














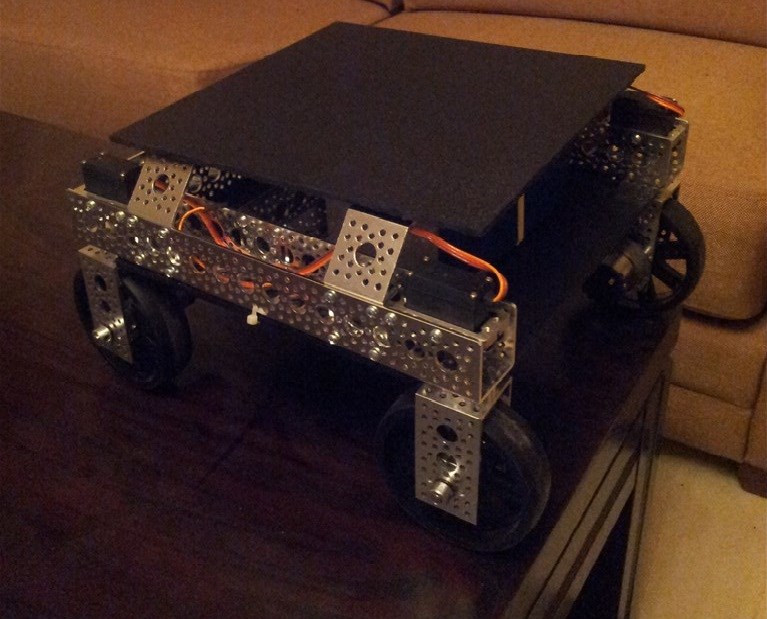











It's just a concept right now but I wanted others to see that the scale doesnt quite match. Right now its just stacked on there and neck is a little too long.
By Troy
— Last update
Discover more robots

Dunning-Kruger's How To Use Roborealm For Indoor Navigation
RoboRealm AVM Navigator enables advanced indoor path navigation with easy setup, extending RoboRealm beyond face and...

Cochranrobotics's Inmoov - D.Cochran Style
InMoov 'Spock' rebuild using LattePanda, dual EZ-B controllers, Omron HVC-P vision, MXL mic, Flexy hands, BEC power...
Ezang's Photoresistor Project With ARC, Arduino, Python...
Photoresistor project using Synthiam ARC, Arduino and Python: red LED lights at high resistance, green LED at low...

@troy start at the bottom... lol Or was that at top.
:)

