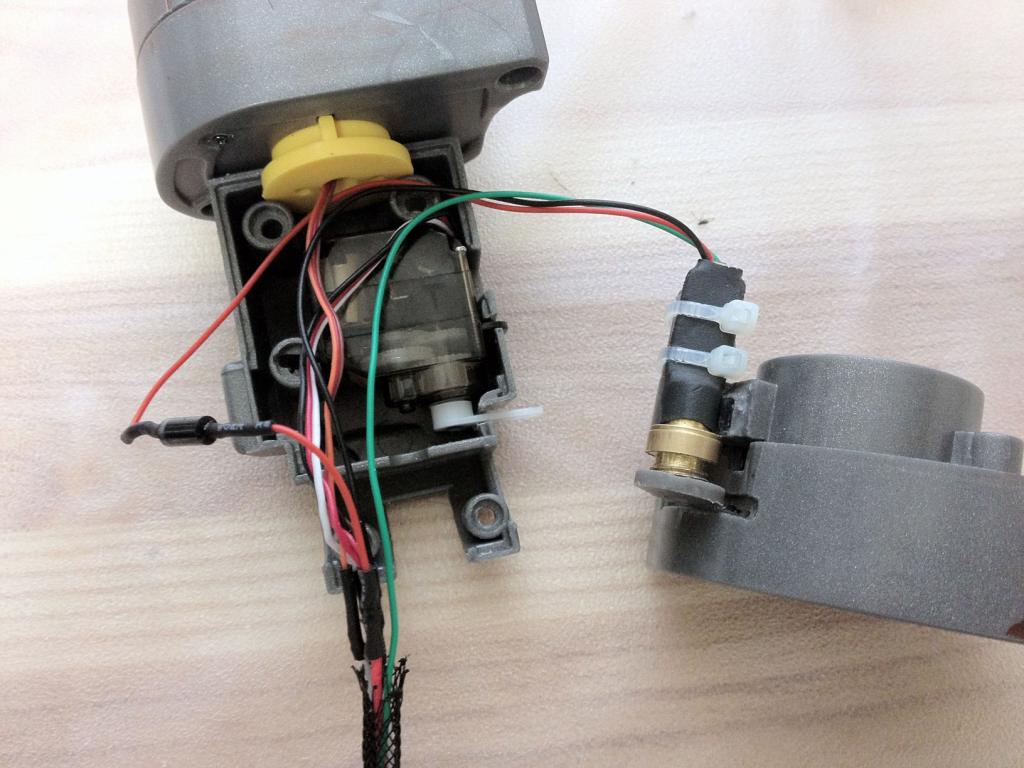
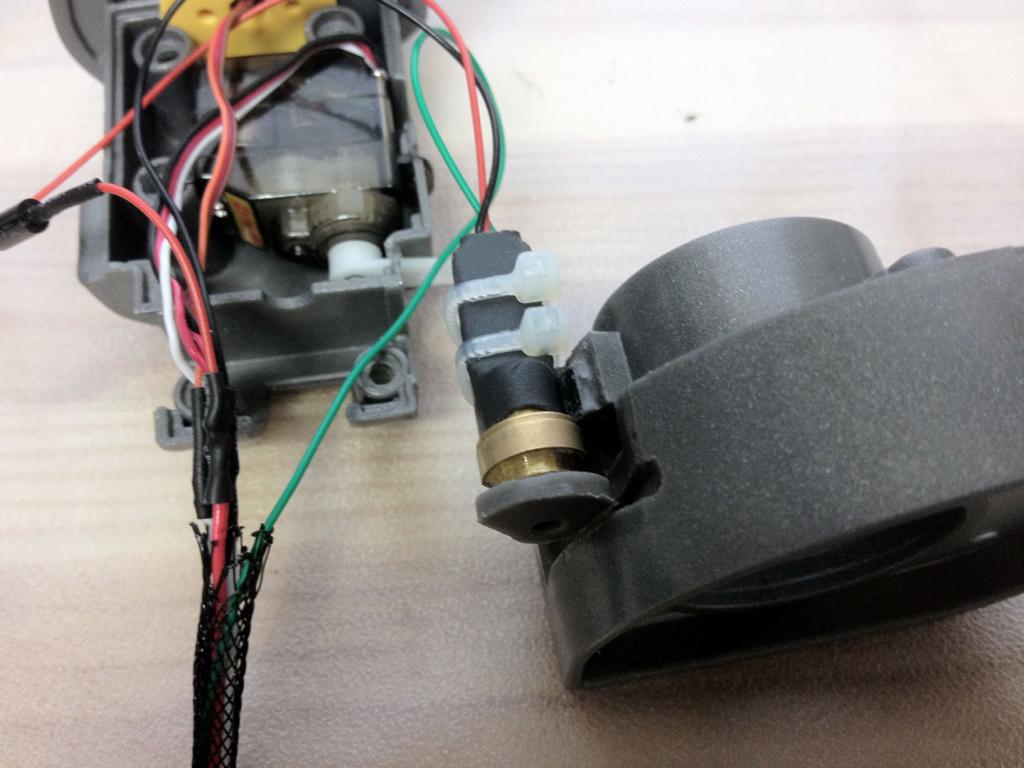
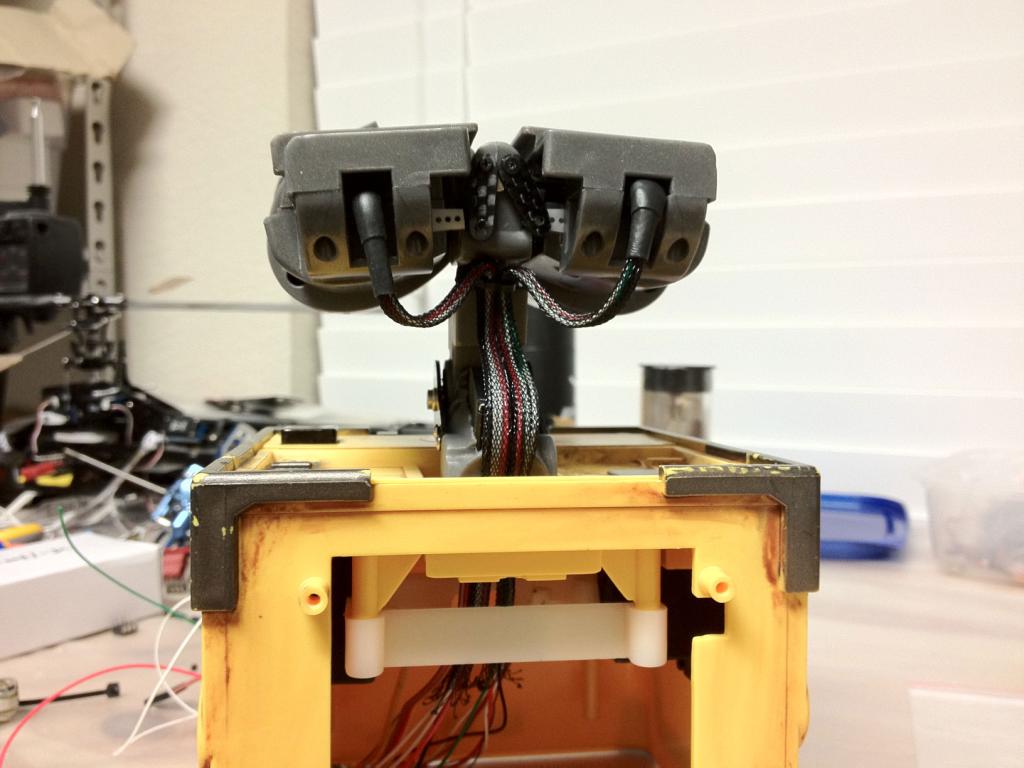
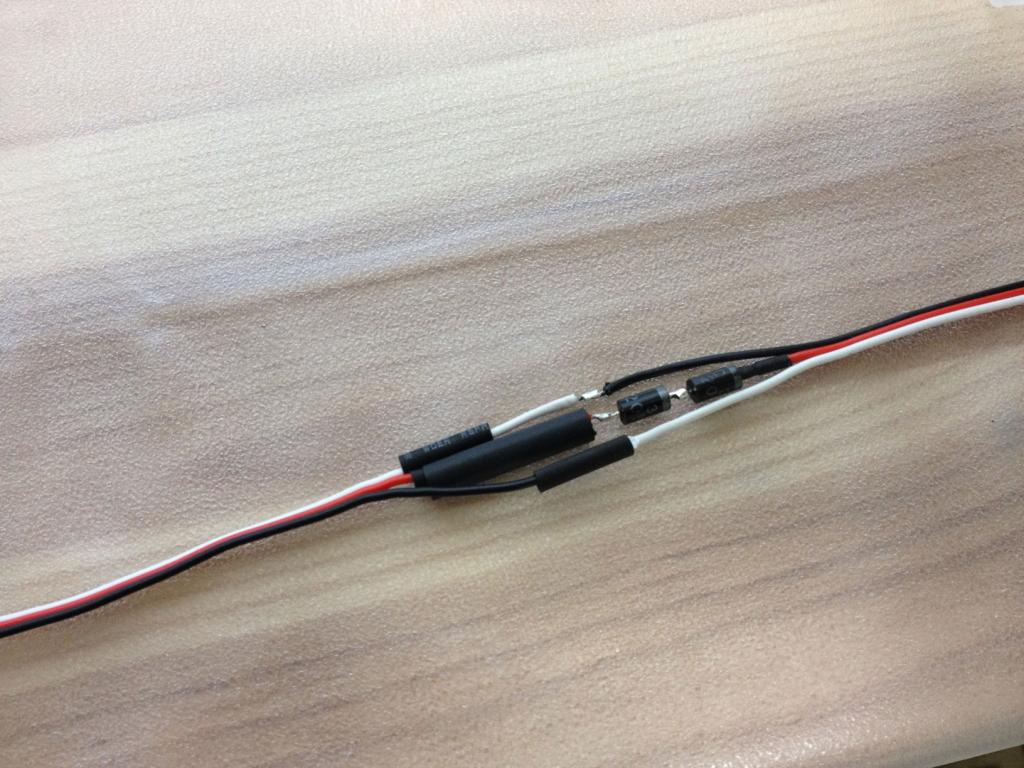
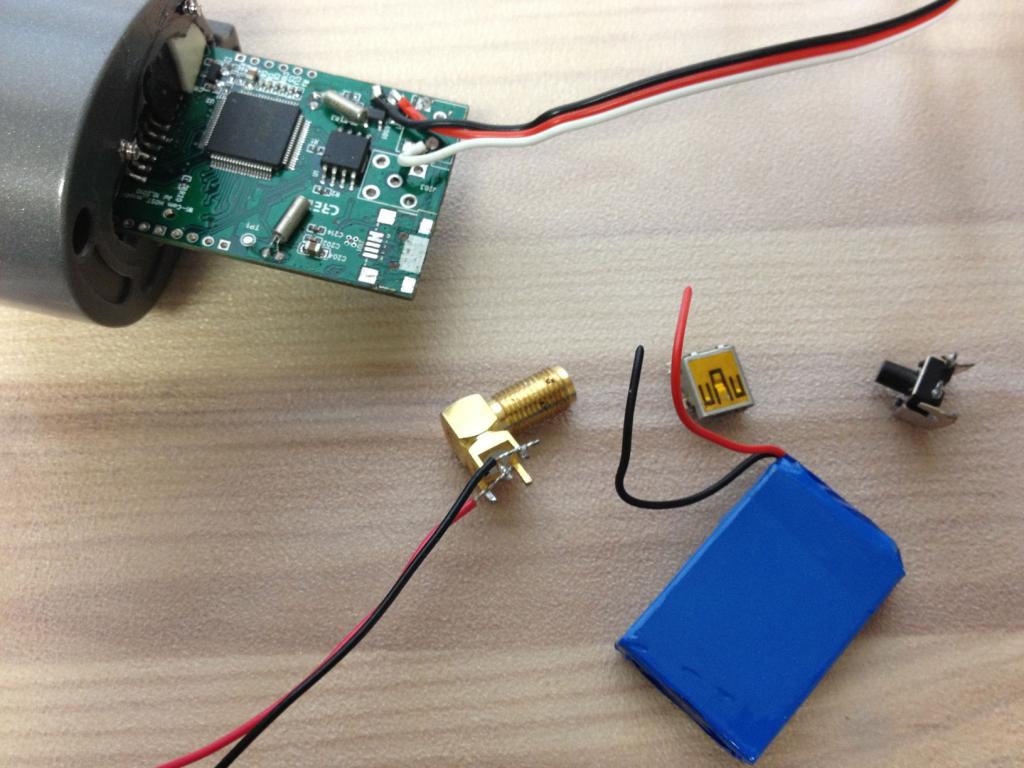
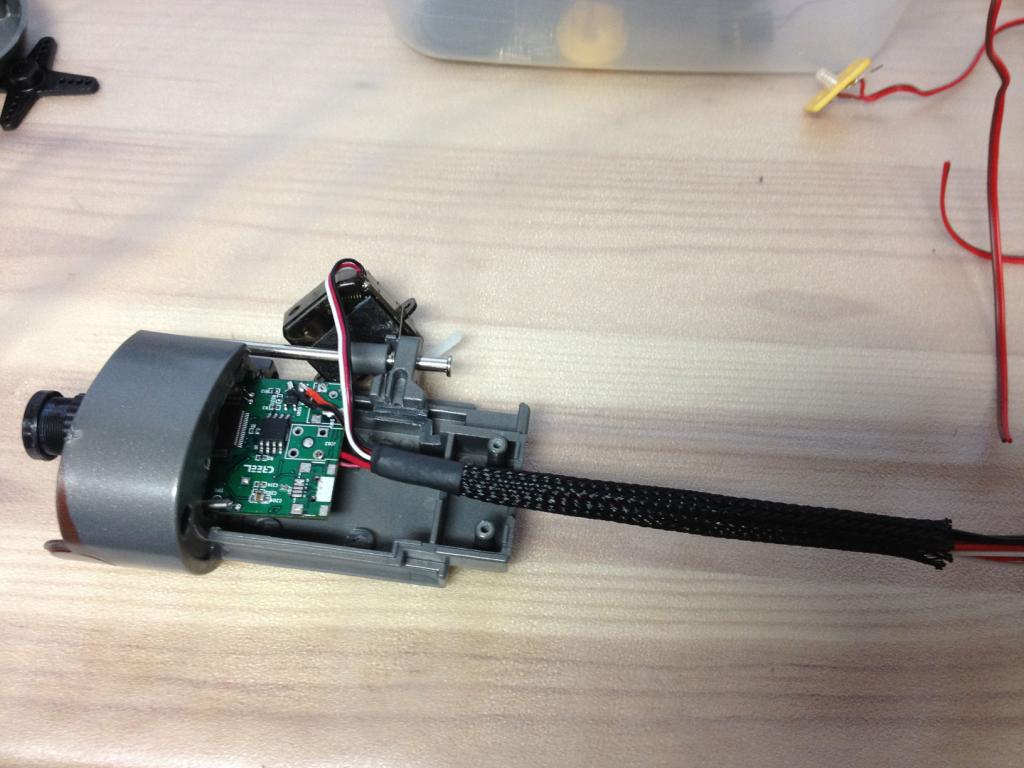
Get rid of dummy cables in the head, run all servos/camera wires from head down the same way and use heat shrink/black nylon mesh for realistic look.
Red laser between eyes.
Mock up left eye's lens.
Other things to be added/changed as i go
Yet to be done:
Light up solar panel (most likely, still thinking) Red LED in front in the black spot next to the solar panel (definitely) Make his wrist rotate (don't know yet, still thinking)












Discover more robots

Daman's Halloween Display
Perry's Inmoov Conversion


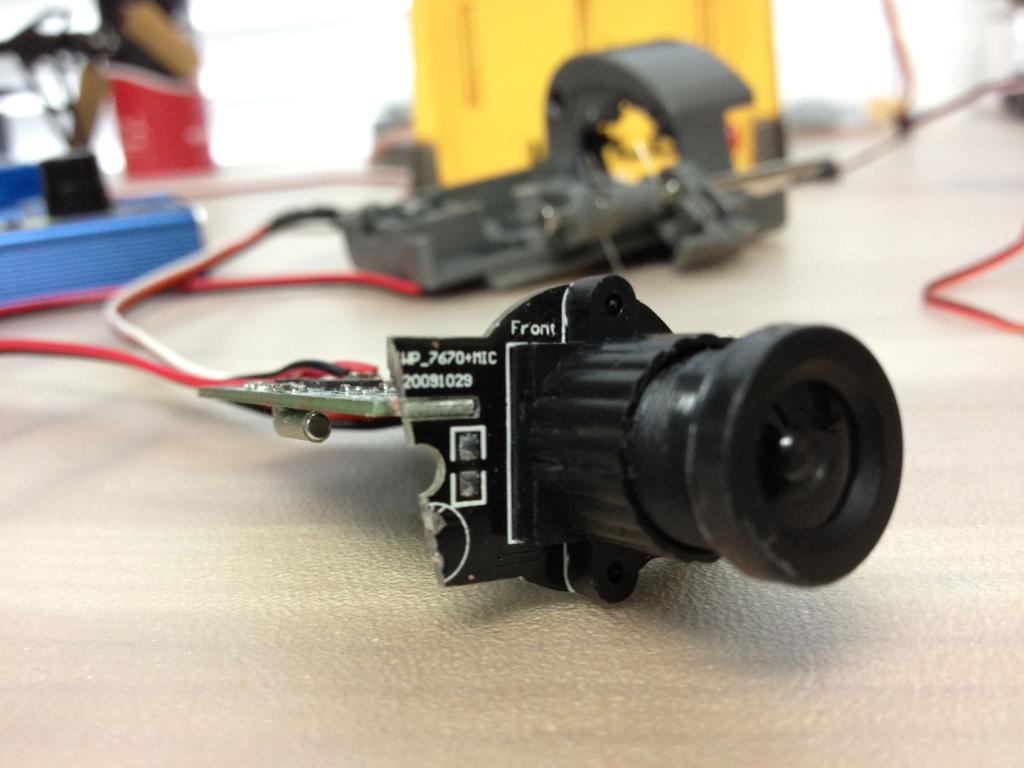
Don't panic, I know the face recognition and color tracking works because I've had "Bob" follow me around the lounge room - both face tracking and using