

















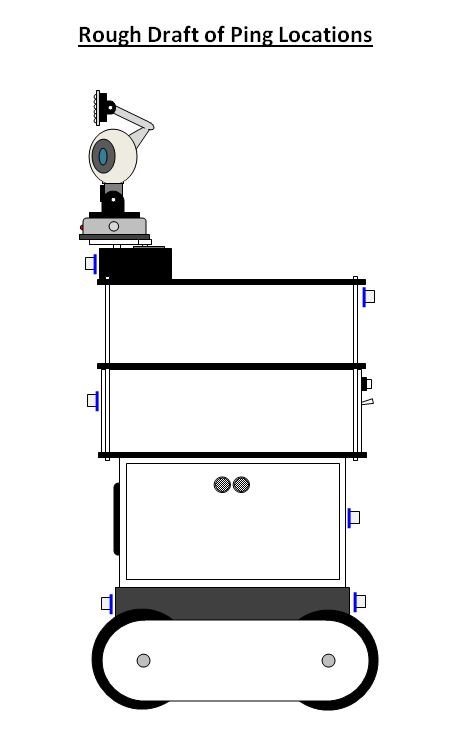
Introducing Questor.
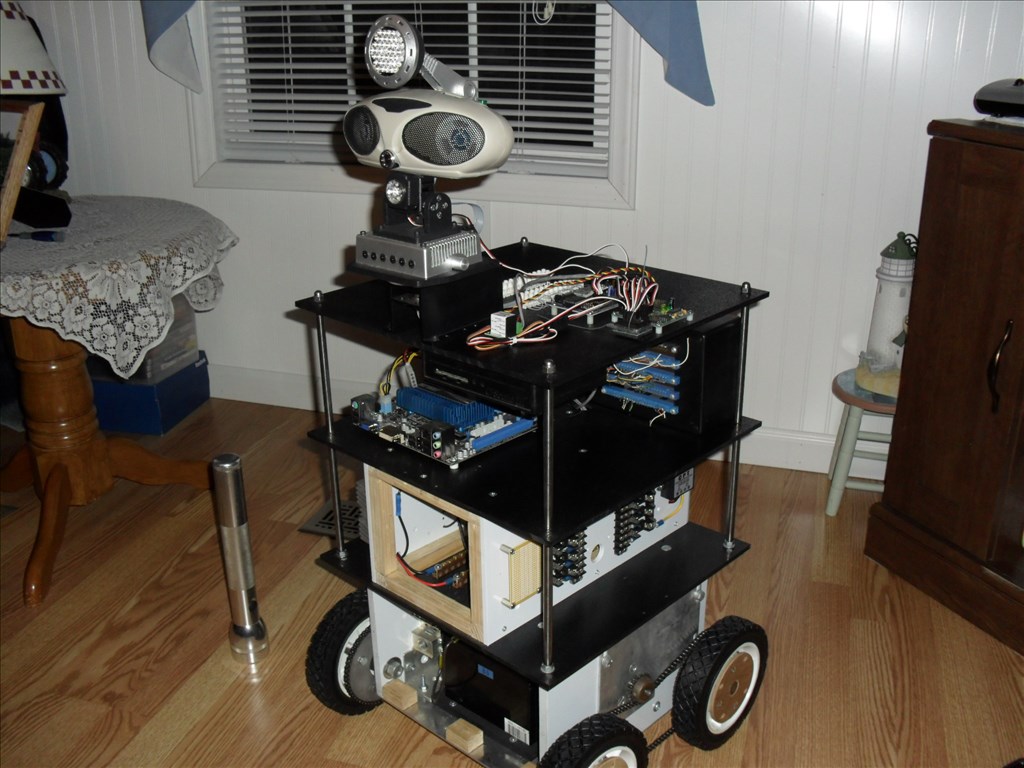
I put a hold on my large robot project Magnus awhile back due to budget and time constraints. I wanted to have a platform that was way smaller, easy to modify for testing purposes and small enough to roam around inside the house autonomously. Questor will serve as a test platform for systems that will eventually be placed in Magnus. Questor was not intended to be a cool looking robot platform, just functional and very basic in appearance. My main goal is for him to be autonomous with the option of me being able to take over remote control separately if needed. I would like for him to be able to automatically find and connect with his battery charger and to eventually have a good A.I.
