

















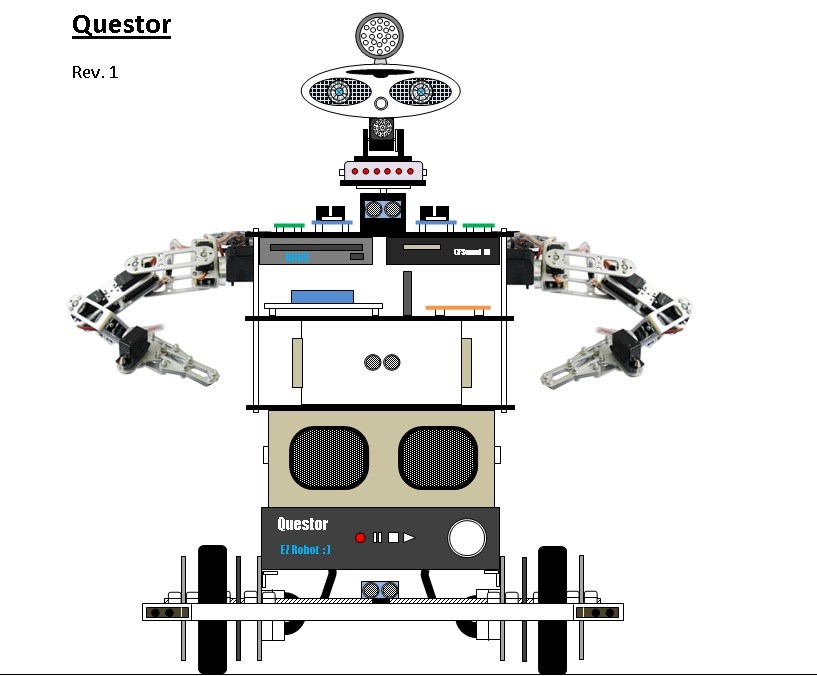
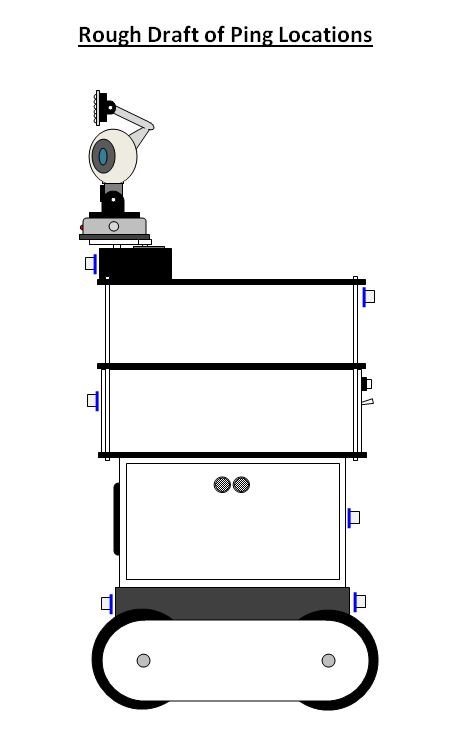
Introducing Questor.
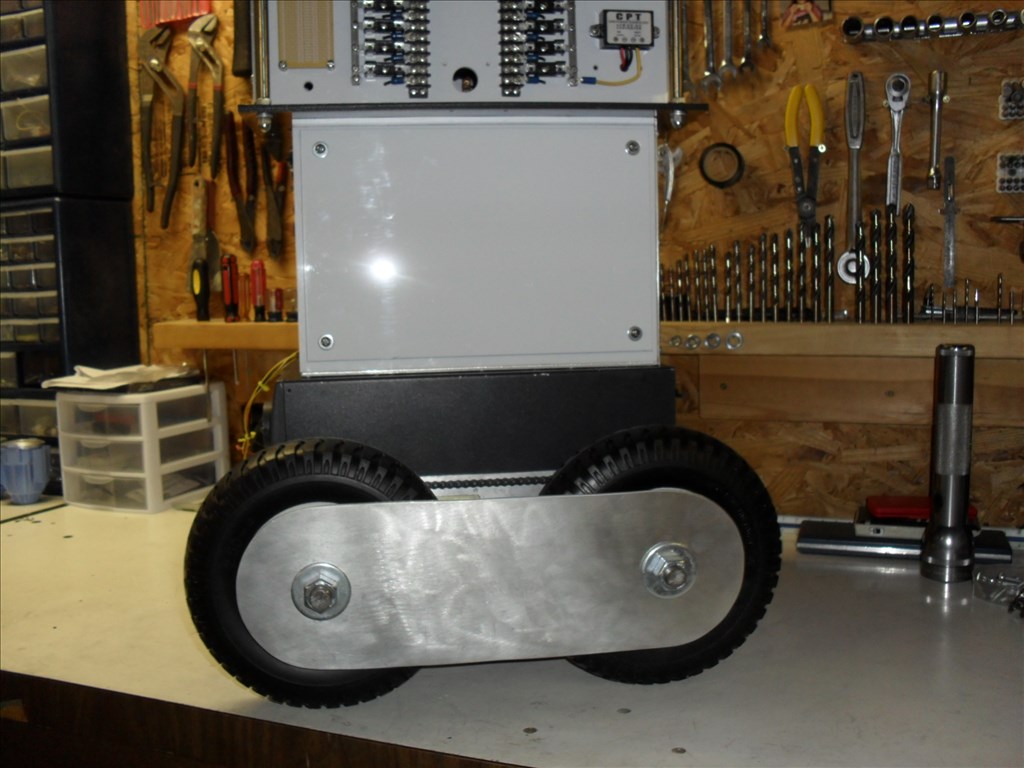
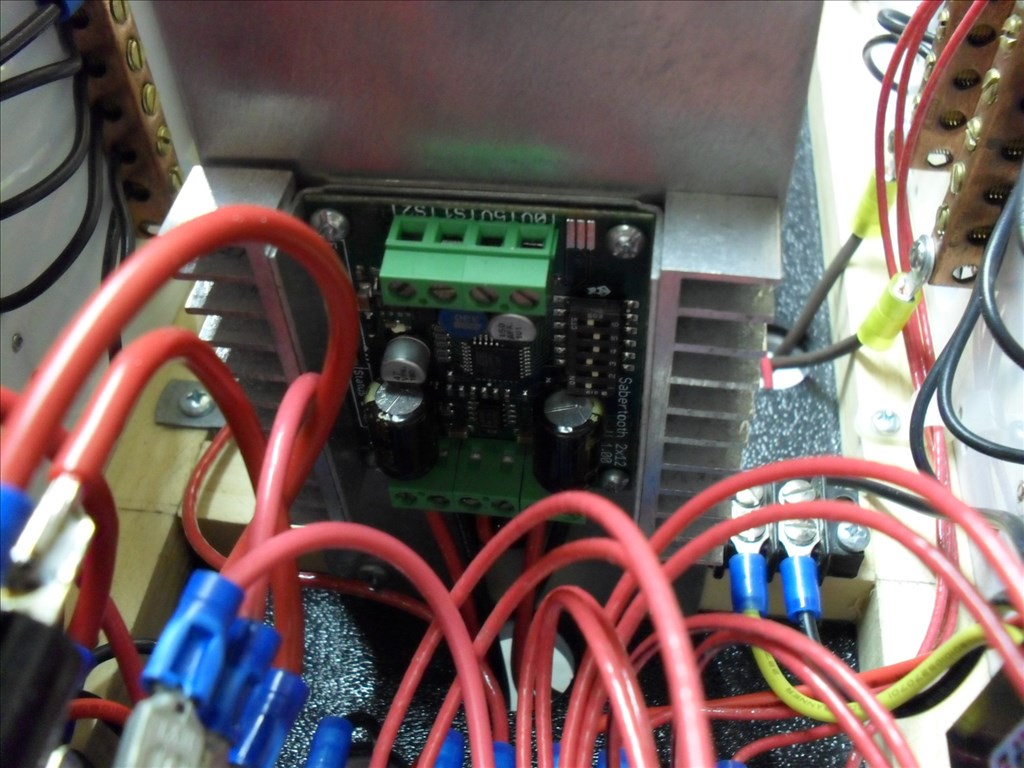
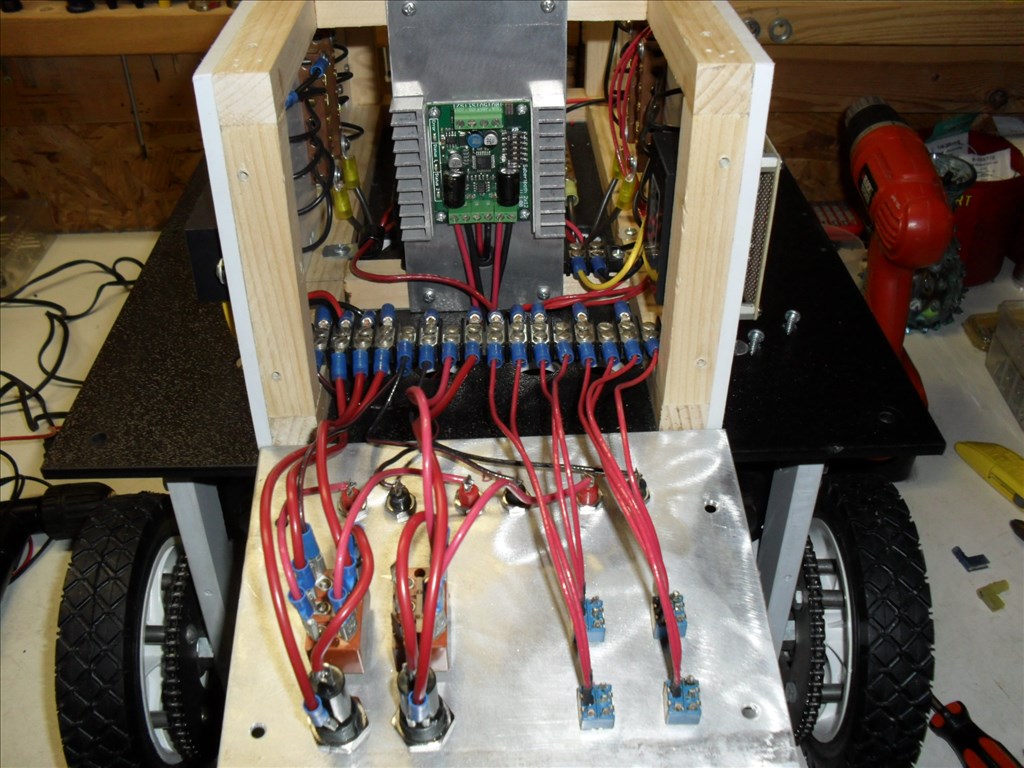
