




















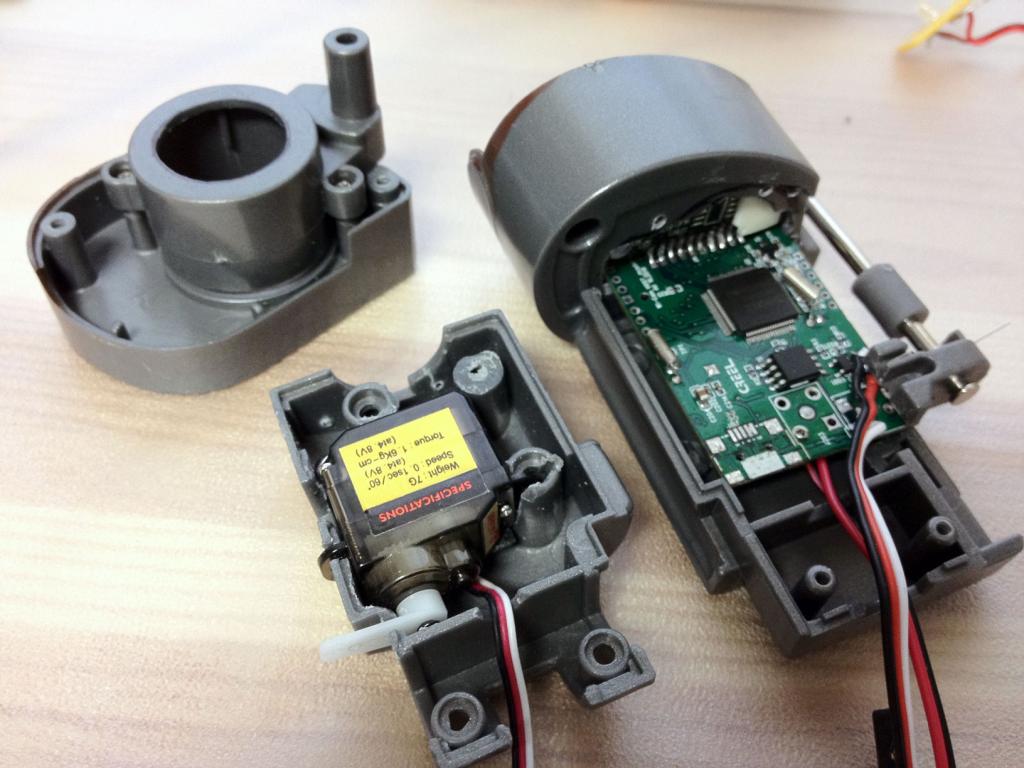
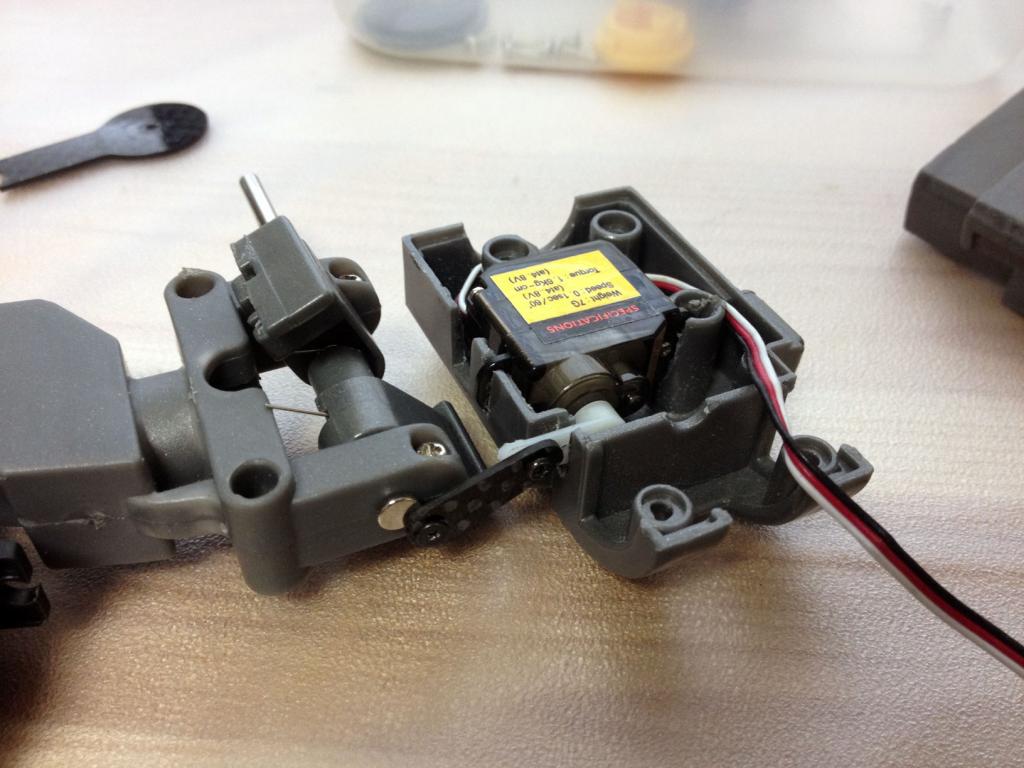


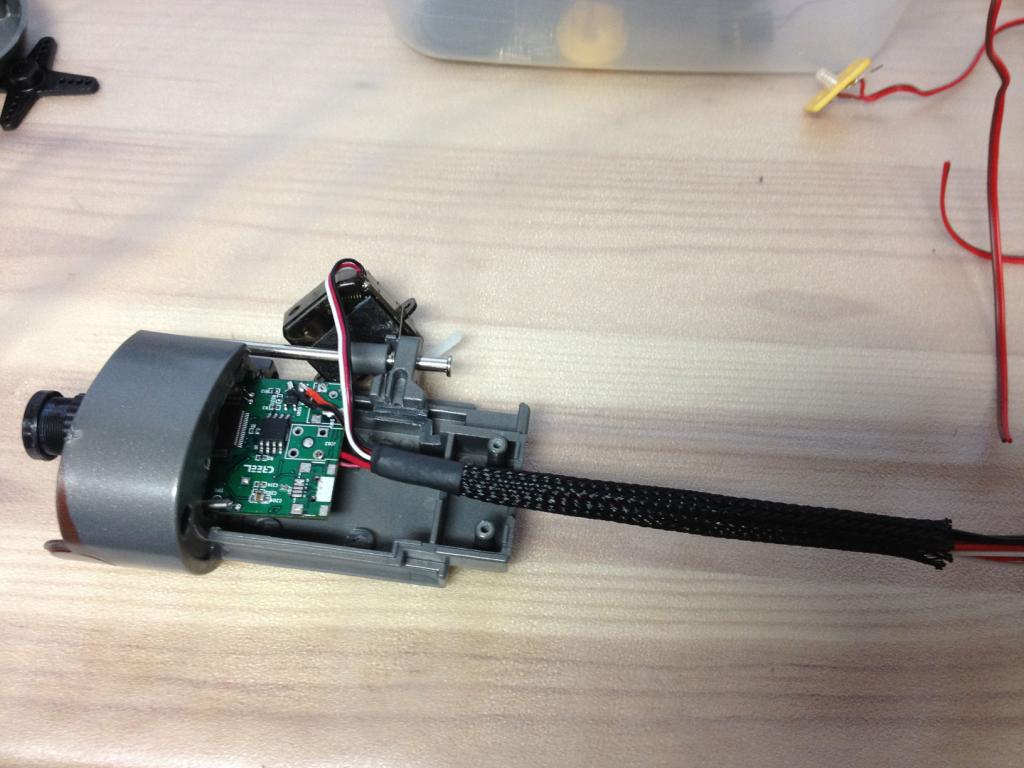



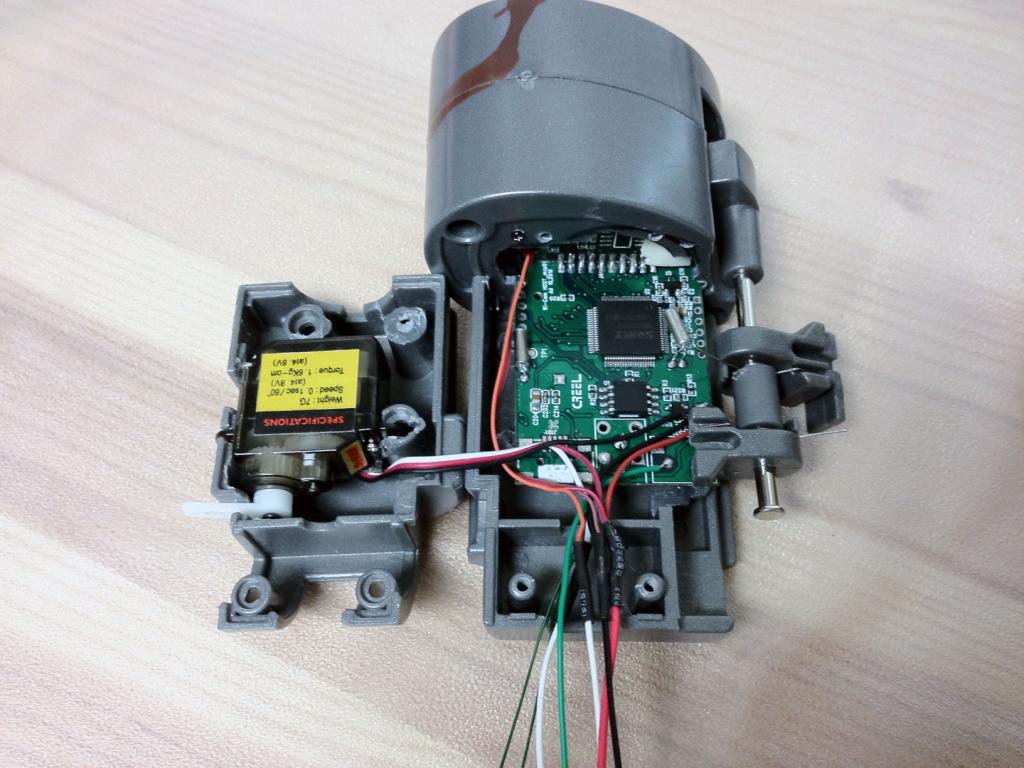


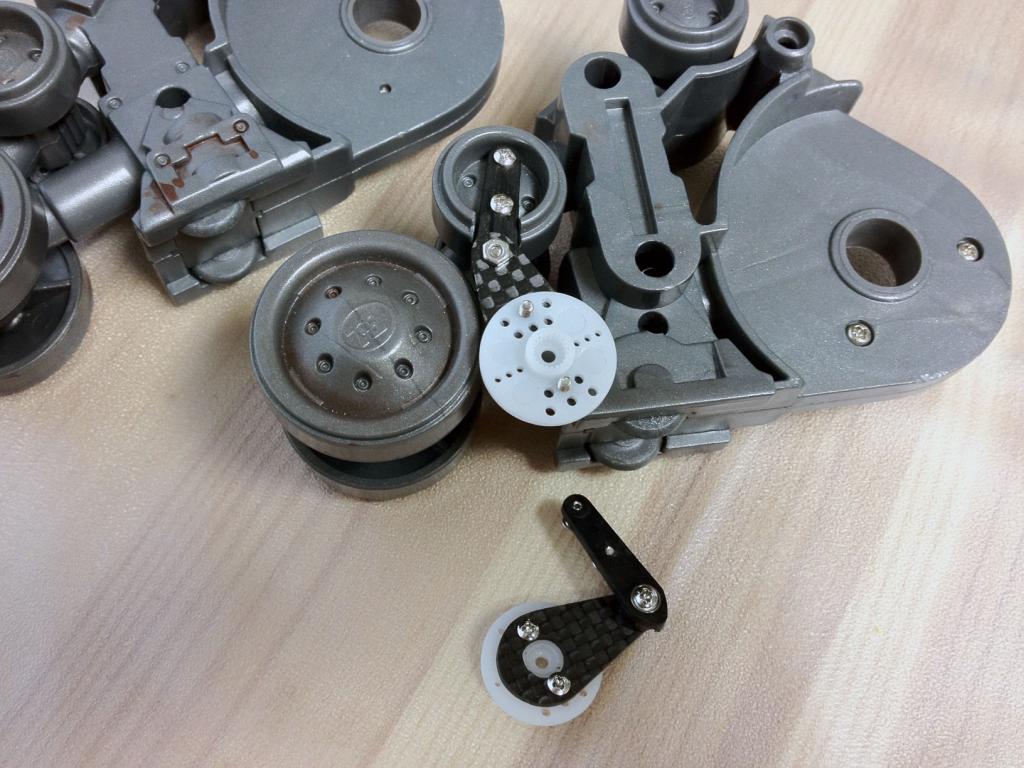
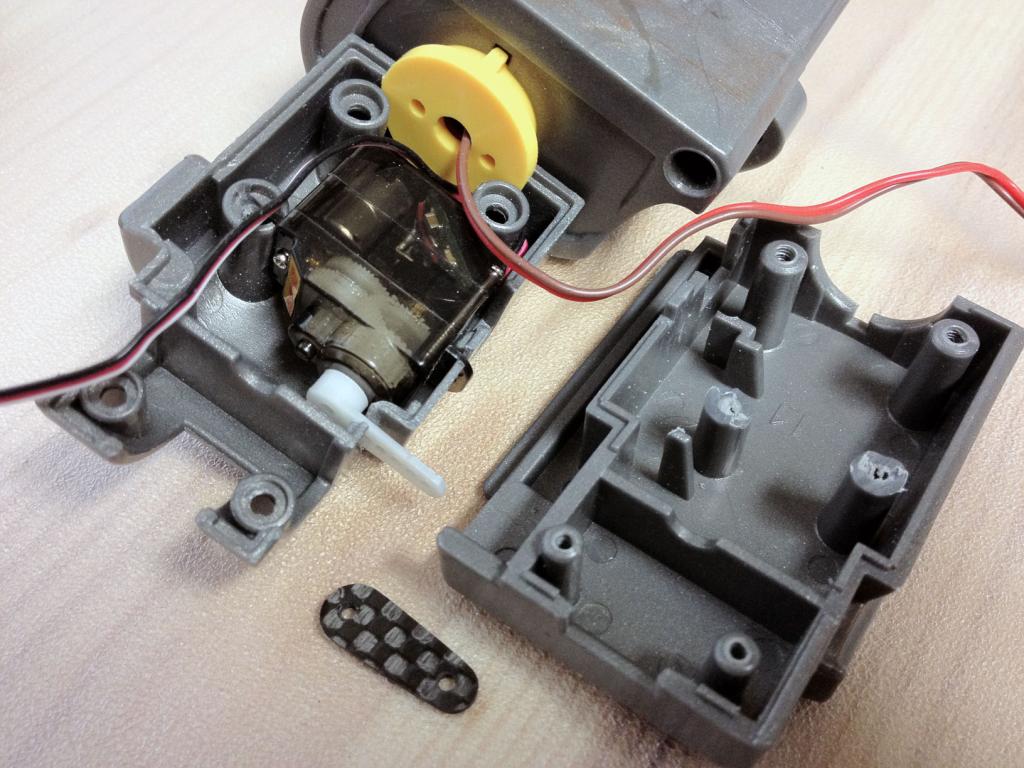




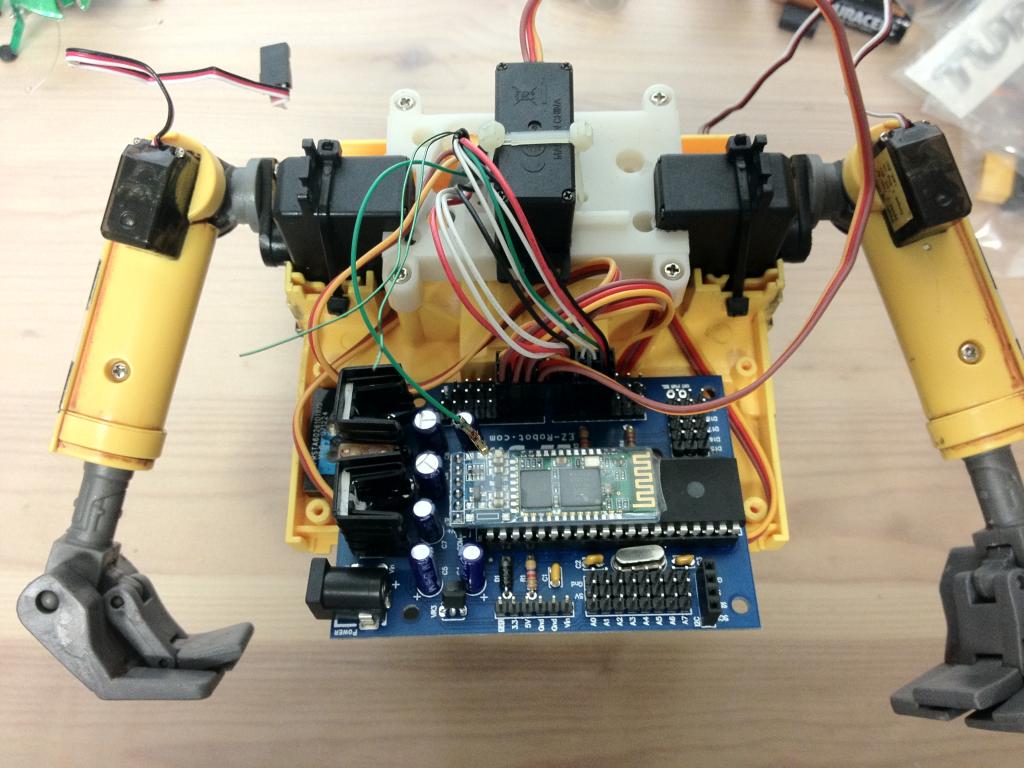
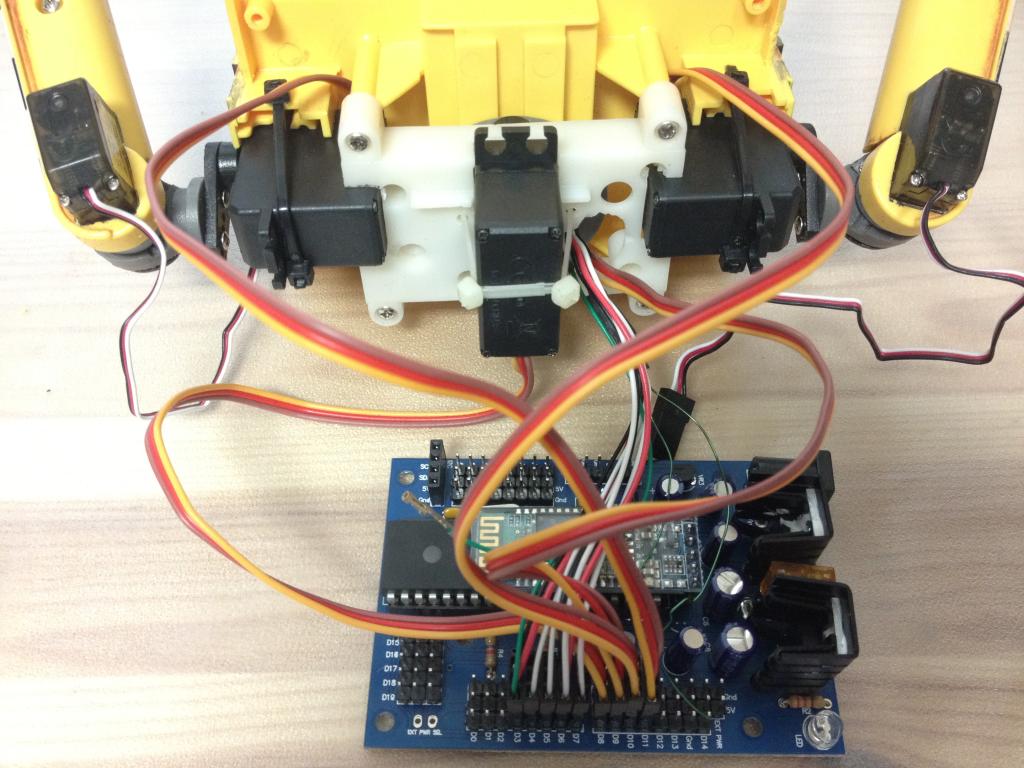
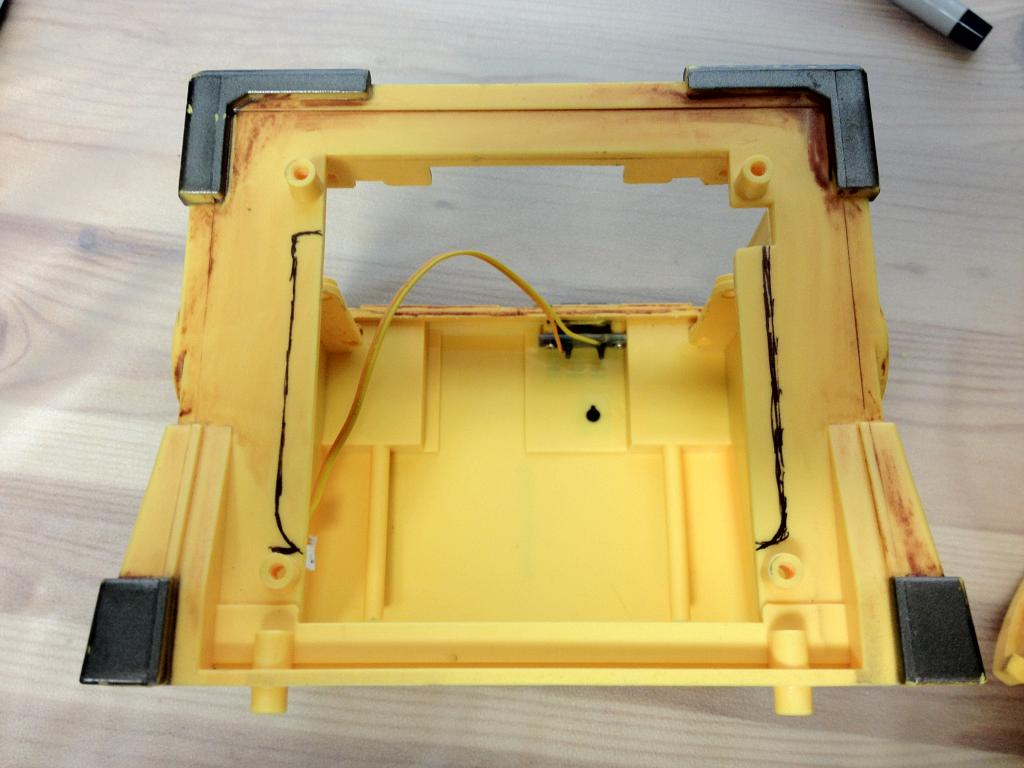
