

















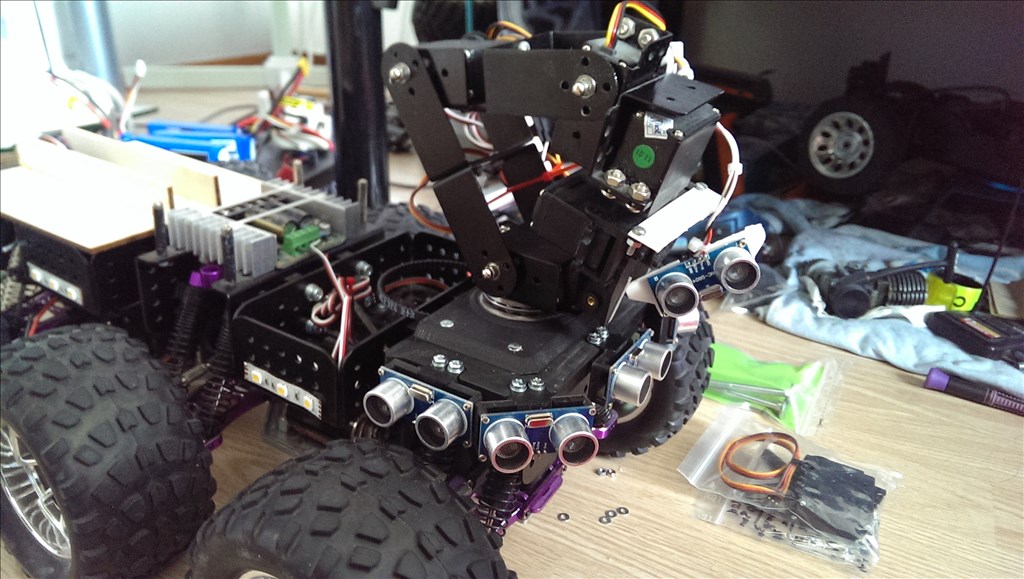














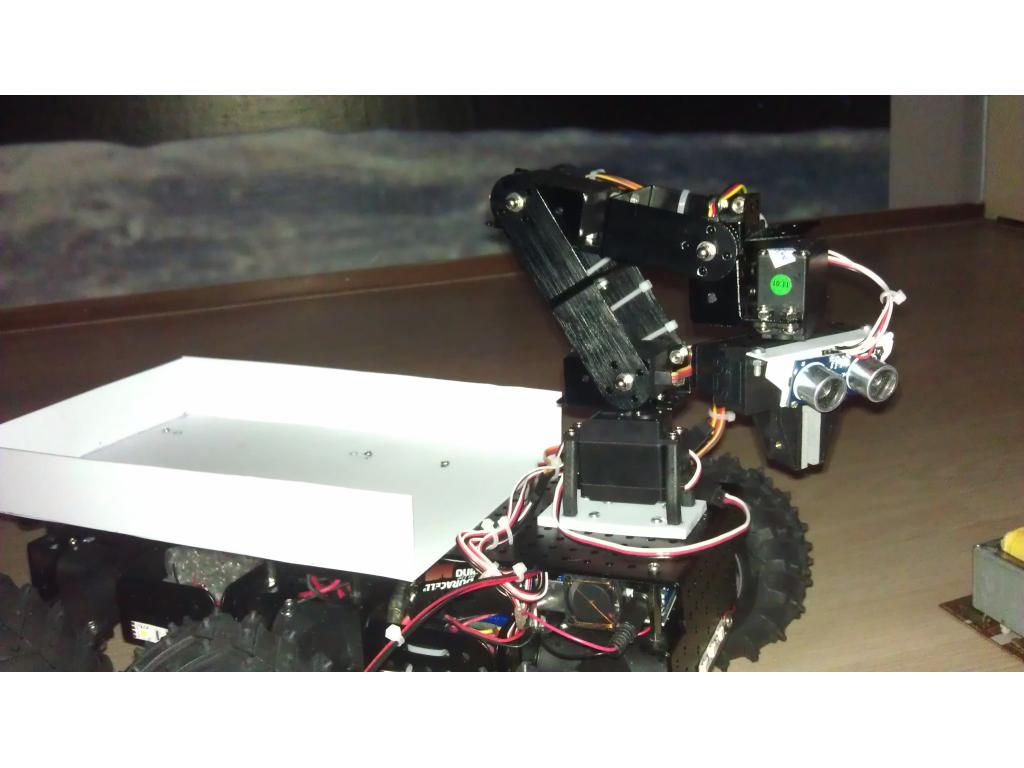


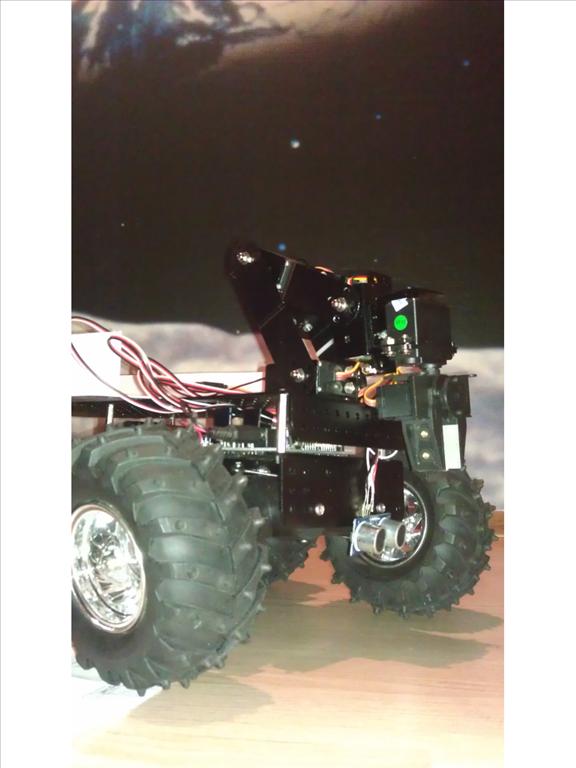
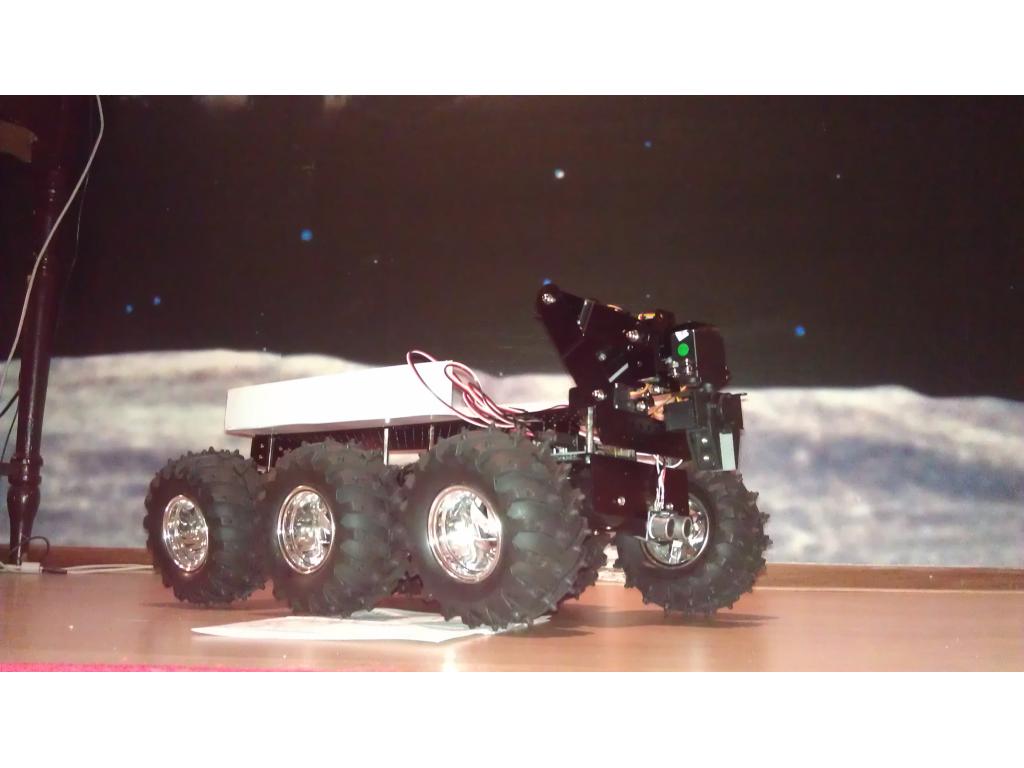


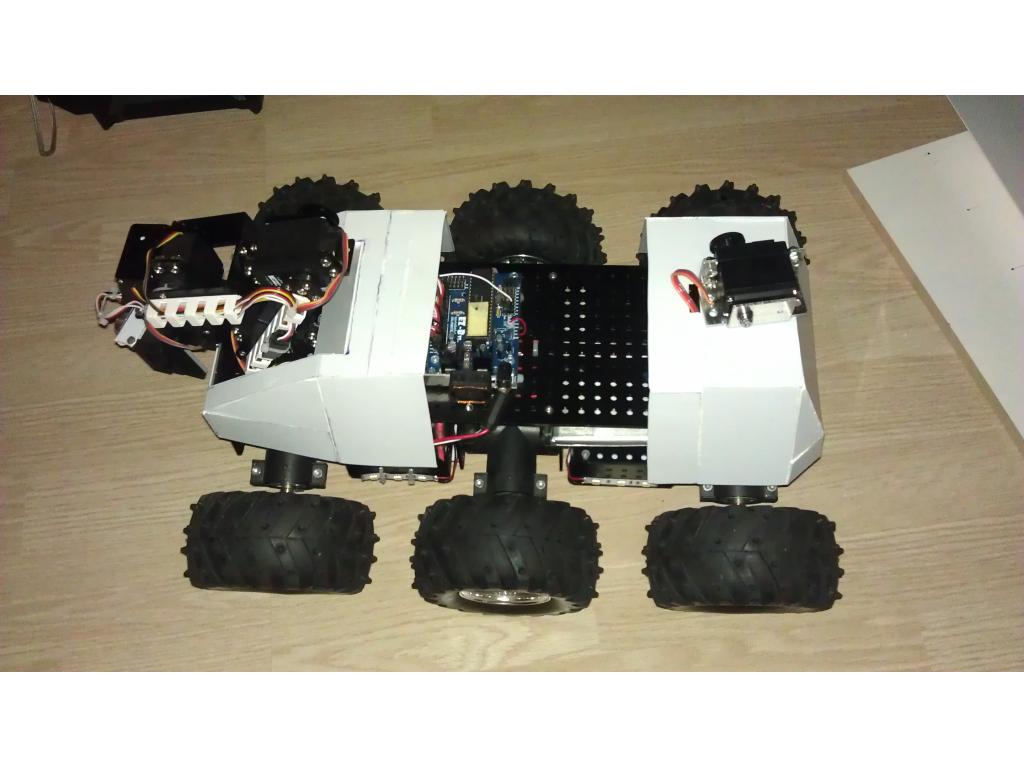


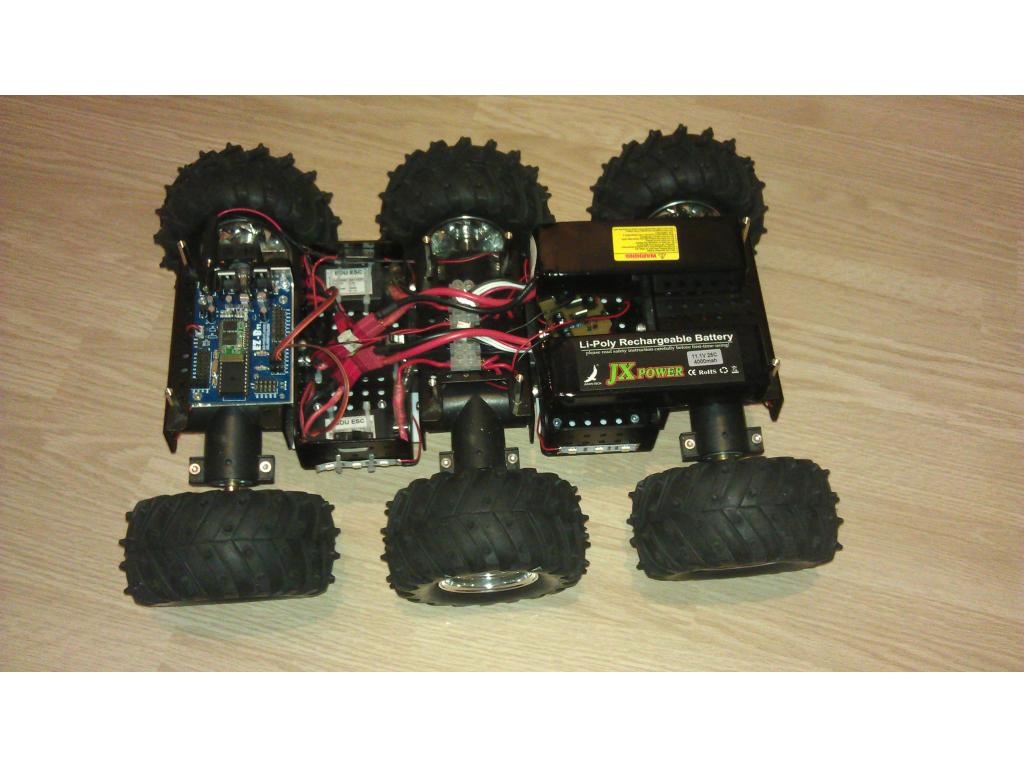