I put a hold on my large robot project Magnus awhile back due to budget and time constraints. I wanted to have a platform that was way smaller, easy to modify for testing purposes and small enough to roam around inside the house autonomously. Questor will serve as a test platform for systems that will eventually be placed in Magnus. Questor was not intended to be a cool looking robot platform, just functional and very basic in appearance. My main goal is for him to be autonomous with the option of me being able to take over remote control separately if needed. I would like for him to be able to automatically find and connect with his battery charger and to eventually have a good A.I.
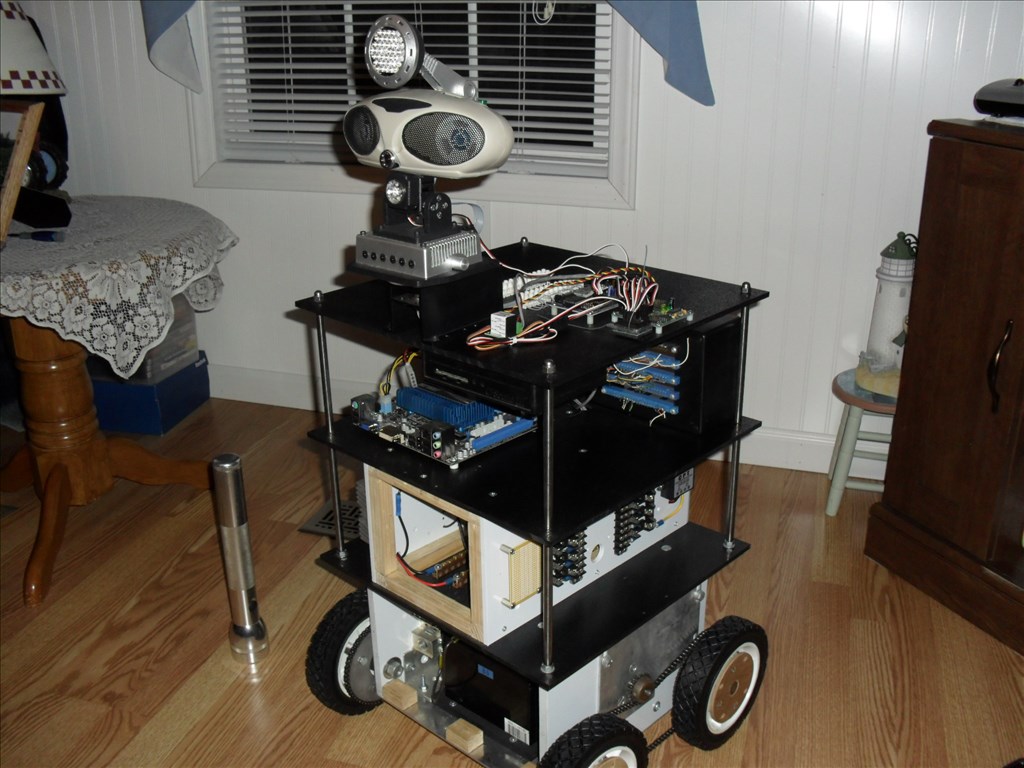
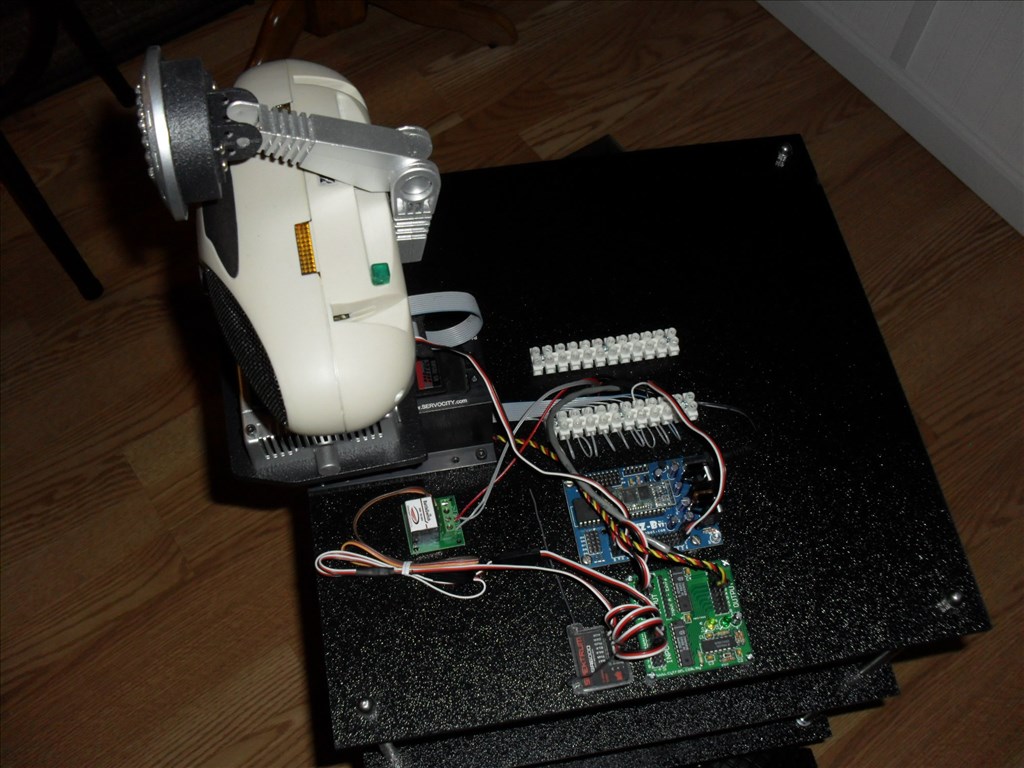
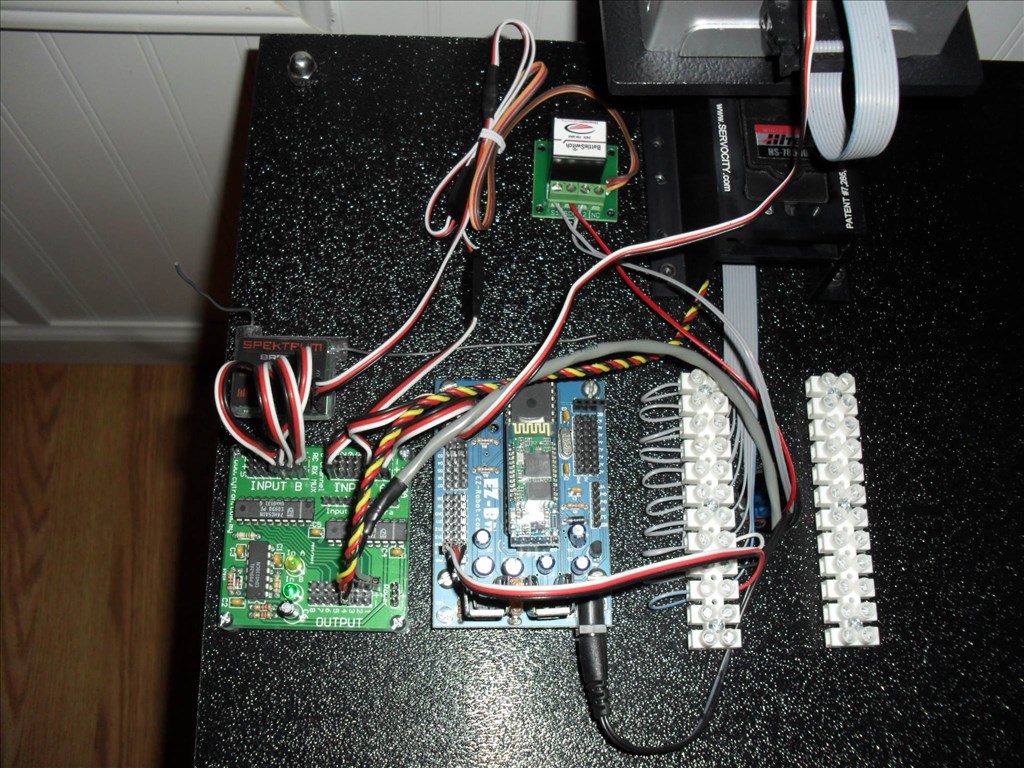
So here is a first look at him...