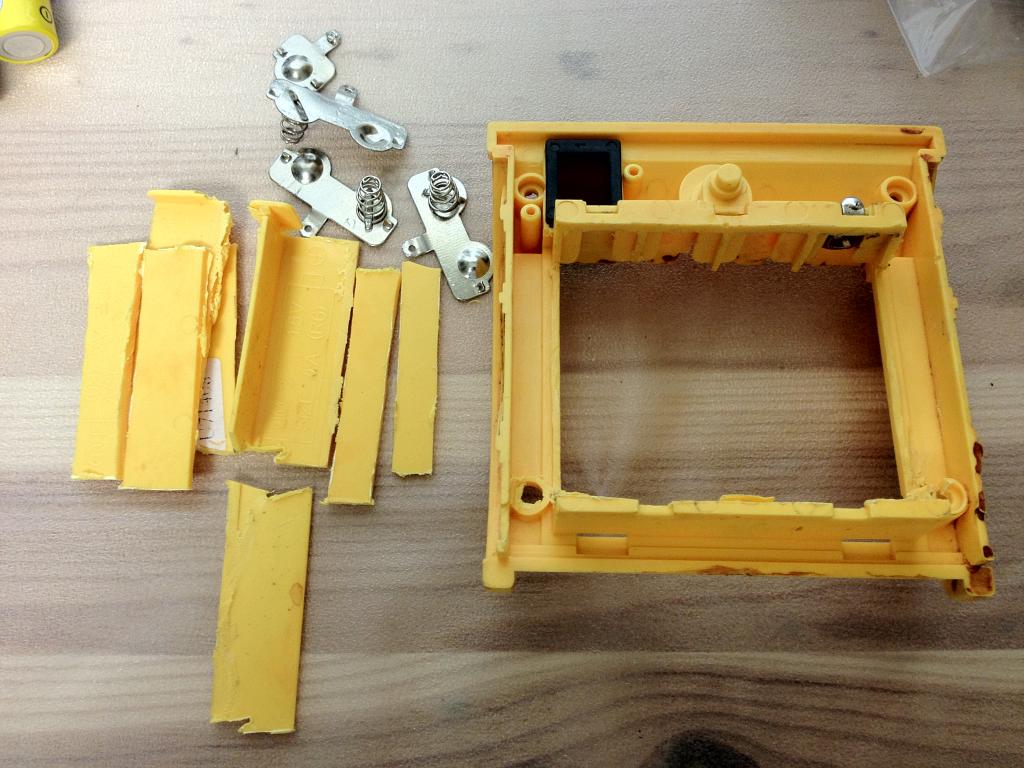
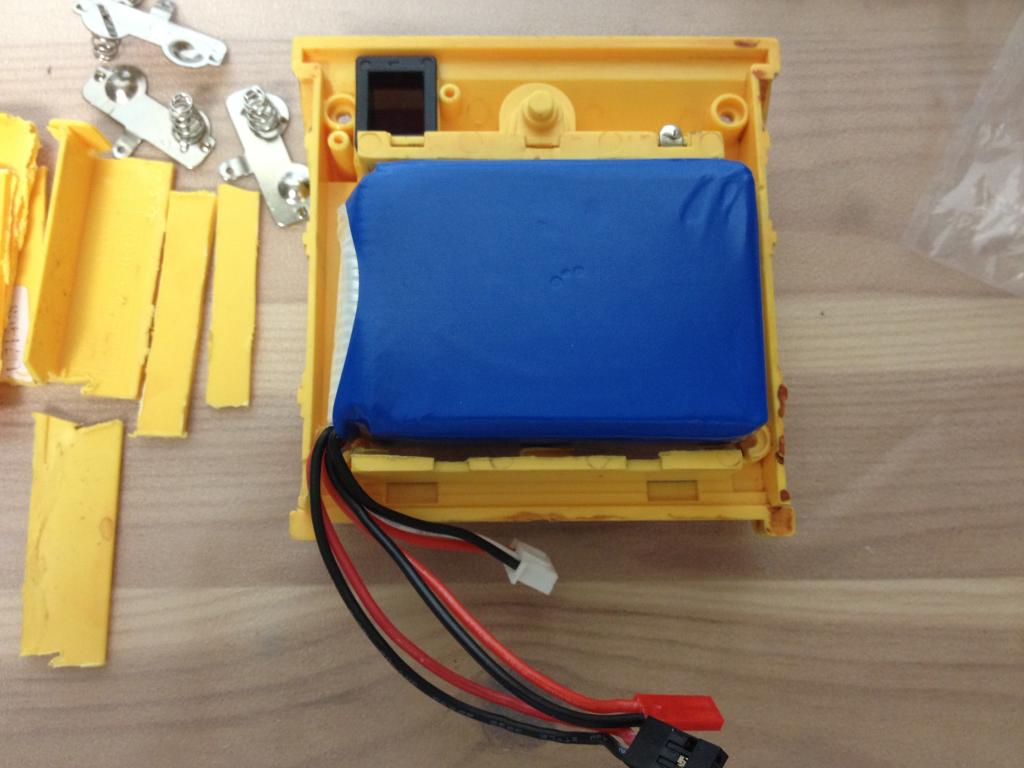
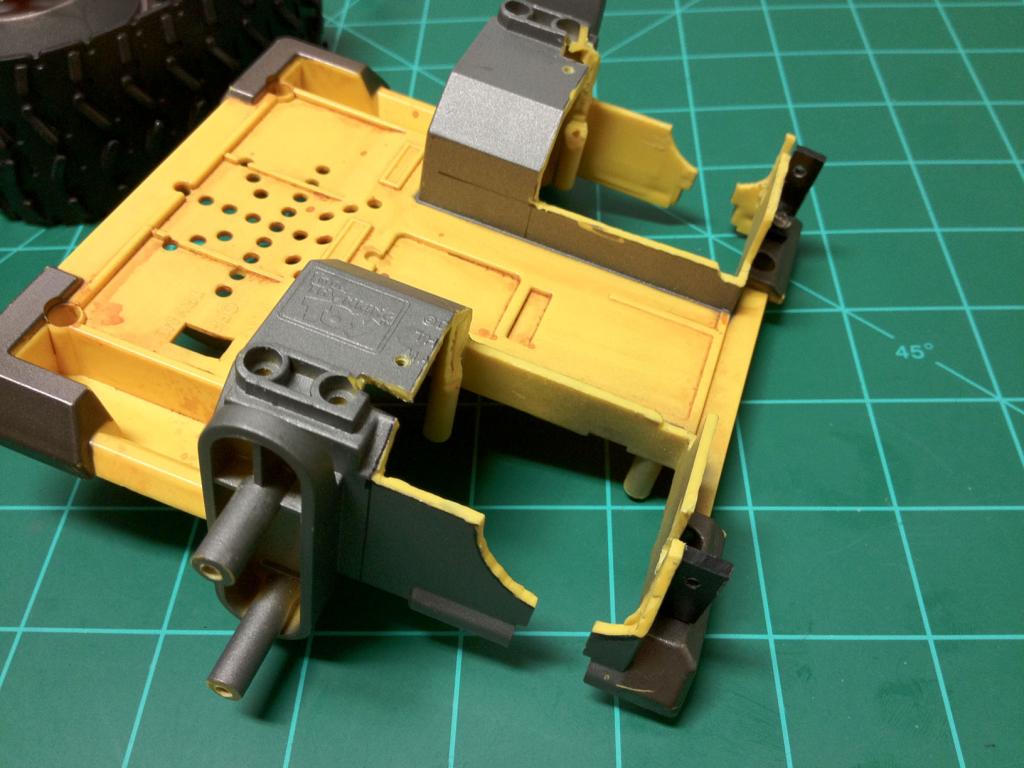
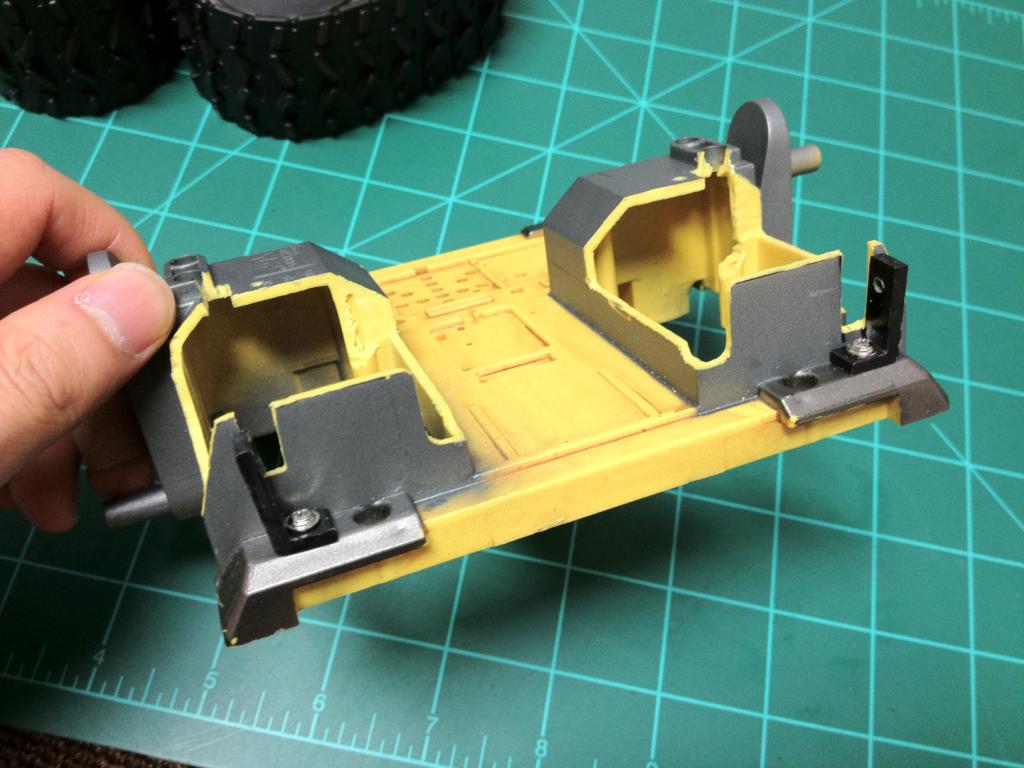
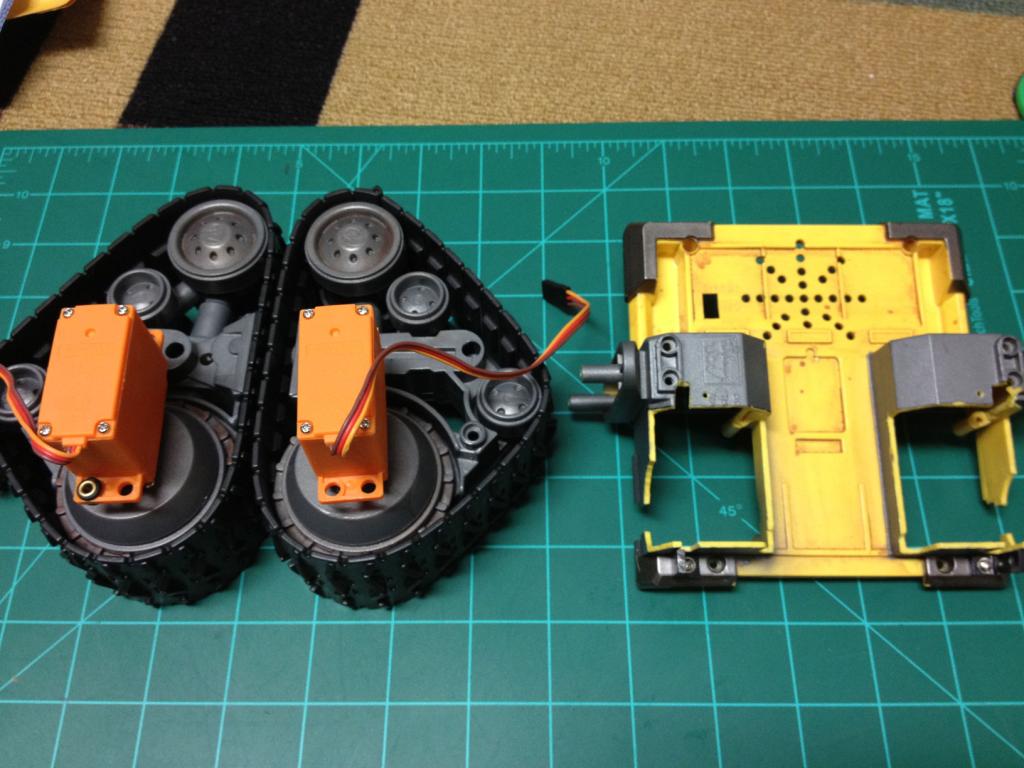
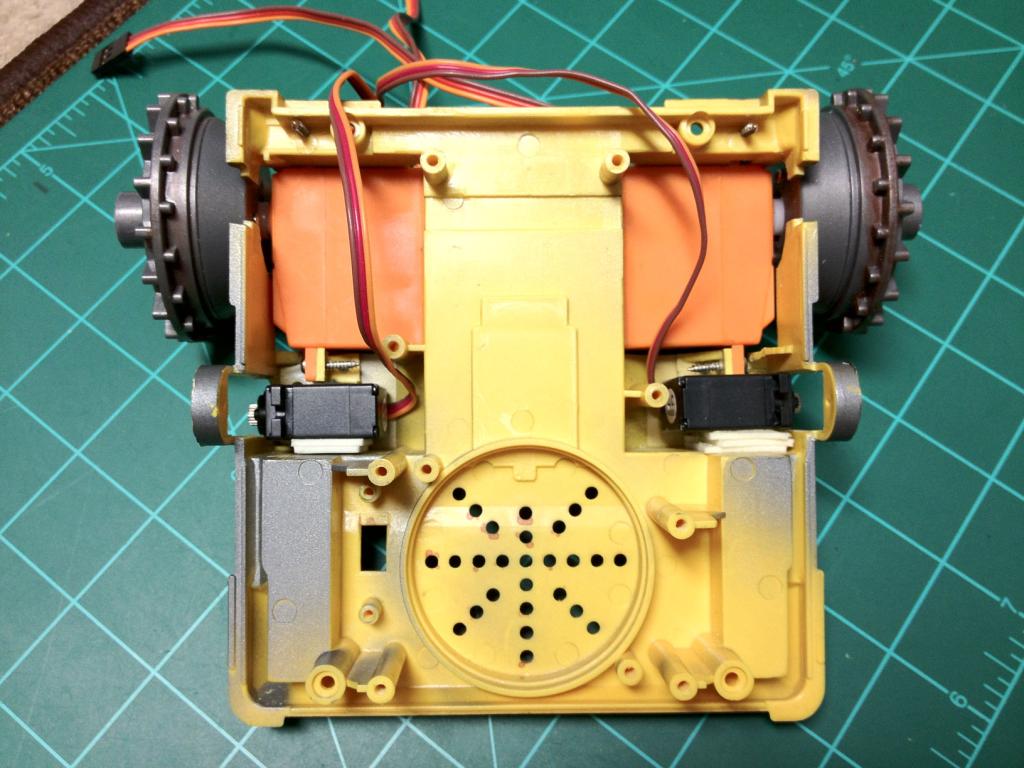
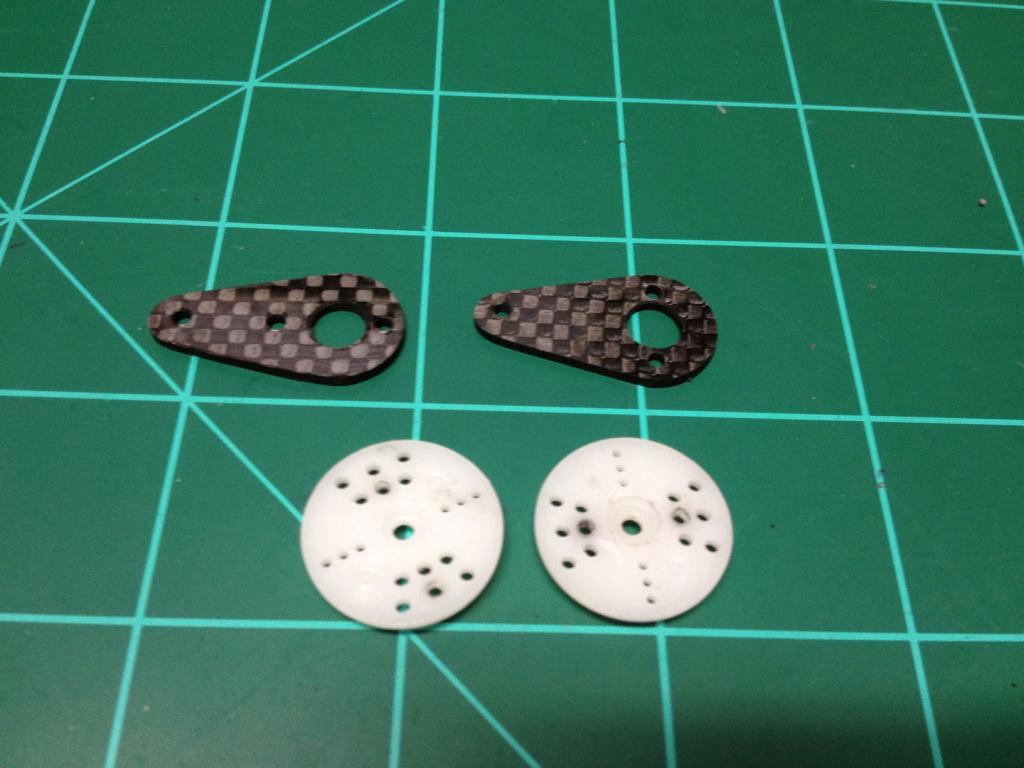
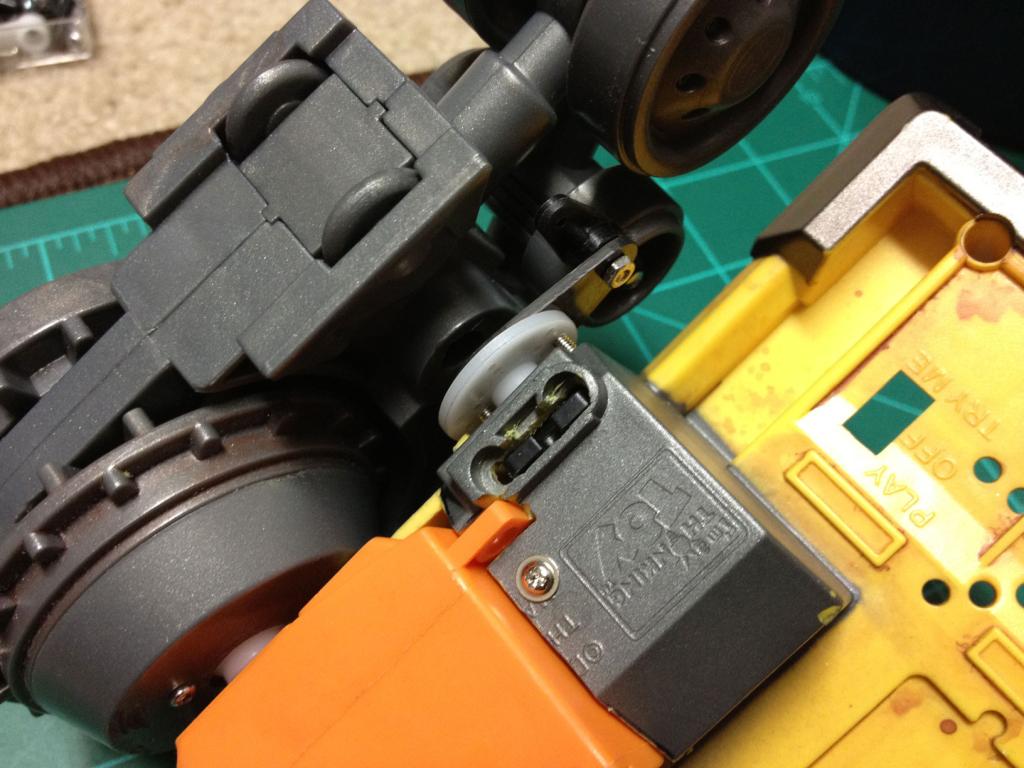
Inspired by DJ Sures and many other Wall-E projects on here, i decided it's time to make my own Wall-E