
Hi
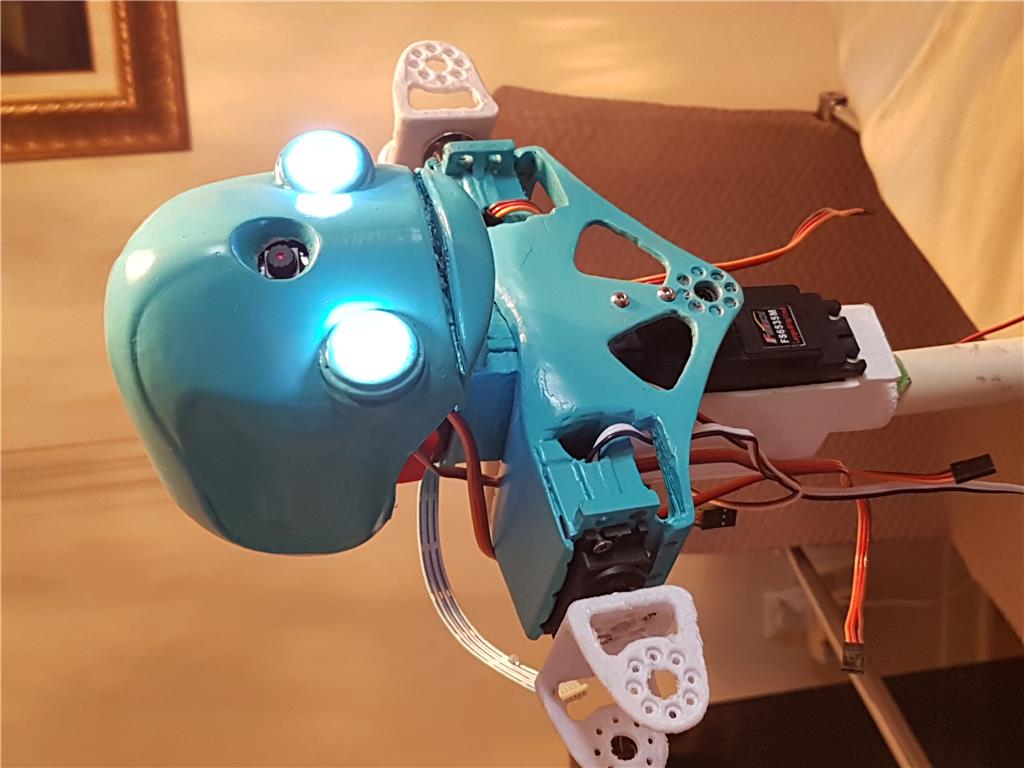
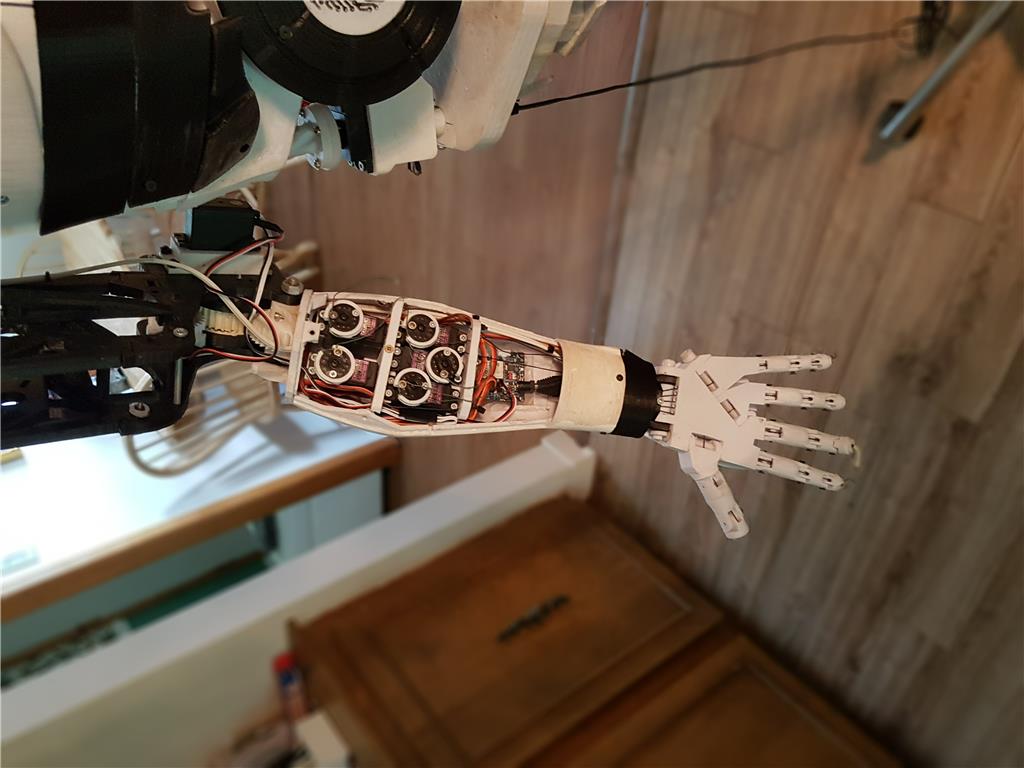
I have been printing the files that were generously supplied by Mickey666mauss for his creation of Zoe. I was interested in the original Zoe head as it just appealed to me as I wanted to have a socially interactive robot and I feel that robot would not be viewed as to human looking and get a negative reaction. like my inmoov and buddy my human looking robot head seem to get on occasion. I wanted to have my Zoe have a mouth so emotion could be verbal. so I have added a mouth on zoe which I think looks very good and also works very well. Other changes I have made to Mickey's design, I have a lot of regular servos mostly metal gear, I decided to make my version of zoe with standard servos and using a EZ-robot V4 Controller as this is what I am more comfortable with. of course I had to alter the parts of zoe to fit standard servos, which was not an easy task as I feel I am not that good with Cad design. but I managed to make due. This version of Zoe will be mobile mounted on a mobile base and I have lots of design to complete to make that happen. My version of Zoe is not complete but most of the parts have been printed. I have had a belt self destruct on my delta printer and I am waiting for a replacement and during this pandemic it will take a while. the arms are almost complete but I will add pictures of that and Zoe moving later. the pictures I have downloaded show Zoe and Zoe with eyes illuminated. the camera is also installed the lights are bright so Zoe can see better in the dark.






very nice and the robot has torso movement also. i made a pic for i, the movement panel.