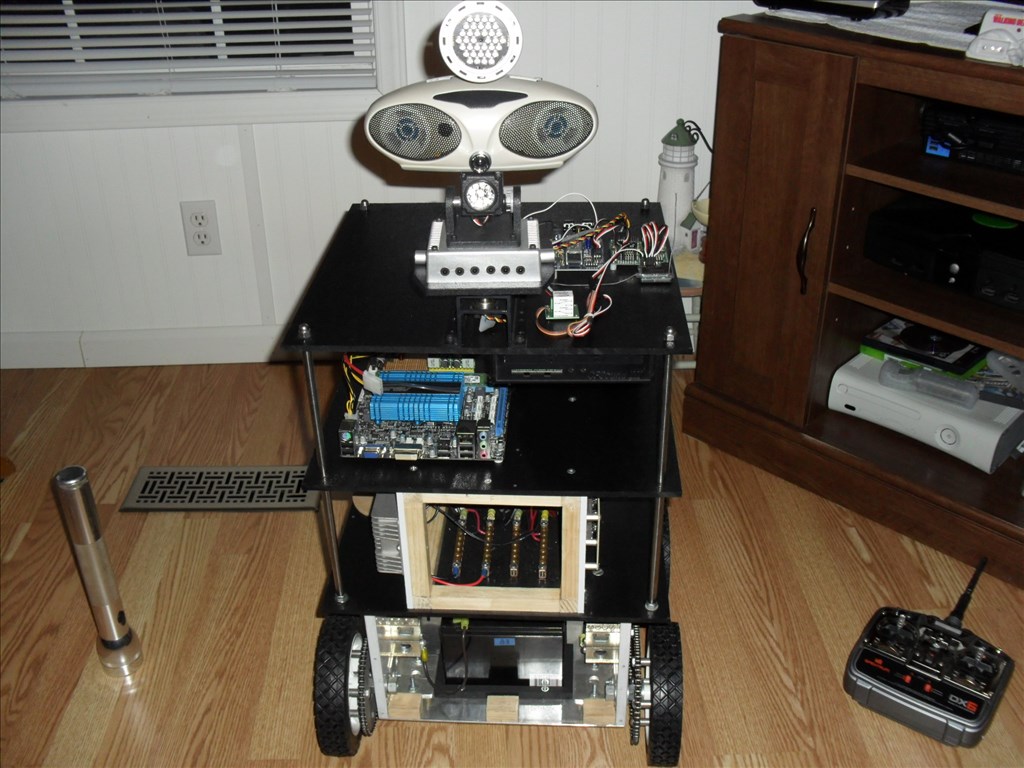

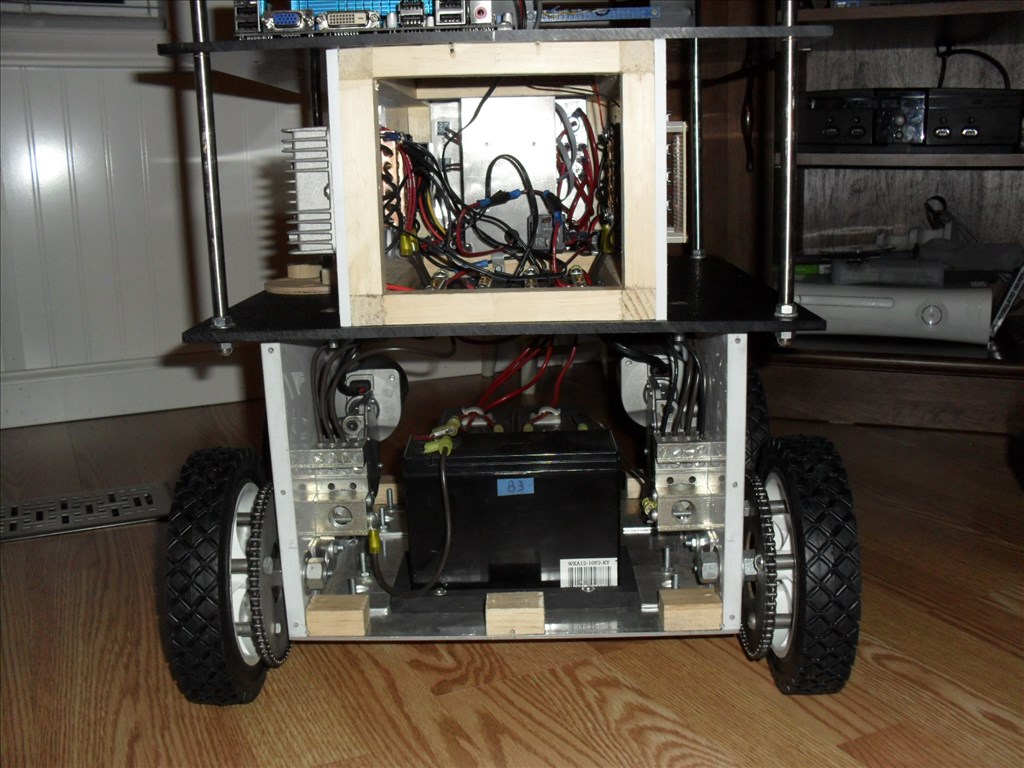





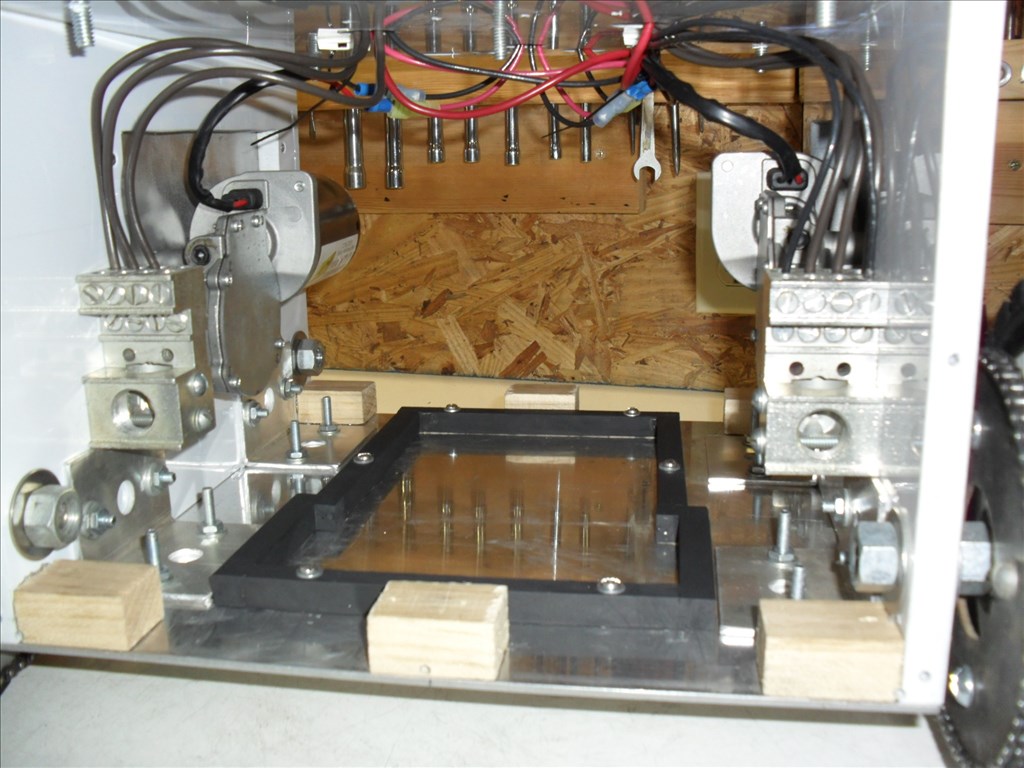




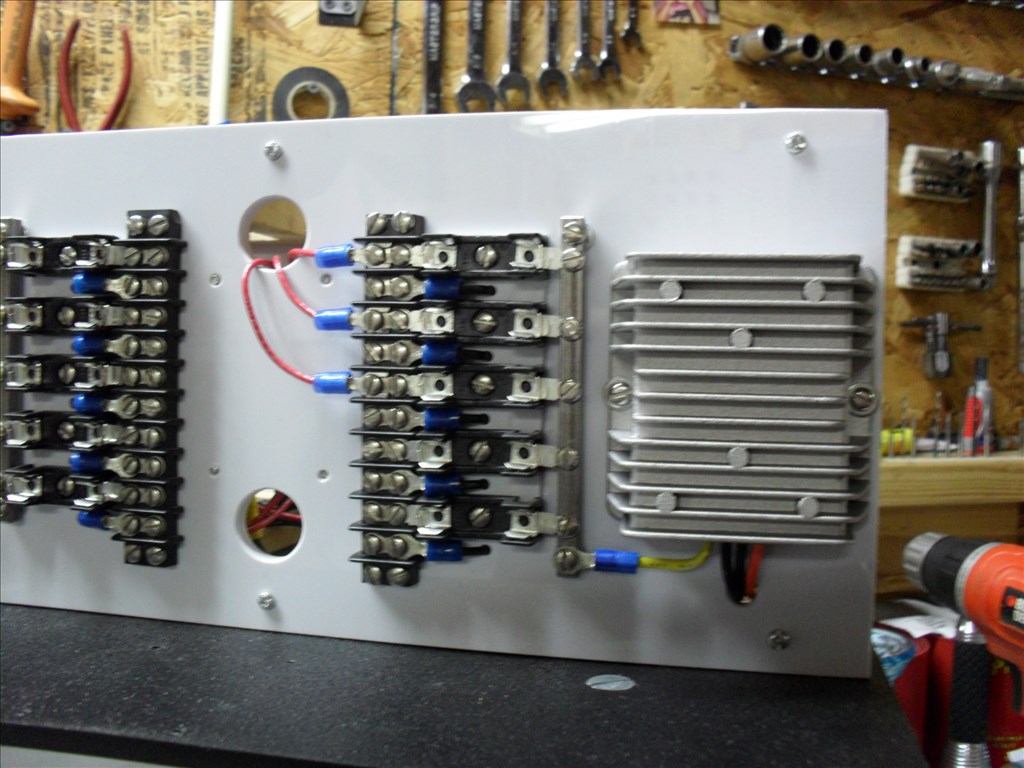


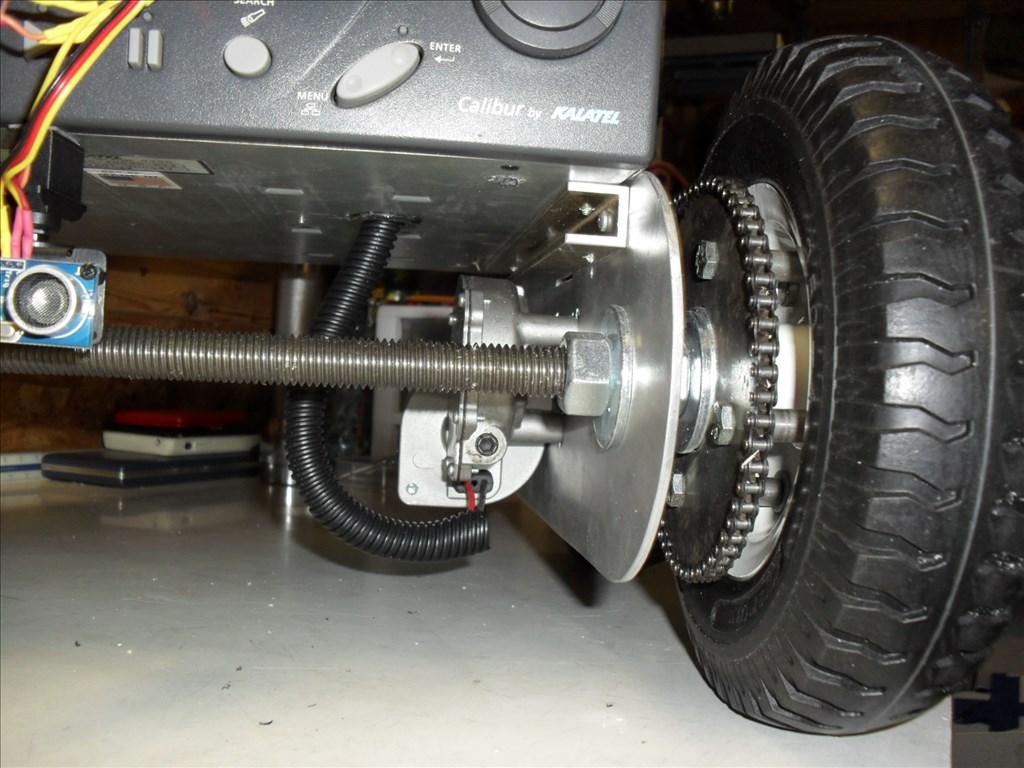
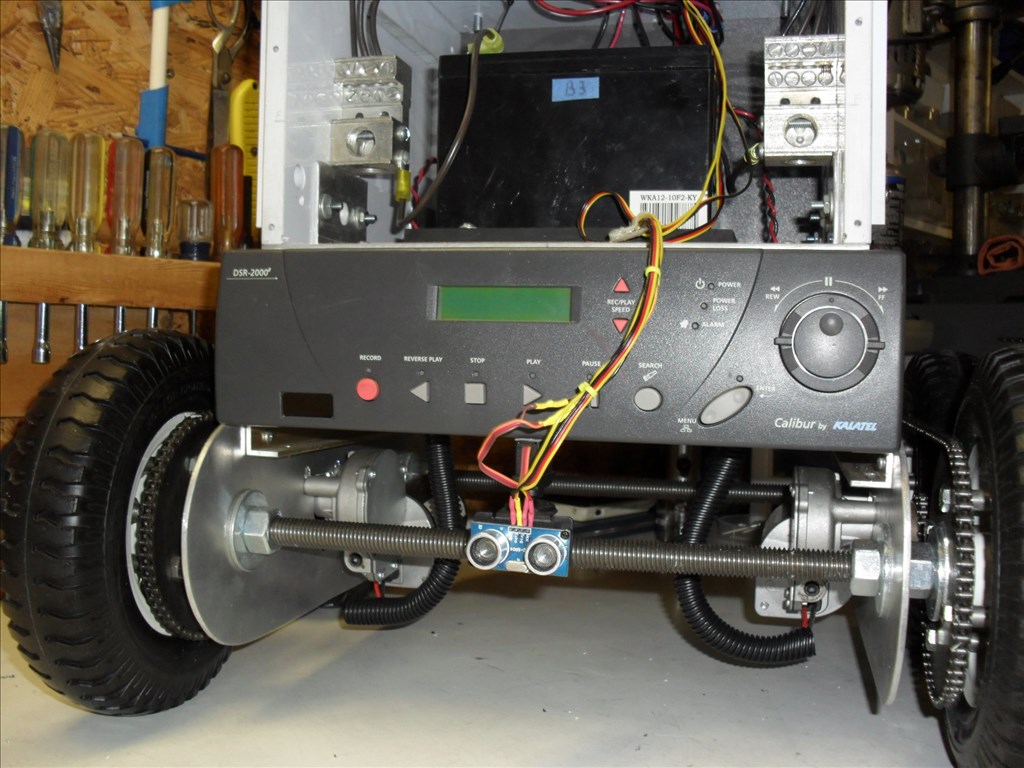
Weird....the pictures below [b]this line were not intended to be here in this first post. When I made the new post below, it saved the pictures in this post also. When I tried to go back and edit them out of this first post they don't show up on the thread so I can delete them. They belong in the post below....see details for the new wheels in the later post.[/b]
Discover more robots

David's Ai Dino Robot

R2D2's Robot Building


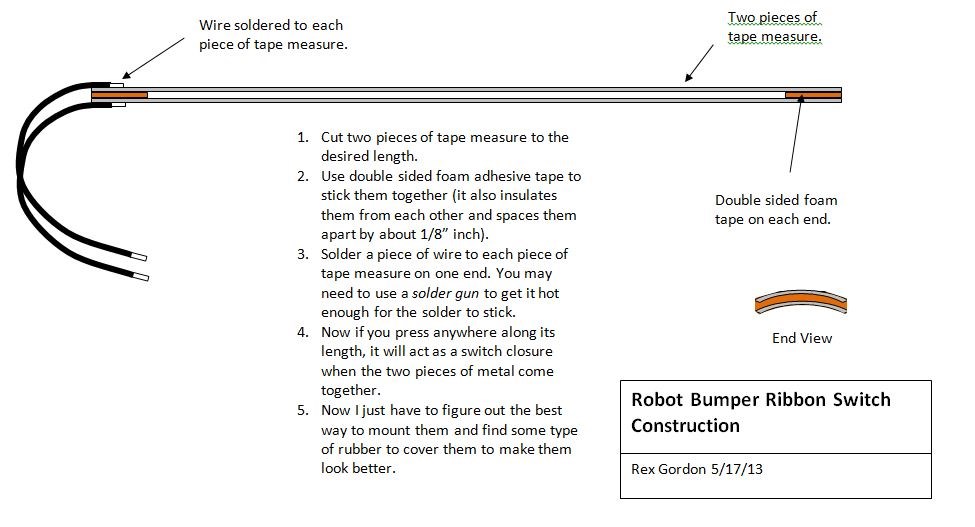