and he will be my first robot build. I wanted him to be as lively as possible. I give credit to Joc's and Glickclik for the geared neck tilt and wheels tilt ideas, i just made it my own using the same concept. I still have yet to fully understand ARC so additional help would be greatly appreciated. Here is what im at so far in the project, some of the parts are hand made from raw Carbon Fiber with only a dremel and i use some parts from a 450 R/C heli as well as bearings in some of the joints.
Done so far:
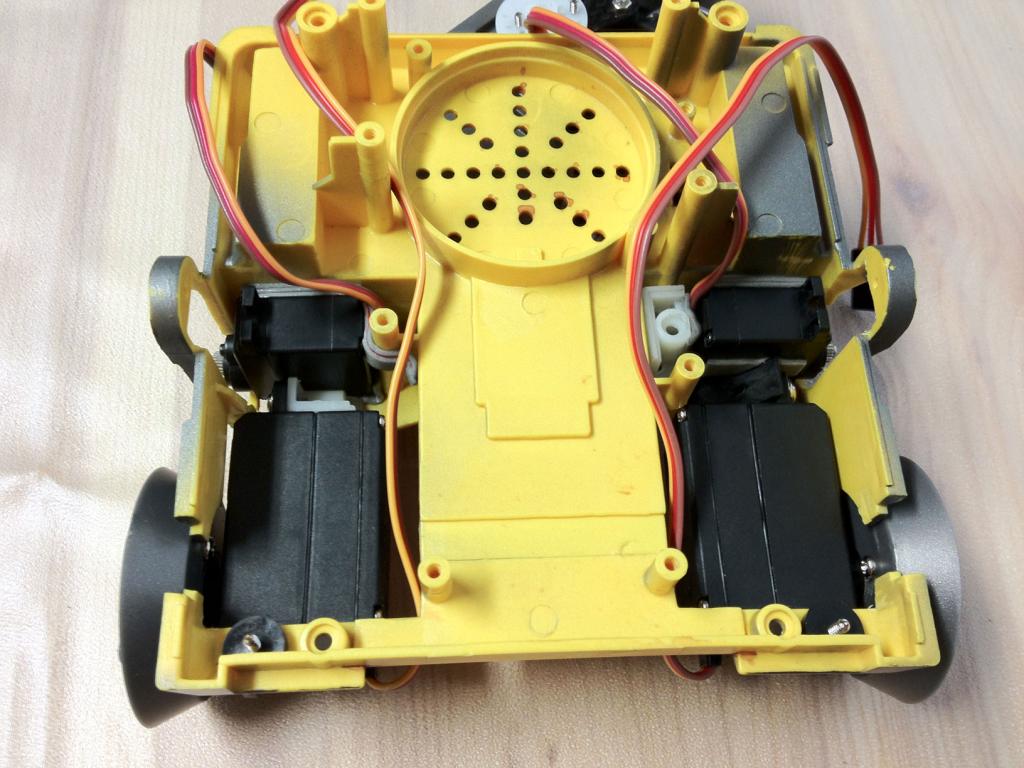
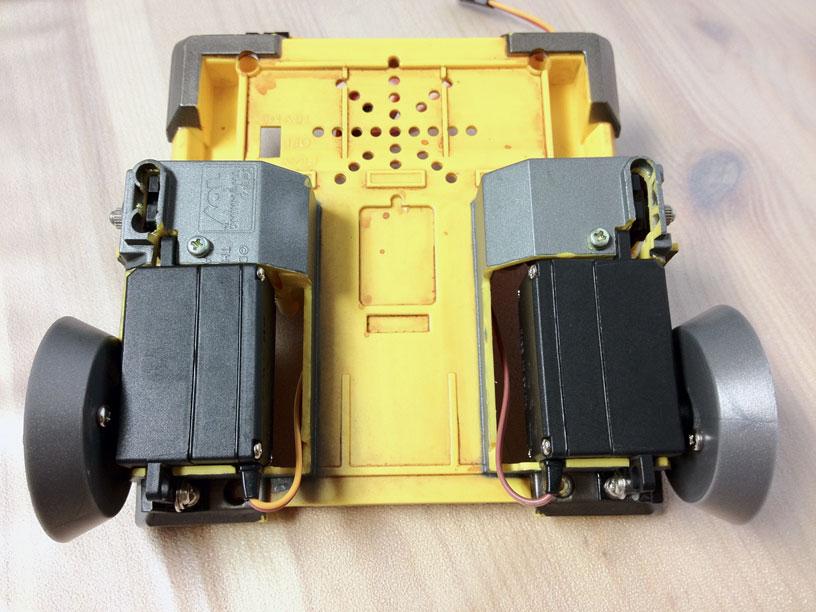
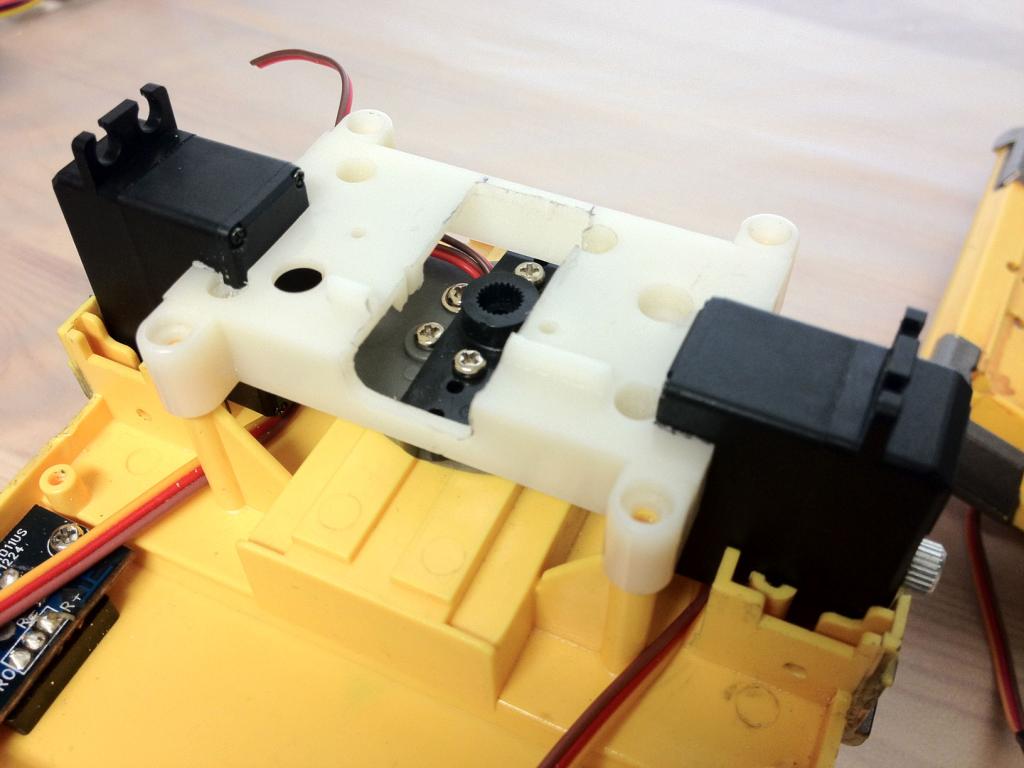
Metal gear high speed modified continuous servos for wheels.
Micro metal gear servos for wheels tilt.
Mini metal gear servos for vertical arms movements.
Micro servos for horizontal arms movement.
