













-635113052047031250.jpg)







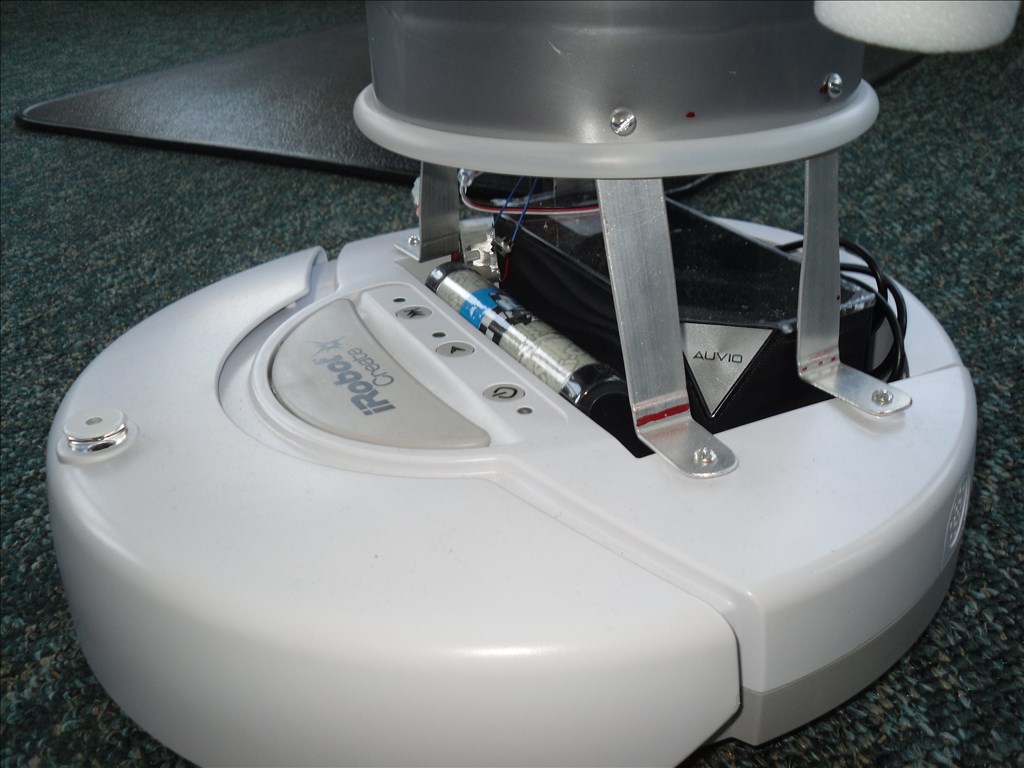






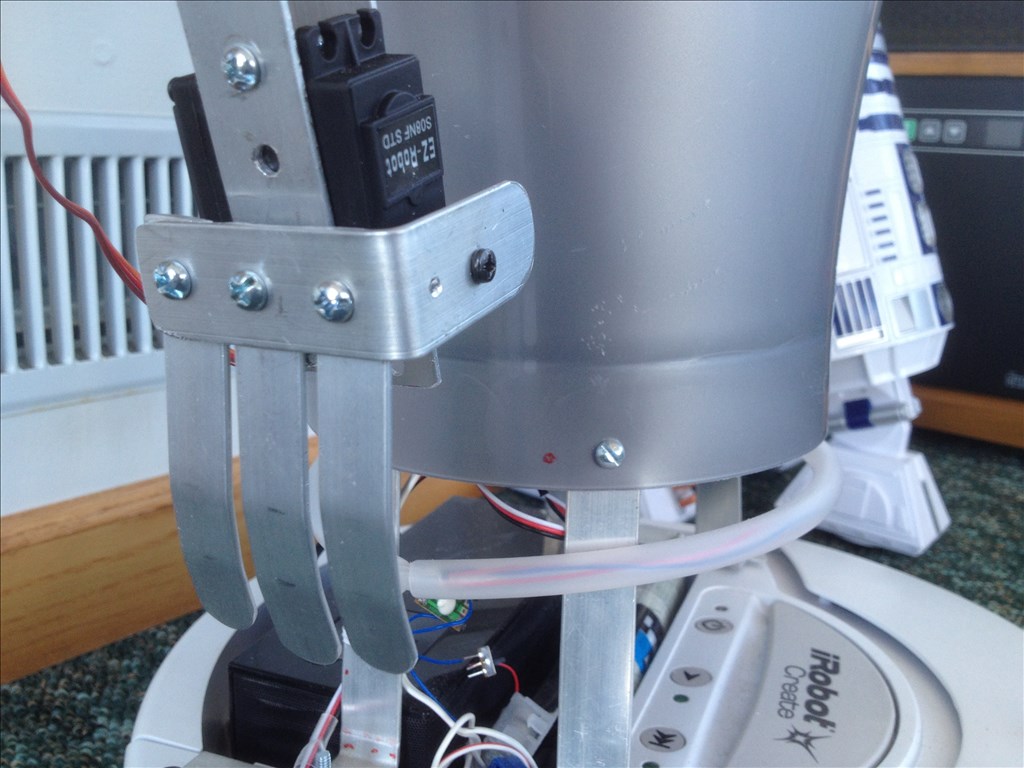
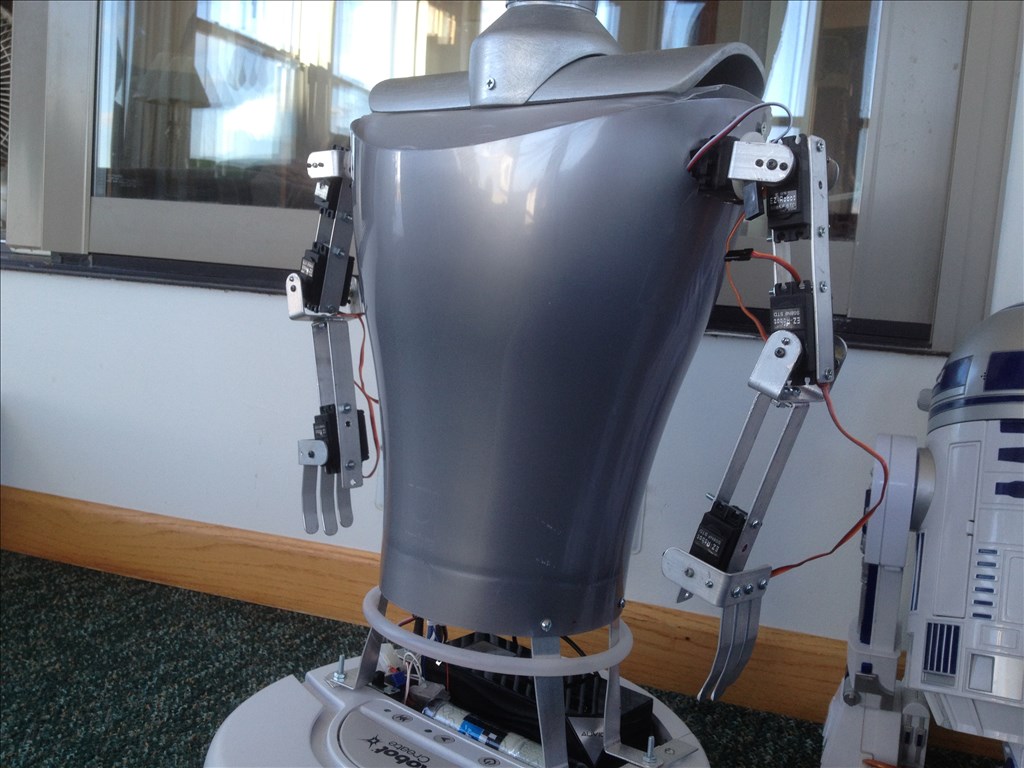


This is my first showcase of my robot. Her name is Captain Ann Droid. My last robot was built 25 yrs. ago. When I told my wife and daughter I was going to build a faster and smarter robot they told me it should be a female? She uses an Irobot Create platform, EZ robot kit and software, Radio Shack blue tooth speech unit and other parts. EZ robot has been far above my expectations. Thanks D.J. I hope my links work. Steve S
Thank you to the EZ robot community


By Steve S
— Last update
Discover more robots

Pabi!O's Pabi!O's Wall-E
Custom WALL-E robots: compact interactive and larger U-command builds using old sound board, servo-packed upper half,...

DJ's Vision Tracking Robot
EZ-B Vision color-tracking test robot by DJ Sures tracks and follows colored objects with a camera head; modified toy...

Jeremie's Richard R And Bhouston In Make Magazine
Celebrate Richard R and Bhouston's inMoov robots being published, showcasing recognition and inspiring more creators to...

