




























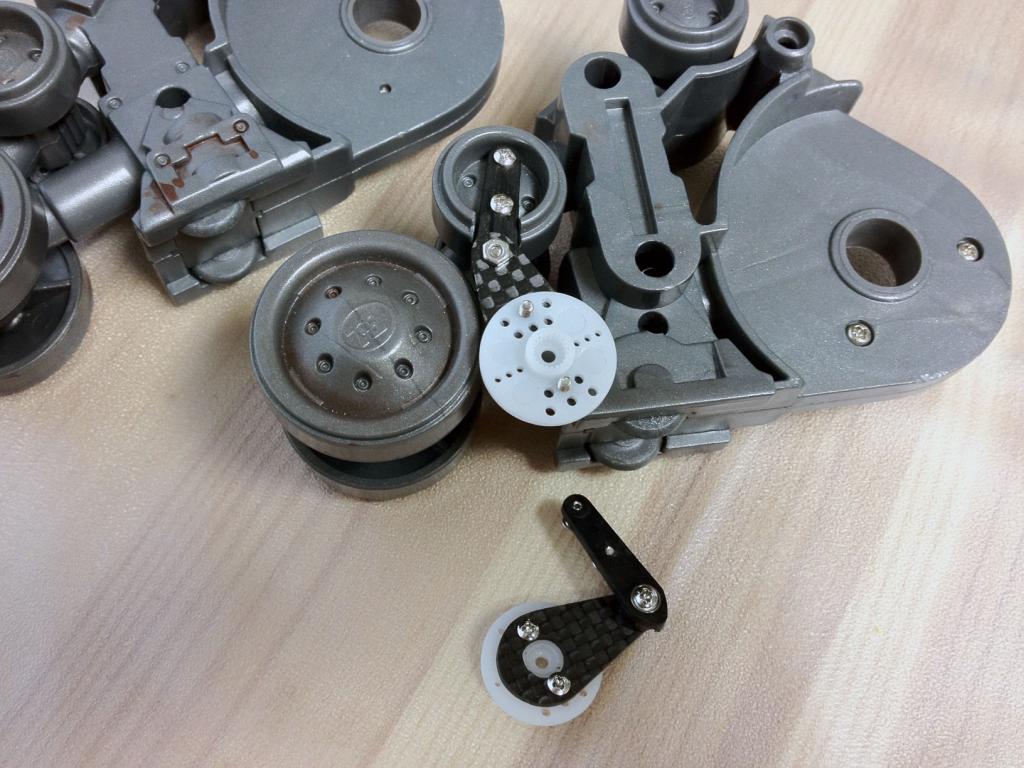
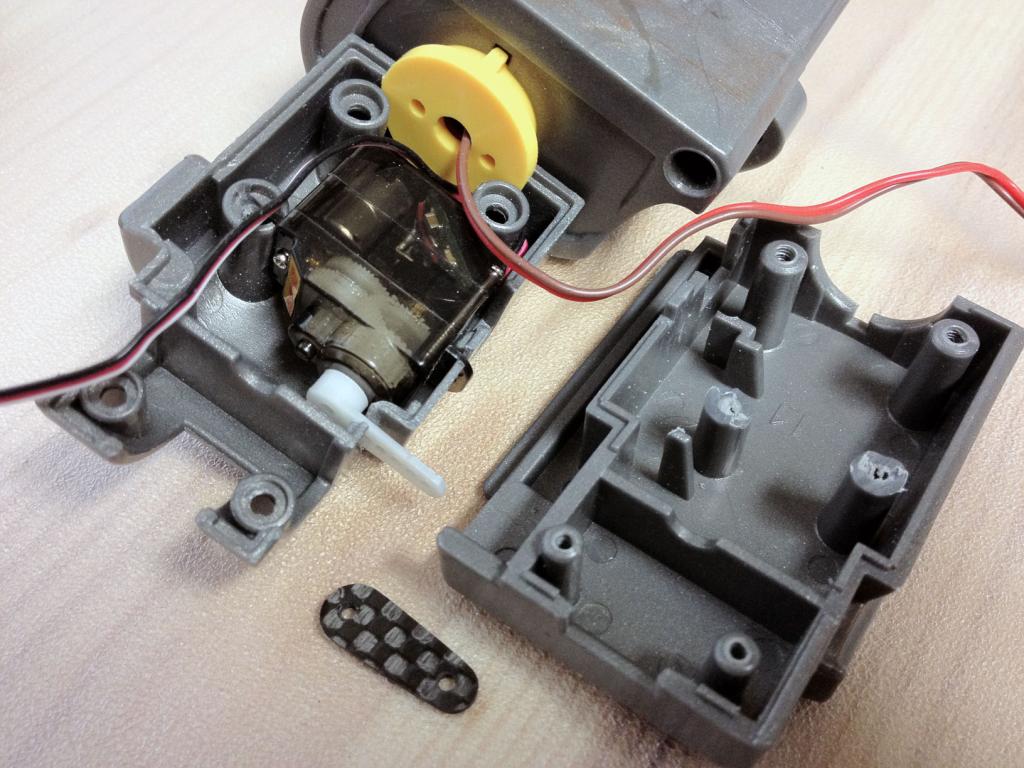




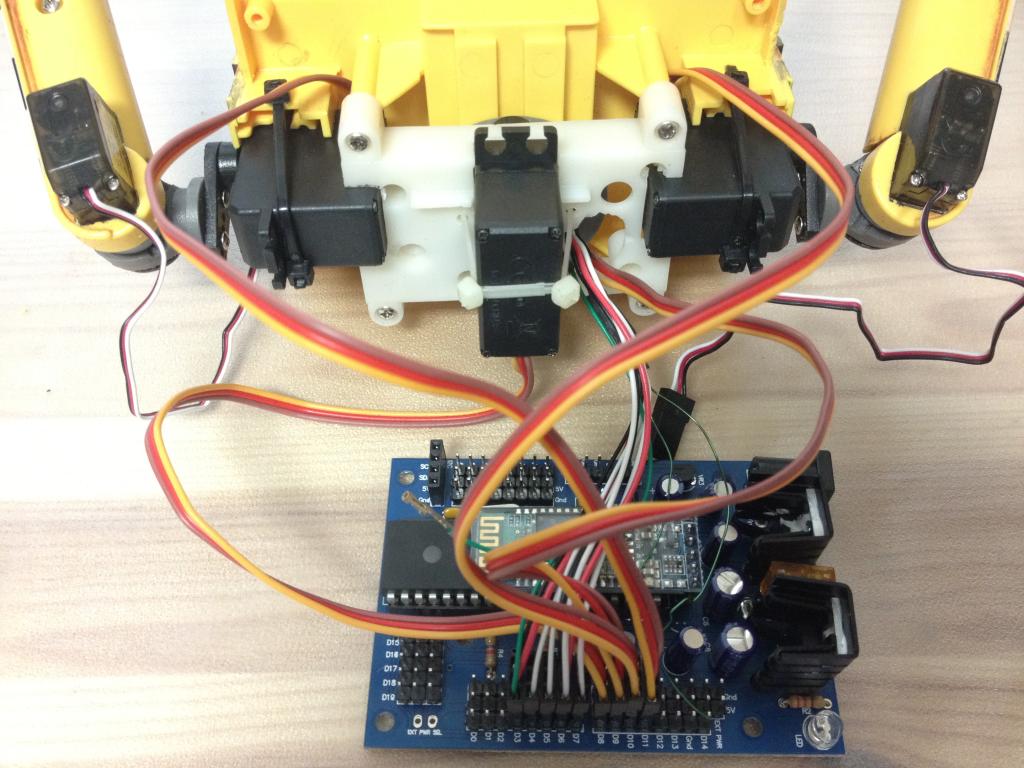
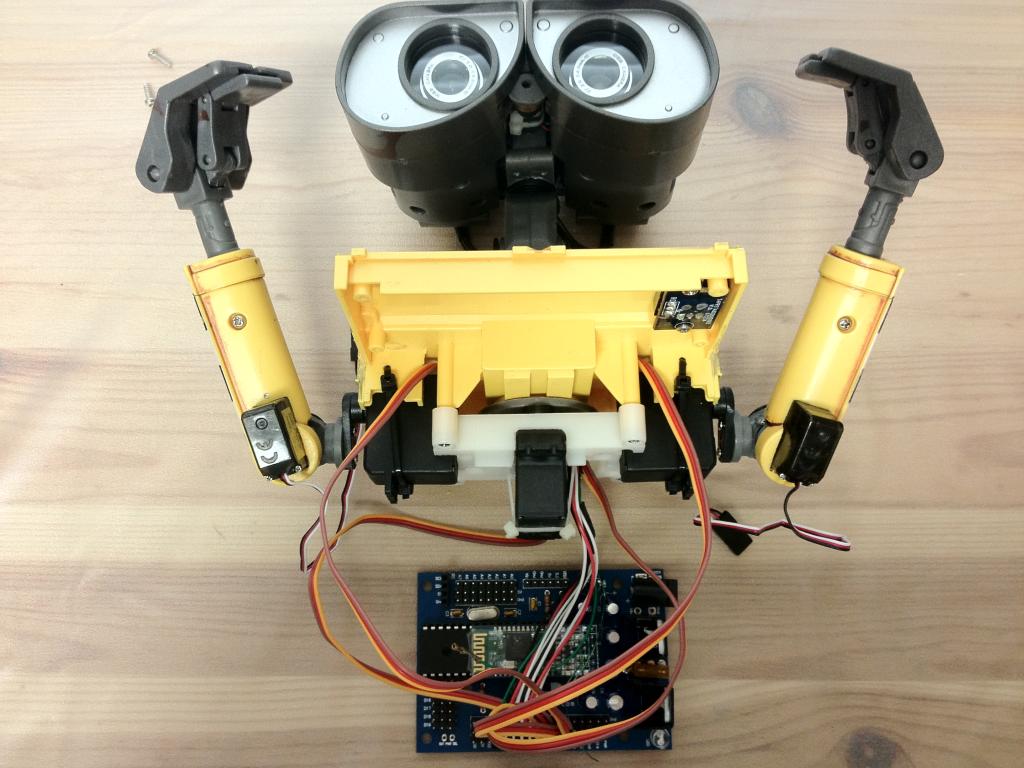
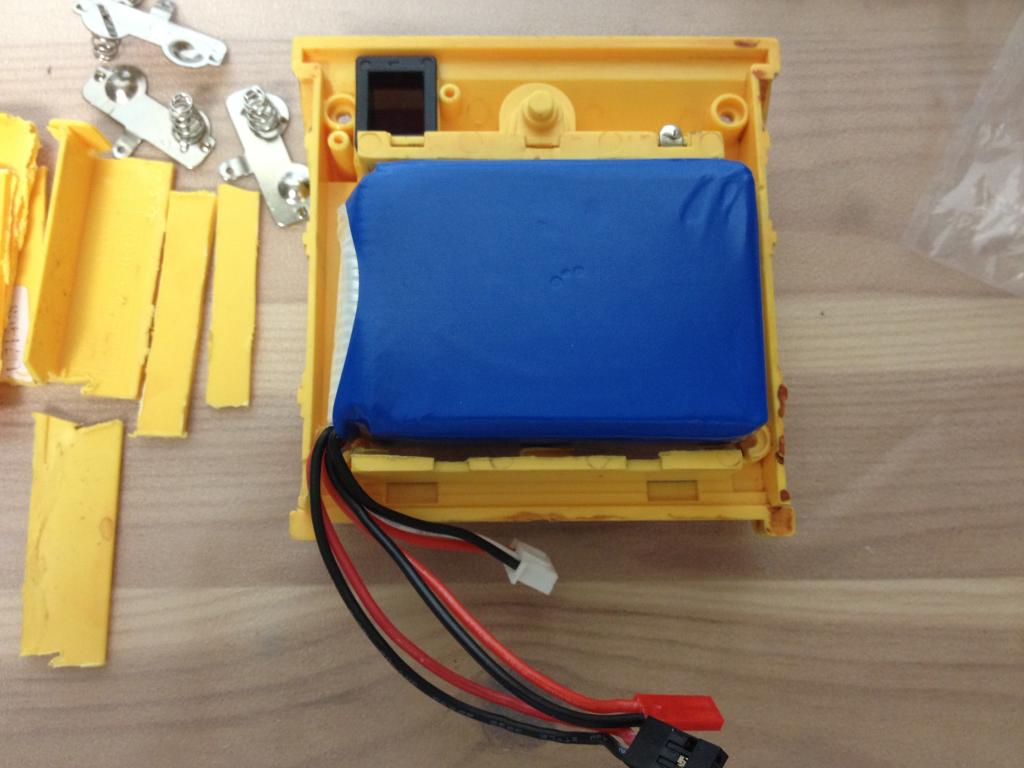
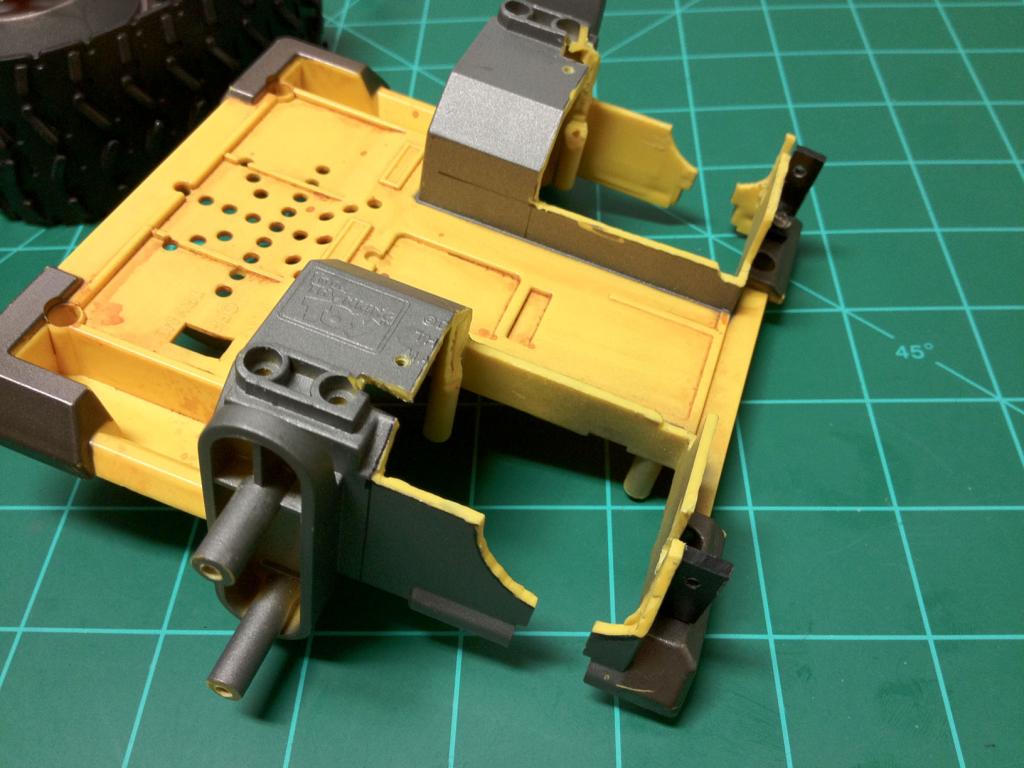
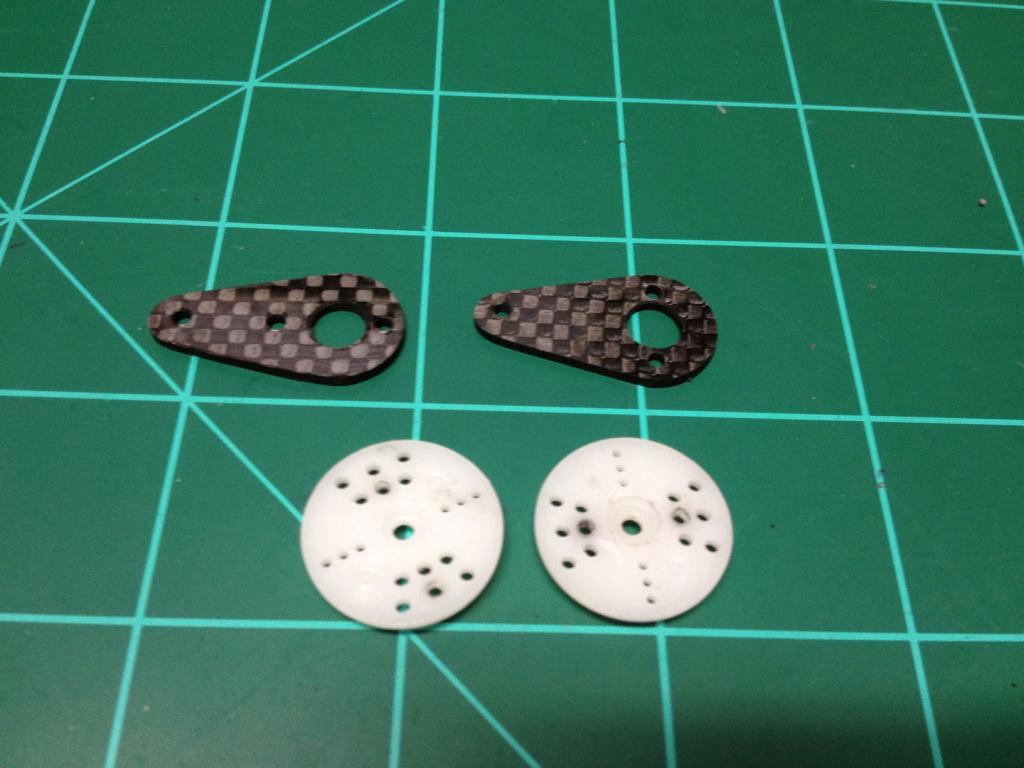
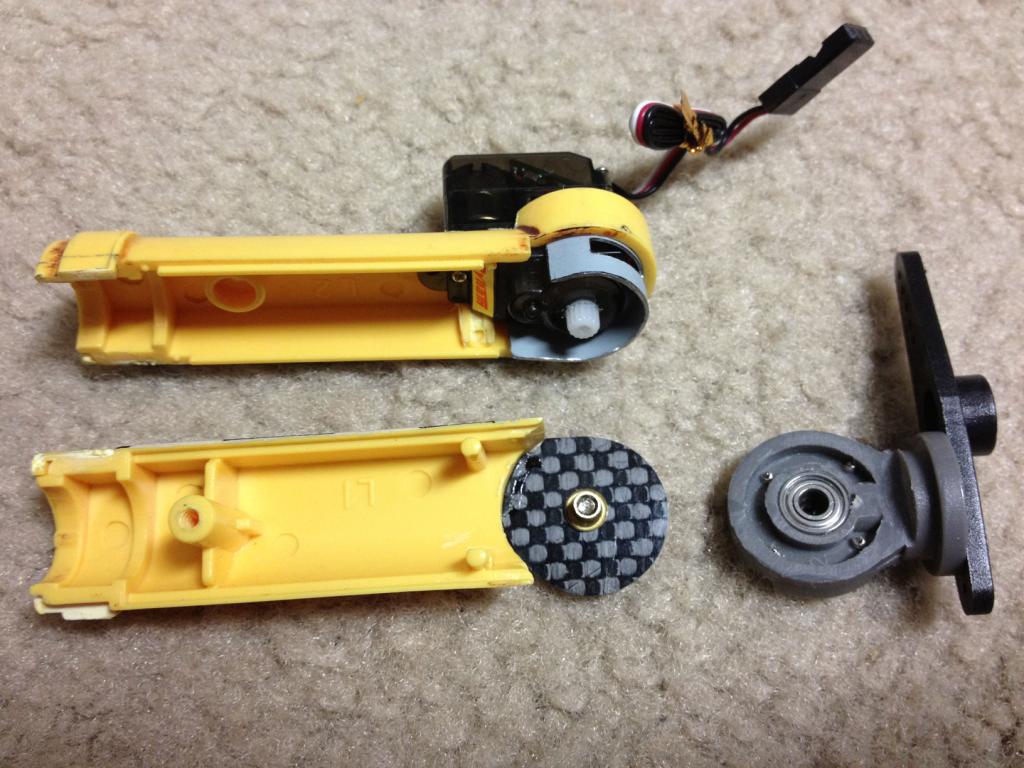
Inspired by DJ Sures and many other Wall-E projects on here, i decided it's time to make my own Wall-E and he will be my first