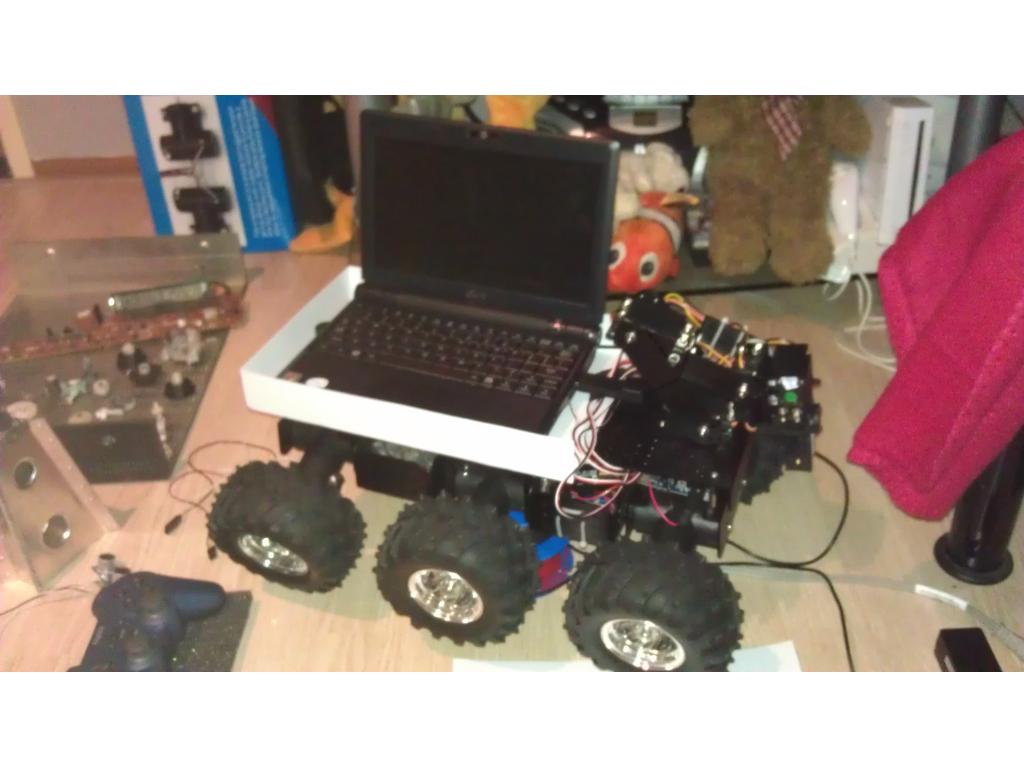
Hello fellow EZ-B'rs, As I finally discovery how to upload photos I thought it was time to share my robot with the world. It's called R.O.O.S.T.E.R which stands for: Remote Online Operating Scientific Testing Electronic Robot (took me about an hour to come up with that, but I like it).