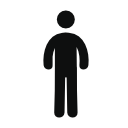
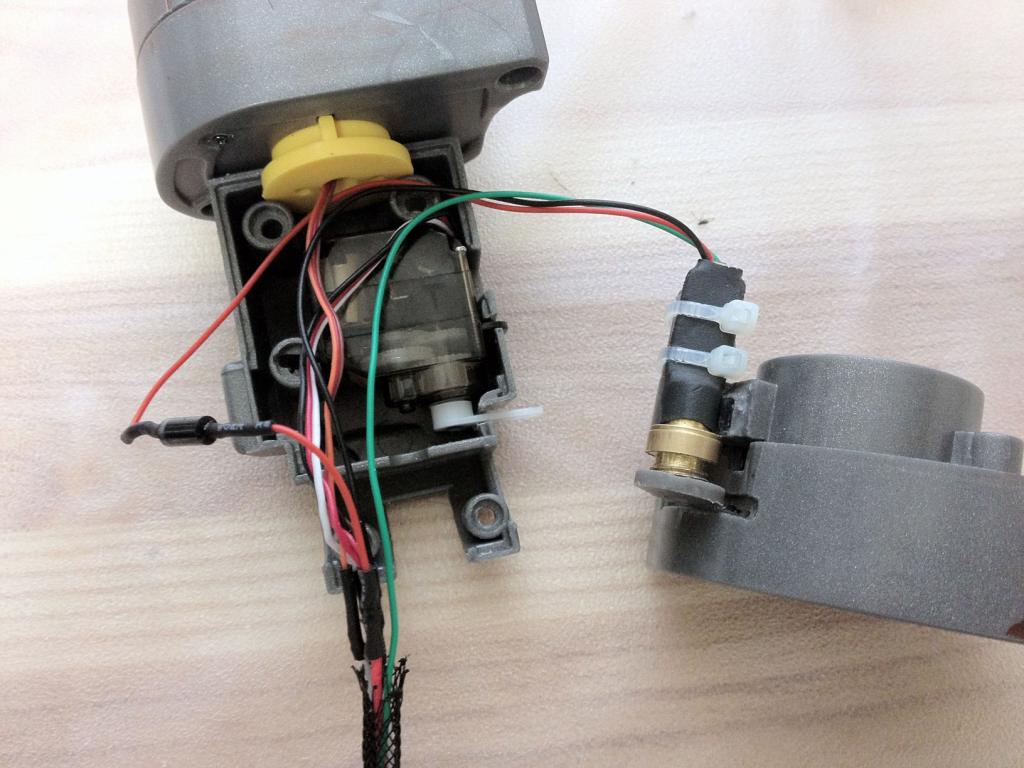
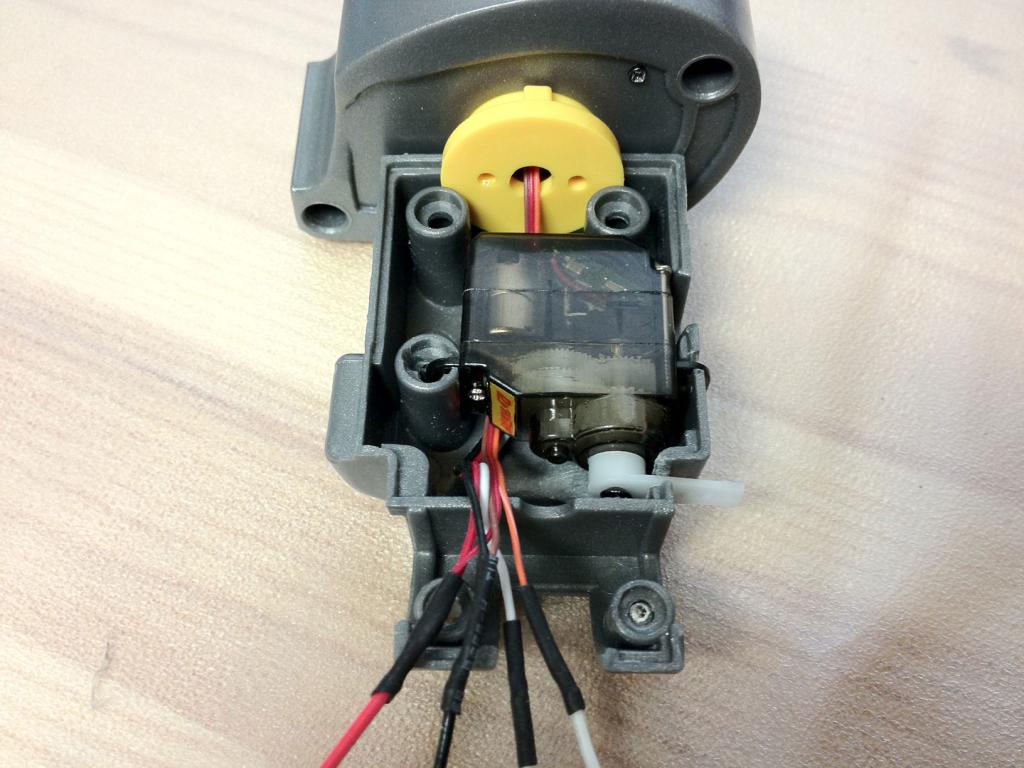
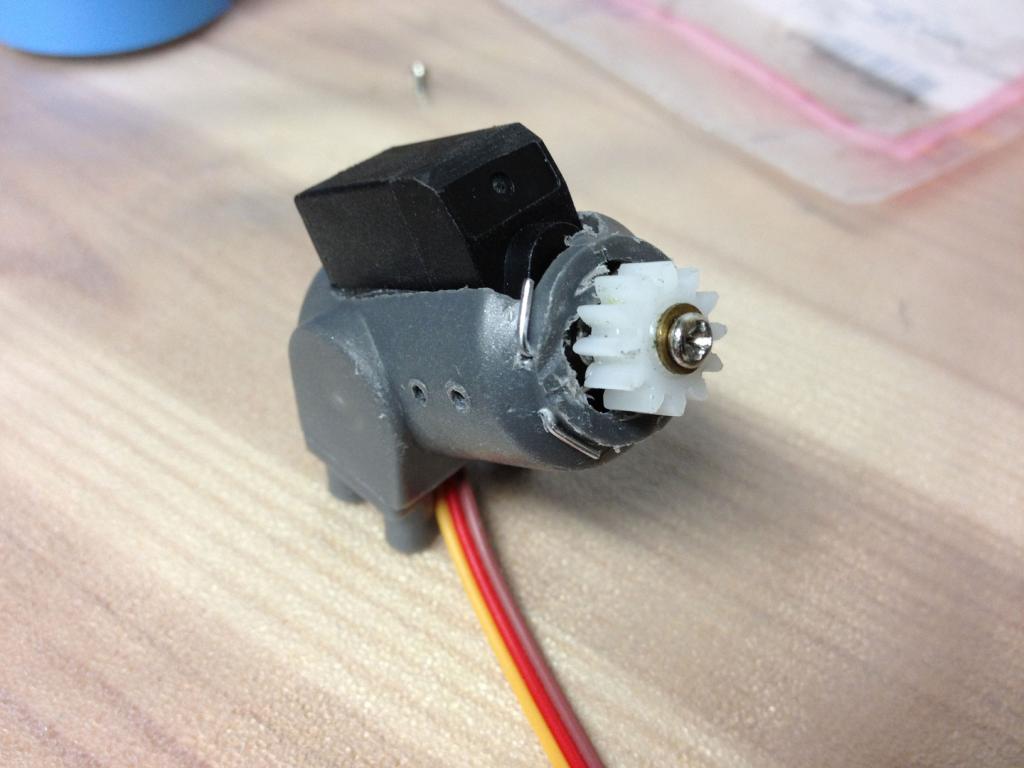
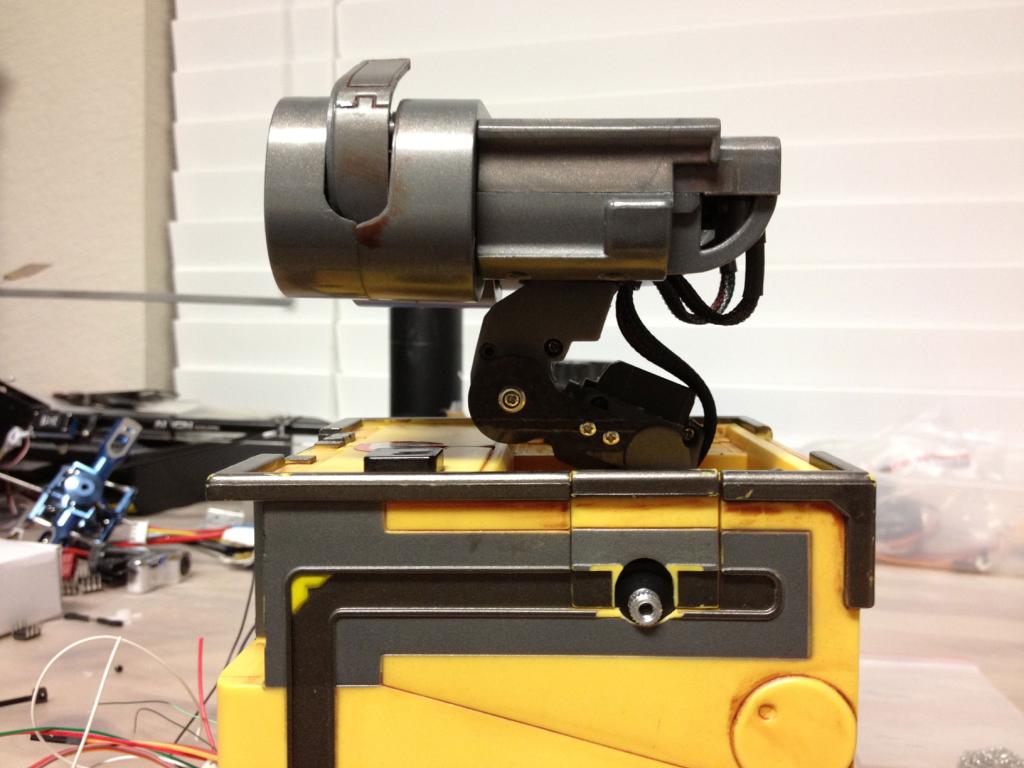
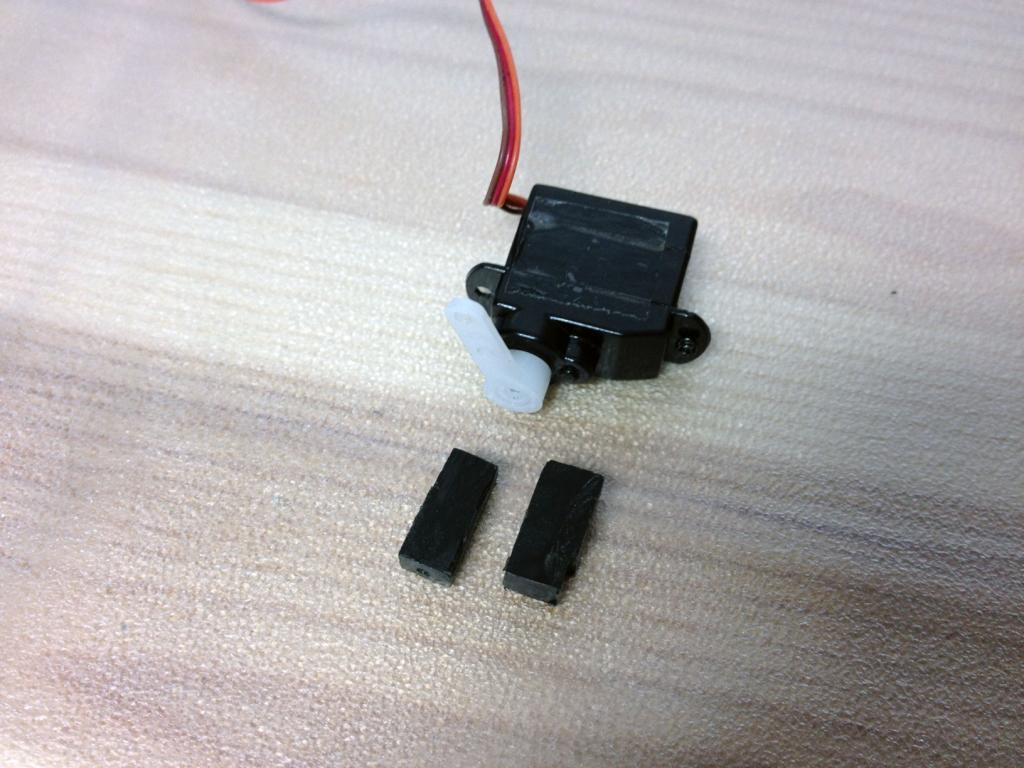
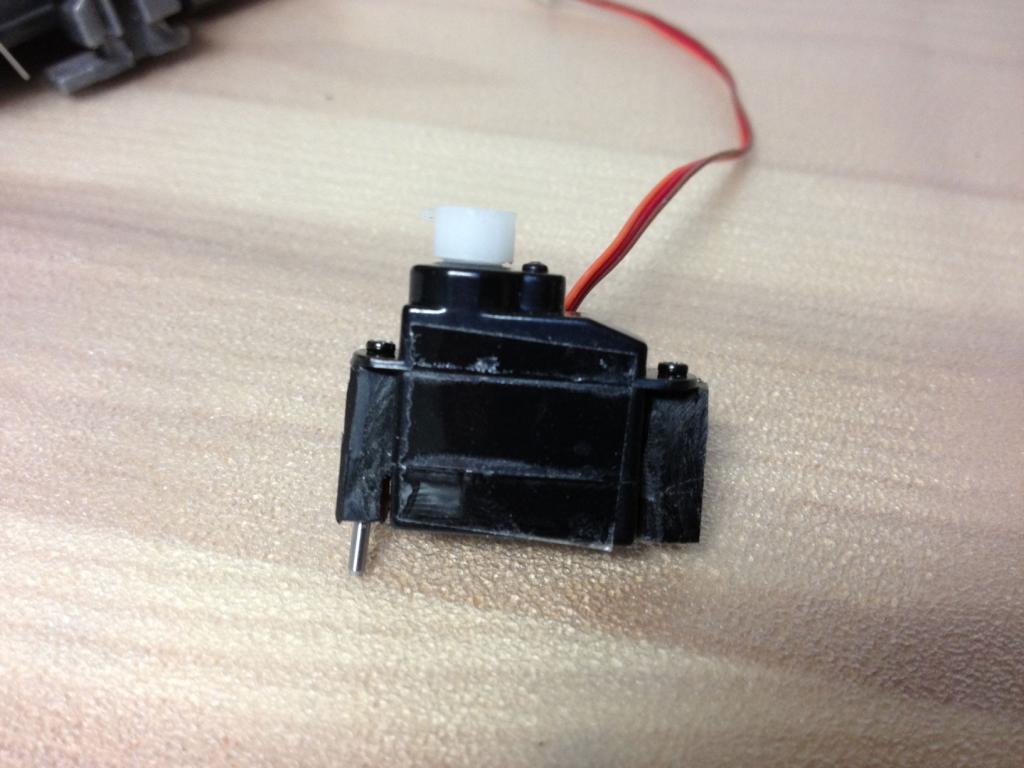
