














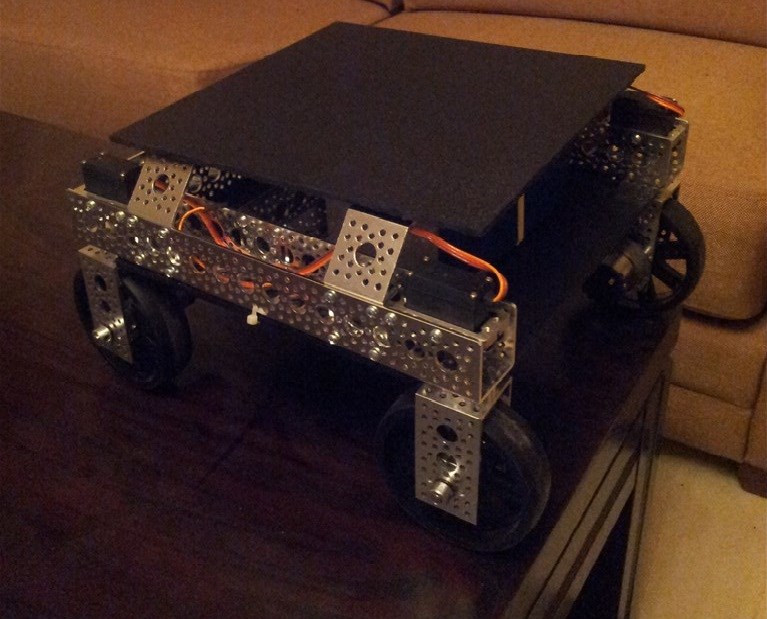






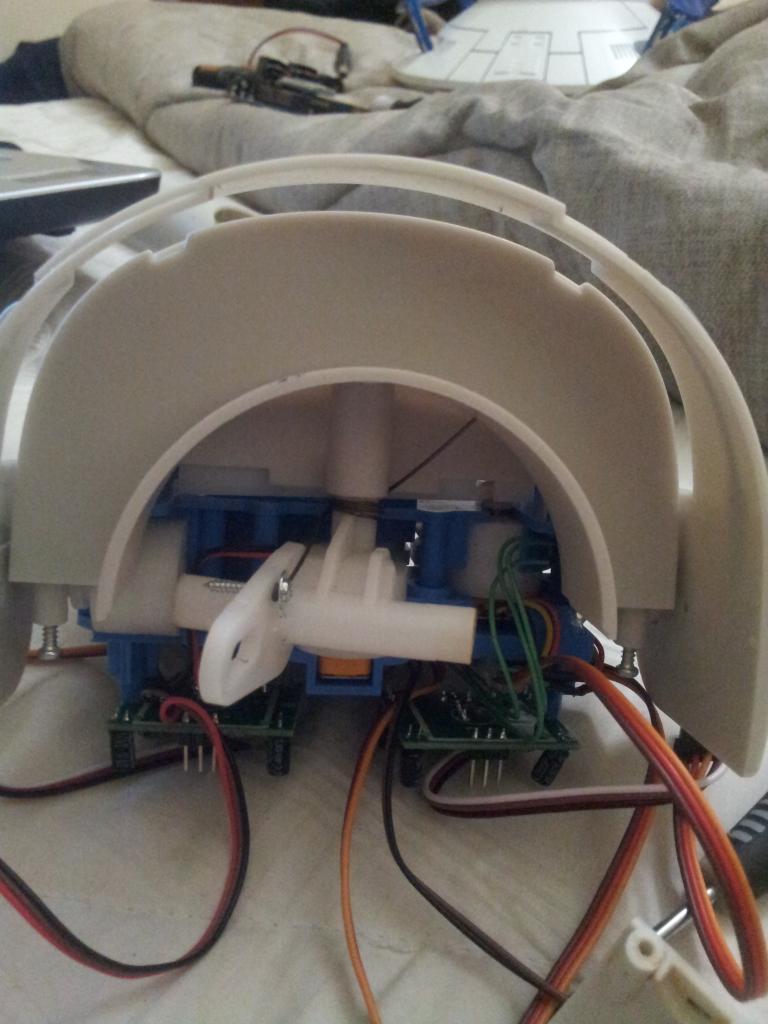





It's just a concept right now but I wanted others to see that the scale doesnt quite match. Right now its just stacked on there and neck is a little too long.
By Troy
— Last update
Discover more robots

Ezang's Roman With New Head Movements And More...
Synthiam ARC controls Arduino robot with eyes, head and mouth synced to speech, using AIML/Bing speech recognition for...

Kashyyyk's R2-Q5 Droid Build With Ez-B4
R2Q5 3Dprinted droid using EZB4: camera in dome, RGB LED magic panel, servos with buck converters, scripts for panels,...

Ezang's Following, Tracking The Blue Line With ARC
Synthiam ARC camera movement tracking for easy object tracking; troubleshooting tip: tail orientation can cause...

It sounds good, I like a video when you got that done...