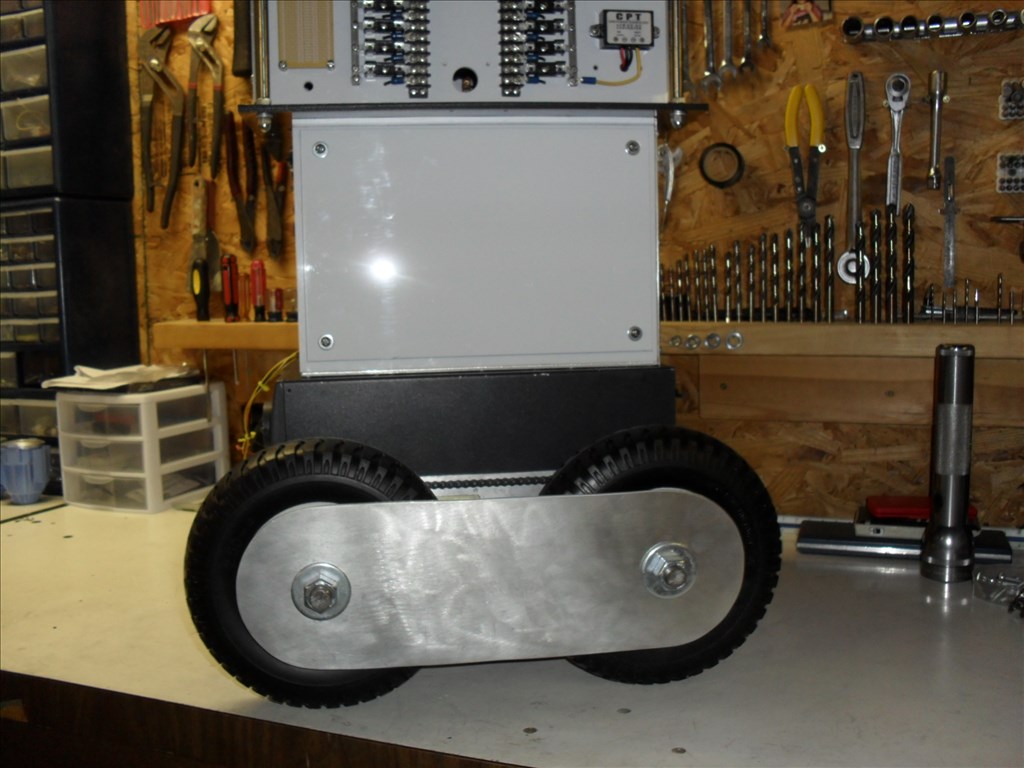
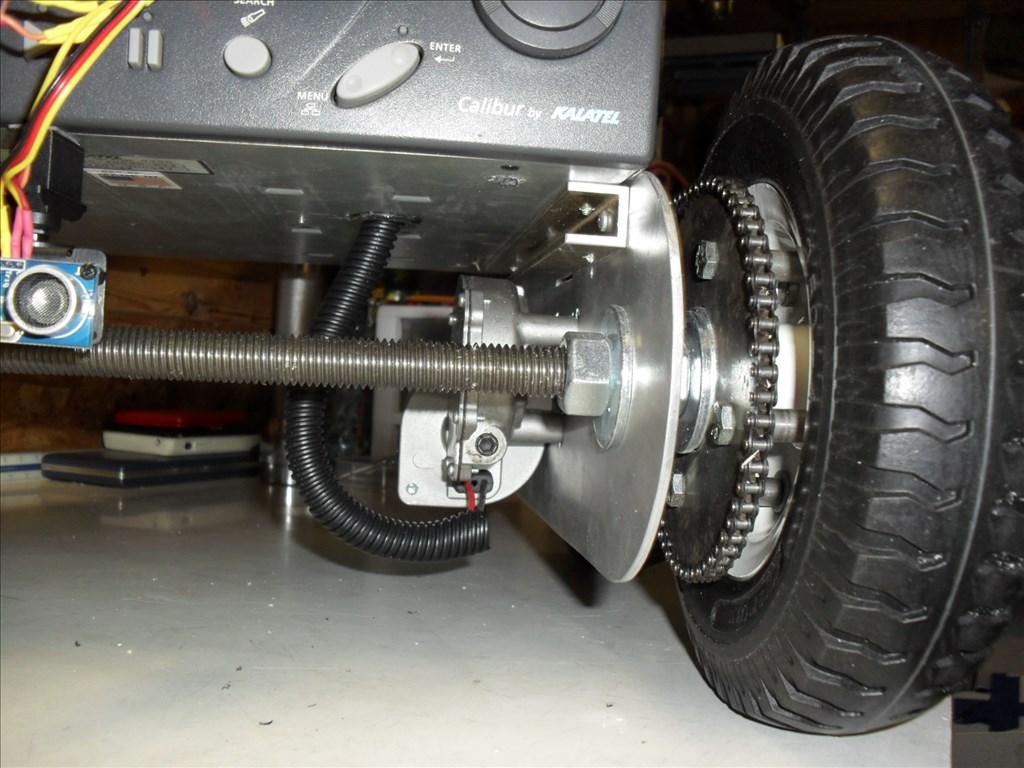
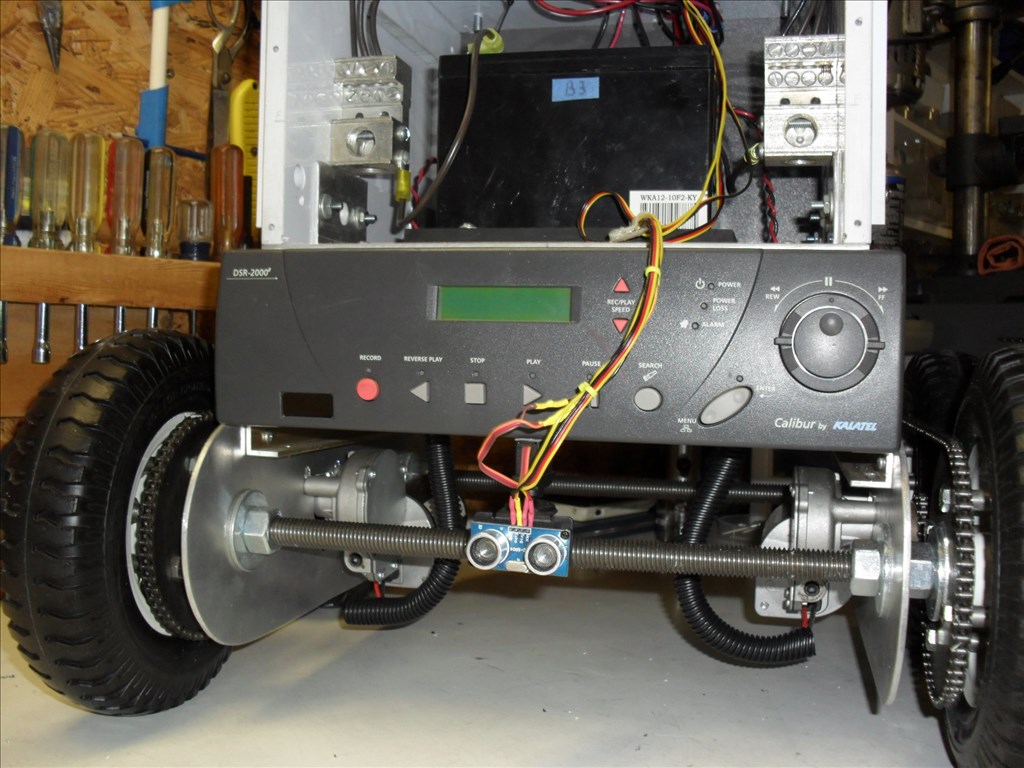
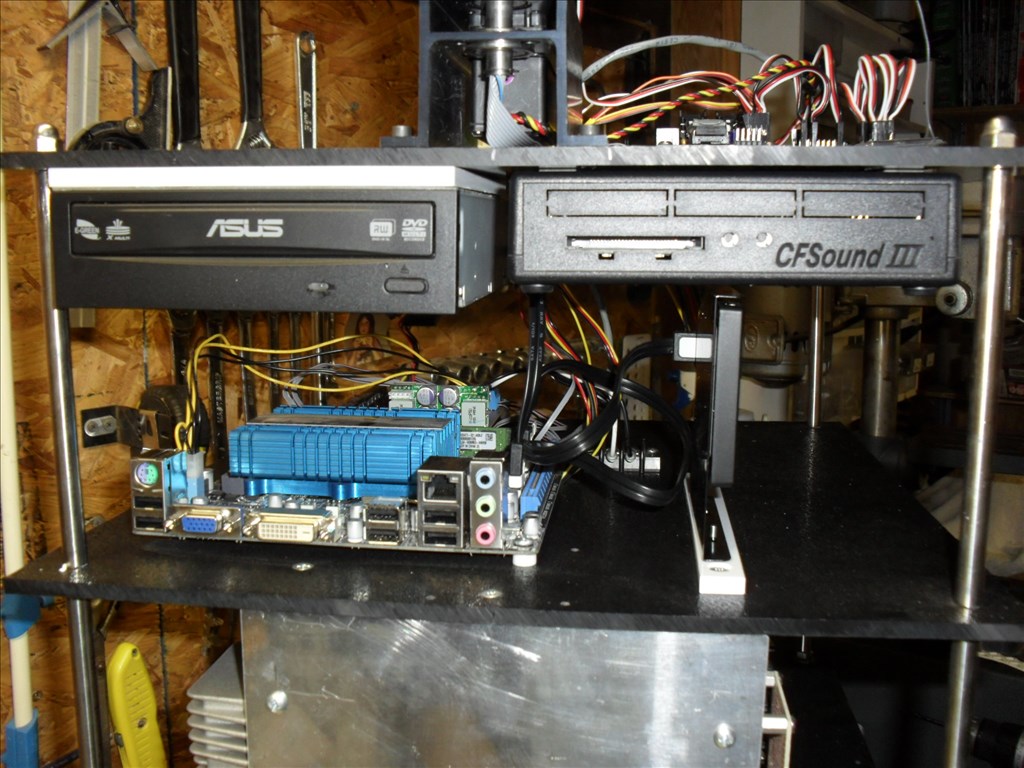
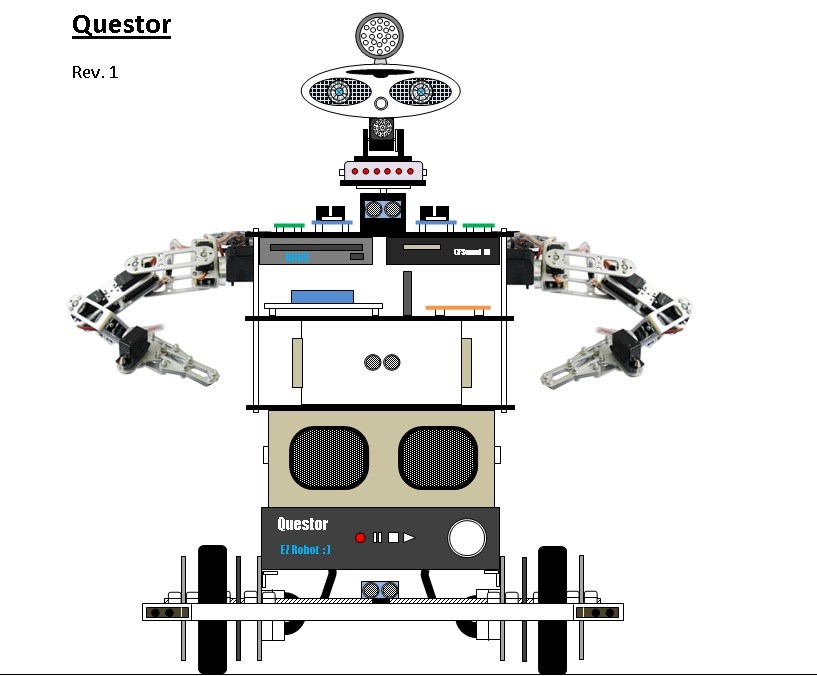
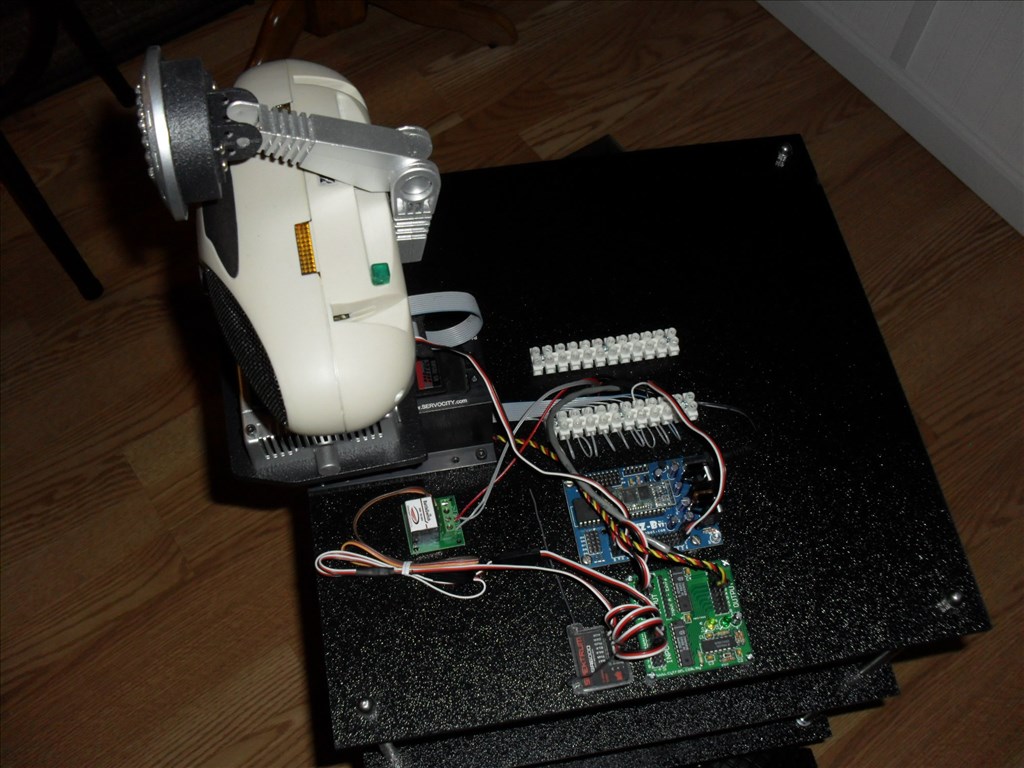
So here is a first look at him...
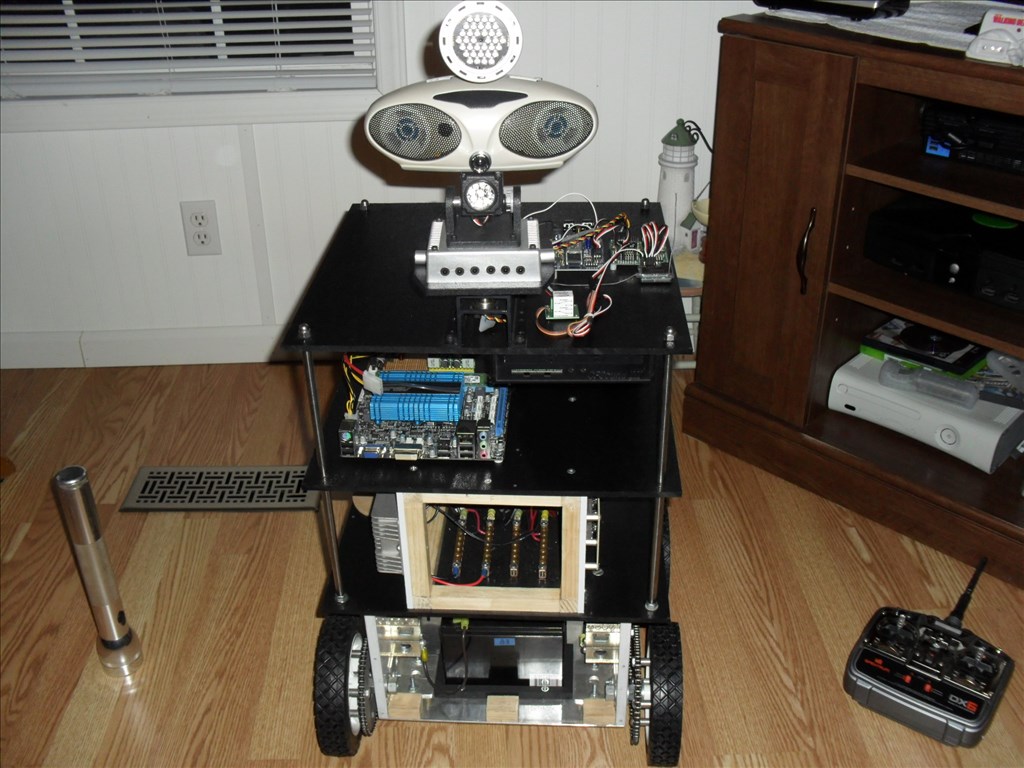

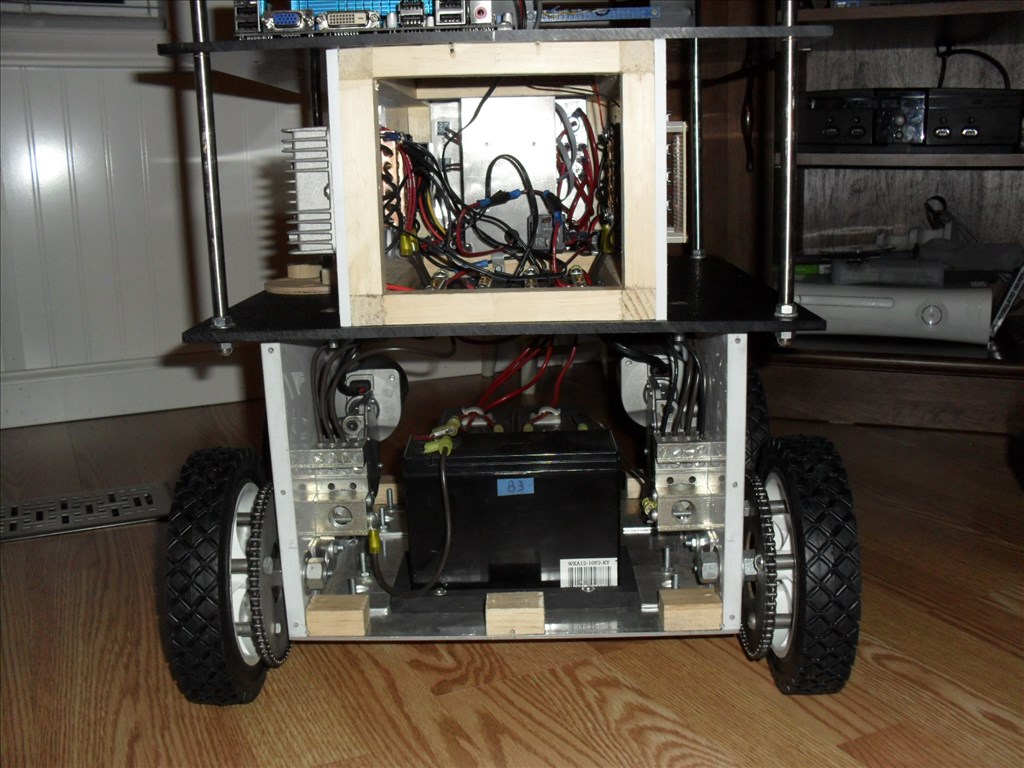











Weird....the pictures below [b]this line were not intended to be here in this first post. When I made the new post below, it saved the pictures in this post also. When I tried to go back and edit them out of this first post they don't show up on the thread so I can delete them. They belong in the post below....see details for the new wheels in the later post.[/b]
Discover more robots

Rentaprinta's Moveo Project

Lumpy's Lumpy's Wall-E


@bret.tallent
Thanks Bret! Sure wish you could have made it to the the fair. Are you getting much time to work on your robots?
Not yet, just moved into our house this past weekend and haven't got my robot room set up yet. Hope to be back working on bots by the end of the month though. I sure wish I had been able to make there as well. Next time!
BAD news about too much noise,very hard for others to hear what your robot is doing and ask questions.
BEEN to faire's like that and it was hard to understand anyone talking,thinking the set the tables too close together is one reason, ANOTHER is if inside its a lot harder to hear anyone,most of the MAKER FAIRE'S on the site are outside and use a much bigger grounds to set up in.
You can't really expect a faire to be quiet though, if it was then something is wrong.
The "noise" does add to the energy and excitement! ...It's almost like being there! ...and Questor IS looking regal!
The noise is non stop and after hearing it for several hours it is very stressful. But, I had a great time anyway and enjoyed meeting Josh and his brother.