robot build. I wanted him to be as lively as possible. I give credit to Joc's and Glickclik for the geared neck tilt and wheels tilt ideas, i just made it my own using the same concept. I still have yet to fully understand ARC so additional help would be greatly appreciated. Here is what im at so far in the project, some of the parts are hand made from raw Carbon Fiber with only a dremel and i use some parts from a 450 R/C heli as well as bearings in some of the joints.
Done so far:
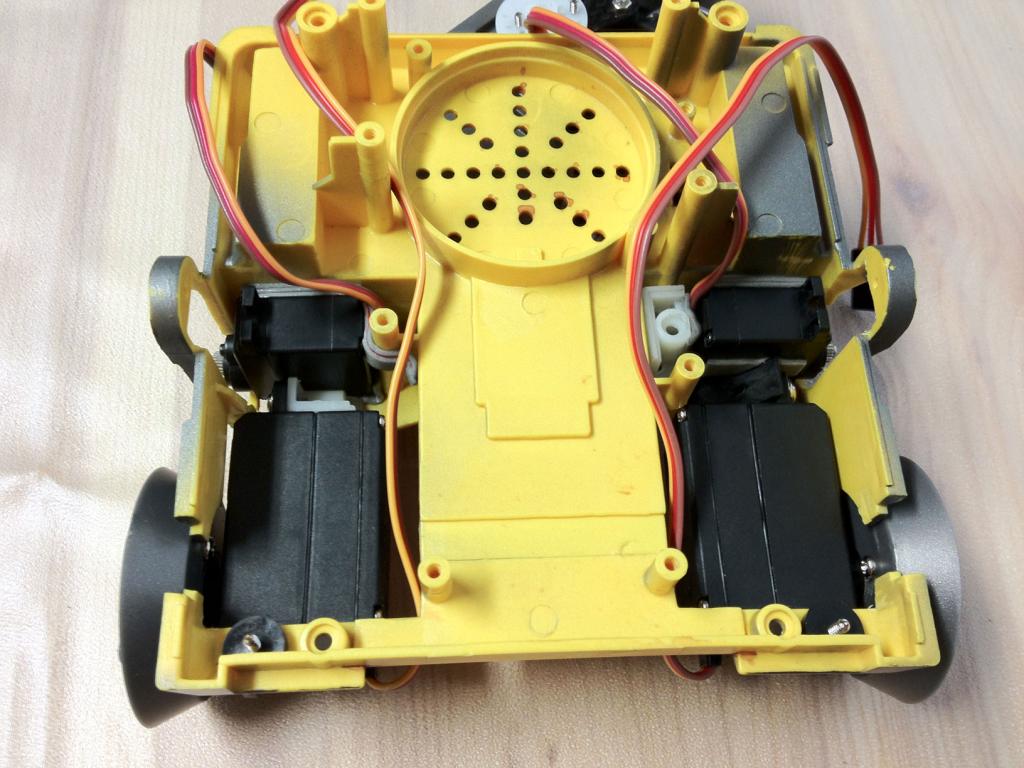
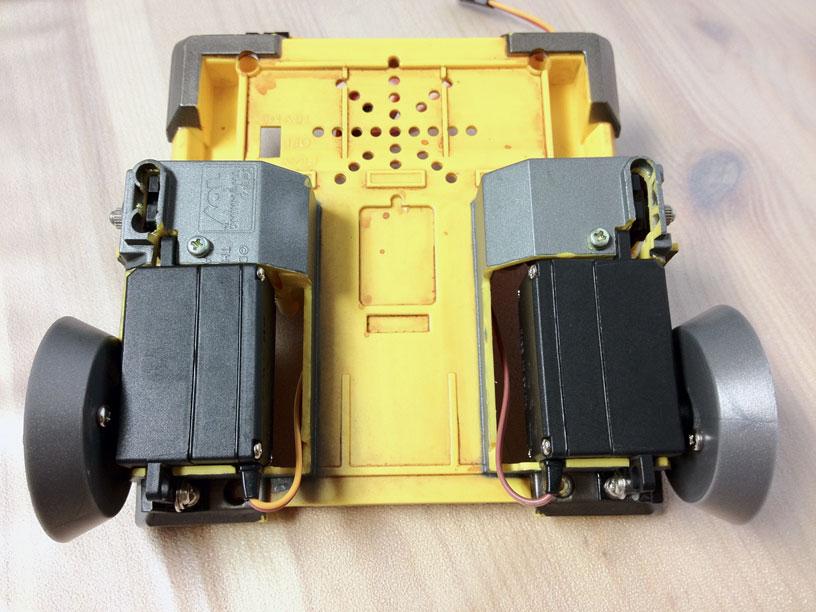
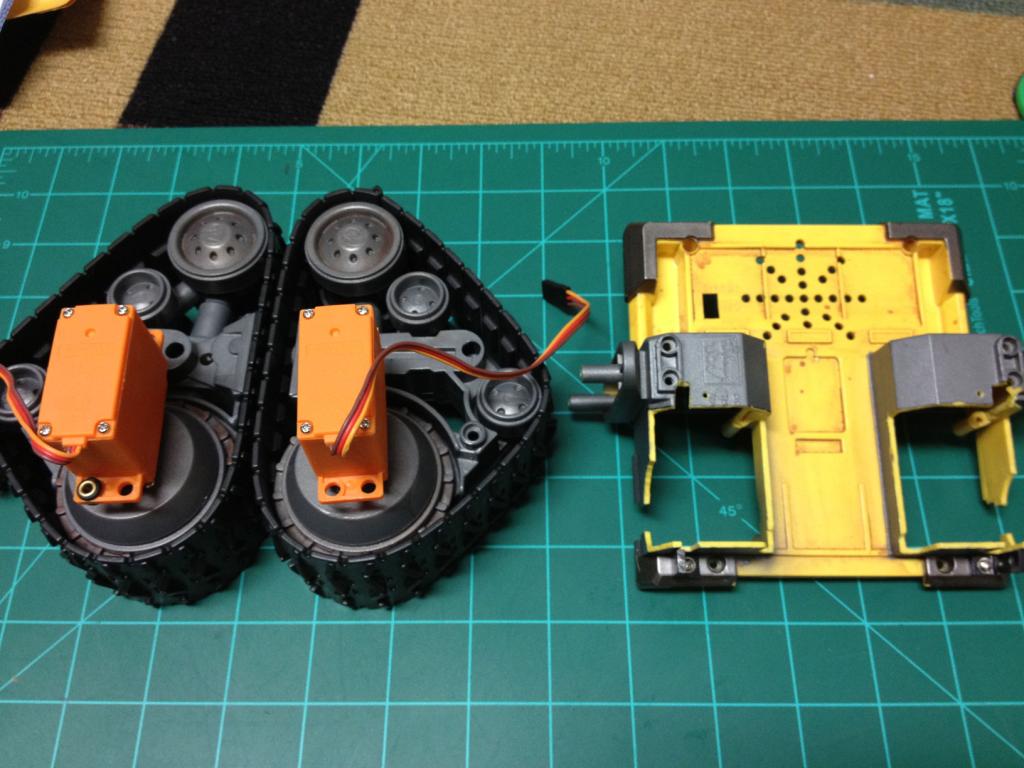
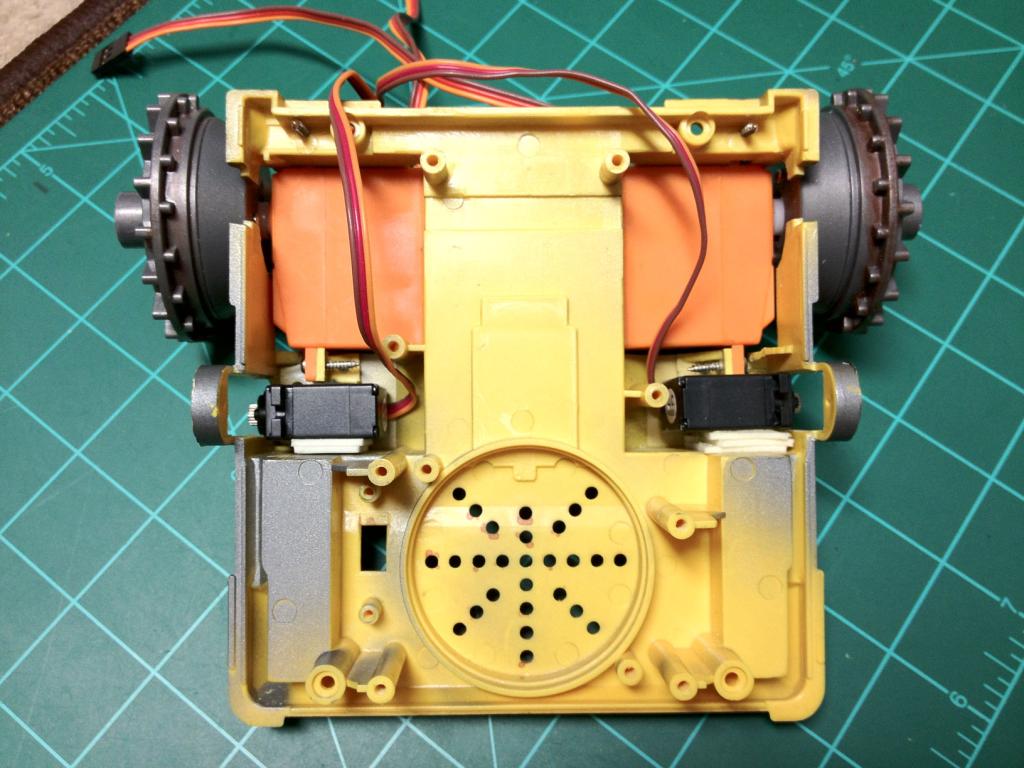
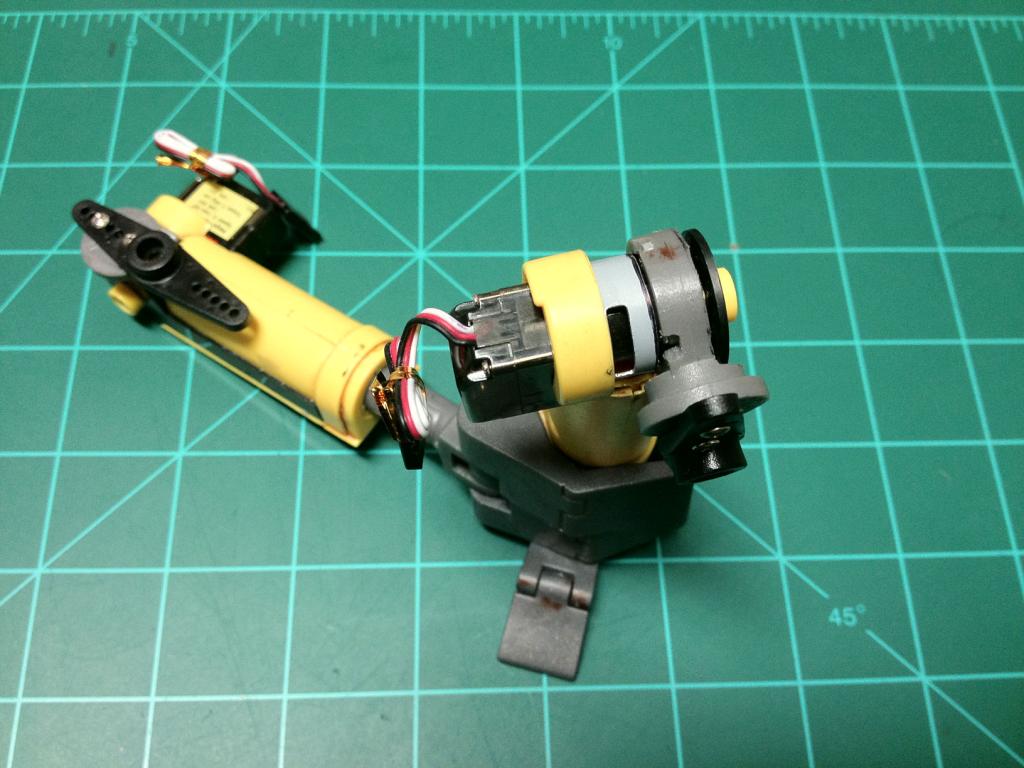
Metal gear high speed modified continuous servos for wheels.
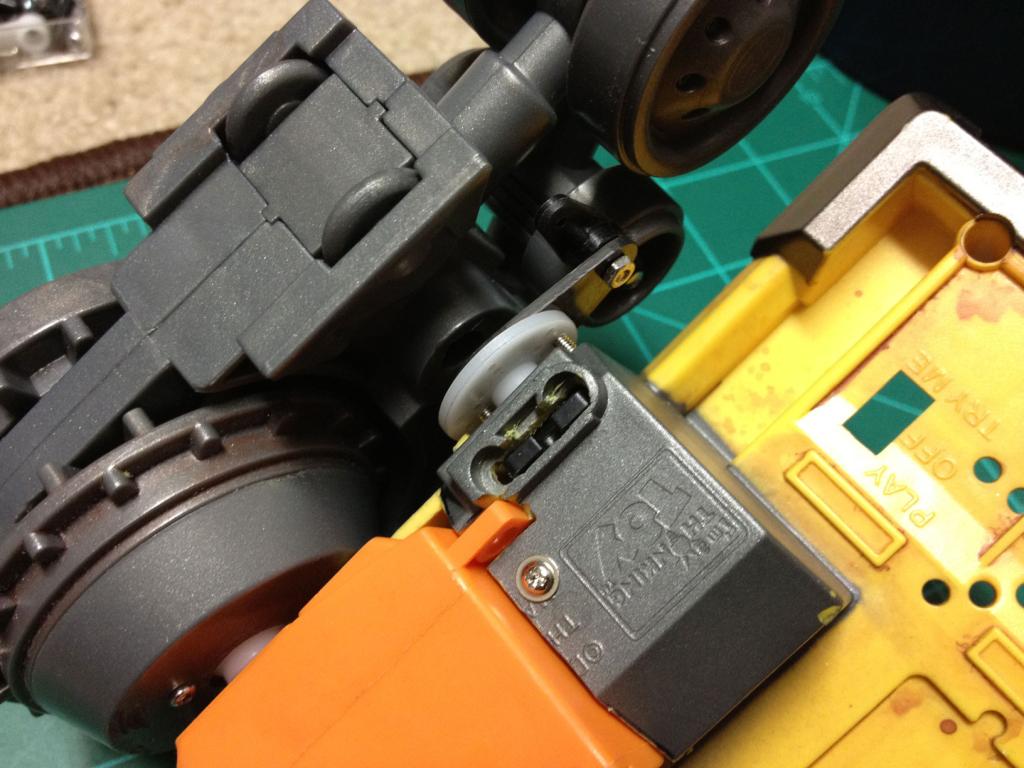
Micro metal gear servos for wheels tilt.
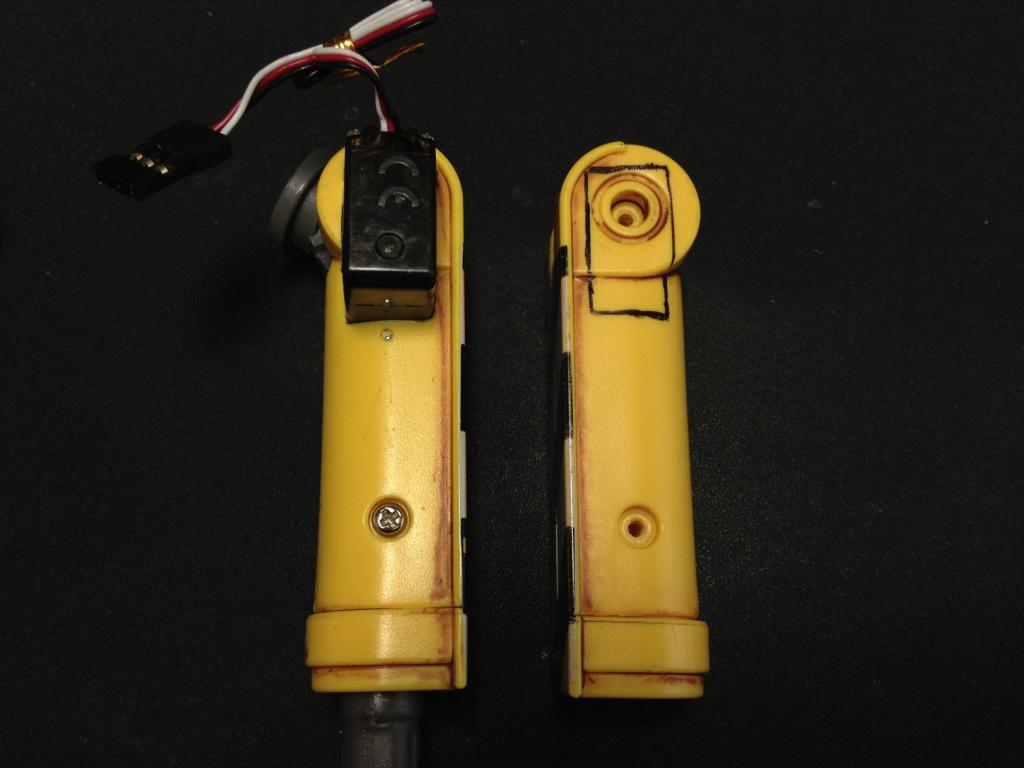
Mini metal gear servos for vertical arms movements.
Micro servos for horizontal arms movement.