The specs:
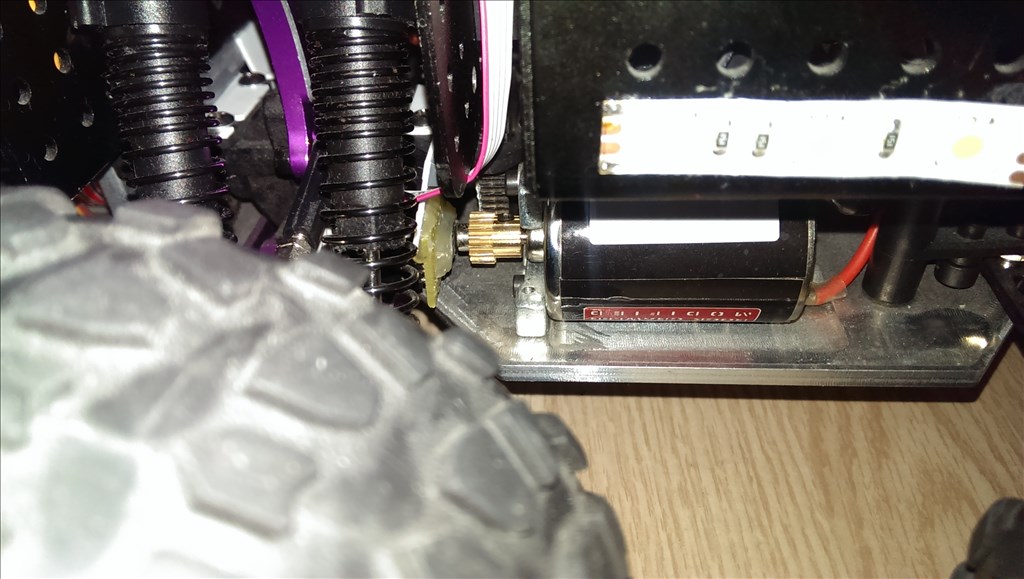
- 6x 6v 6A motors
- 2x 20A Rc Car ESCs
- 2x Reddragon 2s 25c 1200mAh
- Ofc the Ez- B
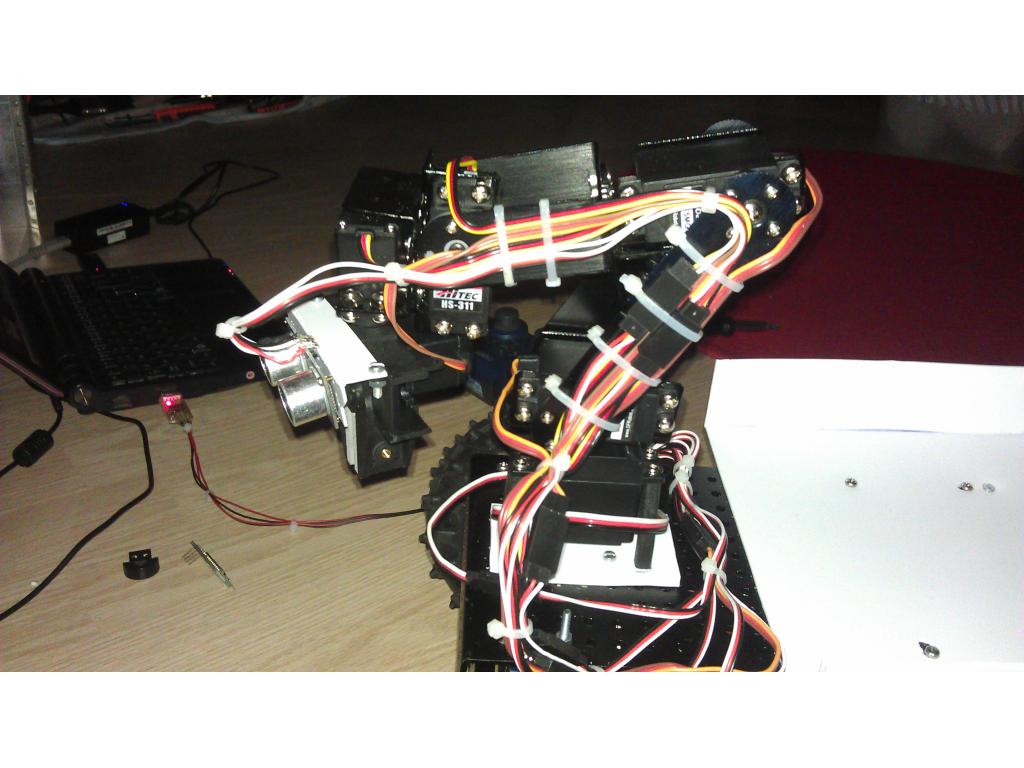
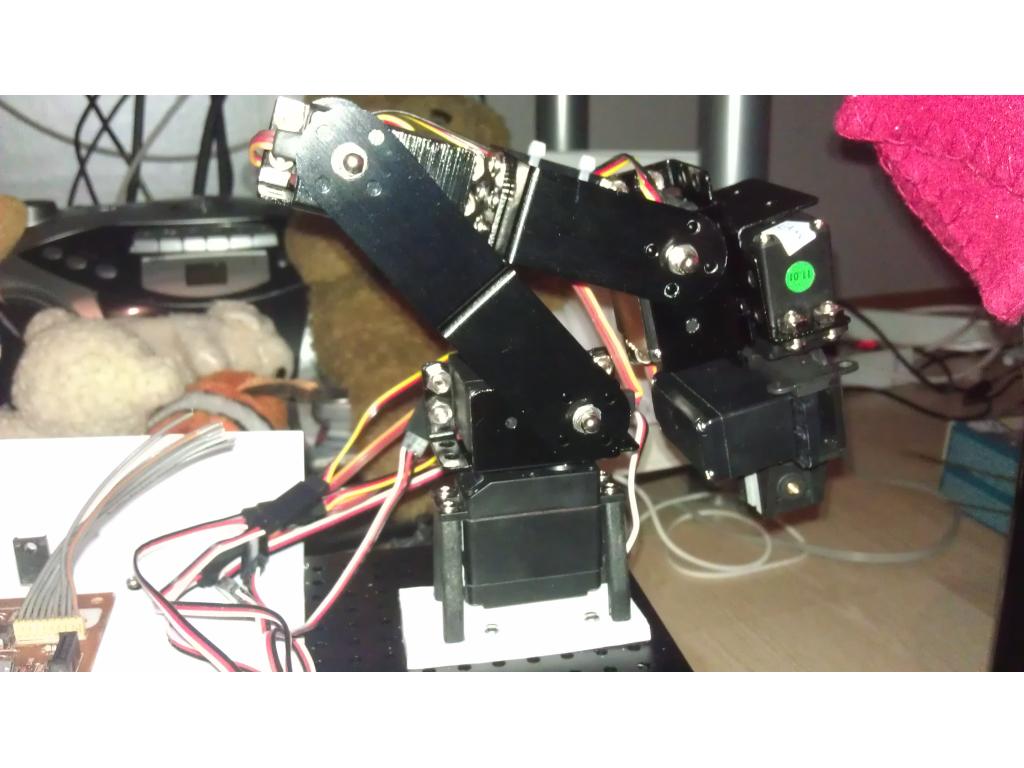
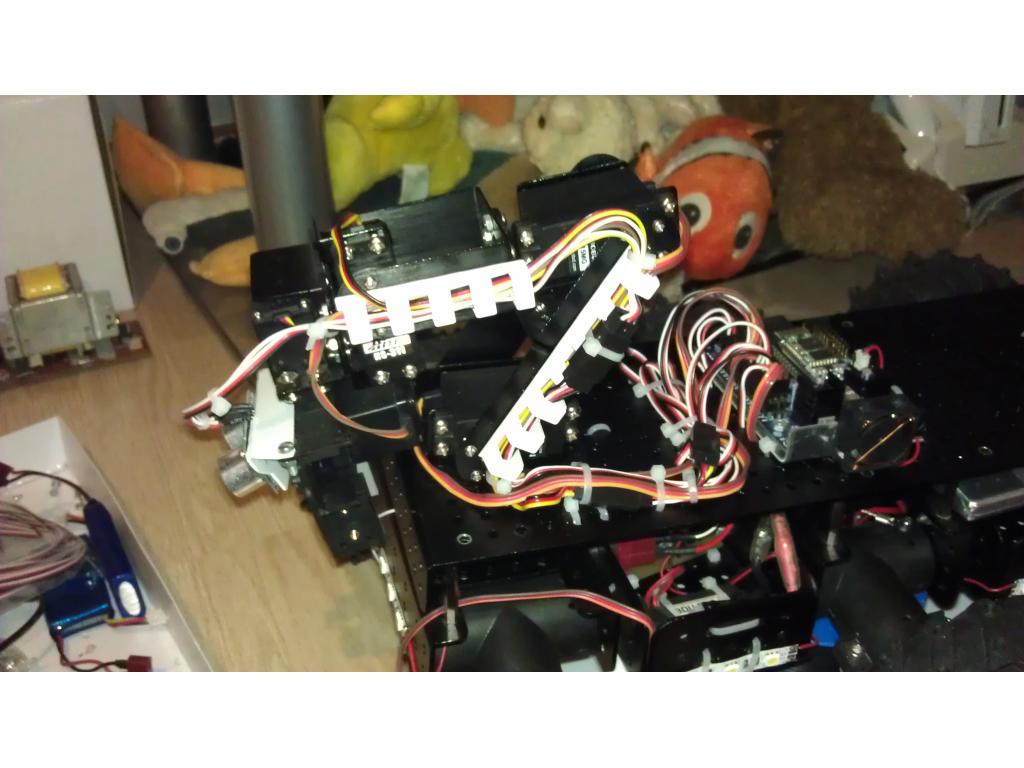
- Dfrobot 5dof robotic arm
- Asus Eee pc 900hd
- Ping sensor (well... I sort of broke it... It got stuck between the robot and the wall...)
Why I'm building it? Because I can, robots are Awsome, the EZ-B rules and I got tired of burning/shocking myself when I'm testing one of my "crazy" contraptions.