@Nomad6R Thanks The issues I am having is it is difficult to get supplies during this pandemic. PETG filament was hard to find as they are using it to make face shields for the first line workers as it is odourless and non allergic. my printer started to print bad see the shoulder pieces which I have to reprint. started to print rough. one of the belts was worn on the printer and I did not see it. it takes weeks to get another as the mail is priority shipping. I will work on design I don't like a pole holding ZOE to the mobile base I think it looks bad so I need to make something else. maybe like this,
yes that a cool design off the robot.like it alot. i got my camera today but it was damage .
how did you notest your belts where worn out?
.
how did you notest your belts where worn out?
@Normad6R I started hearing the printer it sounded bad and when I was doing bed leveling it would jump. The walls of the print had lines and was uneven. On another note I like the screen on the robot picture I posted I will have to think on what kind of screen to use. if anyone has ideas? please give me suggestions. thanks.
lesson learned.thanks.
Hey there, I already wanted to post this morning but I was out of time... I am really happy to see this remix of the early ZOE, this is exactly what I was hoping for!! To share ideas, and have them evolve!!
Great design and I really like the look if it!! Did you use Spray Paint?
Looking forward to see this project evolving, maybe we can brain pool ideas! I also wanted to put 2 DOF to the torso soon!!
Made me really happy to see this @nallycat
P.S. a am having a worn y axis belt to...but if you print stuff that is not having to travel too much at this axis, its still OK! But, replacing or tightening the belt should fix it!
Thanks Mickey Yes I thought my Zoe needed some color it is teal and I did use spray paint. The shoulder pieces were not that big and they didn't turn out that good, and will need to be printed again, I have been designing hands I have some metal gear micro servos they should work fine. Did you like the mouth I added? I am also working on a mobile base, have you thought of making your Zoe mobile?