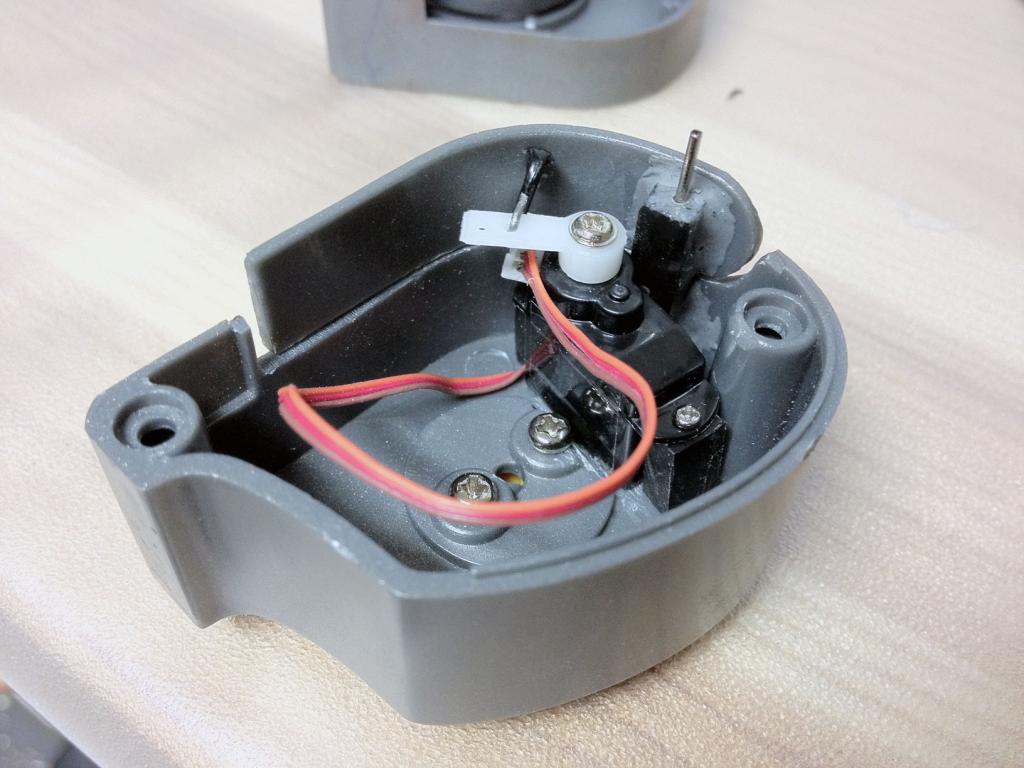
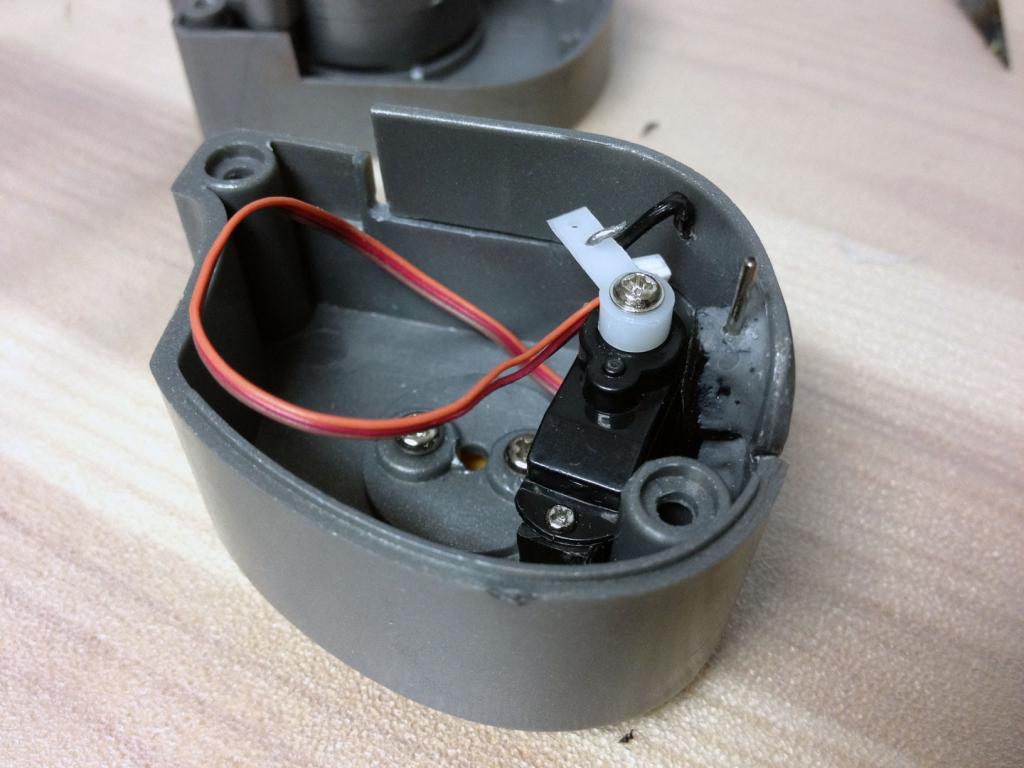
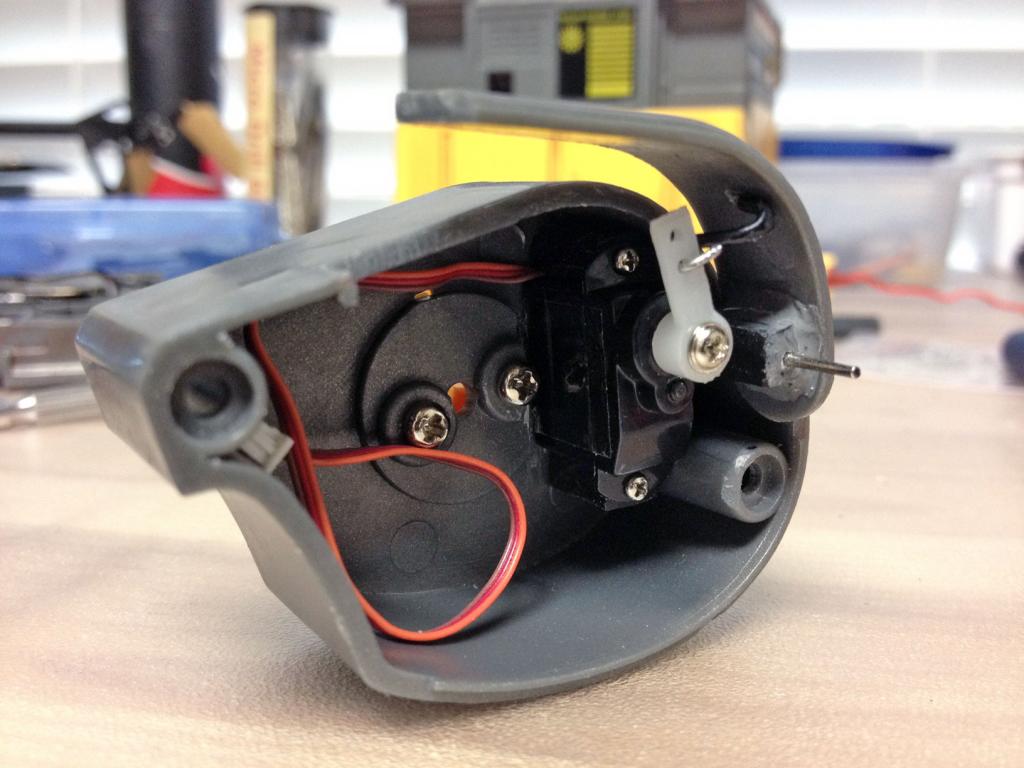
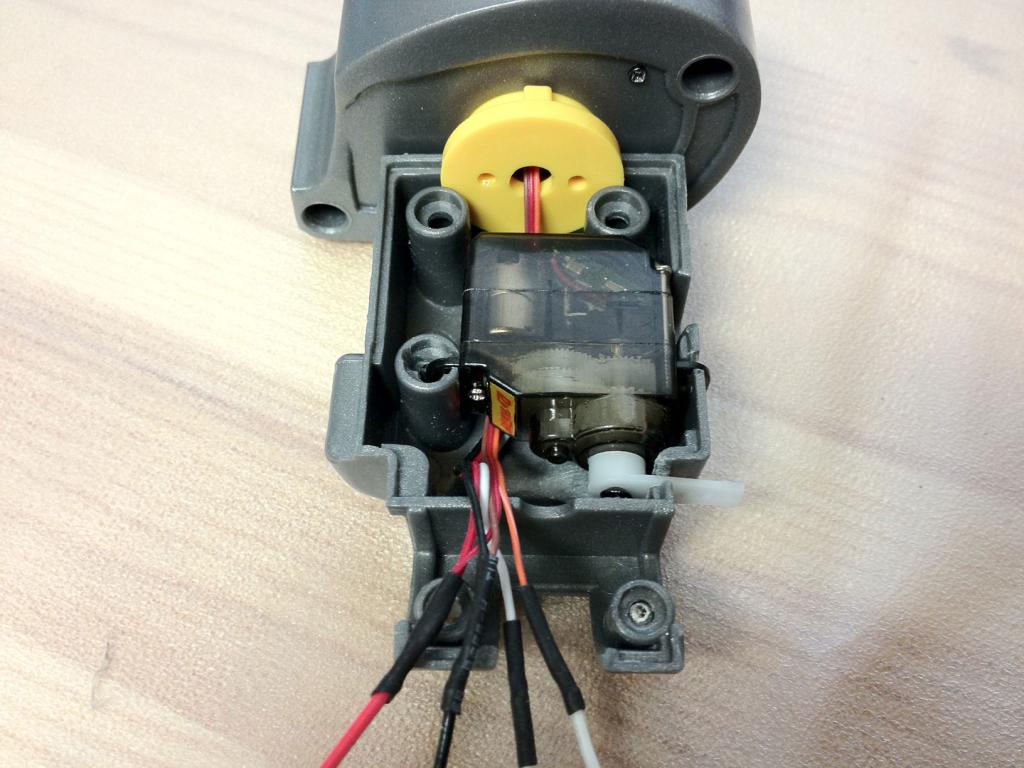
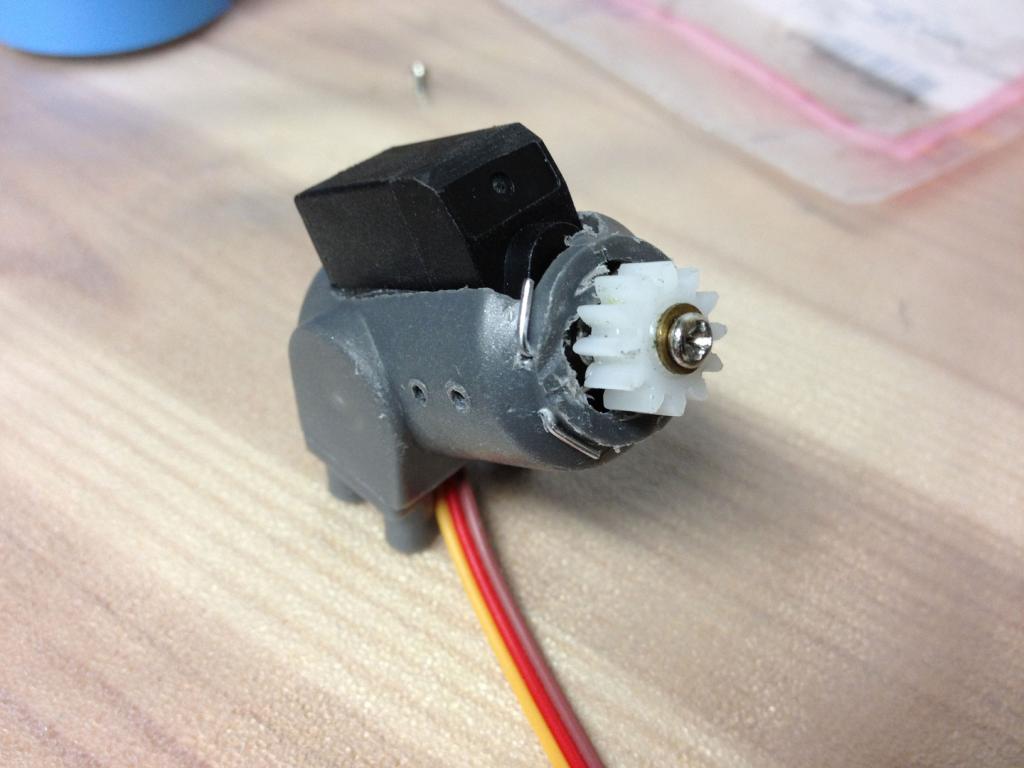
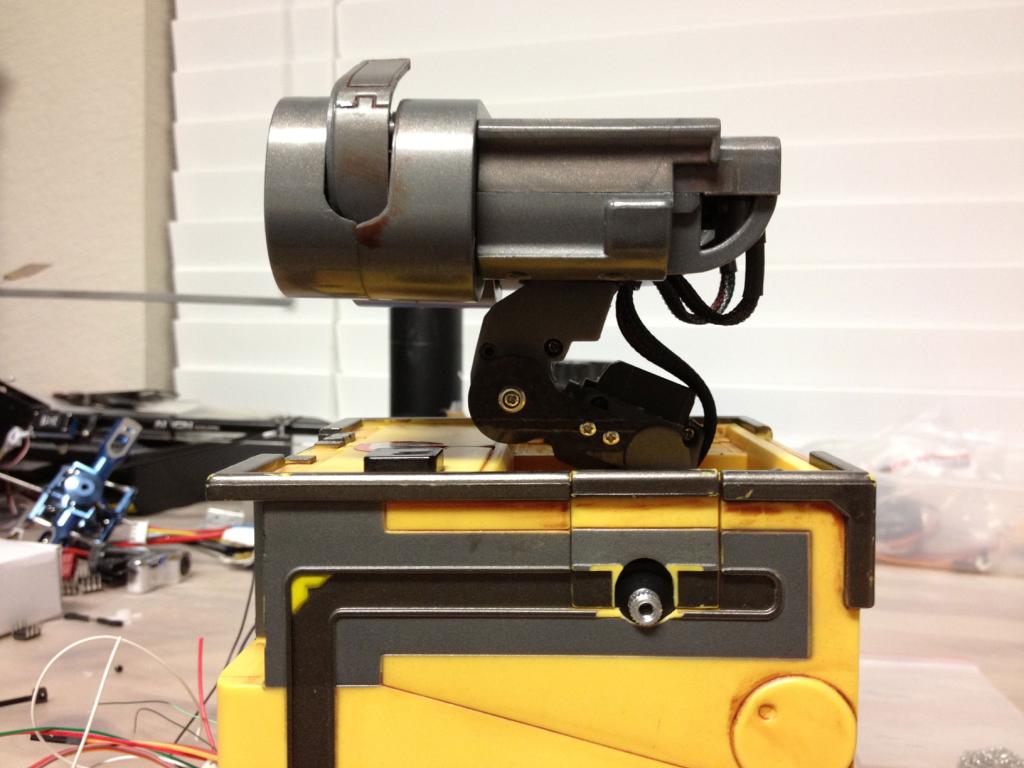