 j
j
yeh, you can't start in the middle because you will be going two ways at once. heh!heh! You have to start on the top or bottom. go for it! It's gonna be a cool bot.
LOL
Mel
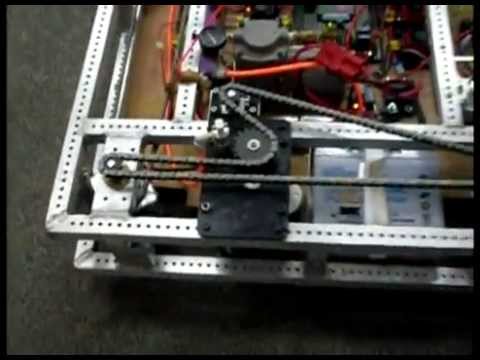
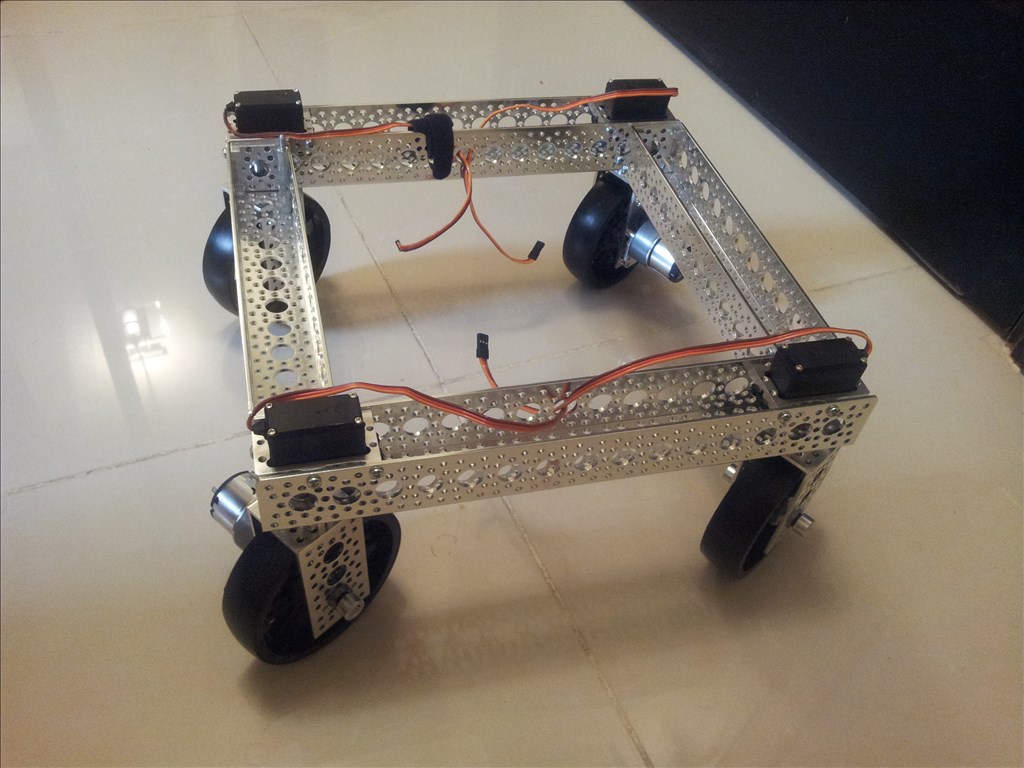
Yeah, I've got a lot of ideas for the middle but it requires a sturdy frame. So I looked at the bottom as you say and realized that I might as well make a crab, swerve or mecanum drive. I was going with mecanum first but the Vex wheels need more parts to adapt them from the servocity gear motor 6mm shaft to the 12mm hex on the mecanum wheel hub. They have these but I didn't want to mess with it just yet. So the plan is:
Updated with more info and links.
you could try the car antenae for a linear servo. If you know what I mean. It was so cool when Mr A. had his camera pop up from behind the counter.