Up coming updates for robot:
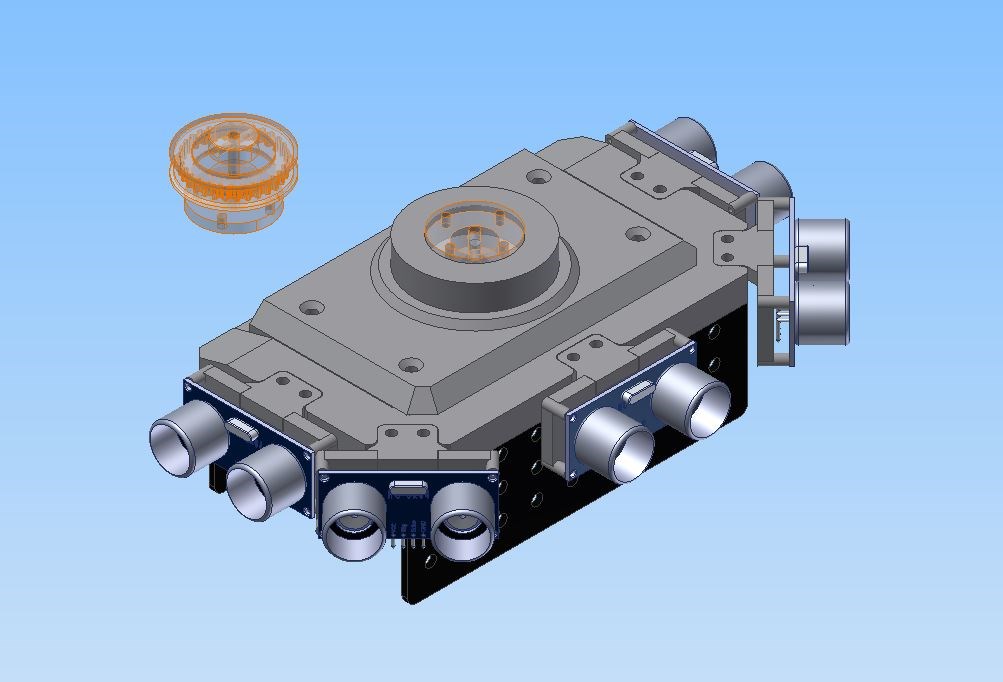
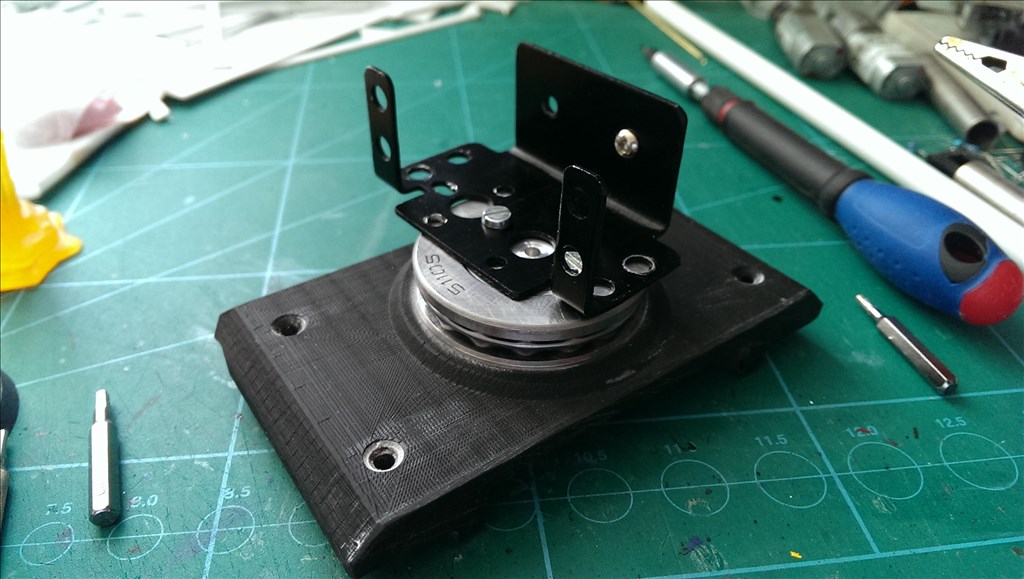
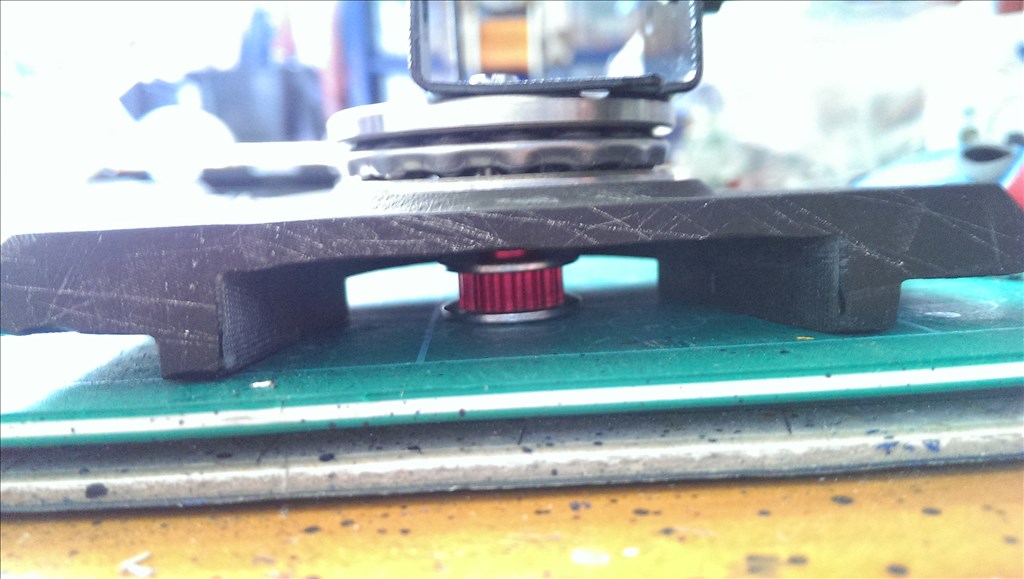
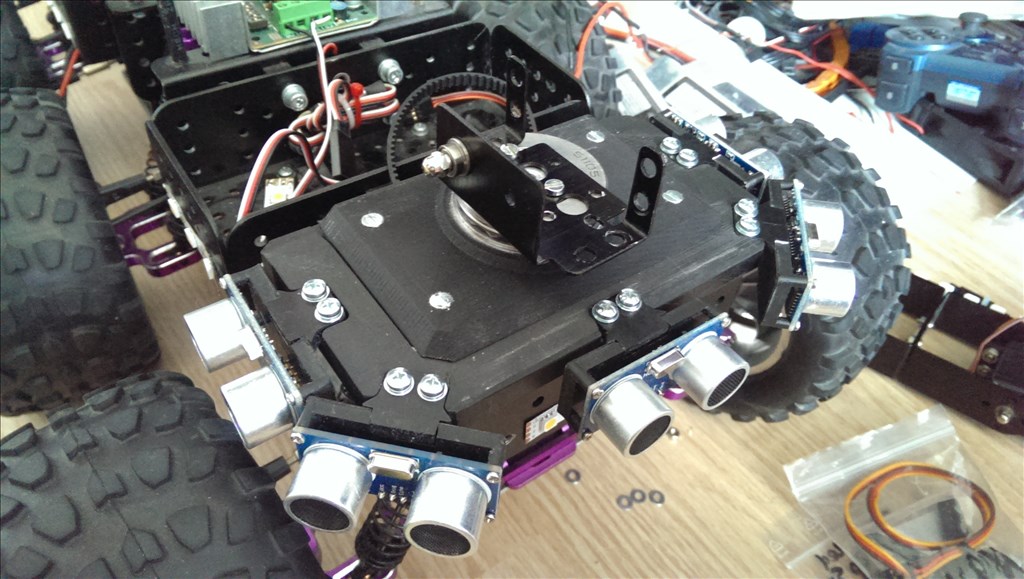
- A rotationplatform for the arm.
- 2 gigantic lipo batteries.
- camera+ pan/tilt turret.
- Small rockets
- mini mini-gun
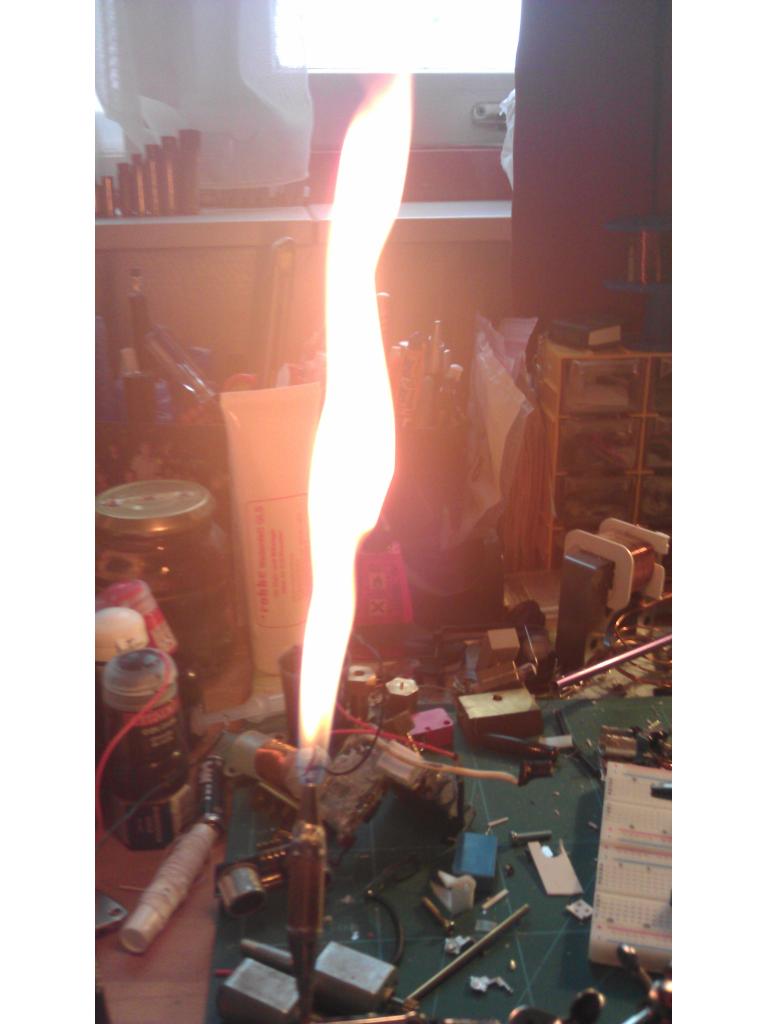
- Flamethrowler (a failed version of a liquid fueled rocket, but it's working if you call it something else)
- coilgun
- railgun
- Lots of other things I can come up with.