a red plastic bag. At first, we had problems too. The main thing with this stuff is to be in a well lit room - you need plenty of light. The camera that comes with the kit is limited (I'm not sure if DJ uses the same one in his demo - hopefully he does) but it will not work in dim light. You also need to play around with the position of the red cross lines that come up on your viewing screen. Ultimately you could get yourself a higher end camera that is better at handling low light levels we experience indoors. Hope this helps
Actually played with the time frame, red crosses, servo increment some more and got everything to work, motion could use a bit more work but im happy face and color works now. I'm still playing with scripting because i haven't got a clue how to put everything together for what i want Wall-E to do. Would you mind sharing how you get Bob to follow you around? script example would be great. I like how you build Bob out of household stuff, im thinking of building similar robot out of a round trash can as body, two small speaker shells for the head.
Hi Louis, great to see things are working. We have the servo Movement Panel hooked up to the radar scanner - obstacle avoidance - for him freelancing around the room. If you go into config in the camera settings you can tweak the settings to the servo's used for motoring the wheels. With the camera your face or colored object has to be in the correct frame of the camera, you can only move slowly. I had my son Austin viewing me through the camera and correcting me so I stayed in the frame zone - and it followed me-- as soon as I moved out of frame it stopped. I'm sure a much better camera would deliver better results ( less light needed and bigger frame zone). I've not run it through a H-bridge to wheel motors yet but it should work the same.
