

































































cE9s4PsOgeBQIORwjd5!~~60_1-634818020230156250.jpg)







































































































BO)Lupuc4g~~60_35-634706297915000000.jpg)
LupbT6!~~60_35-634706298769375000.jpg)





C5j!~~60_35-634655044863125000.jpg)
















C5j!~~60_35-634659603510781250.jpg)


































C5j!~~60_35-634651704046230469.jpg)






















































































































































































































































































































































































































































































































































This project has evolved some , the basic rundown is I'm modding two Omnibots , one a regular the other a larger 2000 model. I will have two ezb kits , rad base idea was thrown out because of so much noise but could go back on the table if the omnibot drivetrain is too weak to pull it.





By jstarne1
— Last update
Discover more robots

Jstarne1's Nano Smart Aquarium
Control lighting, current, temperature and salinity with EZB; full build, electronics, wiring and scripts for...
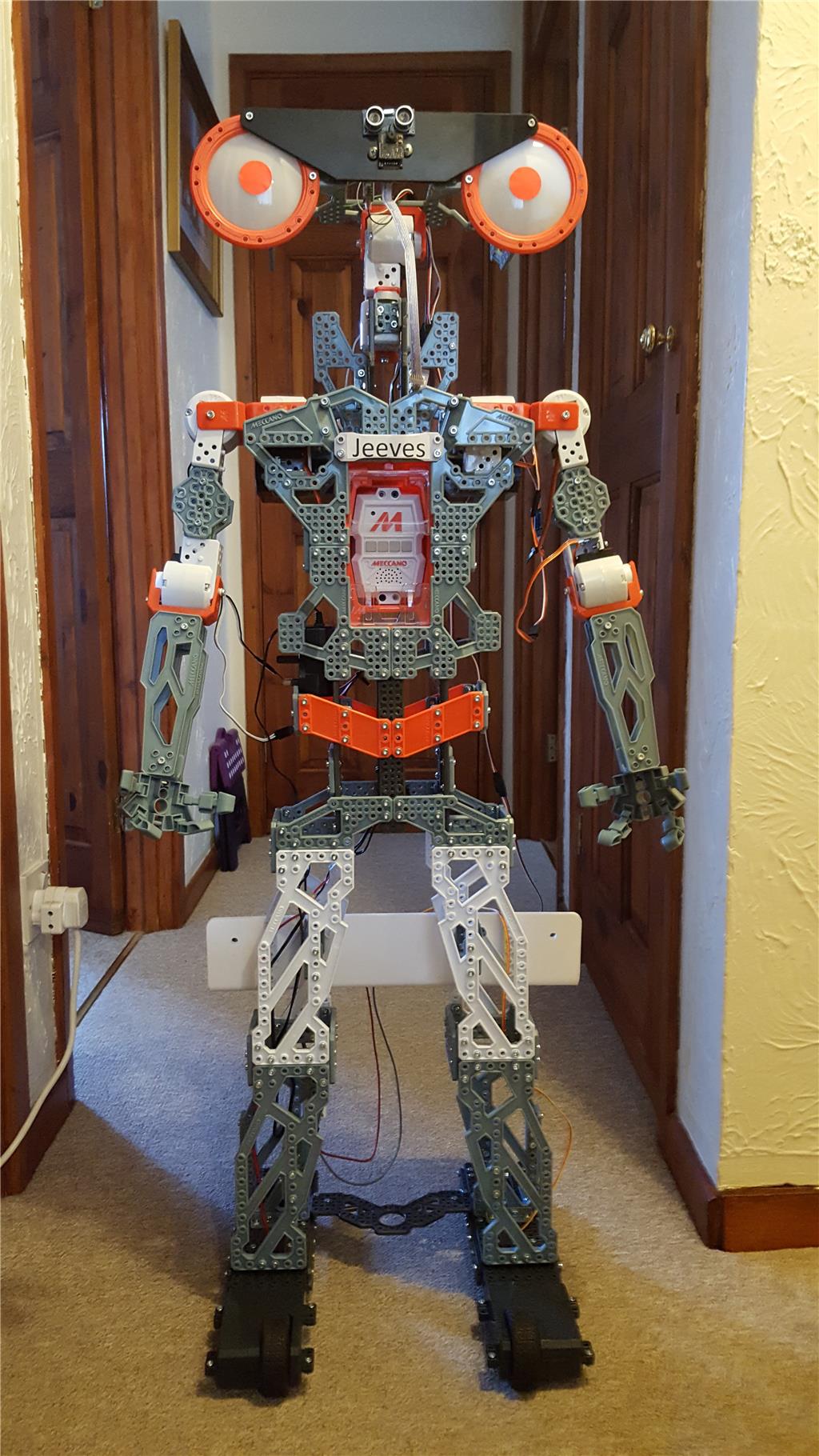
Tezsmith's Giving A Meccano G15 Ks An Ez Makeover
EZ-Robotified G15 KS Jeeves: EZ-B v4 servo control, Sabertooth-powered drive, camera + HC-SR04 obstacle sensing, Emotiv...
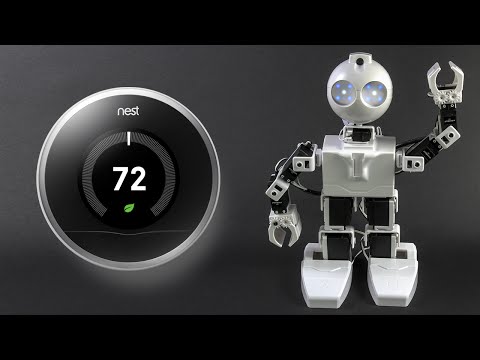
DJ's Jd Connects To Nest Thermostat
Connect your JD robot to a Nest Thermostat to control your home's temperature remotely from anywhere.