PIEZO disks are great touch sensors,we use that same type at work,i think we get them from farnell.com
BUT like all sensors there are drawbacks ,they are very fragile ,the substrate material inside can break under pressure.
Looking at the circuit toymaker has a link too,i do see it needs a analog input and there is only a few on EZB to make it like a switch is very simple comparator circuit with a high/low output
Using a analog circuit it great for measuring weights,not the best but it works.
@robotmaker
You must be back in the forum as I have show ghost users not ticked yet I am now seeing your posts?
Anyway, I have been using Piezo discs on robots (and designing them into volume manufactured products) for over 20 years and I have never seen a broken disc. On a touch bumper you cover the disc with a material like rubber which absorbs any impact but still passes the resonance pulse to the disc, I have made hundreds of Piezo touch bumpers and never yet seen one fail.
AT work i see a lot break ,but then we use over 1000 per day and in that design you have a link it shouldn't break.
@Toymaker Thanks for the links. I will consider using this method if the switches do not work out.
Thanks to @everyone who is providing input on my build!
@toymaker can you post one of your robots using that design it will help other who want to build it. ON using PIEZO i am using it for a different idea i add planned awhile back for my designs, ONE is a touch sensor with analog output to detect how much touch pressure
PIEZO sensors can be used for a lot of designs ,touch,pressure and speaker,microphone
I GUESS most don't think it will work as a microphone,that the type we design and sell as a piece of test equipment at work,just depends on how you use it and mount it
For Piezo touch bumpers (I personally) do not use analogue but use digital input. I use a single transistor buffer with protection diodes. If there is enough interest here and when I have time, I will post the circuit.
I know the circuit it fairly easy,just a few parts Circuits are very easy,hopping to see how you have it on a robot like other would like too.
@toymaker Can you post a design of your robot using the peizo,very cool to see it
Fred, did you get the $ I sent you? And my shipping address?