By budel0
— Last update
Discover more robots

Fxrtst's Introducing Alan
Build Alan interactive android head: modular, 3D-printed animatronic kit with 2025 video courseware, BOM links,...

Cliffordkoperski's HAL THE ROBOT THAT WALKS AND TALKS
5.5ft humanoid walks, talks-56 servos on 3 EZB v4 boards via WiFi, two batteries, onboard PC; Synthiam ARC scripting...

Mcjeff0125's Ez Rover Mark I
Control a Brookstone Rover with EZ-B using ARC software: removable EZ-B pods, battery/speaker mounts, Lego platform,...

Hallo budel0,
ik ben self net begonnen met mijn robot. 6 wheel thumper, en van daar uit zal ik wel zien wat de robot kan en gaat doen. net gisteren de 3 hbridges geinstaleerd maar vind dat die niet echt veel kracht aan de wielen geeft?! what beruik jij om de thumper te besturen?
heb wel 4 batterij packs geinstaleerd, stuur wel even een foto door.
ik zit in Salt Lake City, Utah. maar ben in Hoorn geboren. sorry voor de spelling fouten maar zit al 12 jaar in amerika.
groetjes, Ray.
sorry for the Dutch, i just introduced myself in our native language.........
Raybot ,
Hope you don't mind but I did a little translating on your message. How close am I?:
I myself just started my robot. 6 wheel thumper, and from there I'll see what the robot can and will do. just yesterday the 3 hbridges geinstaleerd but think that not much power to the wheels gives?! what budel0 you to the thumper to drive?
I have 4 battery packs installed in your PC, send it as a picture by.
I'm in Salt Lake City, Utah. but I was born in Hoorn. sorry for the spelling mistakes but he is already 12 years in america.
Regards, Ray.
Nice job so far to both of you. I love the lights budel0 Nice wiring job Ray.
Dave Schulpius
that's about right, looking at your screenname i guess dutch yourself?
Somthing I would recommend is to run an individual ground to each controller to your battery. Bad grounds are know to cause issues and restrict power.
@Raybot Cool, leuk om weer eens van iemand die uit ons kleine landje komt en toch ver weg zit. Oh en weetje wat toevallig is, ik woon in Hoorn !
Voor de rest zal ik het in het engels houden zodat de rest het ook begrijpt ^^.
I'm currently using the 25A dual channel motor controller from Sabertooth and it's working out pretty well for me. Eventhough the manual and specs don't support nor recommend connecting 3 motors per channel, it does work. One of the disadvantages of how I did it is that I connected the motors parallel. And by doing so I increased the amps per side to 18A instead of 18v. I did this because I don't want to use converters or other things to power my other contrapsions that I tend to attach to my thumper. But if you increase the amps you need thicker wires and I've noticed at my work and on internet that no one likes using thicker cables. With high voltage you won't need thick cables.