:)

 j
j
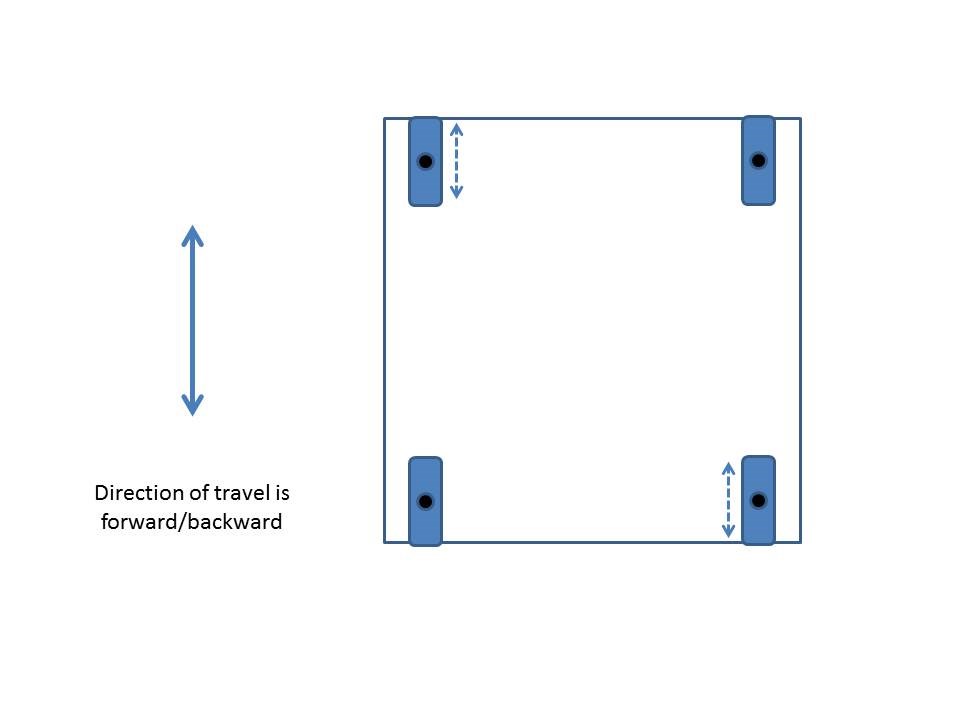
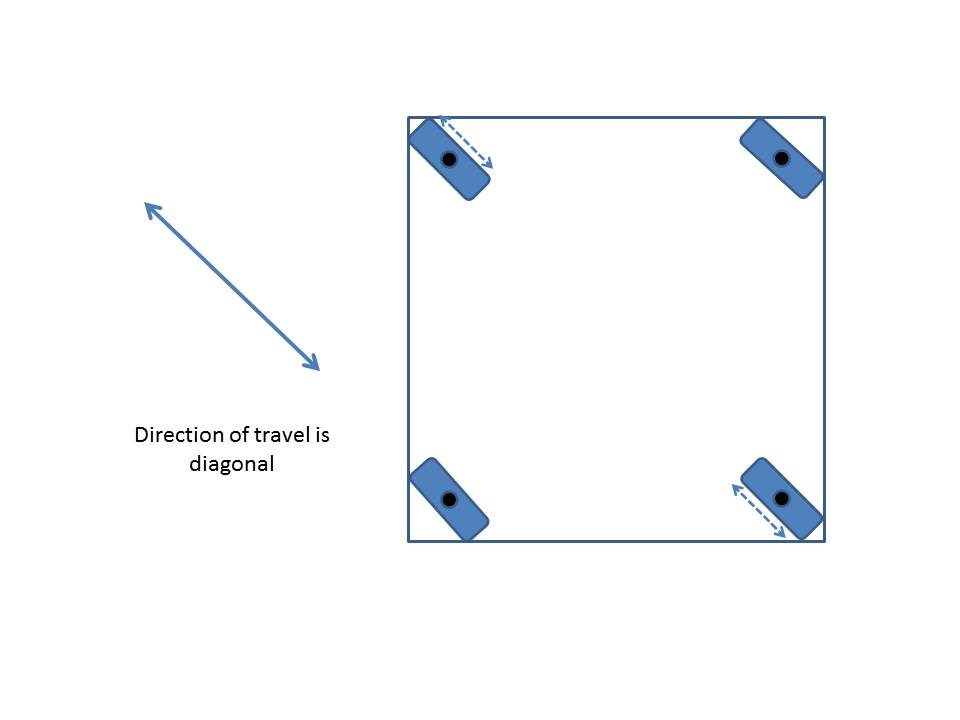
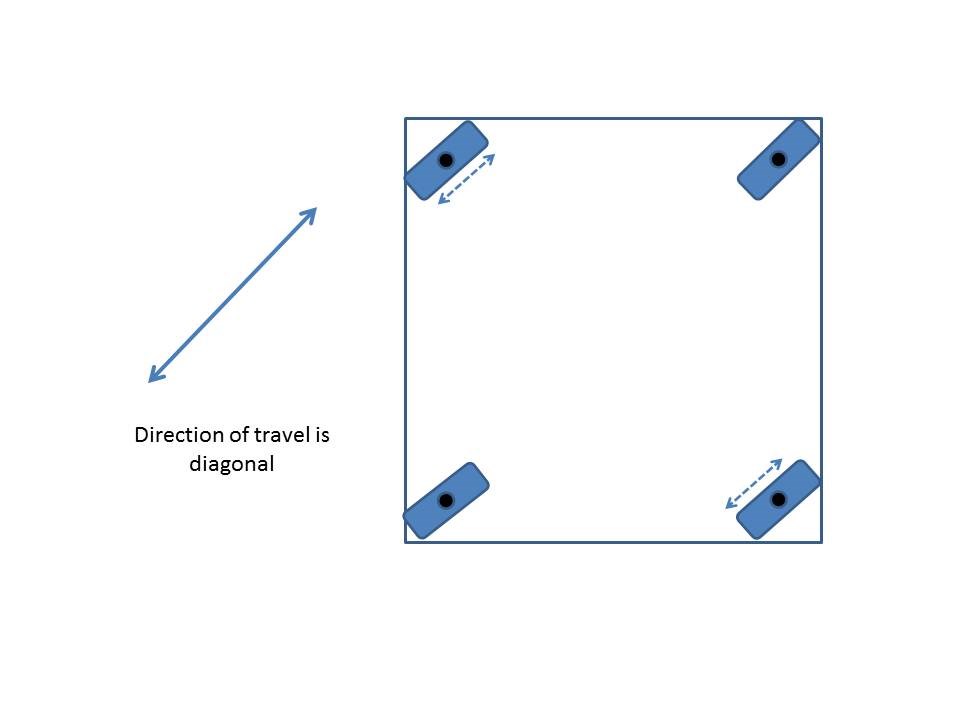
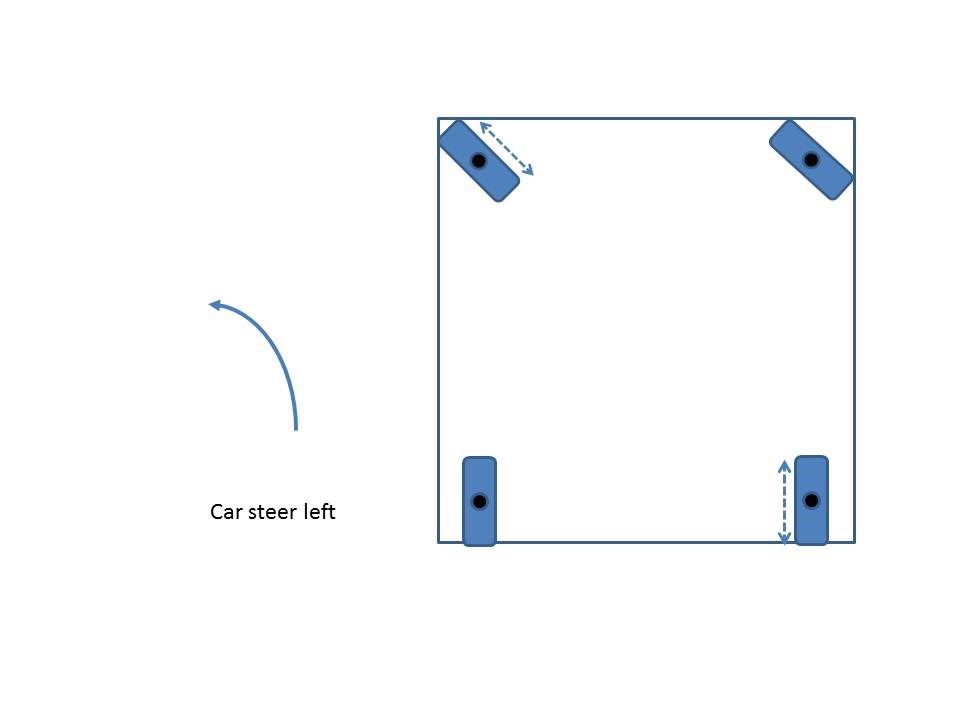
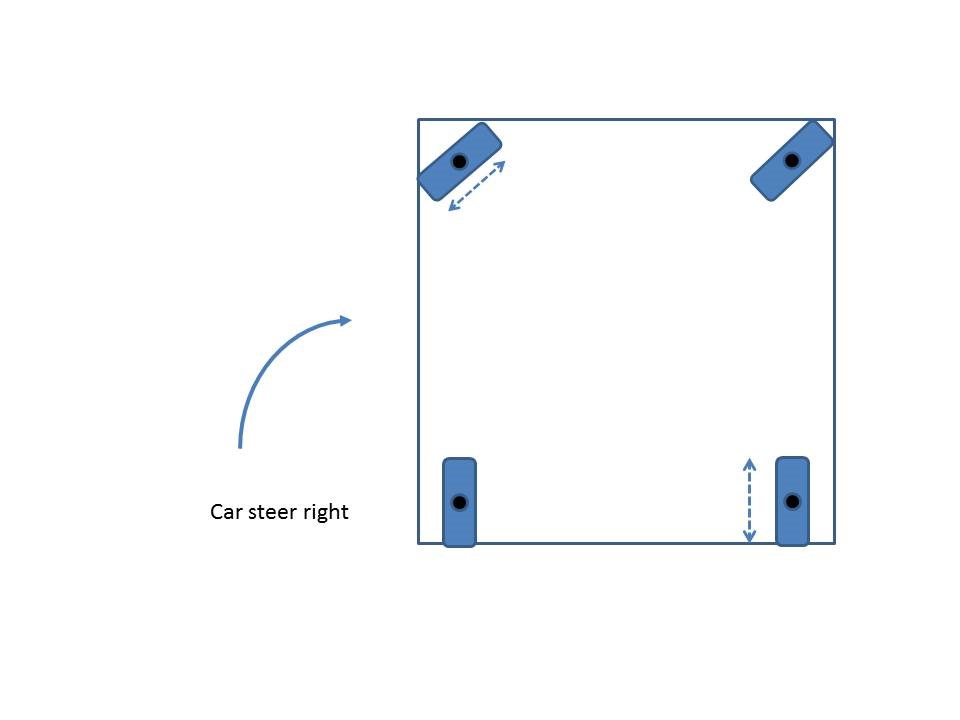
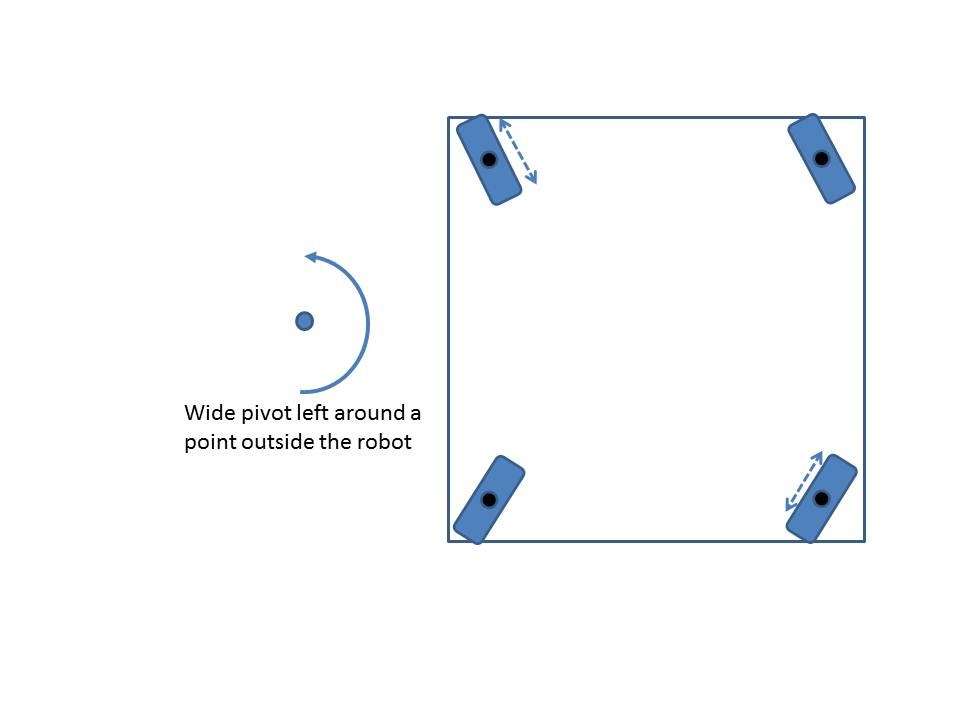