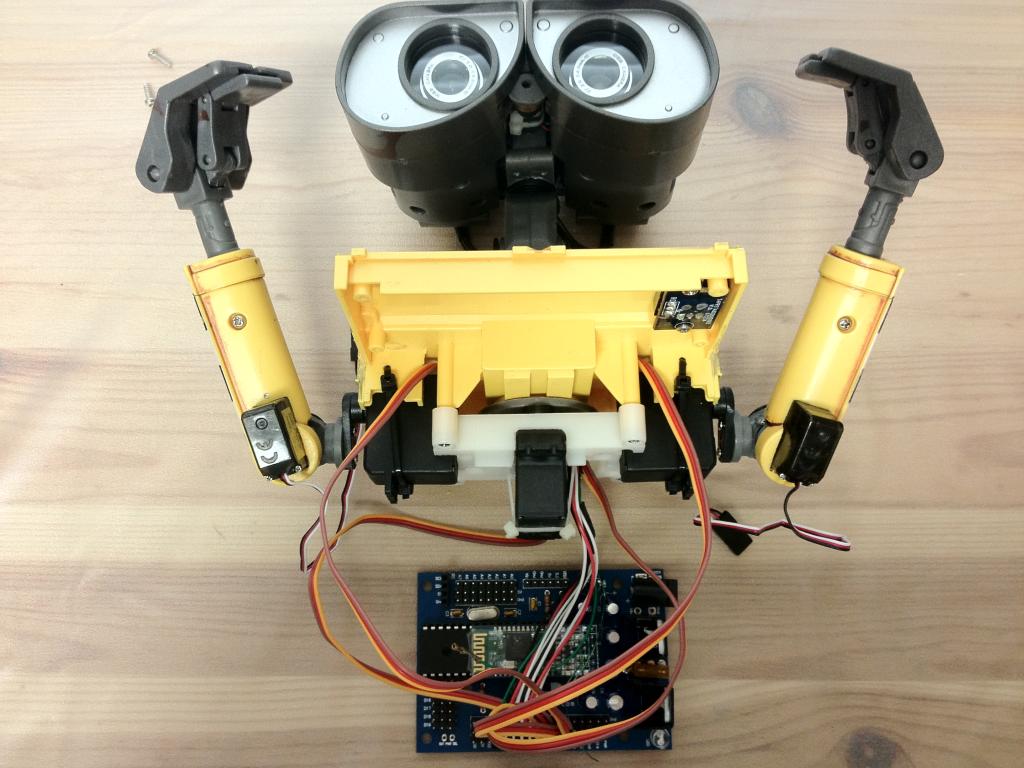
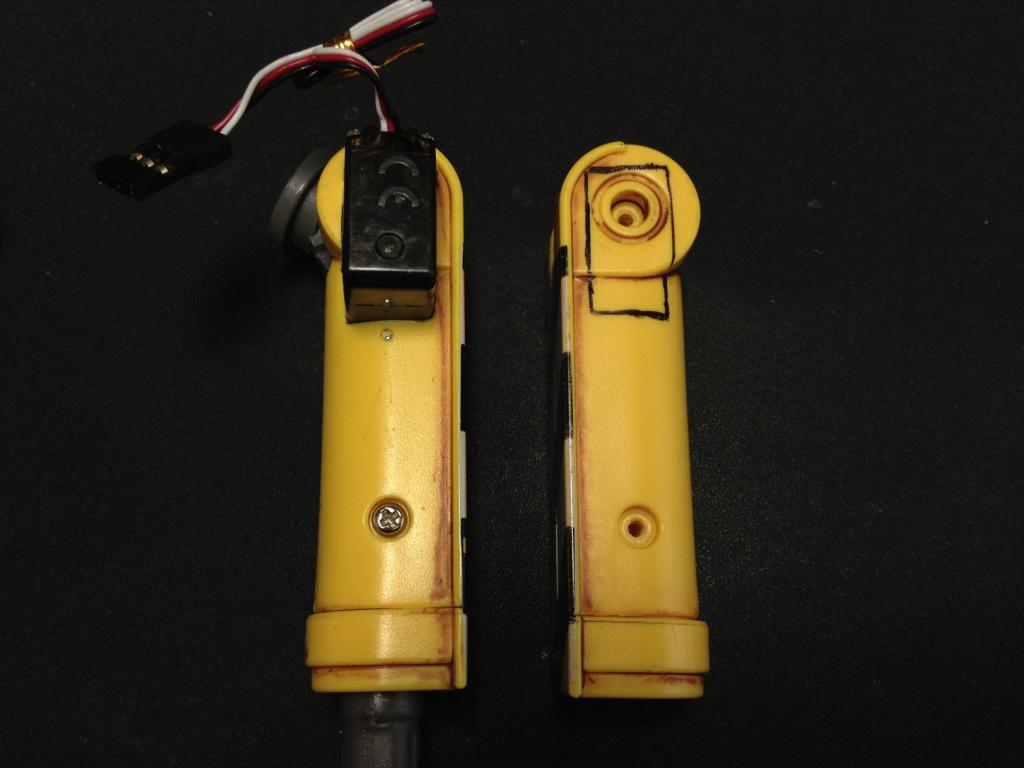
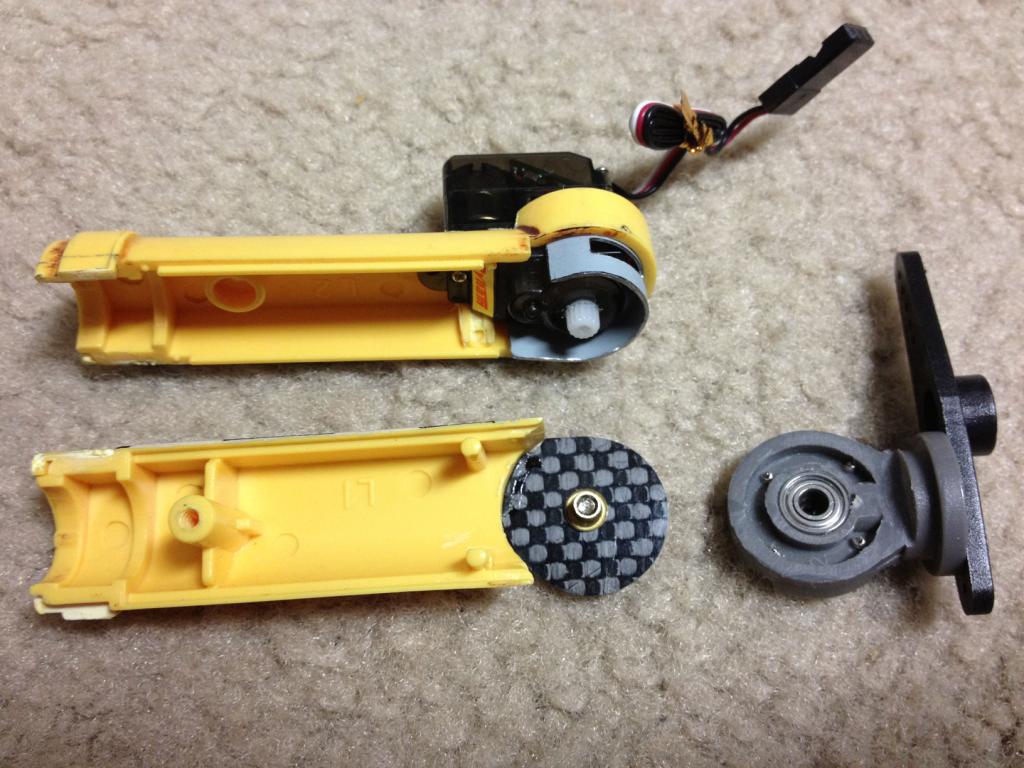
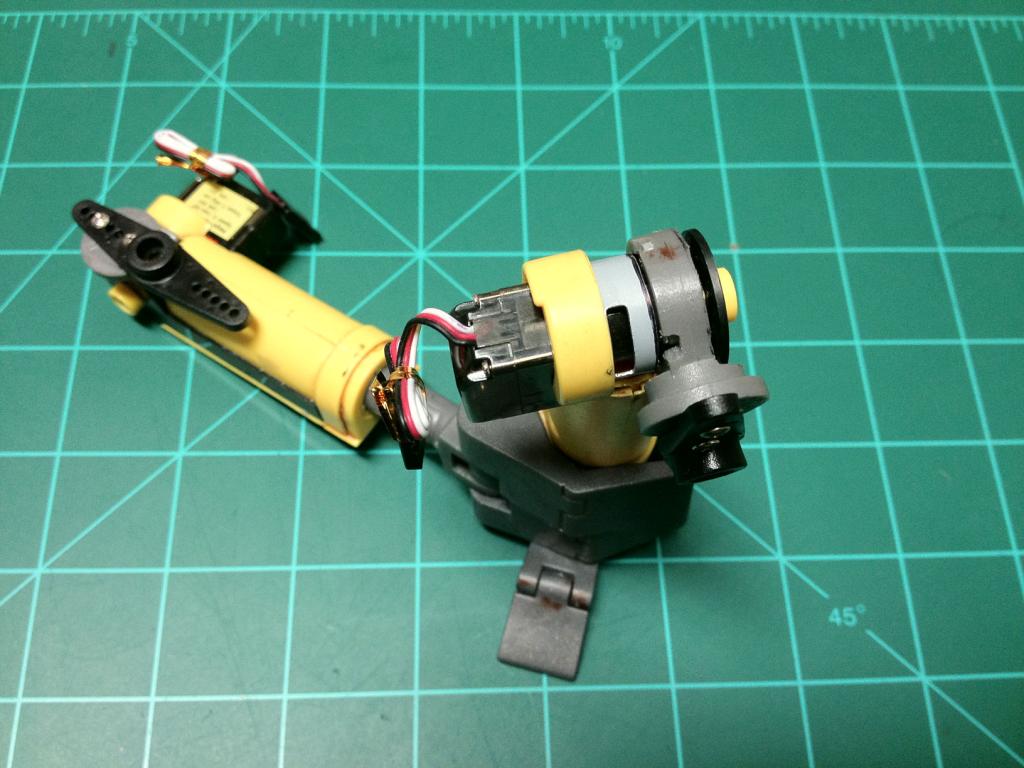
Micro metal gear servo for vertical neck tilt.
Mini metal gear servo for horizontal neck movements.