But to be honest I'm not really an electronics expert, but I do great with mechanics ^^. I always look at what others do and if I think that'll work I'll try it myself. I used to power the wild thumper with 2 rc speed controllers. But after 1 year of abuse the cheap Chinees stuff failed on me, so I switched to the 25a dual channel sabertooth, looked at vids and reed reviews and thought it was the best option. Though it is very expensive (paid like ?120,-) I believe it is worth it. It has a 50a burst per channel so I think it can only die when you: put water on it, throw it of a cliff, connect it wrong, or set it on fire.
Your best option is to try what jstarne1 said, take another look at your wiring. Because what I see in the pictures is that the motors are connected parallel. To control the thumper with the 3 h-bridges is by connecting each motor to a channel on each of the 3 h-bridges(3 h-bridges/6 channels), I think that was the plan right? You should get more power when you have that.
dschulpius You are really close
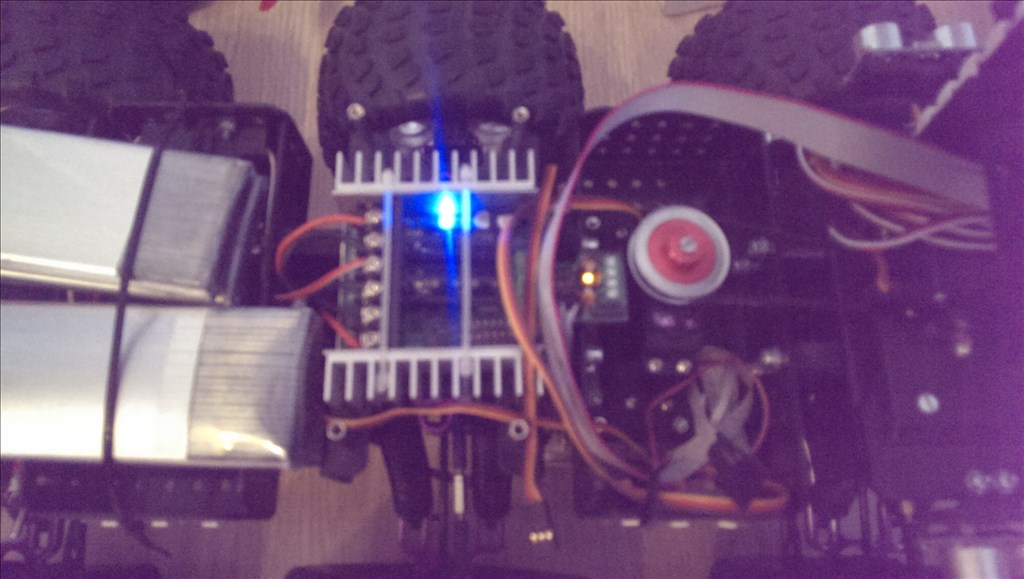
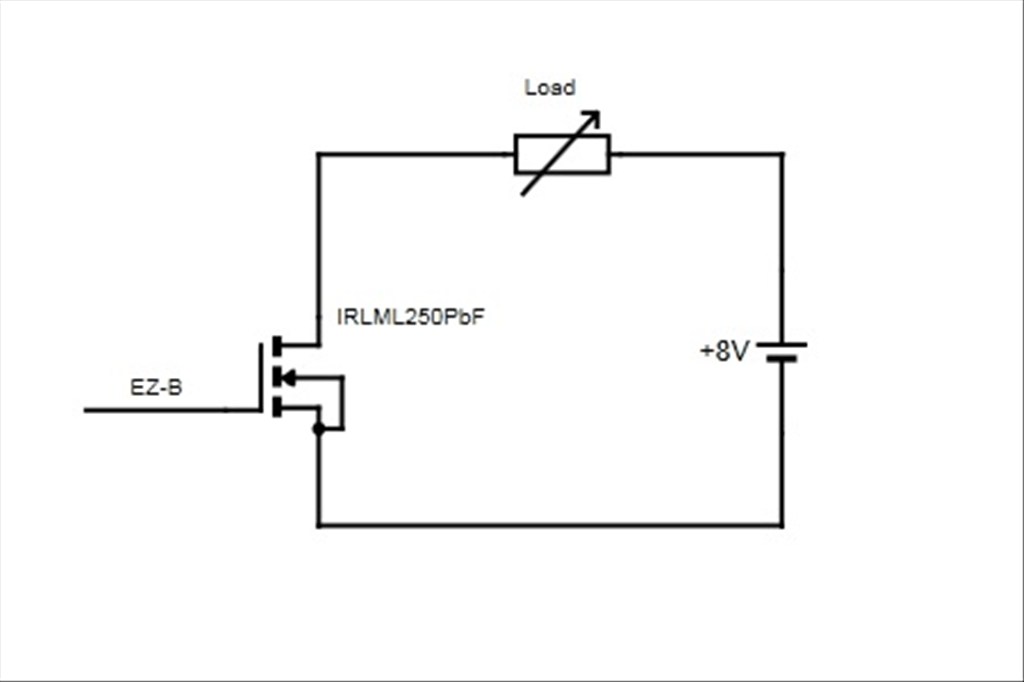
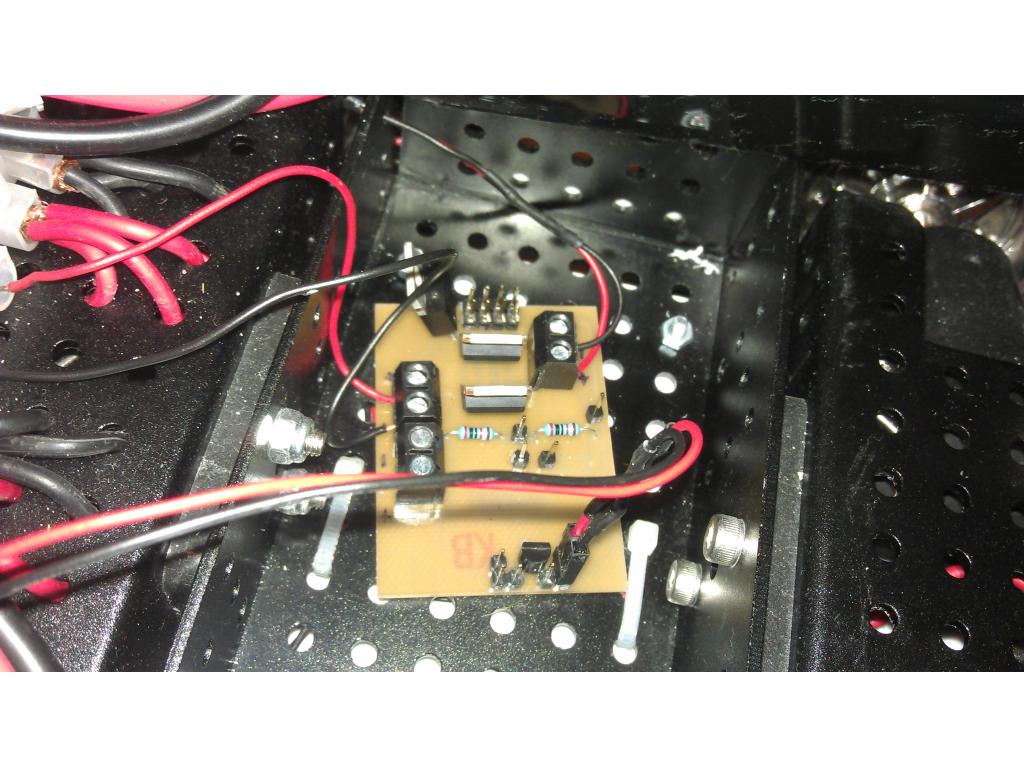
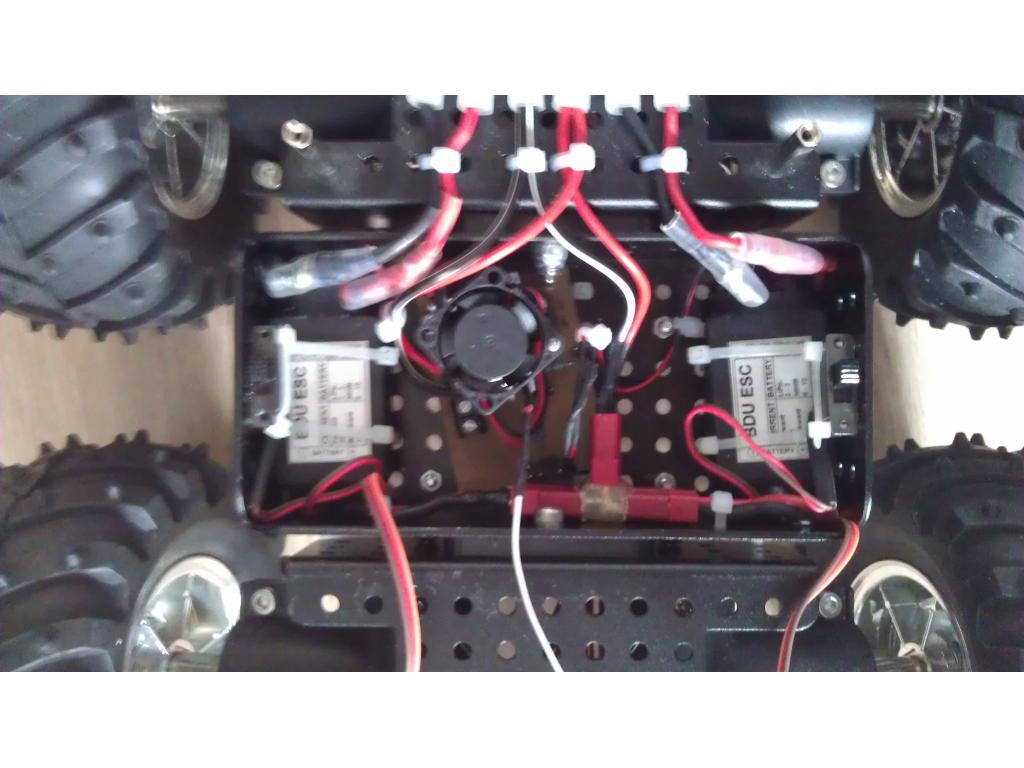
Small update of what I've been busy with: For the last weeks I've been having shortage problems. I managed to burn through 5 fuses that are on the EZ-b, for those that didn't know, there is a fuse between the 2 heatsinks(the yellowish thingy). And from this I've learned that anti-static foam is a very good conductor and should never be used as an isolator. But got most of my custom build things back to work and my EZ-b still lives eventhough I almost fried it.
Since the incident I have placed fuses between my sabertooth (40A), my surround lights(3A) and to the top half of my robot(the arm, lights, camera, sensors, etc)(10A). Since then no more things got fried.
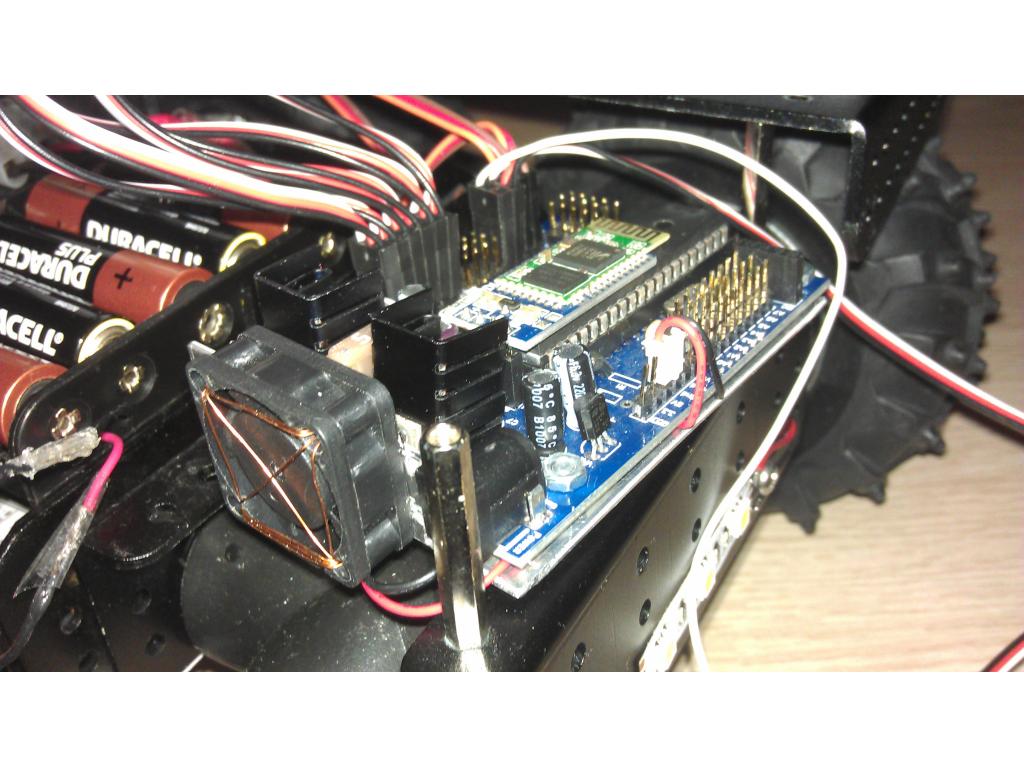
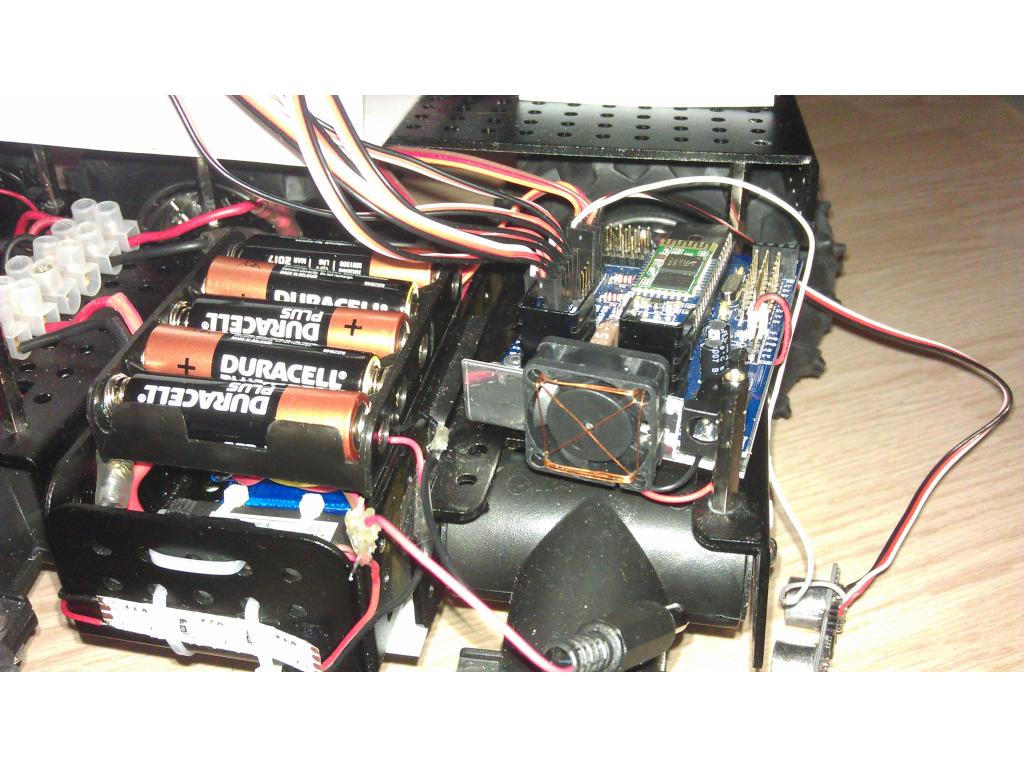
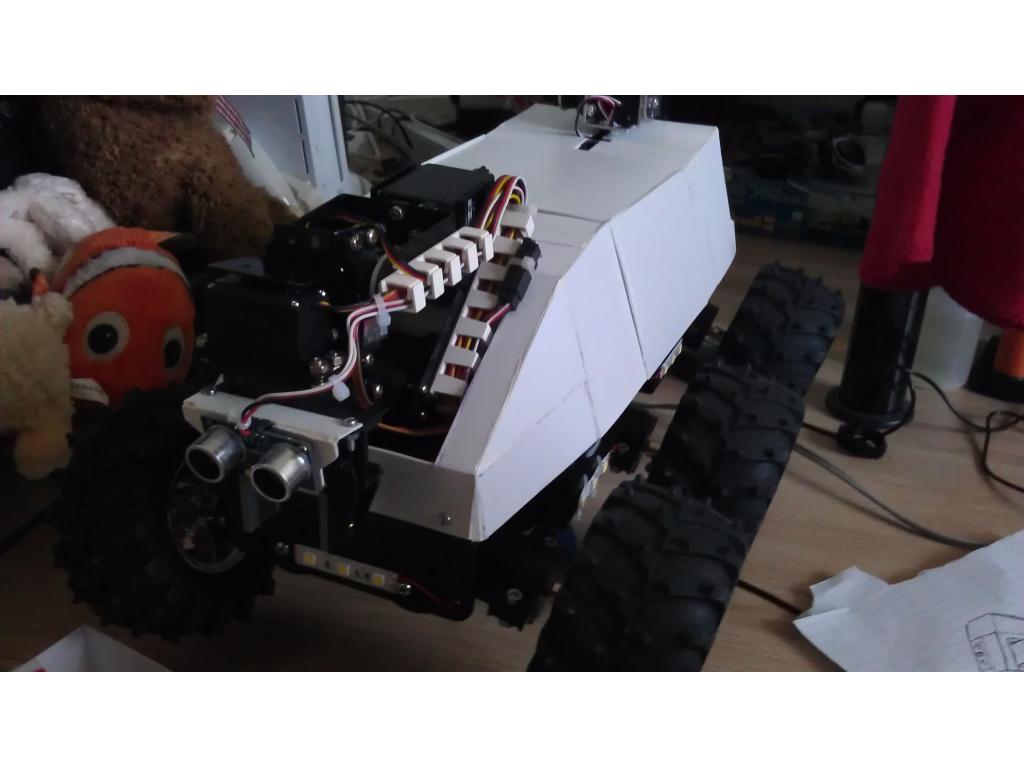
Also I changed the angle of my Synapse tranceiver with 90 degrees sideways this optimises the transmission bubble (as I call it) to around te robot instead of just over the front and back. It should also increase the signal strength and range. This will help me with my wireless camera tests. As I have a 10mw camera but it uses the same frequency(2.4ghz) as my Synapse tranceivers, but the tranceivers use DSSS so they shouldn't be bothered by it, but you never know for sure... In the end its 2 devices screaming very loudly and the one screaming the loudest will win. I hope my tranceiver does, I dont mind some interference with the video images, but if my controller keeps disconnecting every 2 seconds it'll be annoying. But that is still work in progress, still have some electrical problems, so those first then fun stuff.