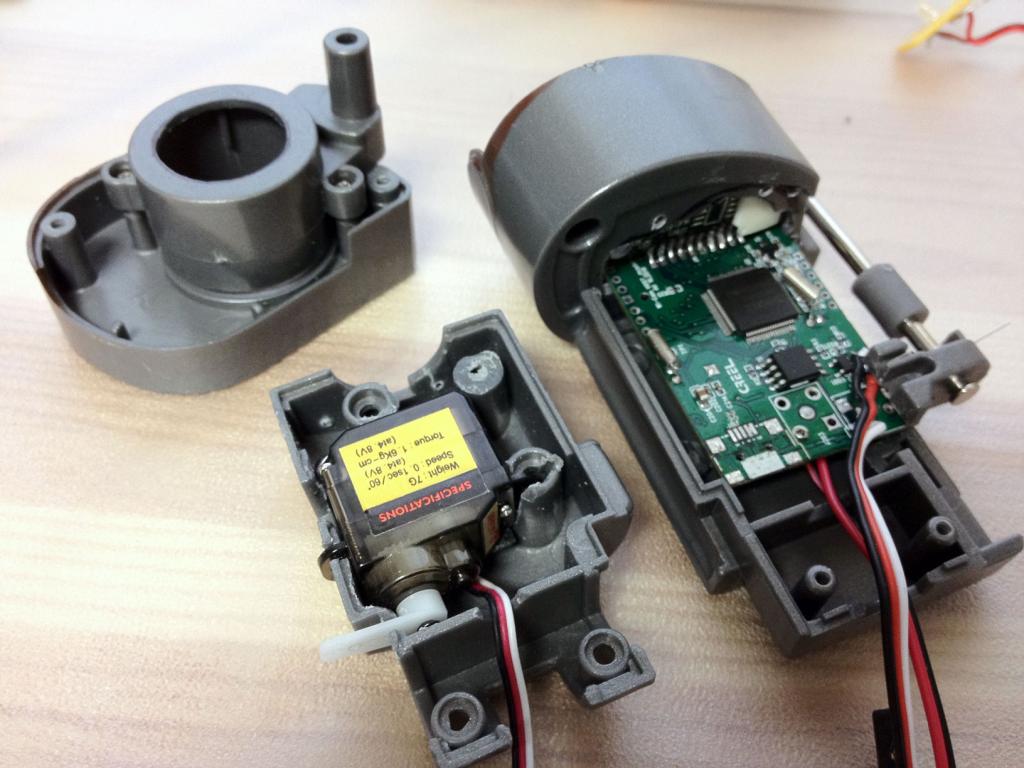
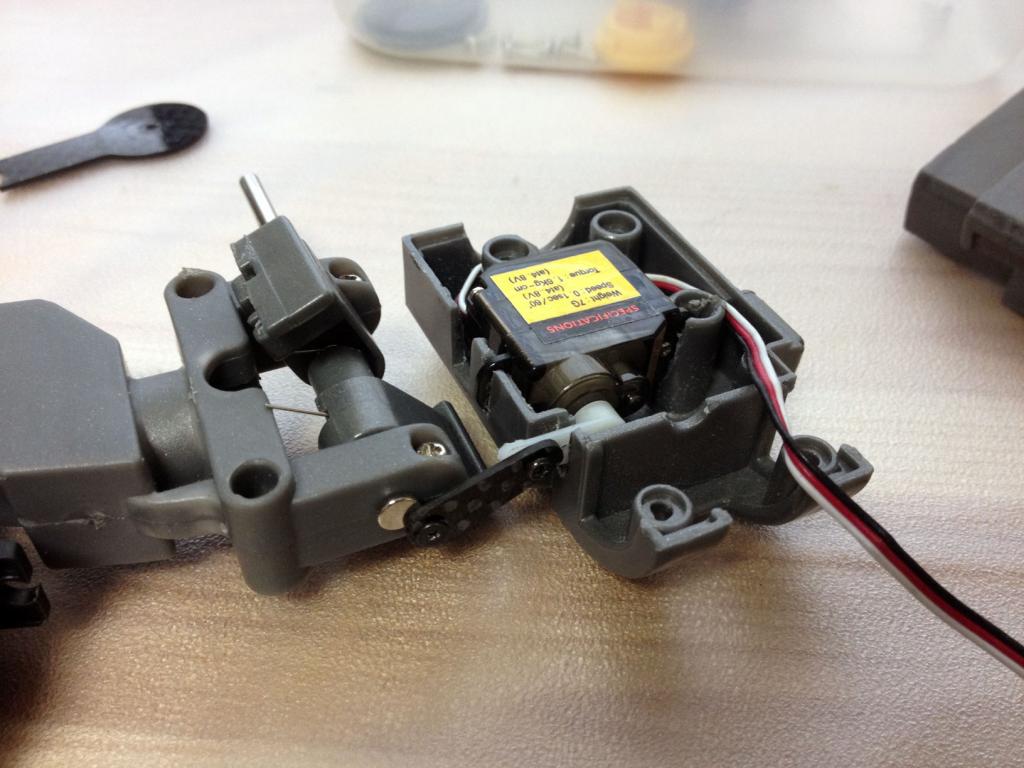
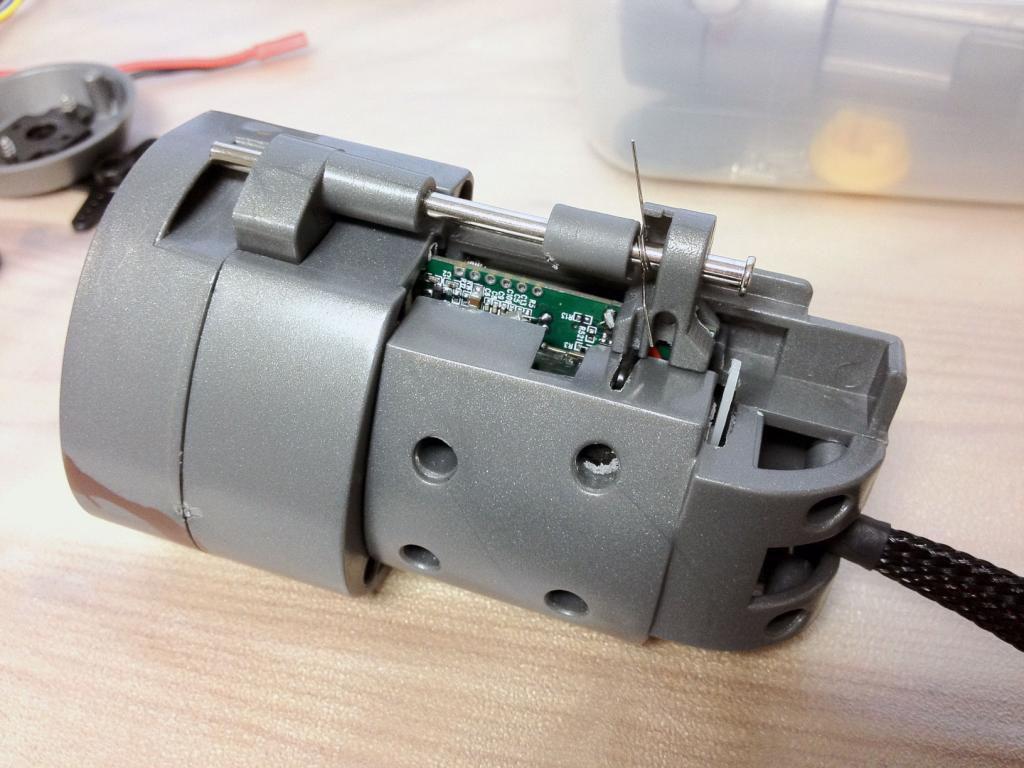
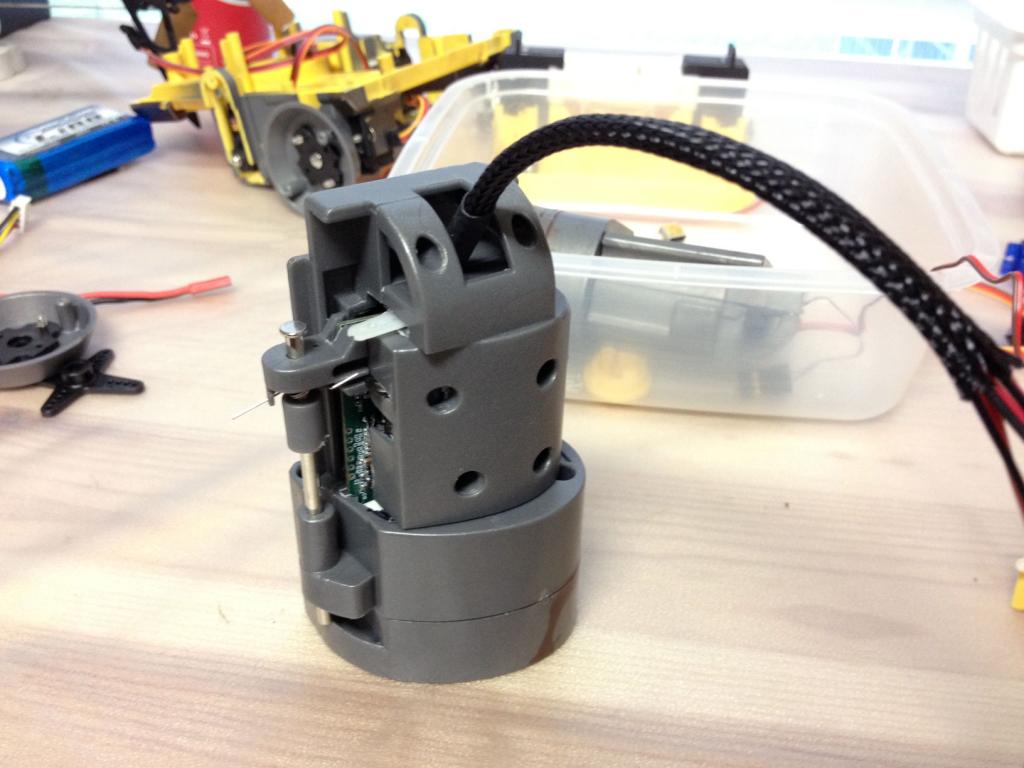
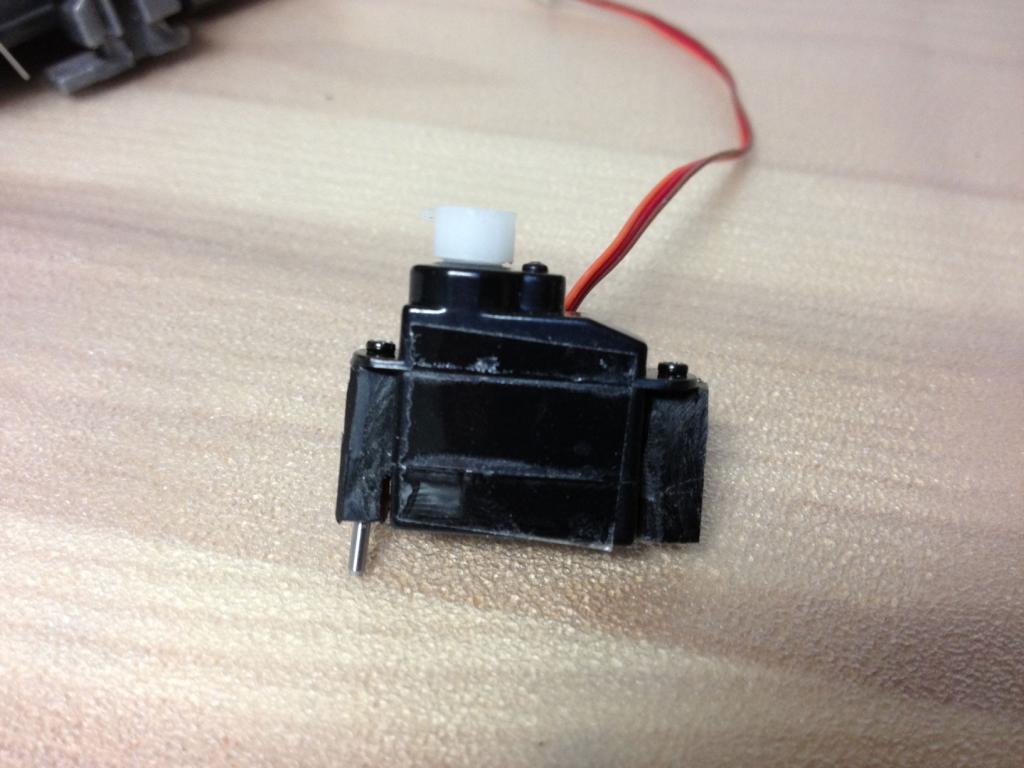
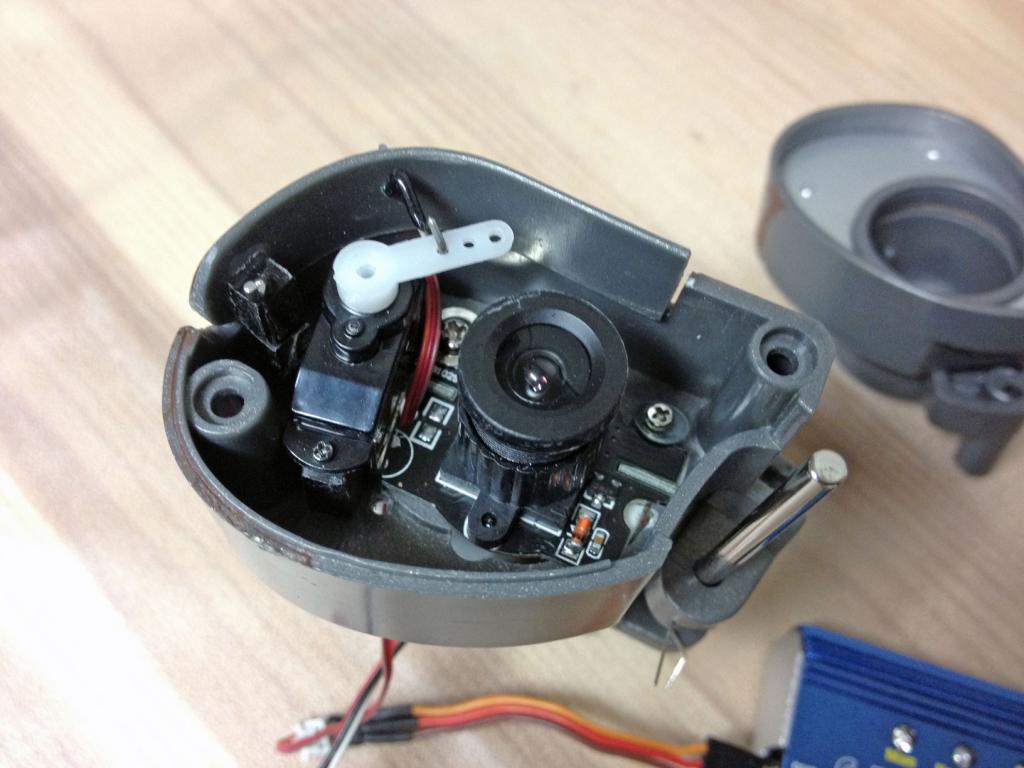
