Credit for this robot idea goes to @Nink, who suggested it based on my PWM servo Feedback behavior control.
I wrote a quick script that reads the realtime servos of one JD and sets the respective positions of the other JD. Both JD's are connected to the network in client mode.
If you're curious of the code, it looks like this
:loop
# Left Leg
servo(1.d14, GetServoRealtime(0.d14))
servo(1.d13, GetServoRealtime(0.d13))
servo(1.d12, GetServoRealtime(0.d12))
# Right Leg
servo(1.d18, GetServoRealtime(0.d18))
servo(1.d17, GetServoRealtime(0.d17))
servo(1.d16, GetServoRealtime(0.d16))
goto(loop)
Here's the project JD Puppet.EZB
By DJ Sures
Discover more robots

Ezang's Robot Hand / Fingers 1/5/2020
Practice robotic hand built with 3 small servos, auto-position and voice control, with Xbox 360 Kinect integration for...
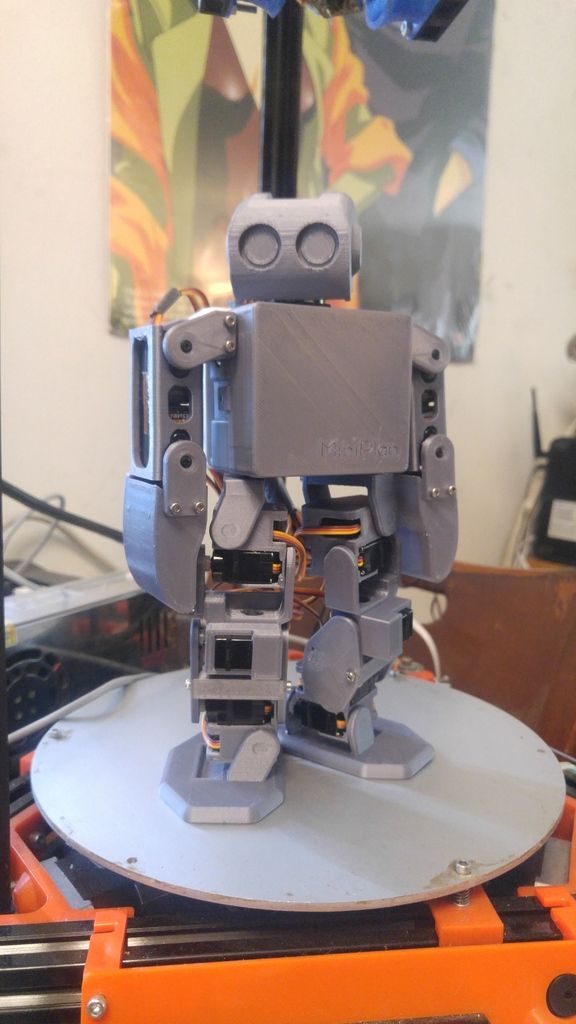
Kenny's Humanoid #3, The Miniplan
3D-printed humanoid built on a FLSun Kossel Mini Delta from Thingiverse, photo build progression and upcoming motion...

Kenny's Motion Activated Camera Pause Toggle
Synthiam ARC toggles camera recording with CameraRecordPauseOn/Off using motion-tracking scripts to auto-start and pause...
