
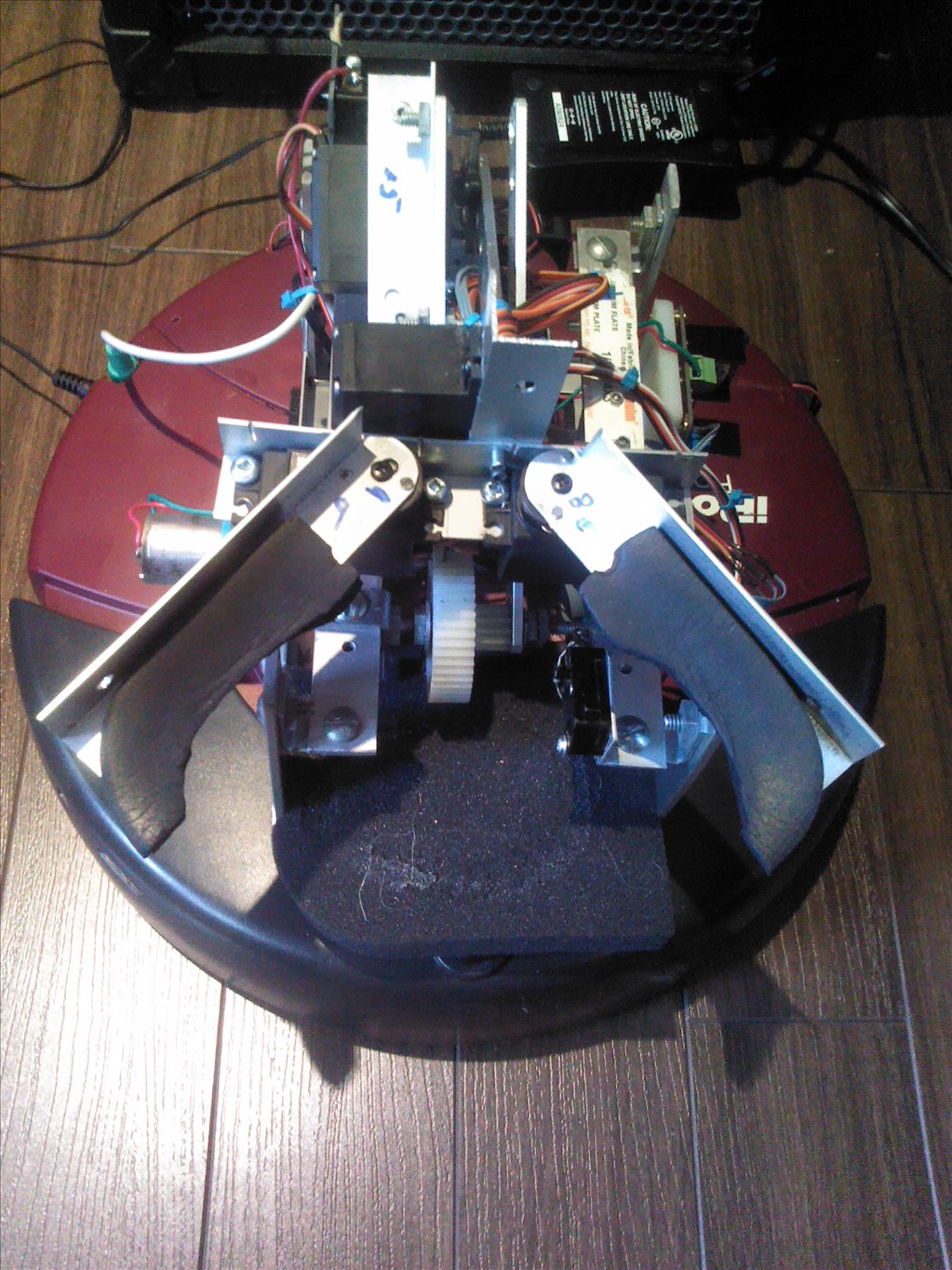
First crack at my beer buddy a few more lines of code for opening the fridge adding some led light strips and good to go. Updated video to come but this is what I have so far.
By RobMcc
— Last update
Discover more robots

Jstarne1's Diy Pc Battery Backup Power Source And 12 Battery...
Build a portable APC battery backup with parallel batteries and 12V charger to power laptops all day using repurposed PC...

Ericez's Dog The Little Robodog Ez-B V.4
Move a DIY 'Dog' robot using servos and a modified Six example program-simple tweaks made it work.

Vertigo's Getting Started On My Inmoov Head
Control an InMoov head with EZ-B and Synthiam ARC: scripted person tracking, pause-and-compensate servo control,...

well done.

Very nice! I was expecting to see "Moosehead" beer ..or Canadian! Thanks for sharing.....Have you thought about modifying the gripper just for beer cans?
Funny you asked that irobot58 because I just finished some rubber grips which do hold my cans a lot better.
Ha! What fun! That little guy would be a huge seller here in Milwaukee, Wisconsin! We consider ourselves to be the beer capitol of the world next to Germany.
Is your little dude RC controlled or script? I can see a problem with beer spilling out of an open beer can and on top of it when he reaches back and up. That could only be a problem if you open one yourself and send it over to your buddy an the other couch while watching the game on TV of if you teach it to open them for you.
Well done!
Thanks, he is script controlled and this video was just a sample to give you an idea how it works. Have tested it on a unopened can and it indeed works when I have the code finished I will add a new video. My idea was to have it voice activated to respond to "grab me a beer" and he moves to the small fridge opens it and retrieves a can and returns to the couch.
Love it man. That was my first goal is to have a robot to bring me a beer has not happened yet and you are for sure going to beat us all to it
has not happened yet and you are for sure going to beat us all to it . Hope to see it open the fridge soon.
. Hope to see it open the fridge soon.
Dude! That is so cool
My only question is... how good are the batteries? Meaning, will they last long enough to bring me a beer?
excellent just love it. does it clean too?
j