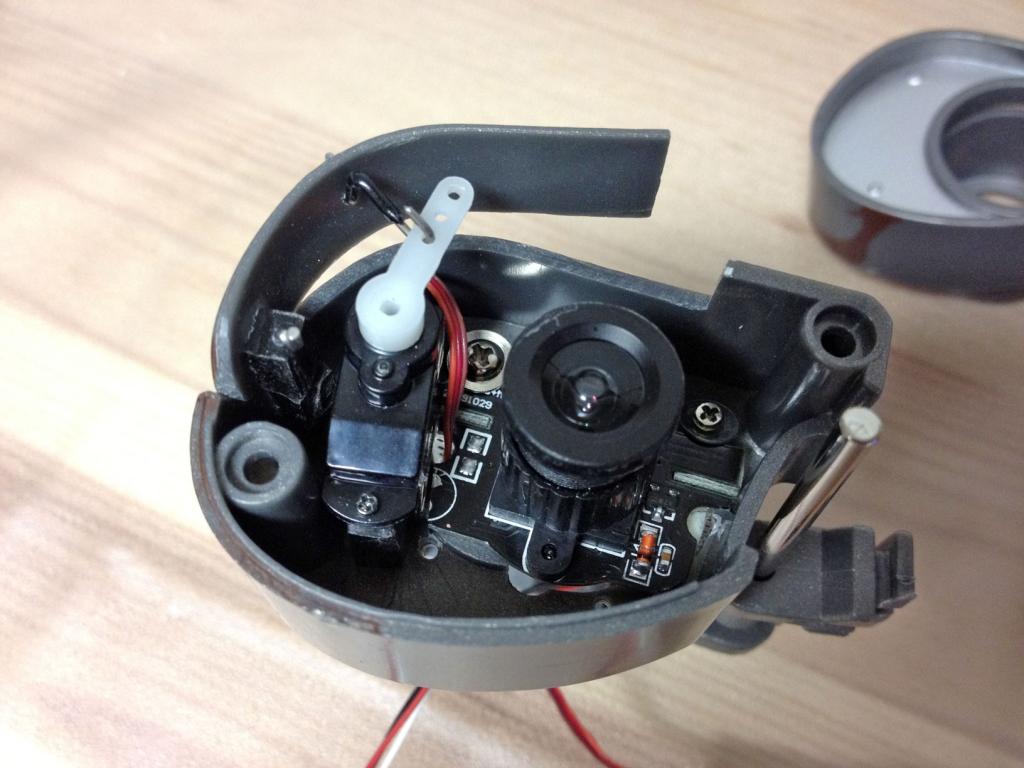
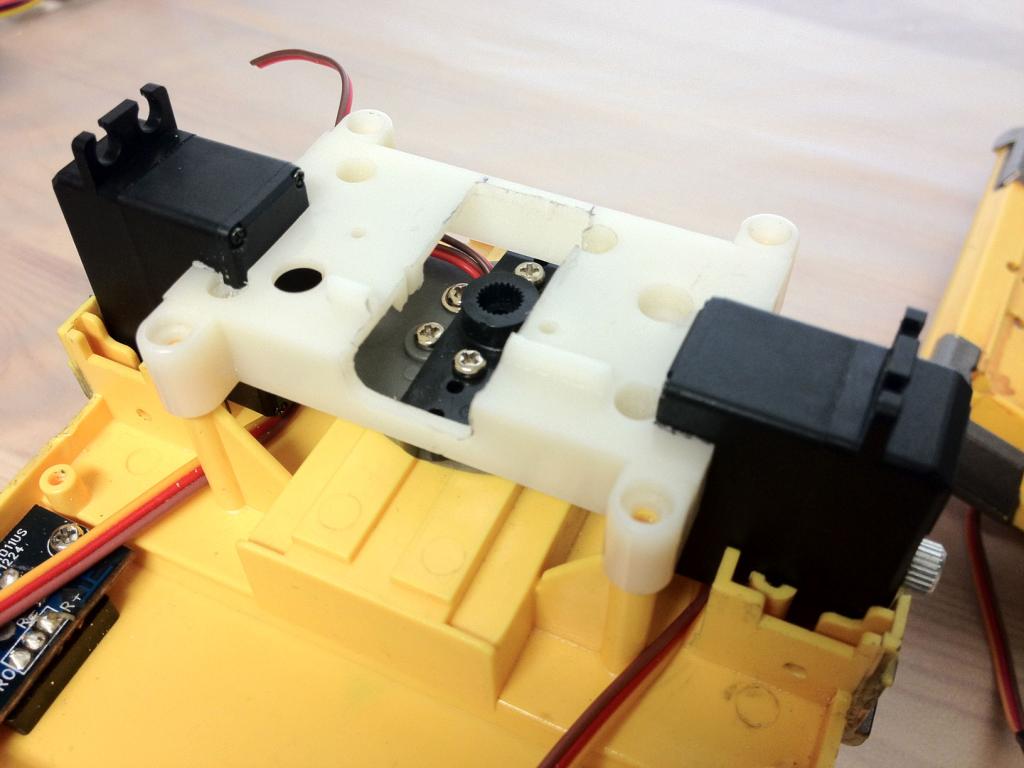
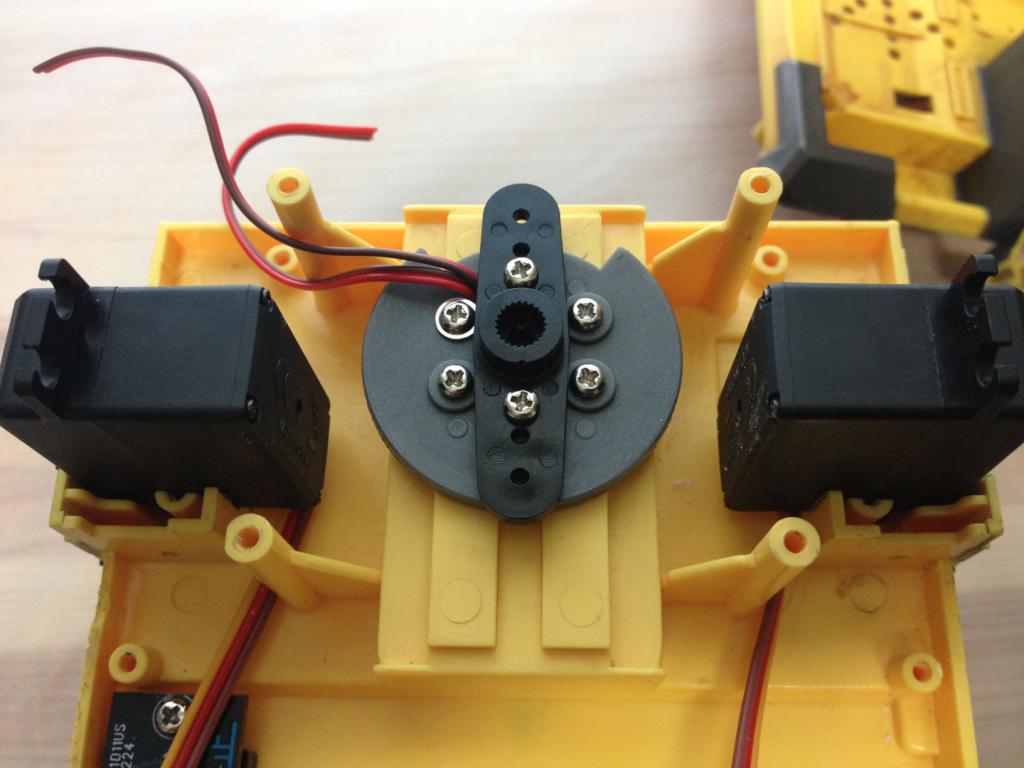
Micro metal gear servo for vertical neck tilt.
Mini metal gear servo for horizontal neck movements.