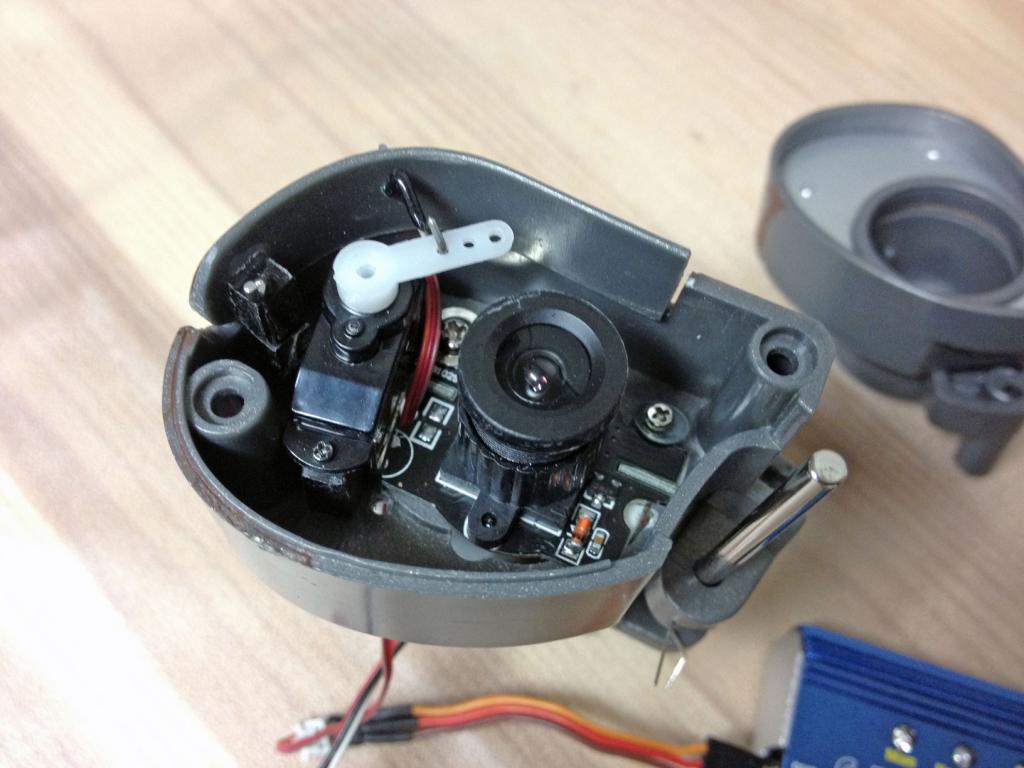
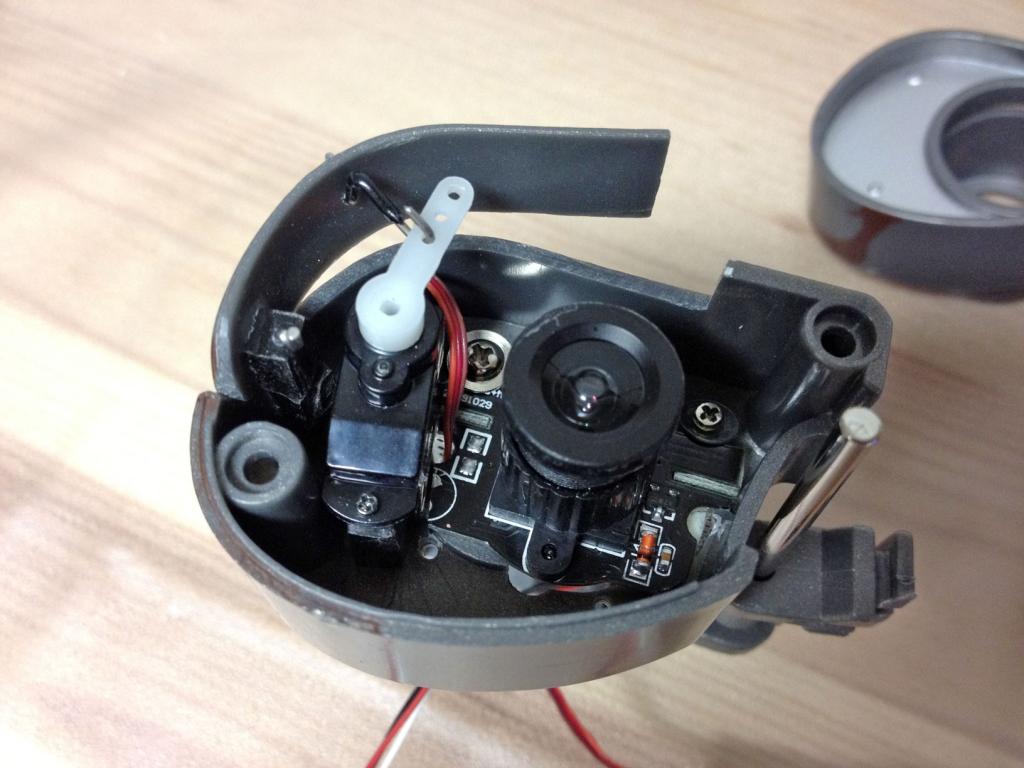
Micro servos for individual eye movement.
Sub-micro servos/mods for eye's lid animation.
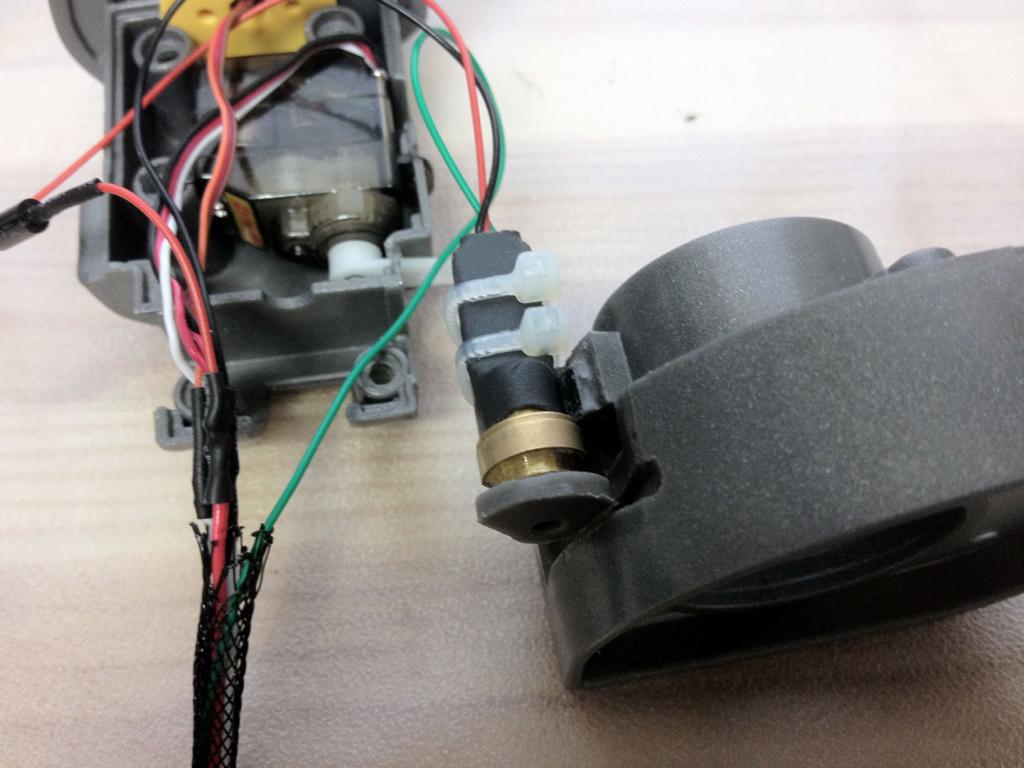
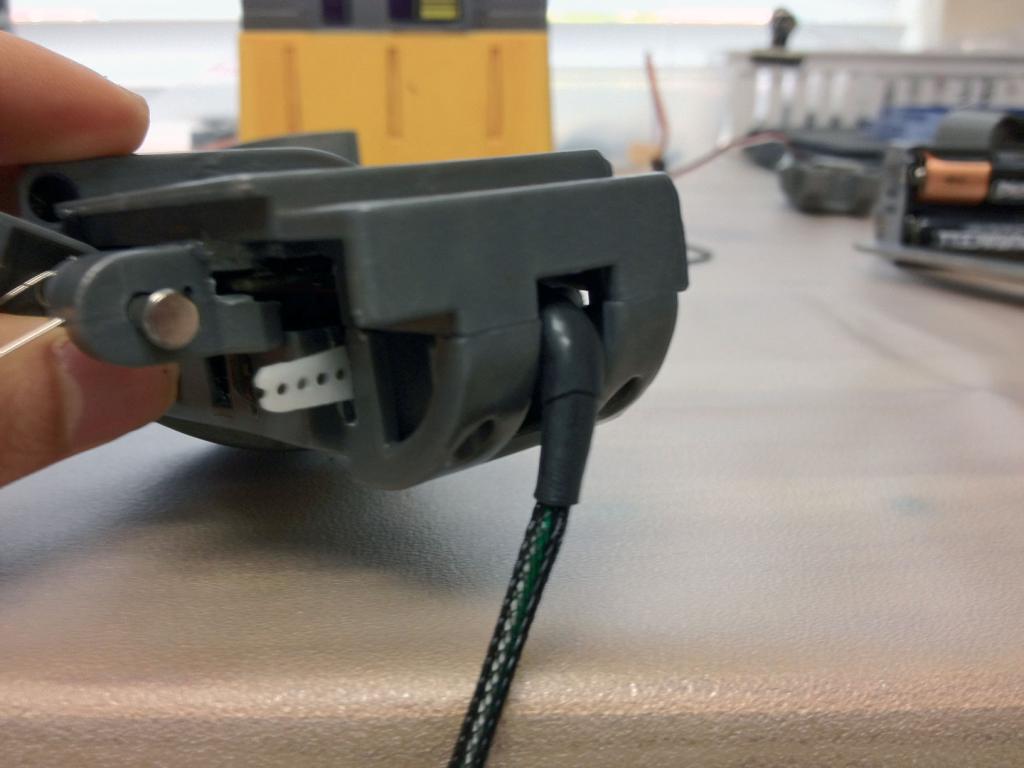
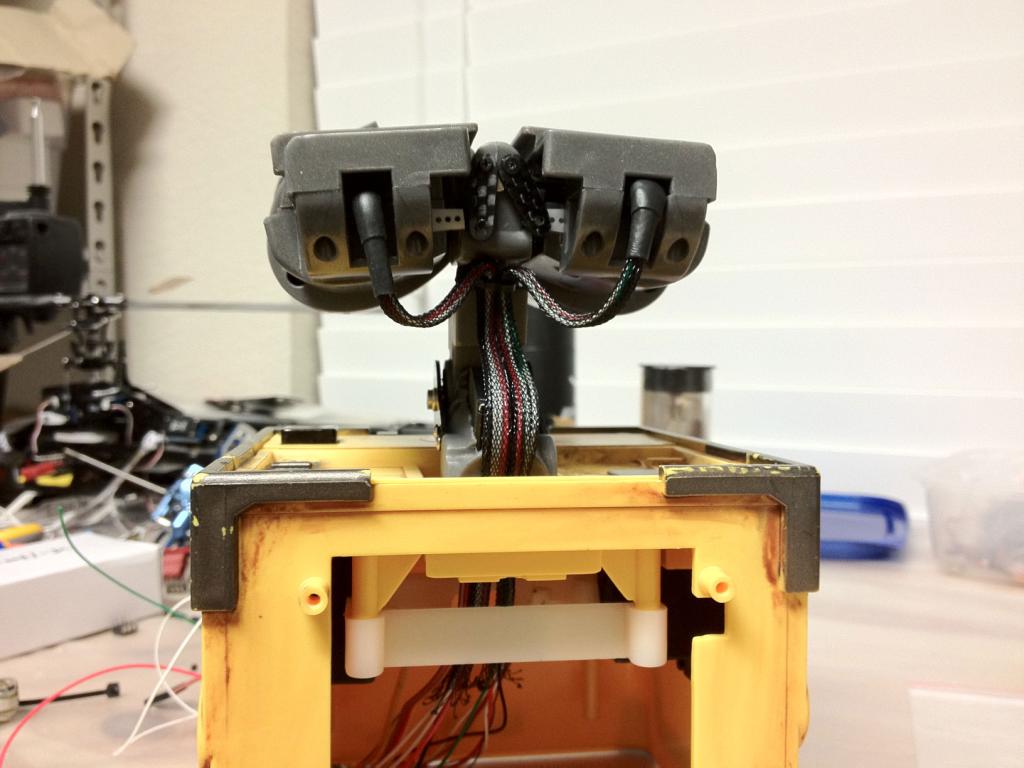
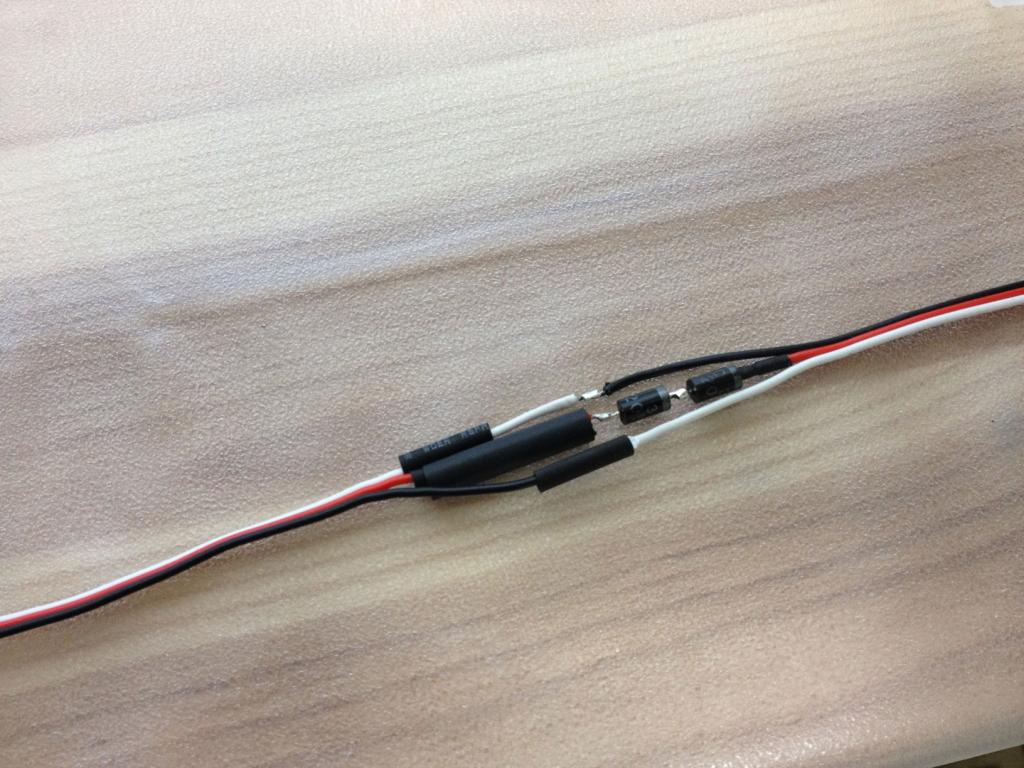
Get rid of dummy cables in the head, run all servos/camera wires from head down the same way and use heat shrink/black nylon mesh for realistic look.