I hope soon to get back to TENN ,i got a few zoo's i didn't get a chance to see more of,and my favorite place to eat country food,plus to see some country stars and stop to see JOSH
REX hope to see many more good changes to QUESTOR,i did a lot of work on my projects but dont want to post photos for only a few people to see.
Now trying to figure out how to add music to the video I will be uploading soon.
Upcoming items: -Replace the defective power switch for the motherboard and increase the wire gauge to it. Also if needed I will install a
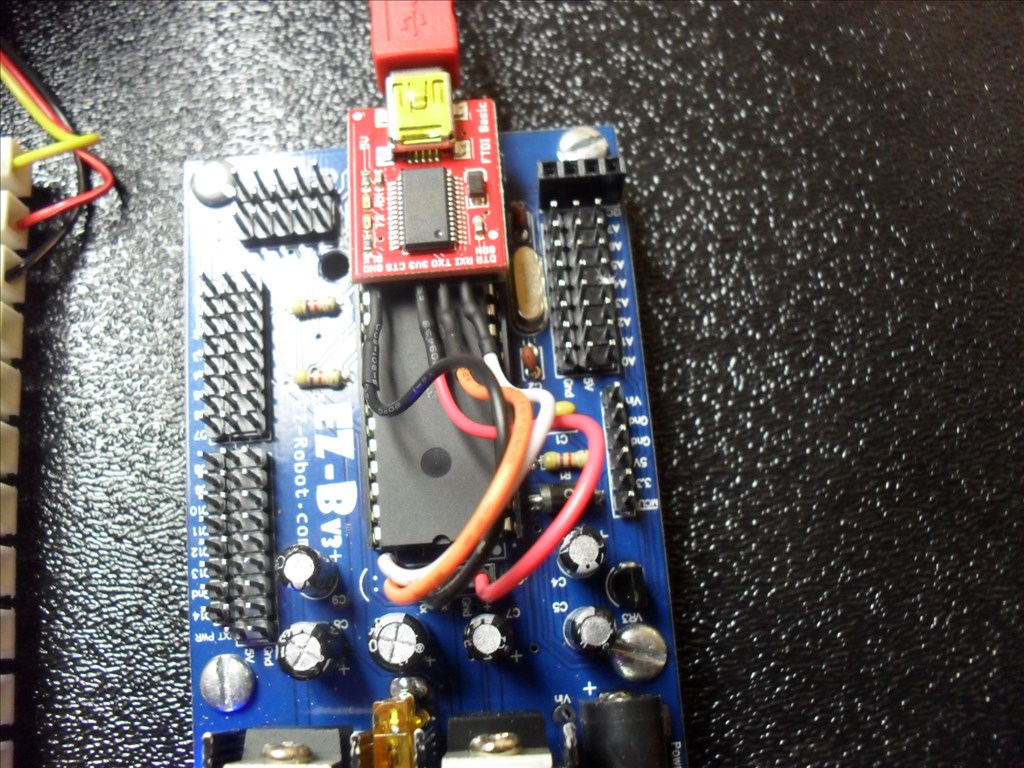
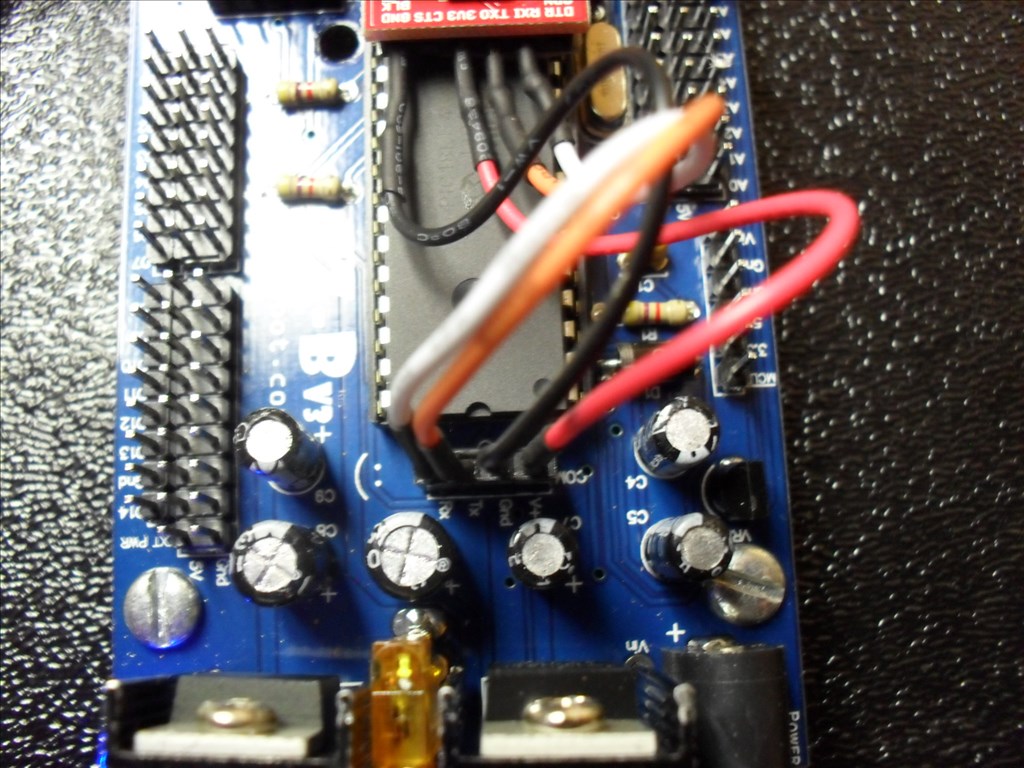
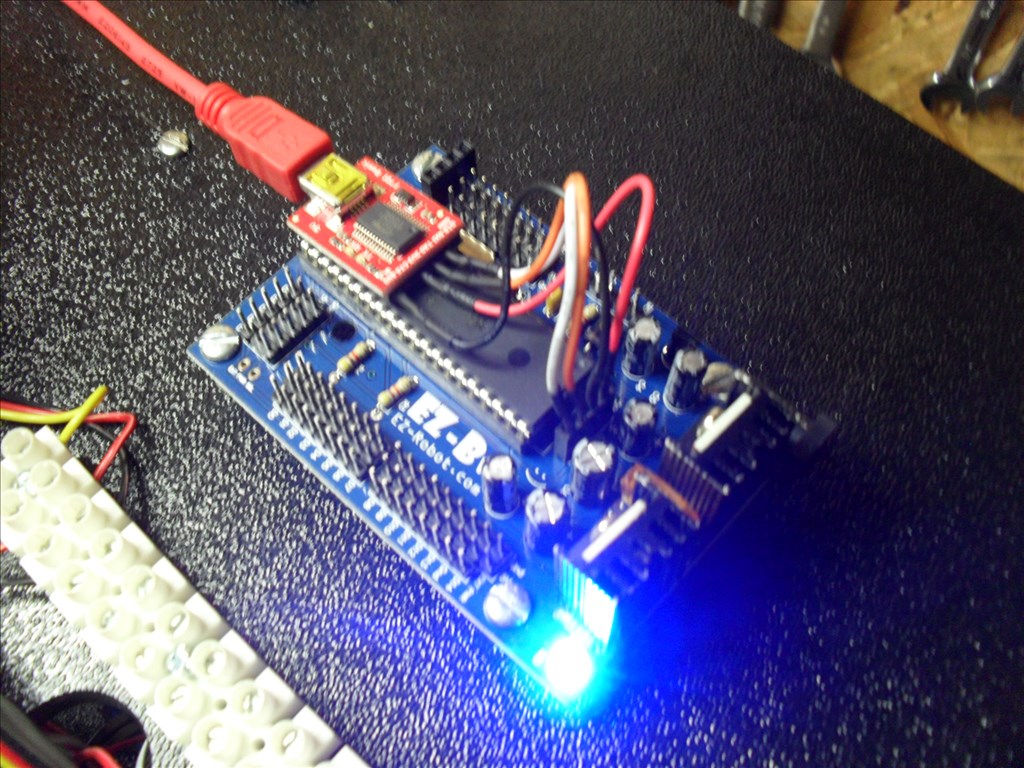
capacitor across the power terminals to help with any voltage sags as other items are powered on. -Bumper switches all around Questor for better collision protection. -More Ping sensors all around to help with collision avoidance and navigation also. -Build and install a 3 channel audio mixer. -Install the Sparkfun FTDI USB to TTL converter and cable to get rid of the Bluetooth connection and connect the motherboard directly to the EZ-B.