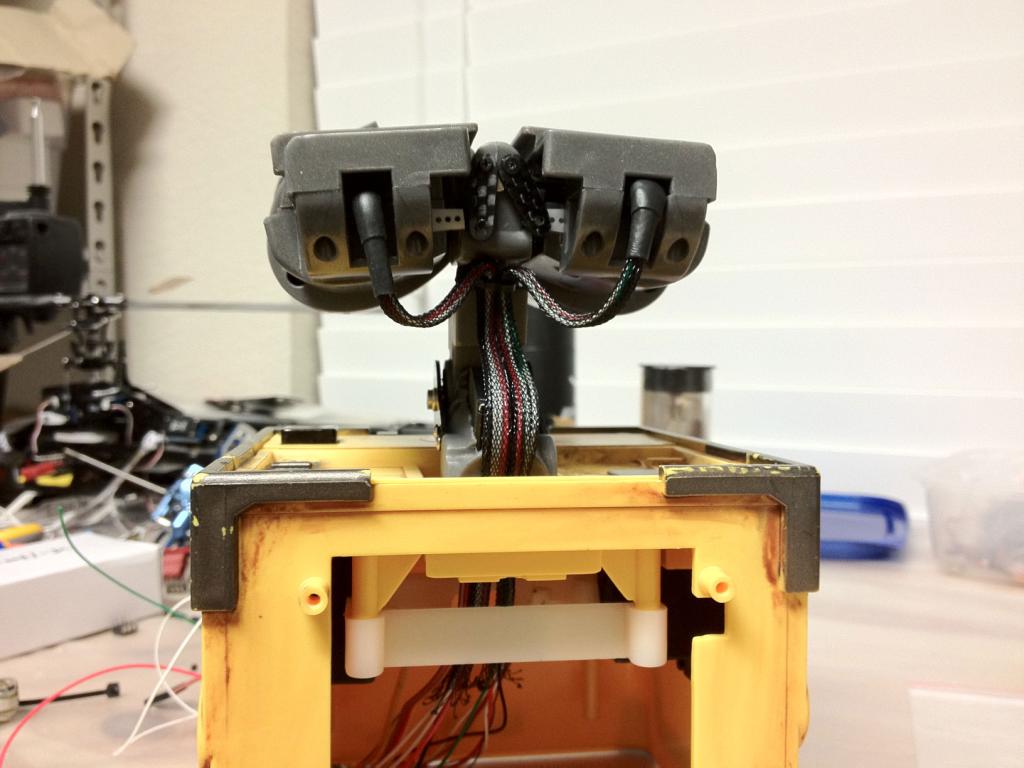
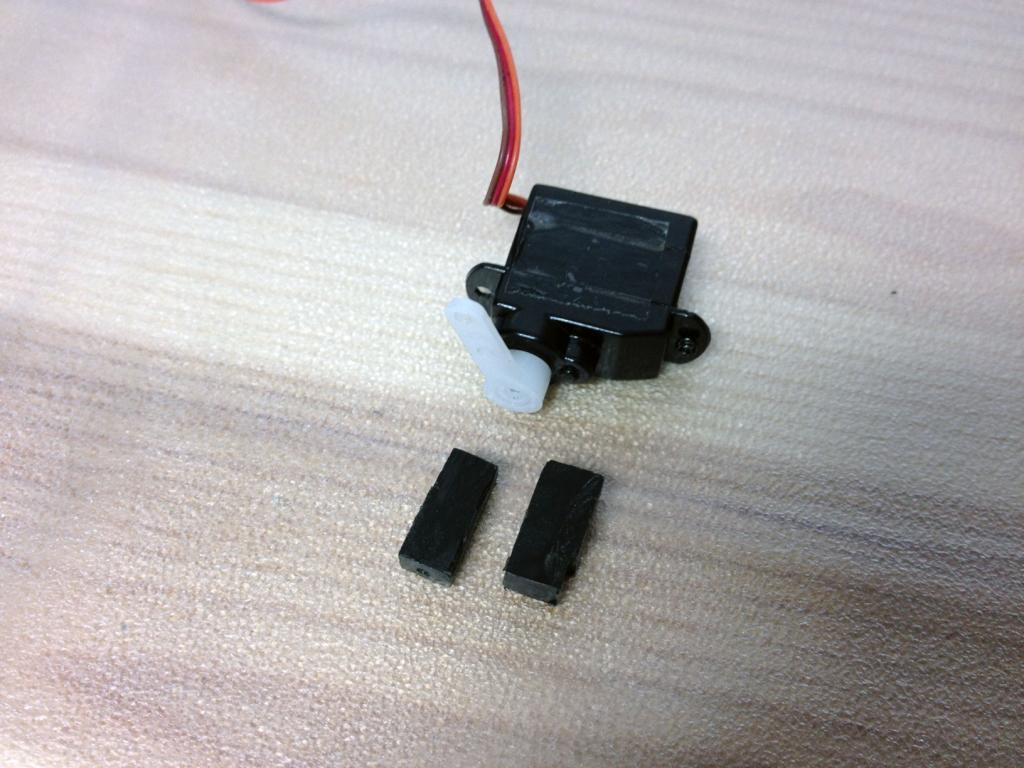
Micro servos for individual eye movement.
Sub-micro servos/mods for eye's lid animation.
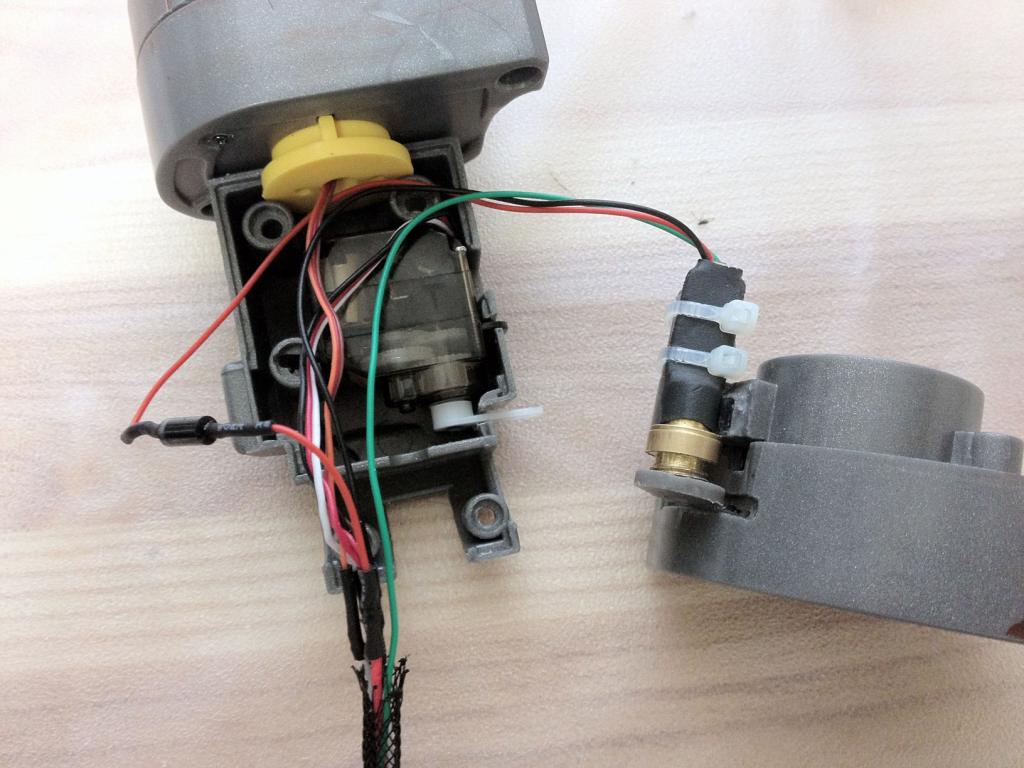
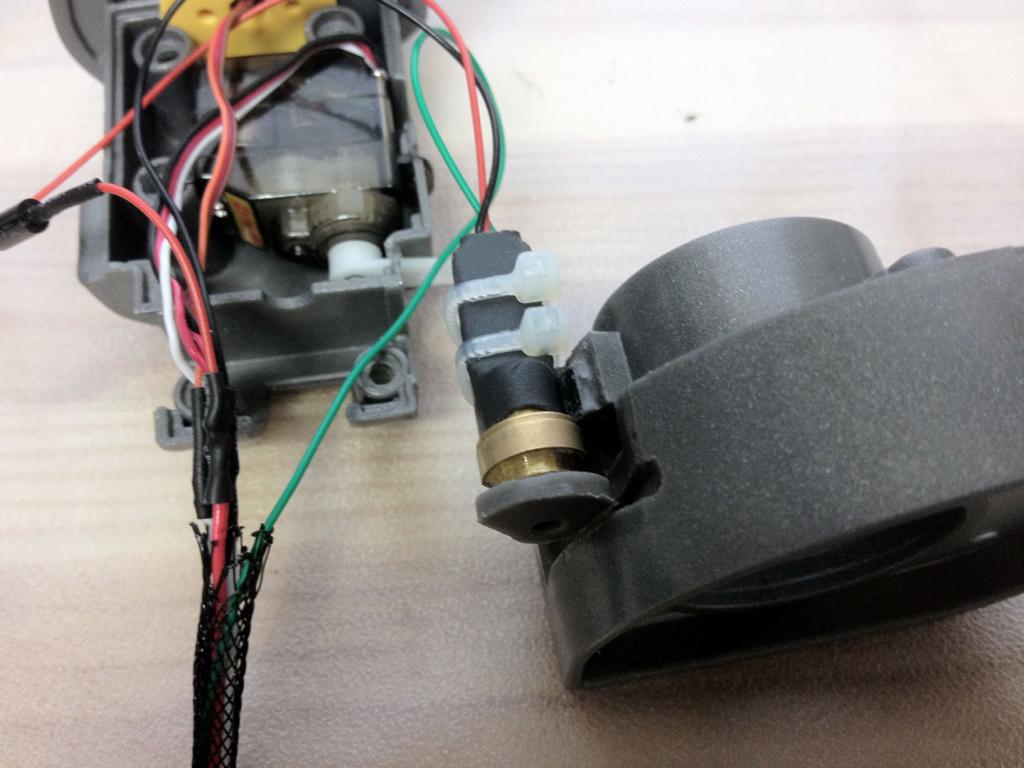
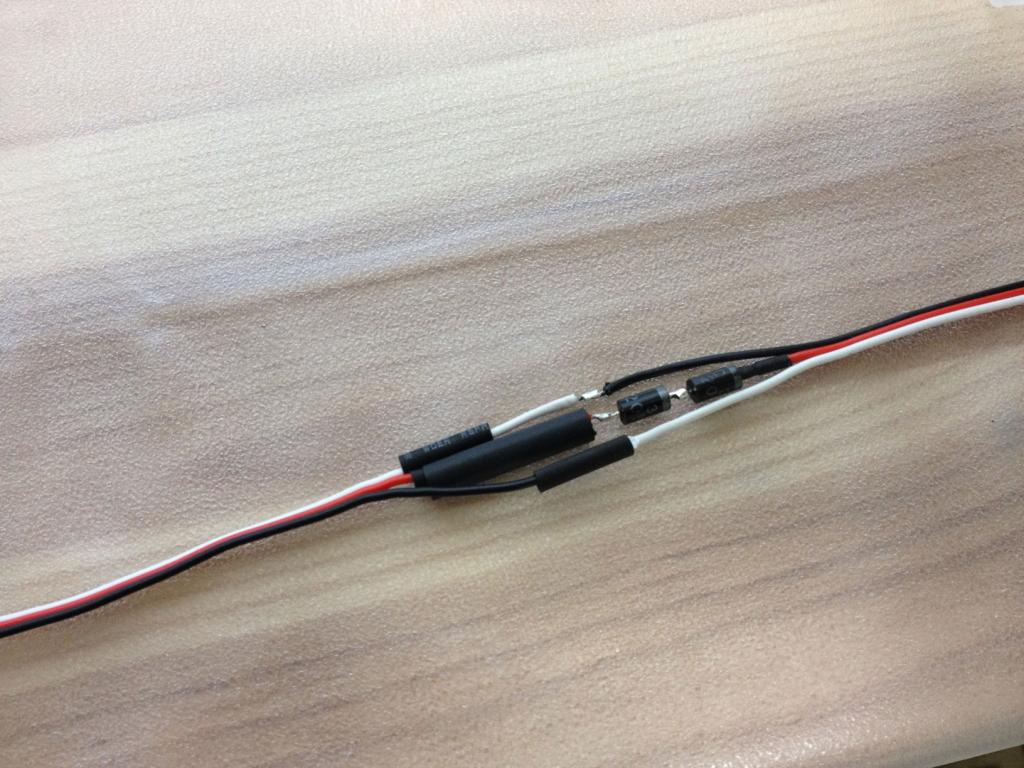
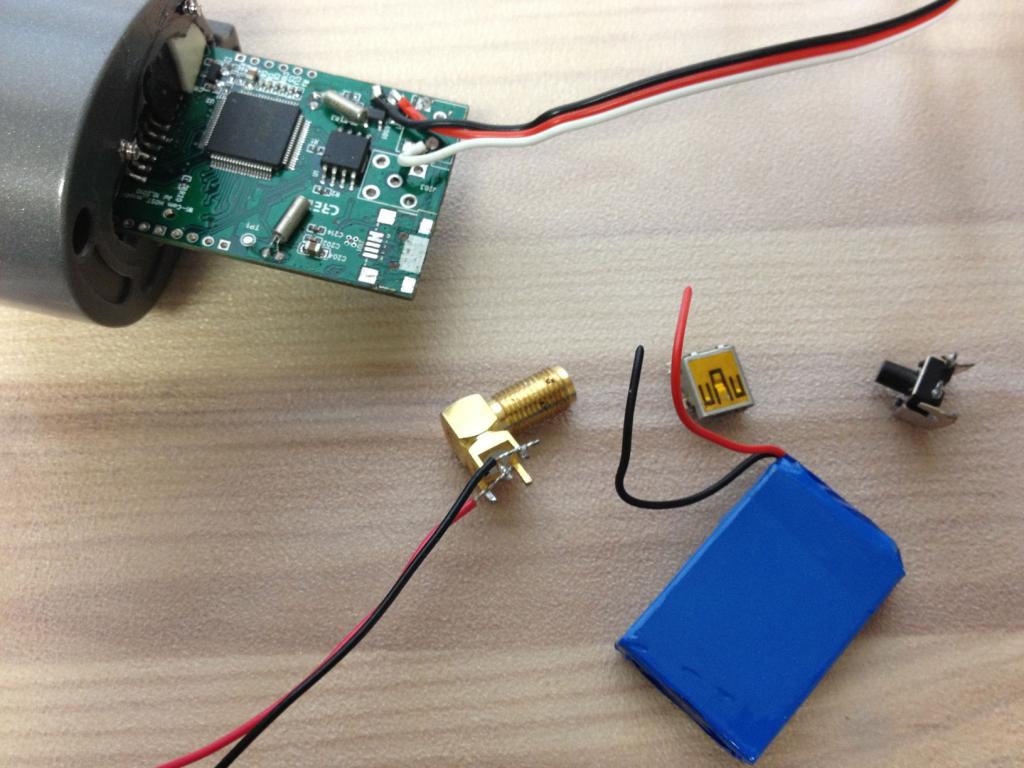
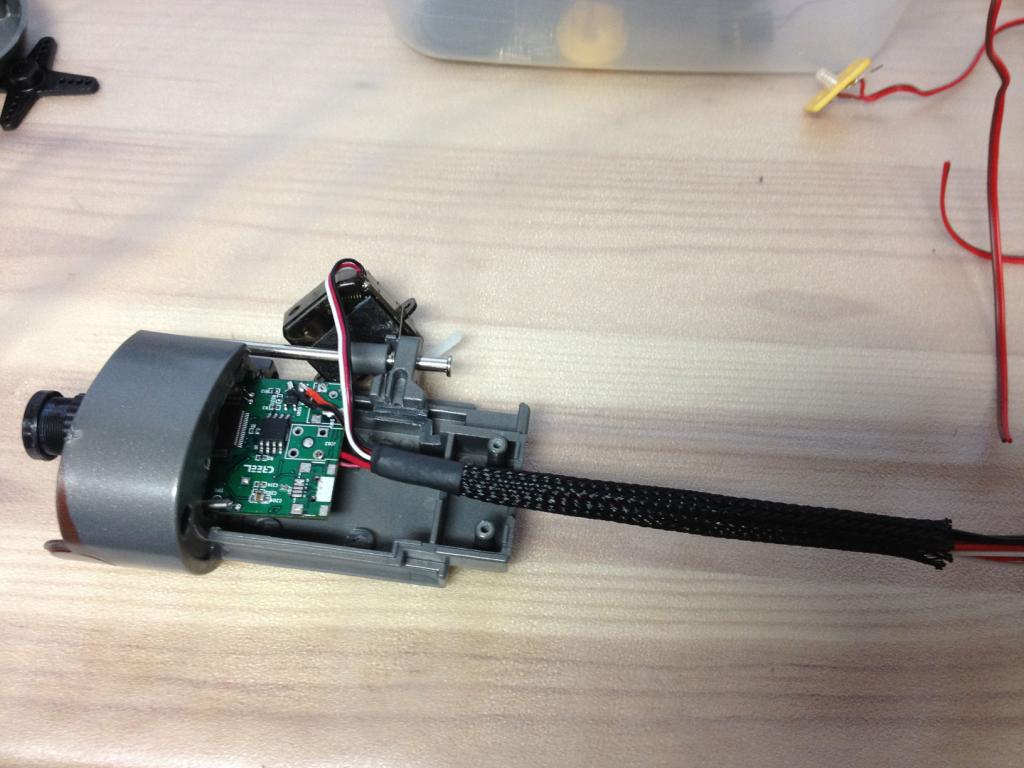
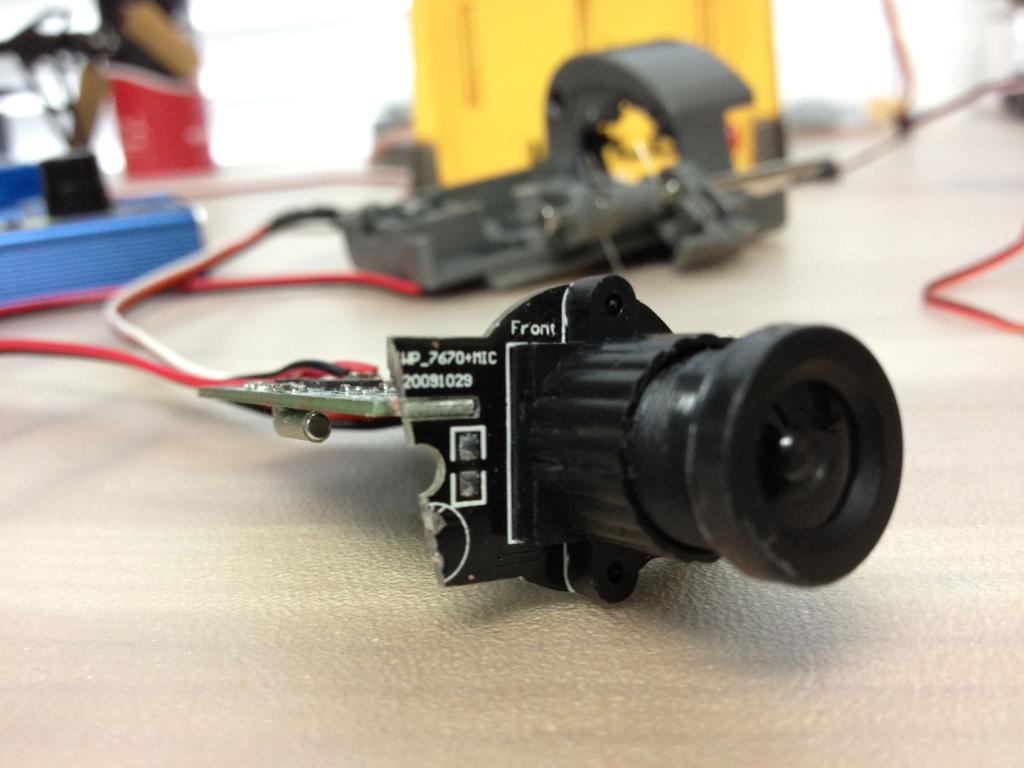
Get rid of dummy cables in the head, run all servos/camera wires from head down the same way and use heat shrink/black nylon mesh for realistic look.
Red laser between eyes.
Mock up left eye's lens.
Other things to be added/changed as i go
Yet to be done:
Light up solar panel (most likely, still thinking) Red LED in front in the black spot next to the solar panel (definitely) Make his wrist rotate (don't know yet, still thinking)












Discover more robots
Cem's Inmoov With 7 Touch Screen Display And Lattepanda...

Tmesserschmidt's The Vision (Marvel) Robot Replica


@DJ I understand that, but if you watched the video closely, the 2nd time it ran correctly, not moving down pass Servo(d9, 30), but the first time it went all the way down Servo(D9, 20), but i didn't set this anywhere. Why does it do that? I don't have anything else running.
Got it on the global servo speed part, but sure it will be much better if it's not global or have option to be global or not
Hey, Does the servo speed control only work on ldigital servos? or can analog servos play too?
Works for both, I have Analog servos in Wall-E eyes
@DJ I found what was causing all the servo glitches, i had all servos set on auto release after 5 seconds, as soon as I paused the auto release, everything works as expected, doesn't matter if i increase to longer time. I would really like to keep auto release on to save battery but how do i get around this issue? Tried controlcommand("Auto Release", pauseon) as well as ReleaseAll() but as soon as the servos are released from their positions, the first call of the scripts will make all the servos glitches, just like in the video where D9 should move to 30 but it went all the way to 20 instead, the 2nd try works correctly because it still hold position and I did it within 5 seconds of Auto Release.
