Ok this is going to be awesome!
So here is my Idea:
1 Sure DC SS503V100 Dual Axis Compass . used for robot orientation and also I will snap shot the angle the ping was pointed when it was shot.

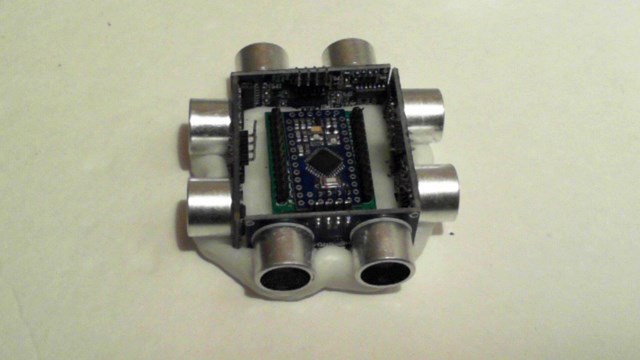
4 Ultrasonic Ping Sensors HC SR04

1 one Arduino Pro Mini

Connect all 5 Sensors to the Arduino then connect the Arduino to the EZB4.
I have done some testing all this will work nice. I'm going to be working on putting them into a single package.
I'll get it all wired up and working and will update this thread in a few days.
By Luis Vazquez
— Last update
Discover more robots

Rickymahk2013's Mark 1 Robot
Develop robots with Synthiam, build the Mark 1 DIY robot, publish a DIY book and showcase projects at international...

Cjmekeel's 3 Axis Skull Halloween Prop
Build and demo a first robot with EZB and Synthiam ARC, showing basic functionality and planned camera-based...
Steve's Using Exec() Commands To Help Make A Game
Synthiam ARC lets K-9 play Rock Paper Scissors via speech recognition and Exec() scripts displaying images; includes...

Firstly, the ultrasonic sensors don't use UART on the ez-b. They can be plugged direct into the ez-b digital ports. That compass sensor could be scripted into ARC too.
I don't see the need for the arduino at all. Connecting an arduino has been done before.
Tech
Techno, I don't think you are following the post/idea.
All of the sensors above will connect to one UART port, freeing up 8 digital ports for the HC SR04 alone.
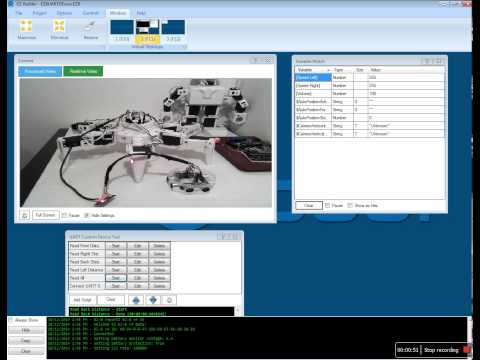
The EZ-B will connect to the Arduino via serial. The EZ-B will send a command which will trigger reading of the sensor(s). The 5 sensors will connect to the Arduino. The Arduino will read the sensors. The Arduino will return the result back to the EZ-B via serial. ARC stores it as a variable. ARC can use that variable for whatever.
It sounds like a great idea to me. It will free up a lot of ports on the EZ-B.
However, where has the Arduino been connected to the EZ-B like this before? I must have missed that topic.
First you still need some type of voltage regulator for many of the sensors. The arduino board can take in 6 to 12 volts and puts out a regulated 5 vots.
Each Sensor uses a ping on the EZB. so your talking about using a min of 2 ports per Ultrasonic sensor and the addition of the Dual compass what would use a uart port. (as i have had little luck using it on I2C)
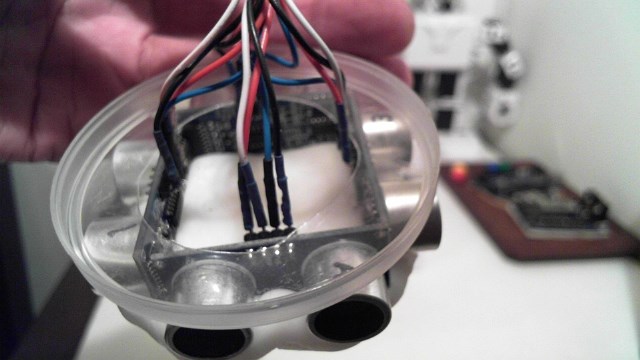
so all in all I will have a little device that is about 4 in x 4 in x 1 inch that does all that and only uses one UART Port on the ezb.
Here is one.
Haha Rich your so fast!
here is the one.
Thanks @d.cochran for your quick research
Awesome!