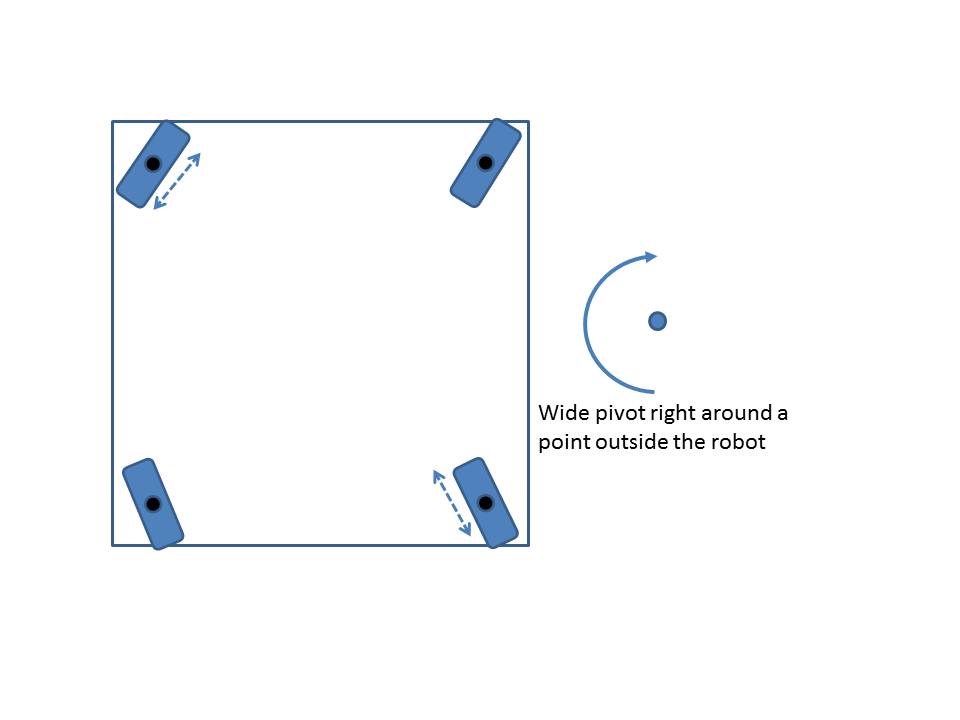
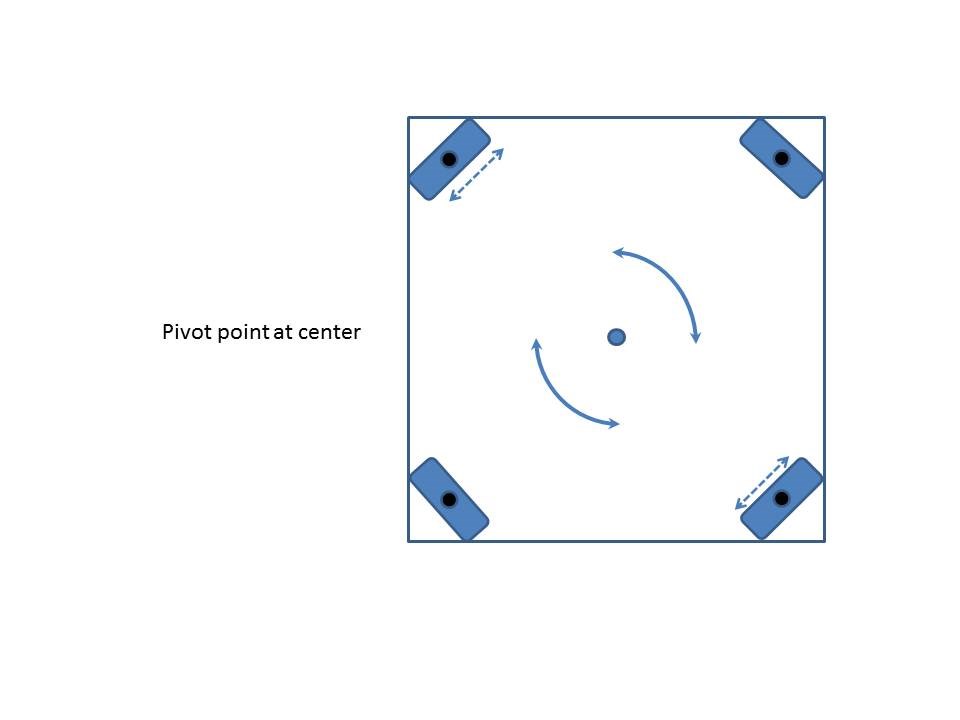
I put a little together before I get to sleep. I just need to see if I have 4 matching Futaba servos. I hope have them on hand. Btw, I do have 2 more gearmotors if I need to add them. I figure 2 is better to make movement scripts simpler. If there are 4 and I try to pivot at any place other than the center then it will mean figuring out the individual speeds each will have to be. I've downloaded a couple of papers on it but its a hassle.