Found out what was causing all the servo glitches, it wasn't auto release after all, it has to do with the servospeed and pause is critical in between, needs to give enough time for servos to reset back to normal speed at the end. I'm very pleased with the progress so far. I will have another video up soon with Wall-E head movements all working properly with motion/face/color tracking. I'm having trouble with the arms servos as the servos im using don't want to release from their position, they're noisy digital servos once locked in. Need to find different servos for arms up and down movement.
How did your track tilt work for you when its driving? I didnt use carbon fiber so there is a bit of play in mine that made it drift off to one side.
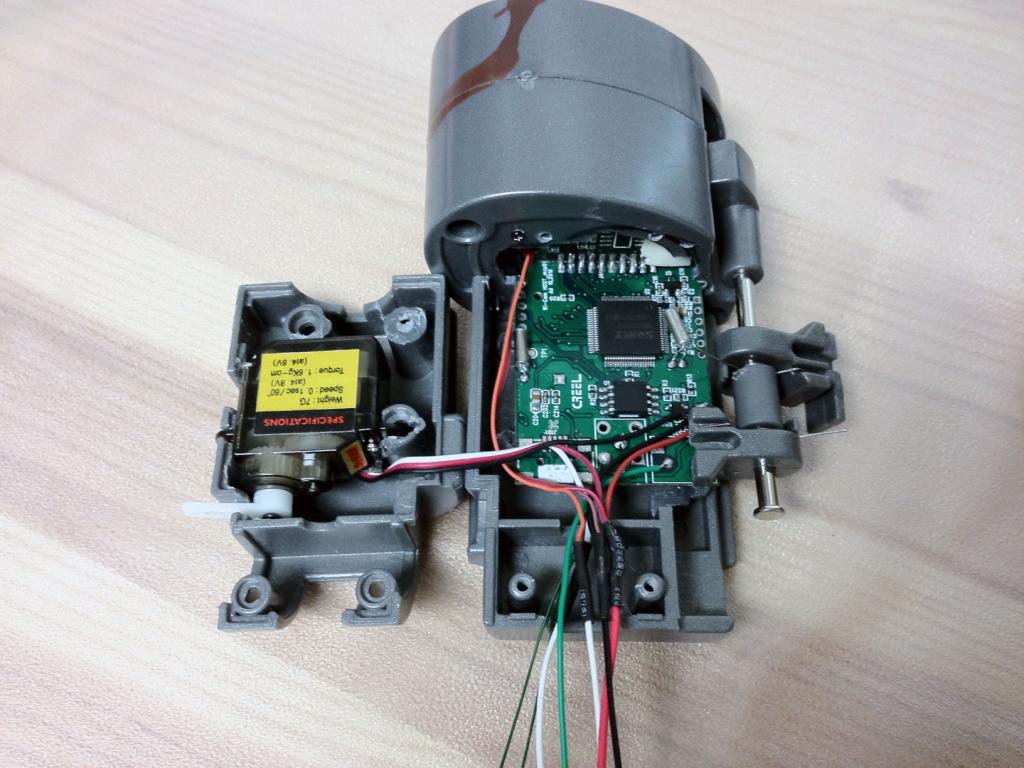
I haven't attach Wall-E's bottom yet...that sounds funny...hehe. I'm working on his head movement and arms one thing at a time, get all the expression and scripts figured out. I think the tilt servos are too soft, in a sense that Wall-E kinda sag on its own when the servo are released from holding position, i might have to go back to this later, the servos are rated 2.5kg.cm @ 5.0v, do you think it's too weak?
I'm having trouble with arms servos won't release so i need to change them out, but I like these servos and since I have everything in place looking so well so instead of changing them out I was thinking may be I can use PCB from another servo and hoping auto release will work and get rid of buzzing. I'm not sure if this will cause any negative effect or servo burn out. What do you think?
How loud is the buzzing? They must be struggling to hold the weight of the arm. I am using standard servos for my arms - of course i have the room because my Wall-e isn't as featured packed as yours!