jstarne1, Does the little Acer netbook operate EZB without the internet? Sometimes I take my robot places where there is not any internet. I like the idea of having a separate, inexpensive pc., instead of changing everything on my wife,s pc. It would operate all the EZ Robot functions, including processed video? Thank You Steve S
Why do you need internet for your ARC operation? You will only need it if you want to access the Cloud files or download upgrades. at the end , it is BT connection to EZB and Direct Camera 2.4 GHZ to the USB dongle. The question that may arise is how much powerful is the Netbook , to handle the ARC functions and especially Video processing. I remember that there was a detailed subject in the forum discussing the min configuration needed. Josh , others and who ever tested it may give more proper suggestions for Netbook Models and prices.
ARC Community, My EZ Robot, Captain Ann Droid has been a great hit @ the campground. The first night demonstration @ the campground for a couple friends was rewarding. The 2nd night @ 7 PM was awesome demonstrating my robot for 30 people! (People told other people) I had to reboot my laptop (vista), but minutes later, patient children and adults loved the performance of the "EZ Robot" Captain Ann Droid performing for them. I programmed lots of children names. They all loved it. I told them about EZ Robot and to Google EZ Robot. People came over when we packing up the 3rd day, and wanted to see the "Robot". They are challenging me for a dance routine and more! Thank You Steve S
Awesome Steve! More inspiration for further personality routines for Ann Droid!
This a short video showing Captain Ann Droid using the Roomba("init") command with a SendSerial Beep in startup script. It also shows some SendSerial movement scripts being used with voice commands. Like I showed Josh. The last part is a Halloween tribute to Edgar Allan Poe " The Raven" with some autoposition, SendSerial scripts, and a soundboard "snooring.wav".
Thank You EZ Robot! Steve S
#I have improved and evolved my SendSerial IRobot SendSerial command for turning left Say("I will turn left") #original EZ robot command #sleep(1000) #left(255,740)
#1st IRobot SendSerial command #SendSerial(D0,57600,137,0,100,0,1) #sleep(3000) #SendSerial(D0,57600,137,0,0,0,0)
#IRobot command using angle SendSerial(D0,57600,137,0,100,0,1,157,0,90) SendSerial(D0,57600,137,0,0,0,0) #Above works great!
#Any ideas for turning right? I have tried my SendSerial command for turning right incorporating the right turn parameters with the above 90 degree turn, but my robot ran away stating I have given it an unrecognized code error? I have also had limited success with SendSerial distance. I have been unable to find a "complete" code of IRobot drive codes online-maybe someone else can help? Thanks Steve S
Irobot Create Users Here are SendSerialCommands That you can use on your Create to "Calculate angles and distance in realtime". Maybe some of you already utilize them, but I thought I would share them. I could find bits and pcs. of examples in my Create manual and online, but not complete information (especially on reverse distance calculation and turning right to a specific angle). I will also demonstrate a sequential toggle of Create,s 3 LED indicators. These commands are for the Create only, which uses a superset of commands, and some are different from the Irobot Roomba. Three of these commands are the "Wait for distance command 156", the "Wait for angle command 157", and the "Create LED play command 139". The wait commands do not allow any other input commands until they are complete.
say("I will move forward medium speed calculating 12 inches/305mm")
Forward Command with distance of 12 inches
SendSerial(D0,57600,137,0,180,128,0,156,1,42,137,0,0,0,0) sleep(2000) ControlCommand("IRobot Commands", ScriptStart, "toggle 3 LEDS")
D0 is the EZB port, 57600 is the baud rate, 137 is the drive command, 0 is forward, 180 is medium speed, 128,0 is straight, 156,1 is forward wait for distance 42(about 12"-change 42 to 144 equals 15.75" 42 to 254 equals about 20", 137,0,0,0,0 is stop
say("I will move reverse calculating 12 inches") #REVERSE SendSerial(D0,57600,137,255,75,128,0,156,254,213,137,0,0,0,0) sleep(2000) ControlCommand("IRobot Commands", ScriptStart, "toggle 3 LEDS")
137 is the drive command, 255 is reverse, 75 is reverse speed equal to 180 in forward (255-180=75), 128,0 is straight, 156,254 is wait for distance command reverse, 213 is reverse distance value (255-42=213), 137,0,0,0,0 is stop
say("I will turn left calculating 90 degrees") SendSerial(D0,57600,137,0,100,0,1,157,0,90,137,0,0,0,0)
157 is the wait for angle command, 0,90 is for left ( pretty straight forward)
say("I will turn right calculationg 90 degrees") SendSerial(D0,57600,137,0,100,255,255,157,255,165,137,0,0,0,0) 157 is the wait for angle command, 255, 165 is for right (255-90=165) The angle commands are accurate on hard floors
#toggle LEDS power,play,advance SendSerial(D0,57600,139,0,0,128) sleep(300) SendSerial(D0,57600,139,0,0,0) sleep(300) SendSerial(D0,57600,139,2,0,0) sleep(300) SendSerial(D0,57600,139,0,0,0) sleep(300) SendSerial(D0,57600,139,8,0,0) sleep(300) SendSerial(D0,57600,139,0,0,0)
139 is Create play LED indicator command, use above values, 139,0,0,0 turns off
These commands do not work on my Irobot Roombas, but the Custom Movement Panel below will work on Roomba. They also track straighter using script. EZ Robot is so cool, even after I replaced the Movement Panel with this custom panel, some of my old scripts using the forward, rev, left, and right still operate!
Maybe after we receive the EZB4 with 2 way communication (receive info packets) some one can help me utiiize the receive serial info.
Watch the 3 LED lights in the start of this video
https://www.youtube.com/watch?v=2lhSJ8dPPPM
https://www.irobot.com/filelibrary/pdfs/hrd/create/Create%20Open%20Interface_v2.pdf
You need a different init command for basic roombas manufactured after 2005.... create uses 128 or 131 or something like that... roombas that vaccum have something like 132 or 136 or something. I can't remember... Hopefully Romba Doc will chime in to help out...