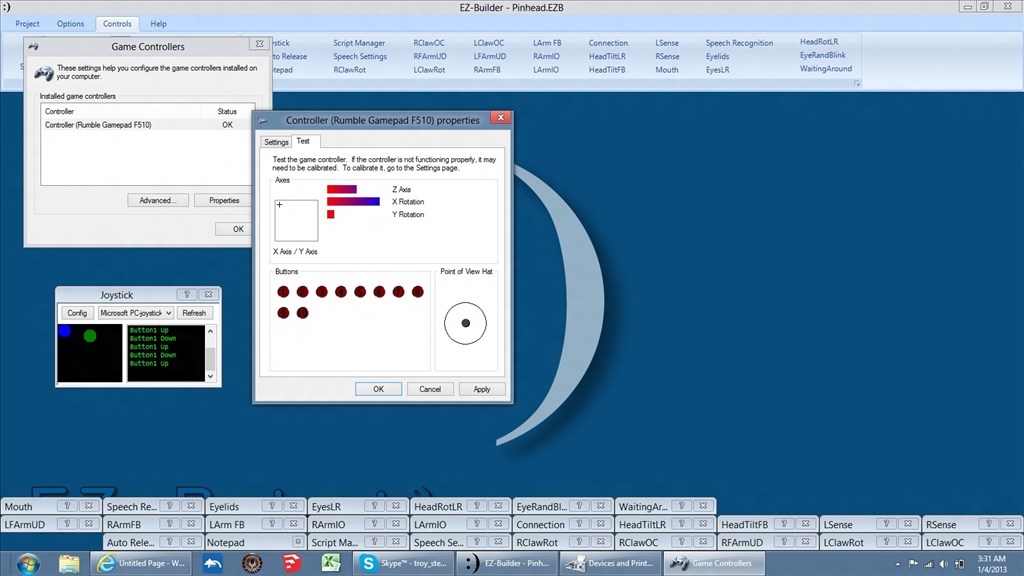
@Troy> That's going to be a neat way to steer a bot. Can' wait to see video of this guy in action.
@rgordon and @jdebay, it will be a while. I had problems with my original board so Im waiting on the