I think Drwass answered my question a couple pages back about using the batteries as both 12 and 24 at the same time.. Answer is no, although he was critiquing a more complex circuit than I was thinking of.
Can anyone recommend a good site or book on basic circuit design? Just looking for things like voltage regulation, use of relays, transistors, capacitors, etc... I don't need anything that gets into IC design or higher level stuff. I just need a refresher course on the basics I learned in high school.
Alan
Just testing no it didn't get hot. Are you 24 volt.motors? There are voltage steppers that would work fine for you and I see them on Rabat at 3a and 5a if you needed more current. The 2 amp should be plenty for a netbook though.
Yeah, the motors are 24v, (they can haul 300 lbs, plus their own 60lbs...)
I think you are right about 2amps for the netbook, I'll verify this evening. I have a car converter for it that steps up 12 to 19 volts, vut I know it wastes a lot to do it, so going down to 19 makes more sense to me.
I eventually plan on doing what you did and putting a mini atx in, but the netbook doesn't get much use since I got an Android tablet and a laptop from work not much bigger than the netbook with twice the horsepower.
Alan
@alan so did you.confirm netbook draw , on my tablet charger max is 1.8 amps but.I'm sure its using less than that.
Ok so I'm "thinking" of leaving in the OEM motors for claw and wrist rotation . I came up with a wiring diagram today at work. In.this diagram all powered units are accounted for except my front LCD display but that's 12v anyways. I'm if I can get a servo to move slow enough I will put two high torque servos in place of shoulder motors any thoughts are appreciated.
any thoughts are appreciated.
Anyone know the width and length of the motors in the arms? One arms motors are bad. Or ill just buy a whole motorized arm. And what size thickness and length in mm for the drive motors. I believe I.have found higher torque upgrades but I gotta know the exact size to know if I can fit it in the tranny easily. this is a backup plan in case the OEM motors are having trouble pulling around the extra 20 pounds
this is a backup plan in case the OEM motors are having trouble pulling around the extra 20 pounds
Netbook draws 1.58 amps, so no problem with the DC-DC converters. Nice find.
Alan
Have pics of your bot? Or design?
Ok I have a few updates. first.I caught a great deal to get.three usb 4G data sticks for .99 cents. The idea is.to use.this as a longer range / endless range form of communication I can either use the web portal or direct remote desktop from tablet or phone.
These data.sticks are also usb hard drives since they have a SD card slot for up to 32 Gb memory. The sticks have GPS satillite tracking as well if that could really ever be useful.
Ok I took off modding for a week because I changed to nightshift , however I may actually work.on the bot from my desk lol. I modified the camera housing by cutting a notch into each edge to clear the reflector lenses in the eyes. I used a hole cutting bit to make a perfect hole between the eyes to mount my camera. I drilled a smaller hole below the usb charger so I can do the 5v camera power mod. I used epoxy to adhere the camera casing to the inside and camera pressure fits in just like it originally did.