Red laser between eyes.
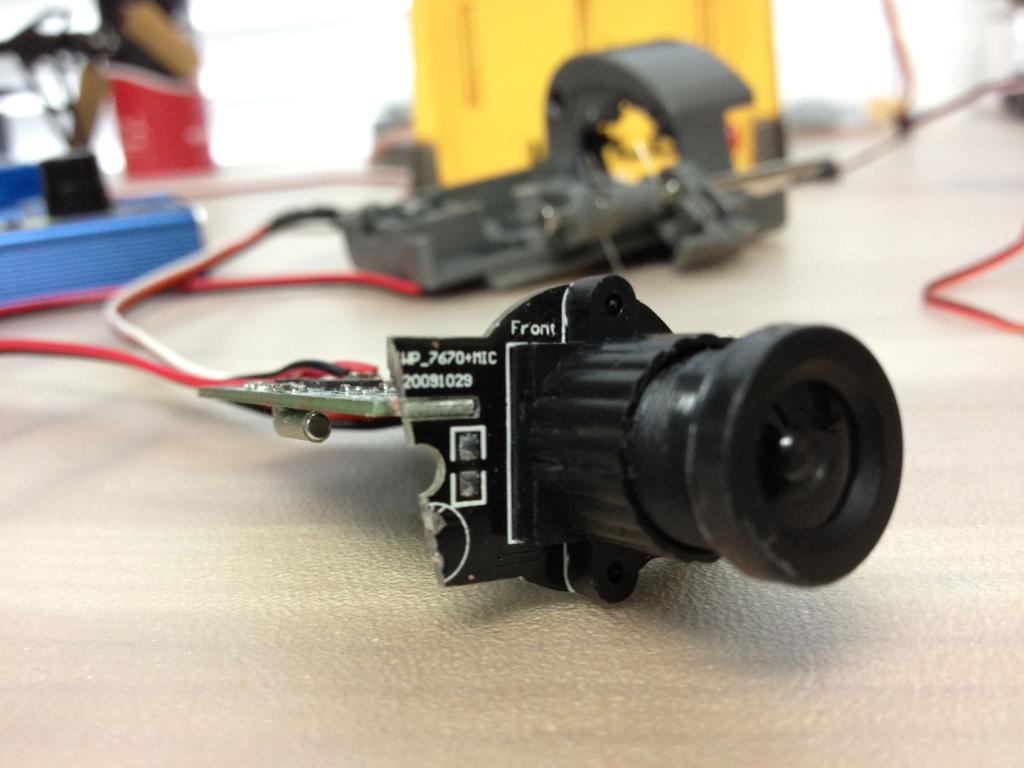
Mock up left eye's lens.
Other things to be added/changed as i go
Yet to be done:
Light up solar panel (most likely, still thinking) Red LED in front in the black spot next to the solar panel (definitely) Make his wrist rotate (don't know yet, still thinking)












Discover more robots

Rb550f's Ez Robot Rover V2

Ezang's ARC - A Short Video - My Tank Base Robot - DC...


controlcommand is going to be a usefull tool....esentially any wondow opened within the software can be turned on off pause on pausaed off anything....
I understand but im trying disable a function within the Relative servo window "Response to movement for external controls", i don't think there is any ControlCommand for that, can't find it.
The next version of ARC will allow you to pause and unpause the relative servo control
oh gotcha...
Might be out tonight - not sure yet. There is a big new feature i'm adding and it's not fully done yet.... But i'm working on it
@DJ, That's awesome! I also found a problem but not really sure if it's a bug or if it's suppose to be this way. When i set the speed of the servo, after the script ran, the speed is kept in memory, when i run another script with the same servo, that servo is using the speed set in the previous script so moving slow instead of regular speed.
Update: Found another problem, sometime wall-e head will move up and down correctly but sometime it goes all the way down pass the limit i set which i don't want. I'm not sure of the reason. I'm going to make a short clip to show you that in a moment.
Here is the video:
I used both Relative servo and code below, note that i have to reset servo speed at the end of the script, if not when i says Wall-E look up after this script ran, he will move up slowly and not the normal speed, not sure if this is a bug or not.
The limits are per control basis. So if you set a limit in the servo settings, the camera does not use that same limit. This is each control can have it's own limit for it's own behaviour.
The servospeed is meant to work that way. Setting the speed of a servo is global until you set it again, or reboot. Much like if you set the status of a digital port, or the position of a servo. It's global.
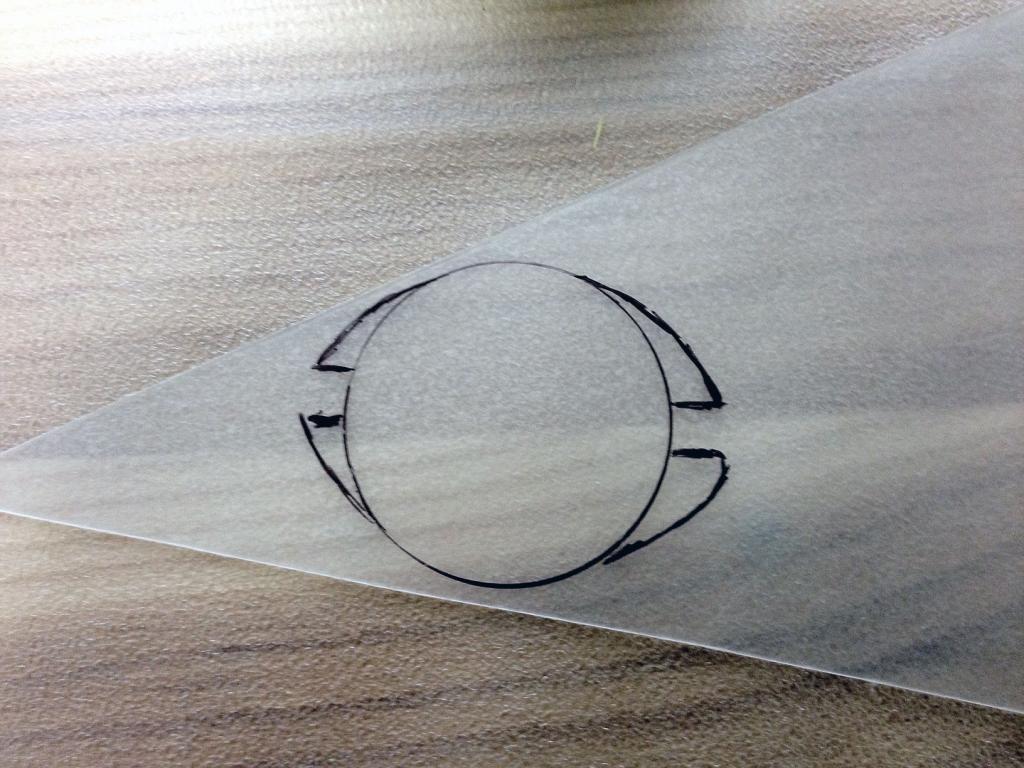
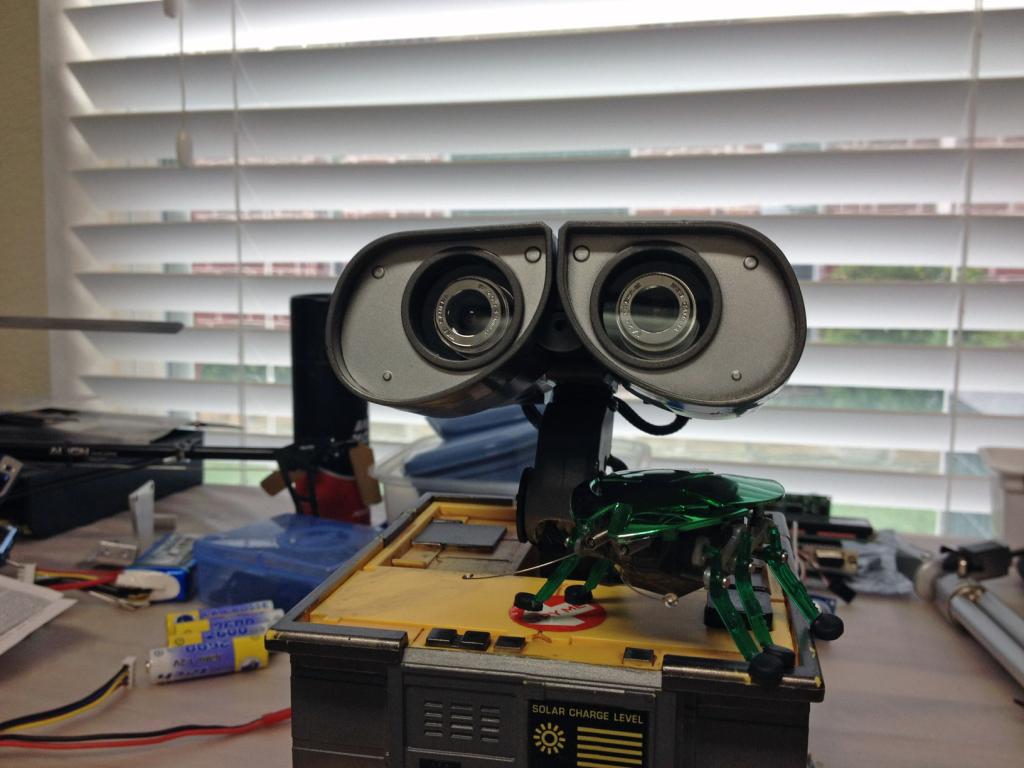
I forgot to update these pics last week i made the lens cover for Wall-E eyes. These are made from thin lexan sheet and i cover the front with iPhone screen protector cut out because lexan can get scratched up easily.
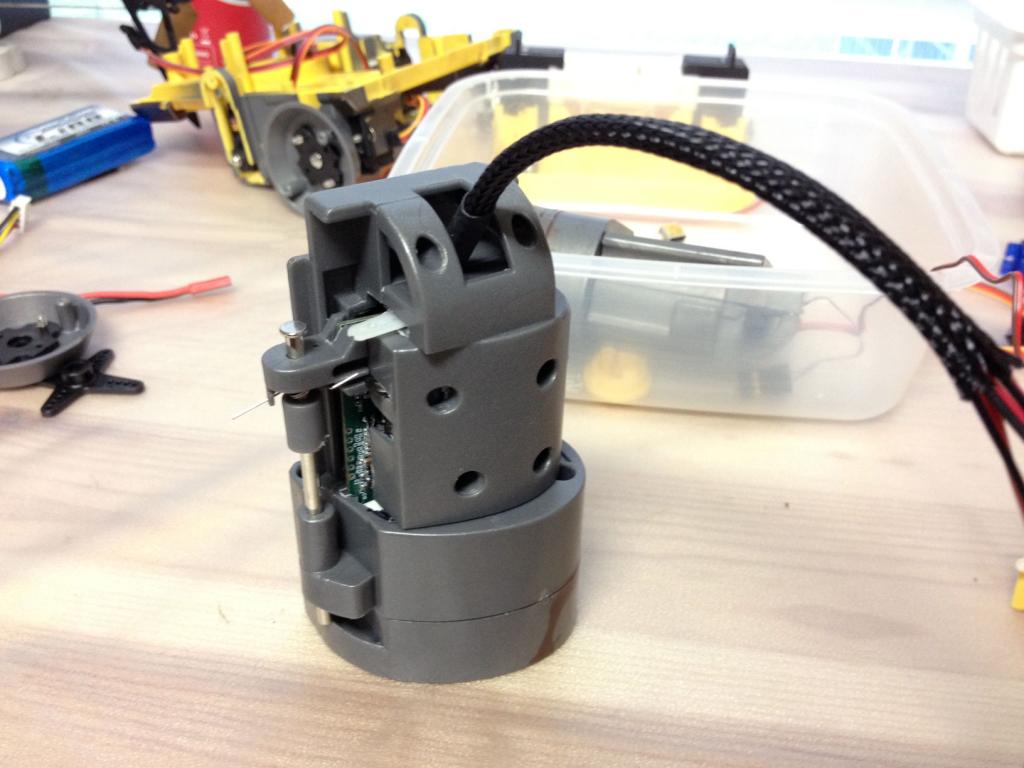
I ran into a small problem, the screws holding the two carbon fiber neck pieces together keep unscrewing after a while, need to find a way to keep them in place, i think they screw may be too long that it push itself out due to all the vibration from movements.