@budel0 i will look at my H-bridges and wiring next days of. One of the H-bridges isn't working anyway. Waiting for the new one to arrive. I did connect two of the motors to each H-bridge, But i will ground them separately as @jstarne1 is saying. 6 channels one for each motor. for now i will play with the H-bridges (spend enough the past month in getting all the goodies to start my new hobby) swapped my Jeep Rubicon for a robot hobby.
That's funny you live in Hoorn. I was born (Wever in de risdam) and raised there. Bunch of my friends still live there. I normally get back home every two years. Will be back in September for my wedding and my parents 50 year anniversary.
I see that you are using a different camera the the one that comes with the EZ-B kit? is that for any specific reason?
Thanks for the response and i will keep you posted.
Ray
@Raybot When I started my robot project, EZ-Robot didn't have a kit yet, so I found one myself. When I bought it, it came with a crappy receiver that broke after a while. Searching the web for a new one took me a long time (https://www.fpvhobby.com / note: that you can't connect them directly to your pc, atleast most of the receivers don't). But in combination my camera and receiver they get me about 30m range thrue walls and stuff, maybe more(didn't test it further than that).
The main reason for buying a new receiver was that I wanted to test the combination of my Synapse tranceivers(the red and green thingies I use to connect my robot to my pc) and a wireless camera system that works on the same frequecy(2.4ghz). Usually combining the two will cause problems. But as my tranceivers have DSSS they shouldn't have any problems. But until now i have had problems, but I still have to do one more test to see if it's going to work out and else I'll switch to a 5.8Ghz camera system.
The thing I changed between last test and the one I still have to do ,is that I changed the angle of the tranceiver on my robot. So I should have a better signal.
Once I've tested the combination and it works I'll buy 2 camera's(like 720p), 1 transmitter(2.4Ghz) and something that I can use to switch cameras with. I'll place one on the front and one on the turret. If the test doesn't work out I'll first try it with a 5.8Ghz system(transmitter,camera and receiver) and then add another camera(if it works).
My goal is to get great range, something like 100m and I want to have a good quality video on my tv or pc (once I have an AV to usb converter).
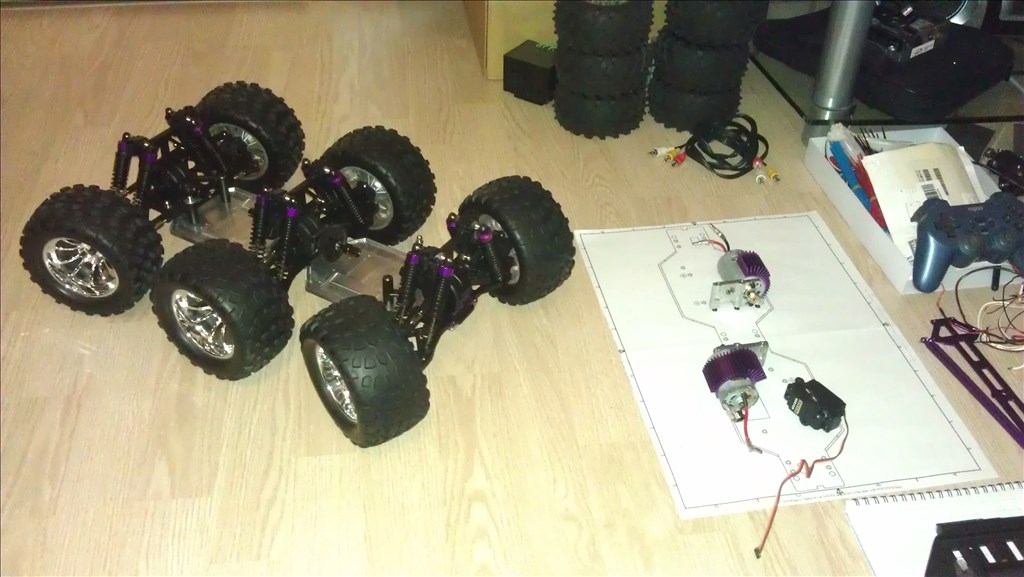
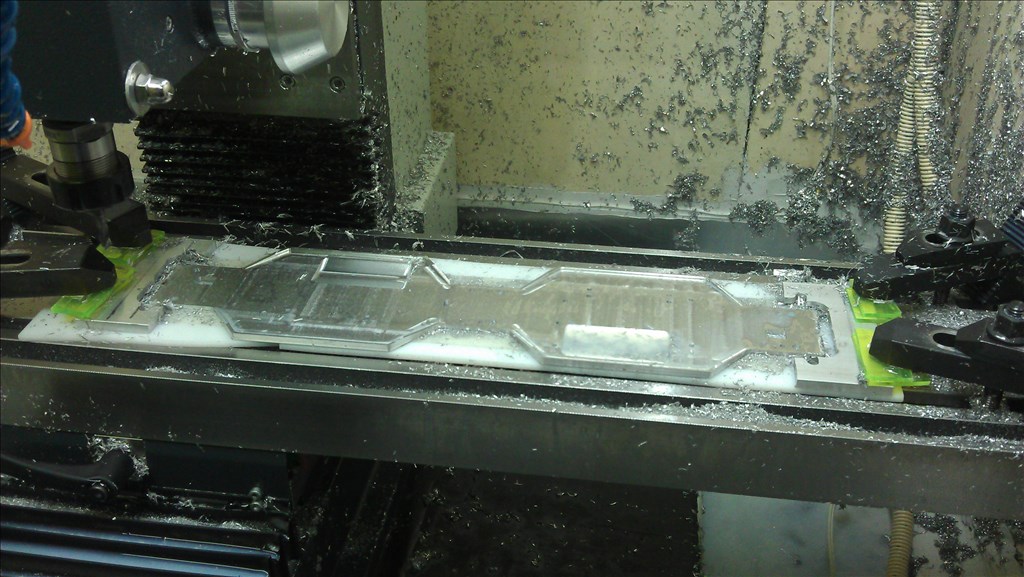
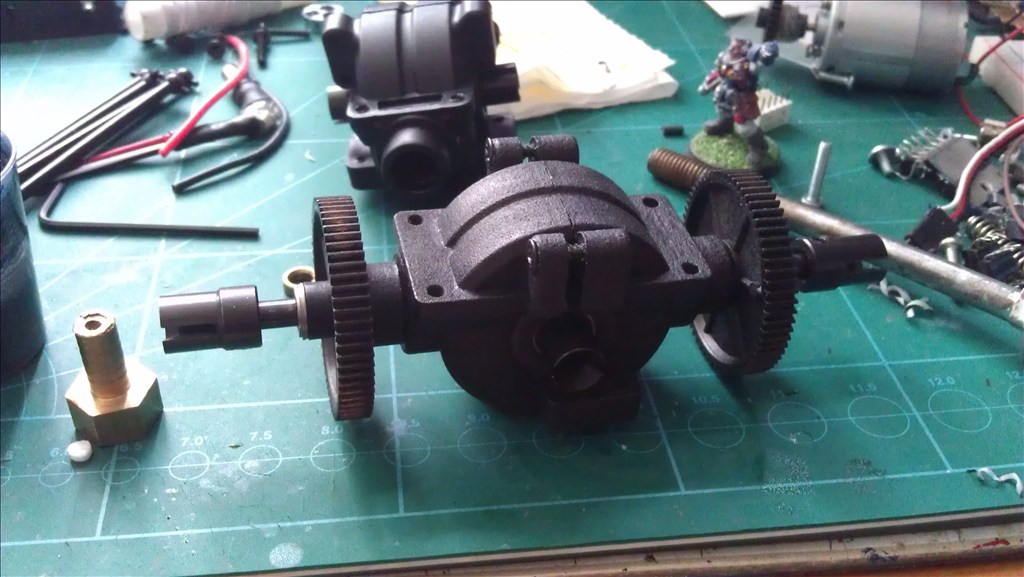
After testing the antenna changes I can conclude that that a 2.4ghz camera wont work in combination with the synapse modules. This unfortunate, but sort of expected. Now better news. Since someone shared the link of the video with a MyMindsSi 6wd chassis, I've been blown away. It looks cool, works great.