new V4. I just hope it turns out as well as it looks in my mind's eye.
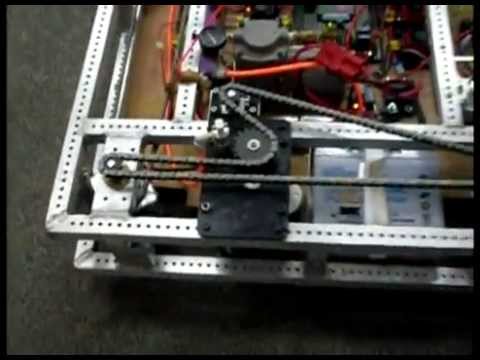
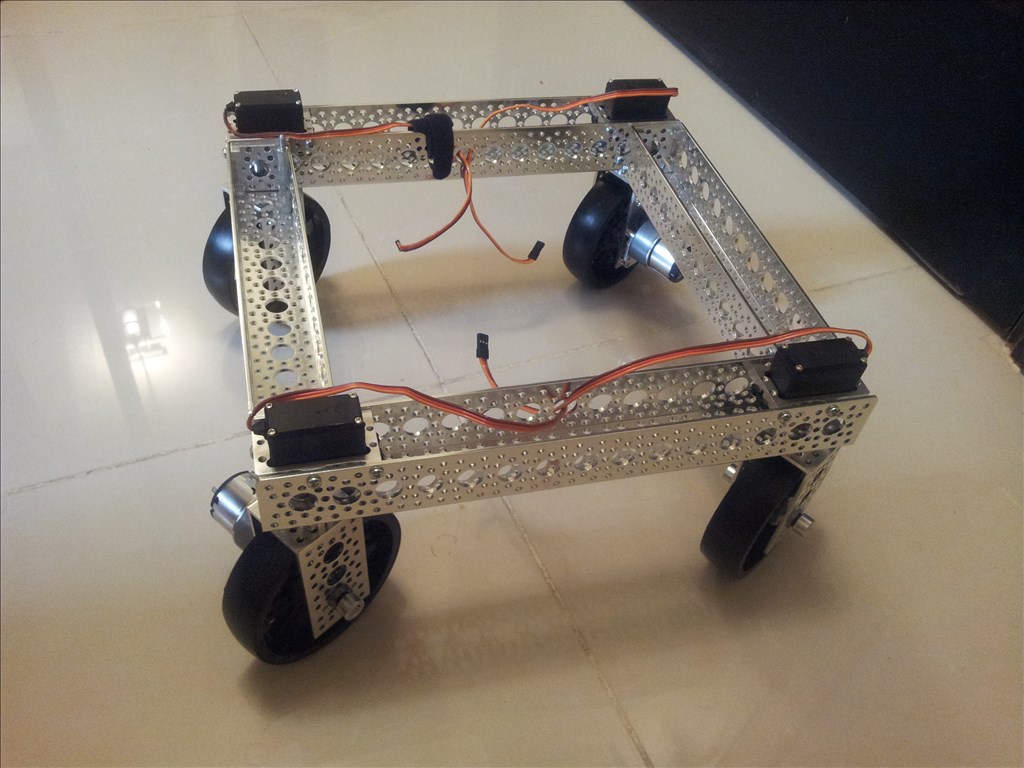
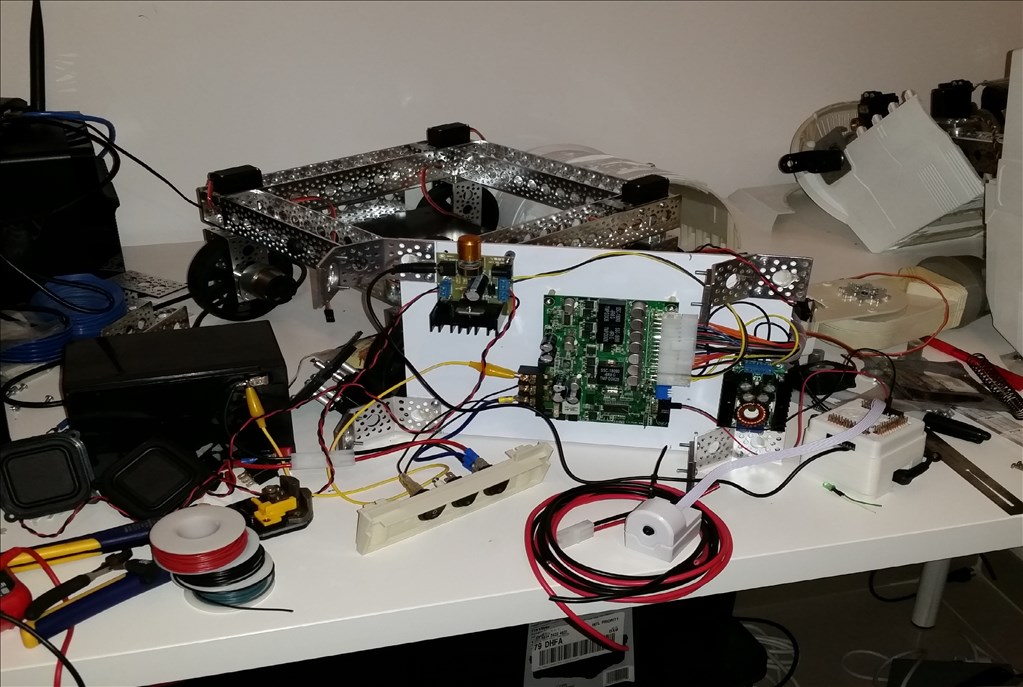
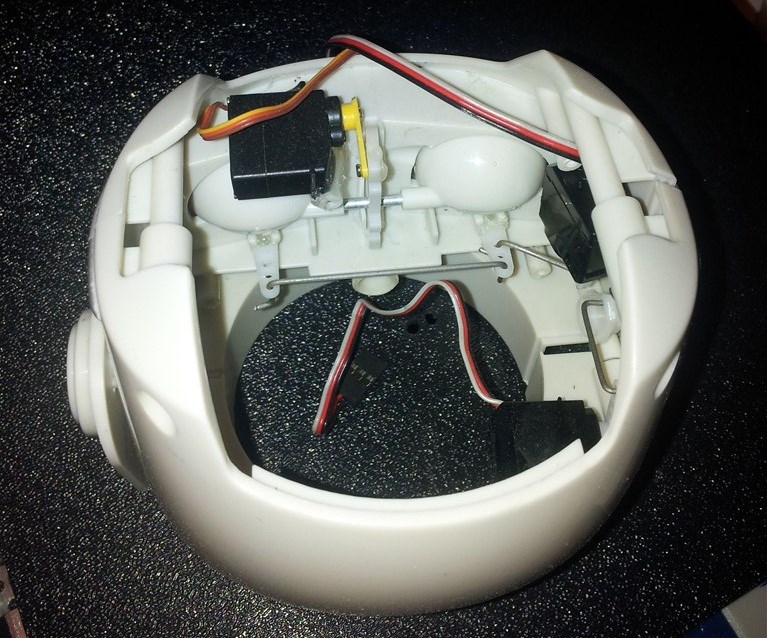