Yep, i tried to get things working one at a time, slowly but getting there. Thanks for the tips, i'll try that when i have wheels on, right now Wall-E just have a head and body, no hands or bottom
I'm having a bit of trouble with the servo movement scripts. I want to make Wall-E head move up and down in a natural motion like this real Wall-E when he says his name, watch his head move up and down:
But setting servo into specified position make Wall-E head notch really fast up and down, not very natural looking at all. I'm limited to programming so I can only depend on script. Any inputs?
to replicate that typwe of motion you will hae to use relative servo control use both neck servo and eye servo make the ratio like 1.5 or somehting...
so when the neck moves up and down the eyes move too....a the same time.
you have to combile many or the servo controls and ge creative witht he servo commands....
Also you would also add the body tilt. I could not get my relative servo to work quite right when I had my wall-e together. That would really look great if you could get it to work. I mean you will eventually because you have all the joints you need. Do you have your current script uploaded on the cloud? It may help someone if they could see the min and max movement of all your servos.
Ok i have almost got him to move like i wanted by combining relative servos with external control and the following codes:
But i don't want external control on everything relative to servo D9 on the other movement, how can i enable it for only the SayName function? then disable it at the end of the script? I'm not sure if this is even something possible yet.
write a specific script for it, name it, then in speech commands type in commandcontrol(scriptstart, "whateveeyounamedit") for whats your name.
and yes you can disable the script by using the command control feature
commandcontrol(pauseon, "weyni")
this is all off the top of my head so please refer o the exact list of commands on the left hand side