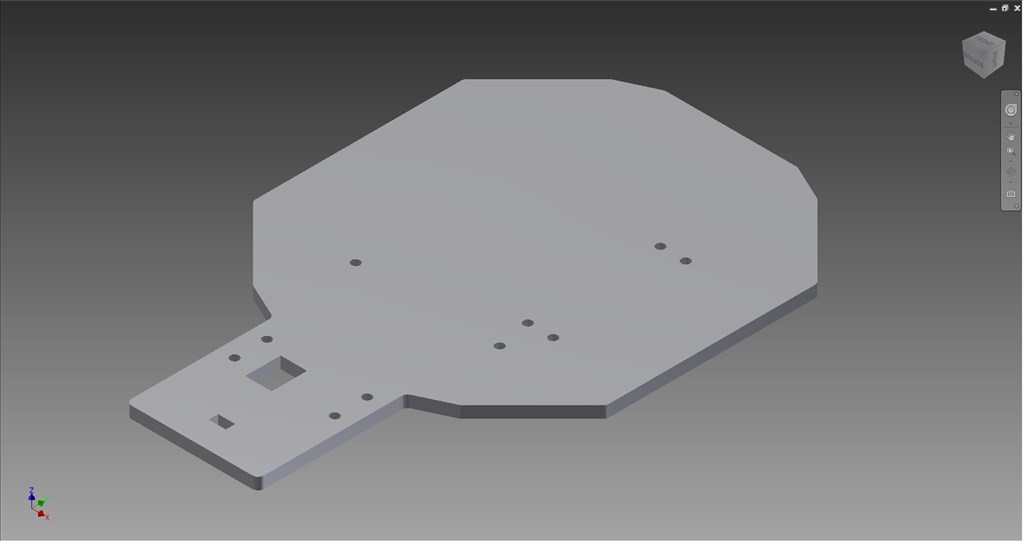
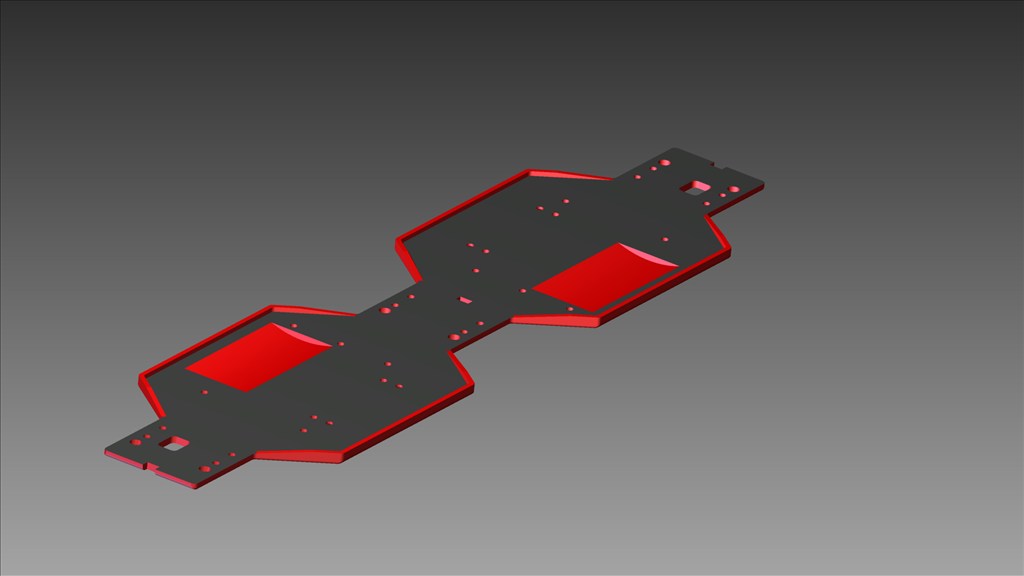
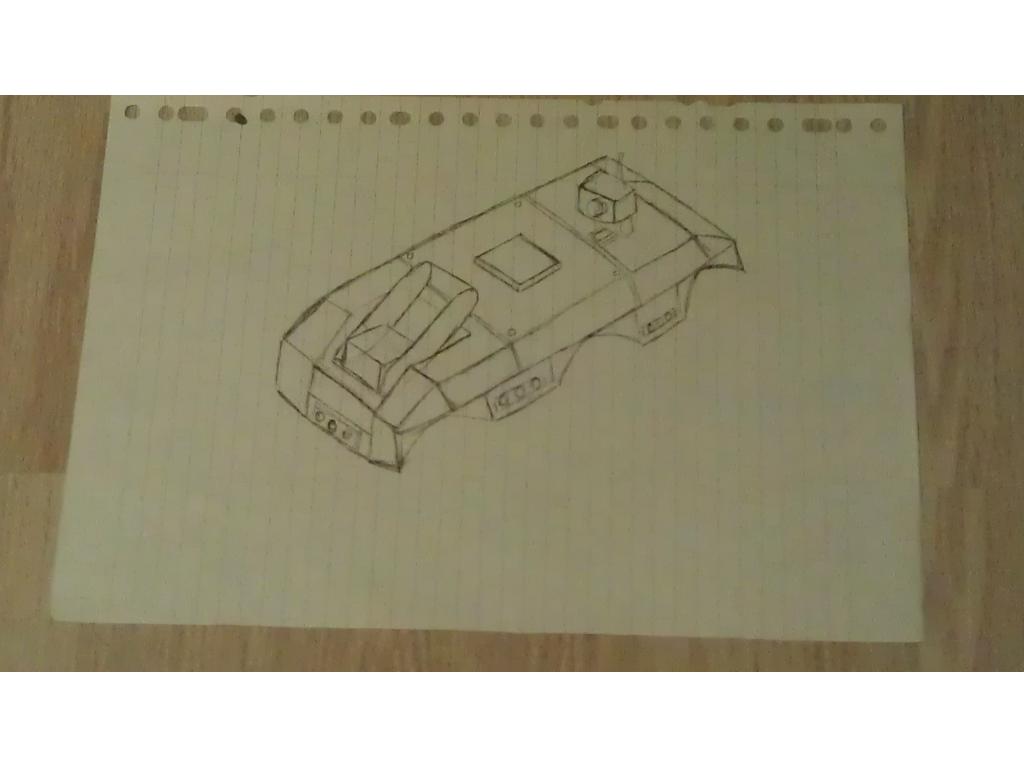
So from this point on I will be converting my dagu wild thumper in to a 6wd car with front, back steering, individual suspension and powered by to motors. This will be a great challenge and I'm looking forward to starting designing the frame. I've already picked up 2 Rc monster trucks for parts and very soon there will be a new R.O.O.S.T.E.R.