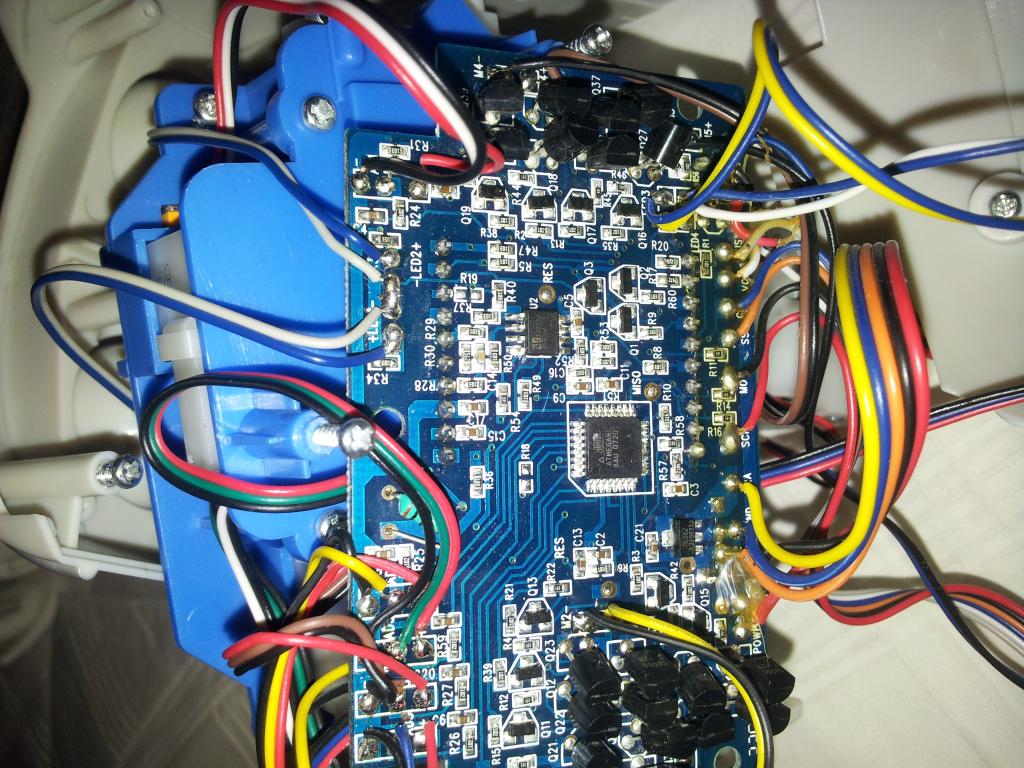
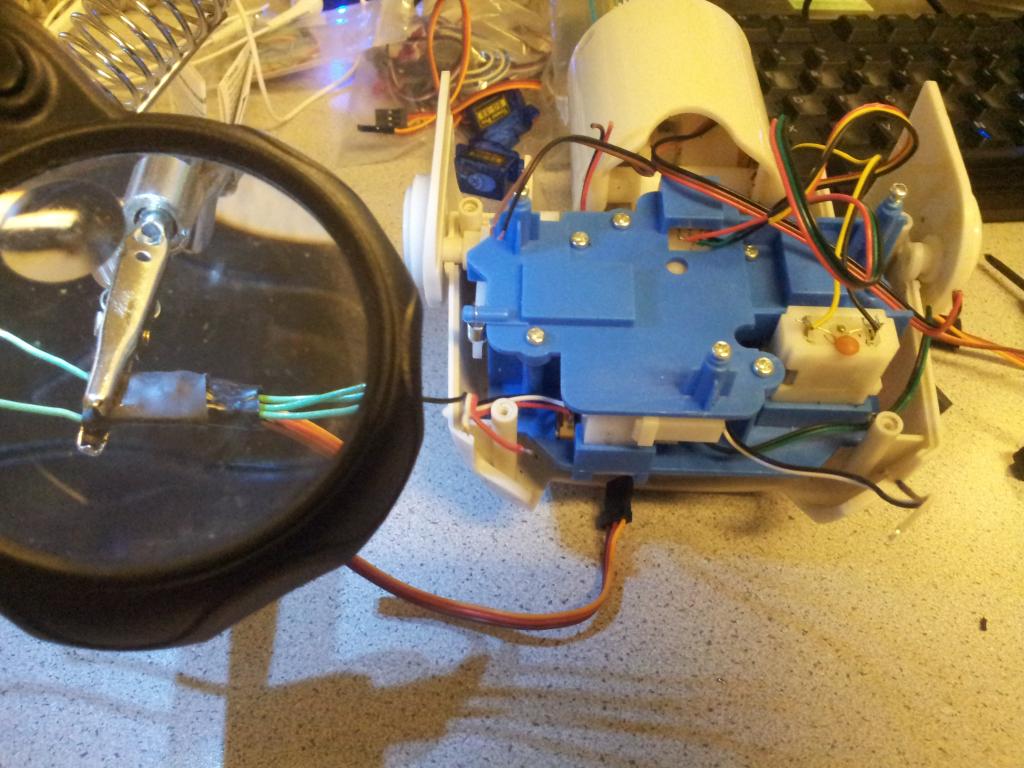
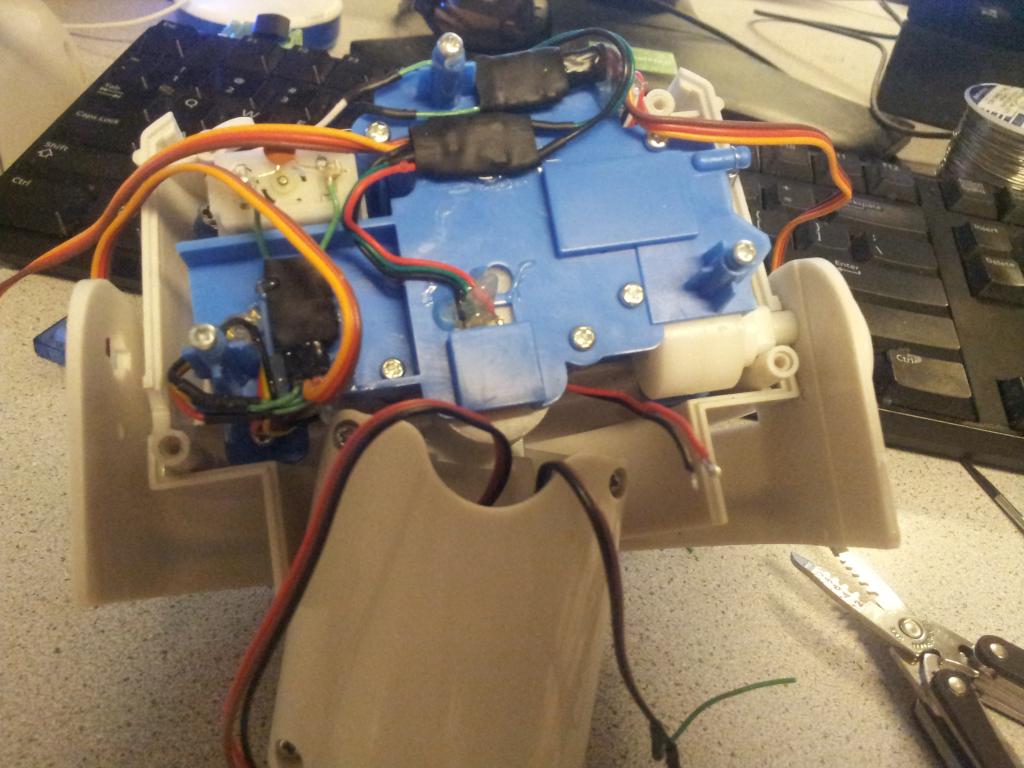
Here is the start of the base. I will update with parts list soon.
All parts except for the servos were from www.servocity.com.
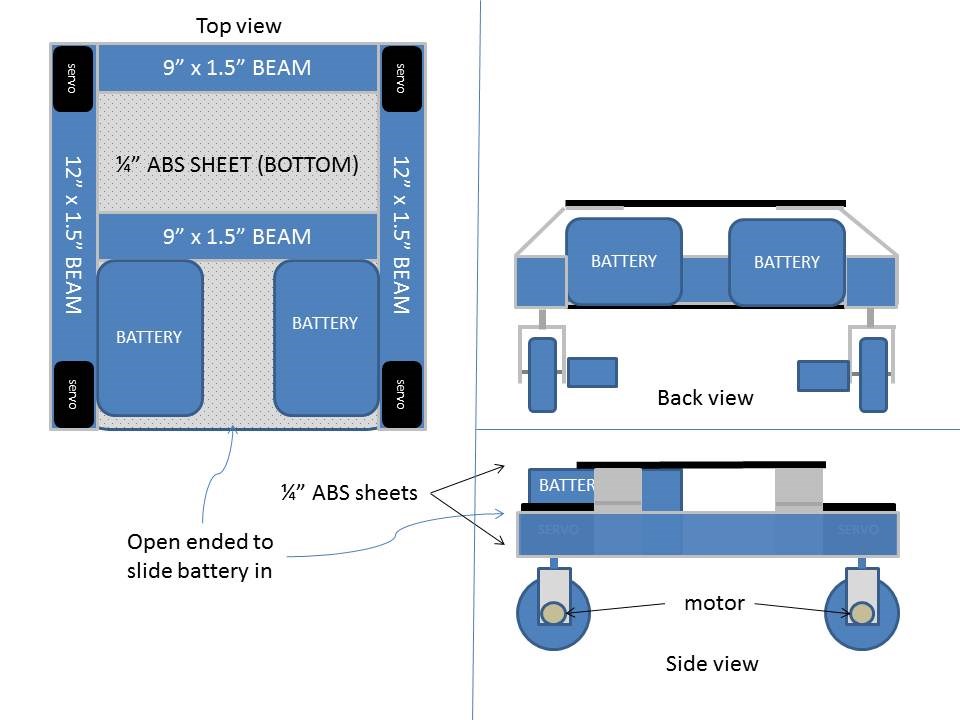
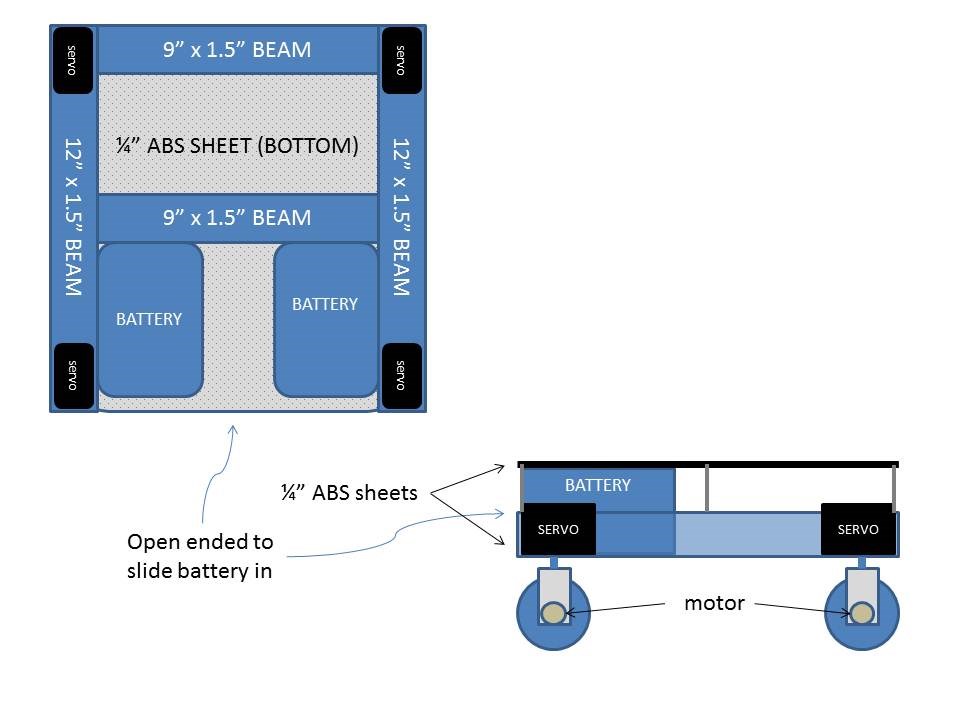
Steerable motorized wheel (2x): (2) Gear motor (one per wheel). If your bot is heavy, buy these 90 rpm gearmotors. (2) Motor mount B (one per wheel) (2) Channel Bracket A (one per wheel) (2) 1/4inch Collar (one per wheel) (1) 1/4 inch Shafting & Tubing Spacers (12 pk) (two per wheel) (2) 1/4 inch x 1.25 inch D-Shaft (one per wheel) (2) 1/4 inch Bore Set Screw Hub (0.770 inch) (2) Heavy Duty 4 inch Wheel (4) 1/4 inch Bore Set Screw Hub (two per wheel) (2) 1/4 inch Bore Clamping Hub (0.770 inch) (2) .250 inch Diameter servo Shaft Arm (Futaba) (for upper steering assy) (2) 1/4 inch Bore, Precision Ball Bearing (Flanged) (for upper steering assy) (2) Futaba servo used for steering (faster the better) (2) Standard-servo plate B
Steerable free spin wheel (2x): (2) Channel Bracket A (one per wheel) (2) Heavy Duty 4 inch Wheel (4) 1/4 inch Bore Set Screw Hub (two per wheel) (2) 1/4 inch x 2.25 inch D-Shaft (one per wheel) (2) 1/4 inch Bore Clamping Hub (0.770 inch) (4) 1/4inch Collar (two per wheel) (2) .250 inch Diameter servo Shaft Arm (Futaba) (for upper steering assy) (2) 1/4 inch Bore, Precision Ball Bearing (Flanged) (for upper steering assy) 2) Futaba servo used for steering (faster the better) (2) Standard-servo plate B
NOTE: Of course if you wanted to go with 4 wheel power then just double the motorized wheel list and dont get any parts from the free spin wheel list
Bad news. The lipo I got a while back looks puffy. I'm afraid to use it or even condition it. I left it charged for a few months. It's at about 12.3v.
Wow , that's the worst Lipo pack swelling I've seen. I wouldn't use it. Lipo are made to swell but that when they get hot from extended use. By the way the frame looks really cool.
Thanks Josh. The strange thing is that it wasn't used! I guess it gives me an excuse to get those SLA batteries you suggested. I just won't be able to ship them if I leave here.
Troy, be careful. I had one of those blow up in my Lab one day. It put a hole in the ceiling like it was shot by a shot gun. I was lucky I wasn't there when it happened inside the Lab. I was in the other room and I heard BOOM! I often stand over the batteries that I am charging. This would have killed me. So, now , I point the business end away from me.
Cool setup.