That has got to be one of the coolest robots. I like the way you have all of the stuff we have, but you have eyeballs moving and the mouth moving. It will be great for doing emotional stuff. This is going to turn out GREAT!
Good Luck!
Thanks Mel. I did see his car antenna idea and that was pretty neat. I don't think it will lift a lot of weight though. Besides I've already moved away from lift to another option and it would prevent me from doing both.
It's good to see you back at this bot Troy.
@bret.talent, I know! Eventually I will make progress. blush
@aameralis, only 6oz? I would have thought it would be more. The thought about using it did cross my mind but I reasoned that it wouldn't have enough to lift the entire top portion. It is pretty cool though for your application with the camera.
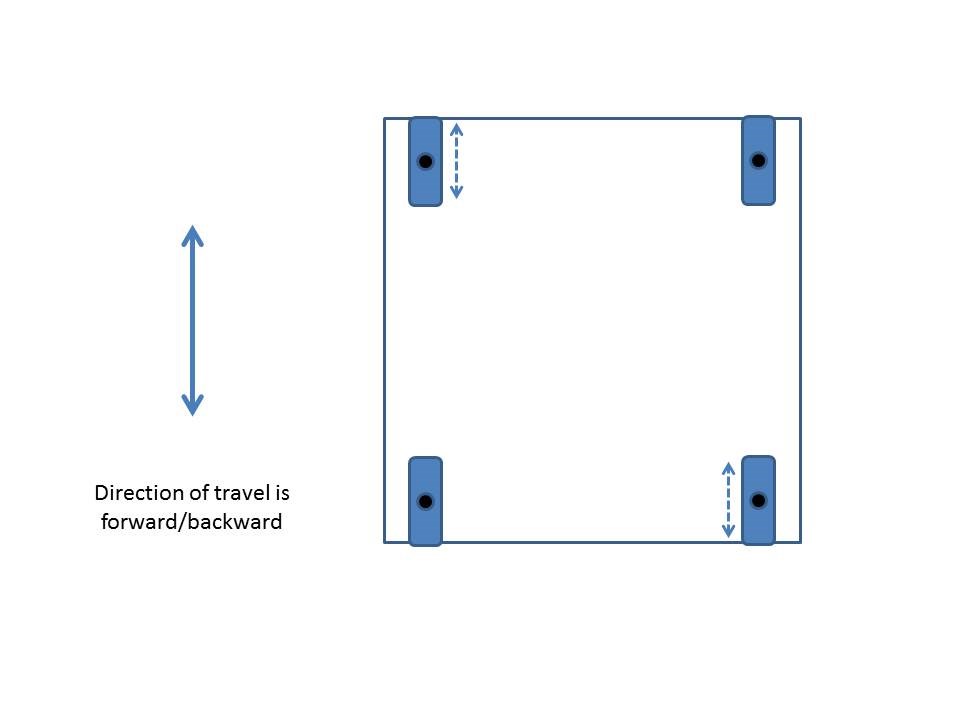
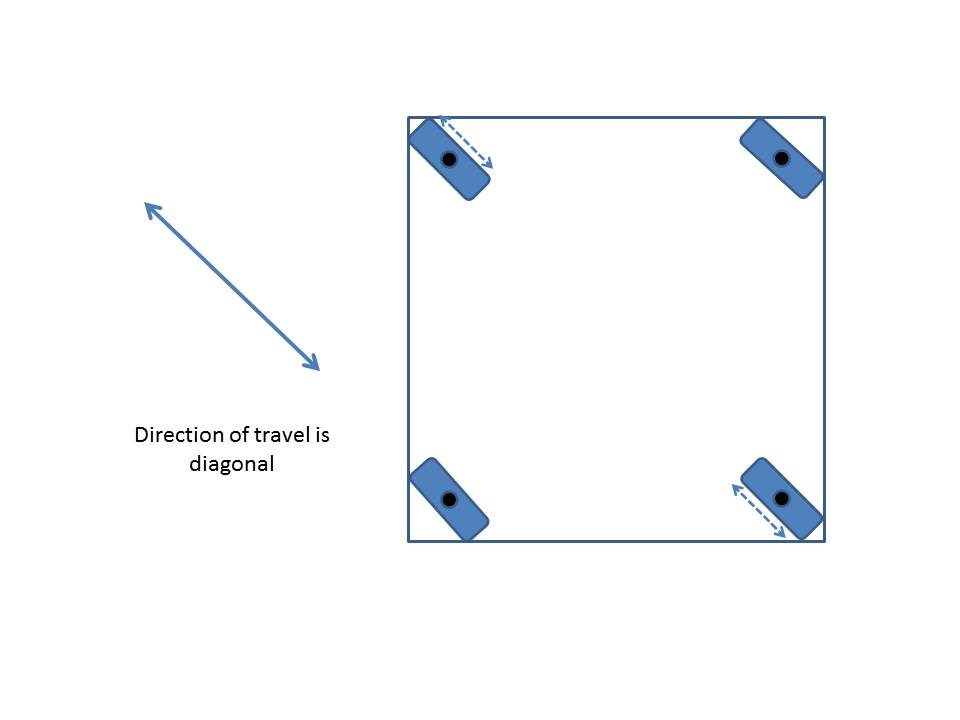
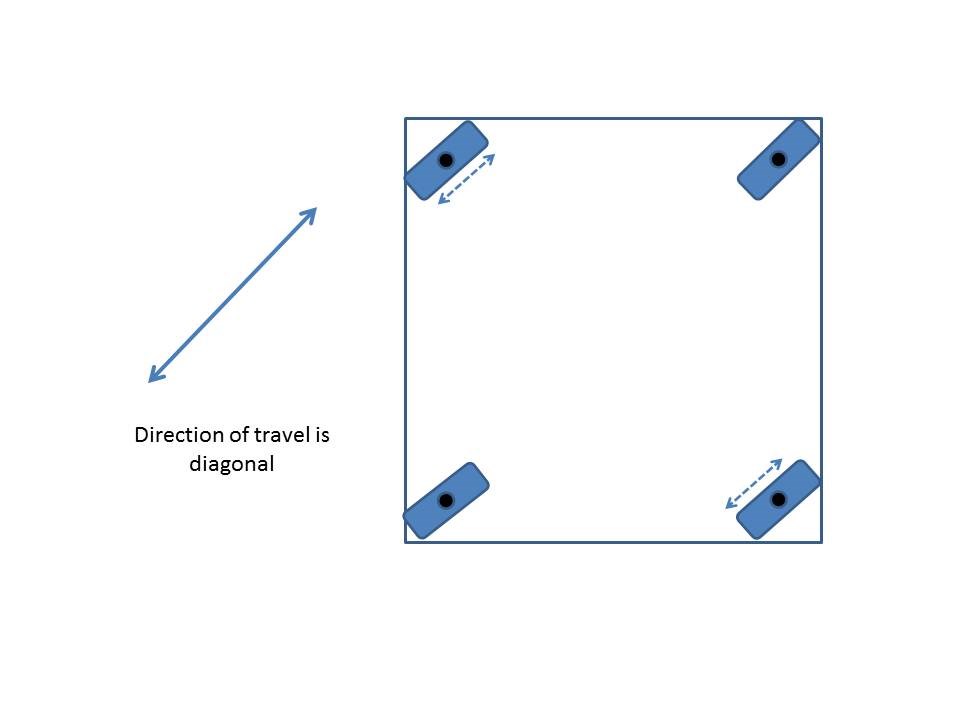
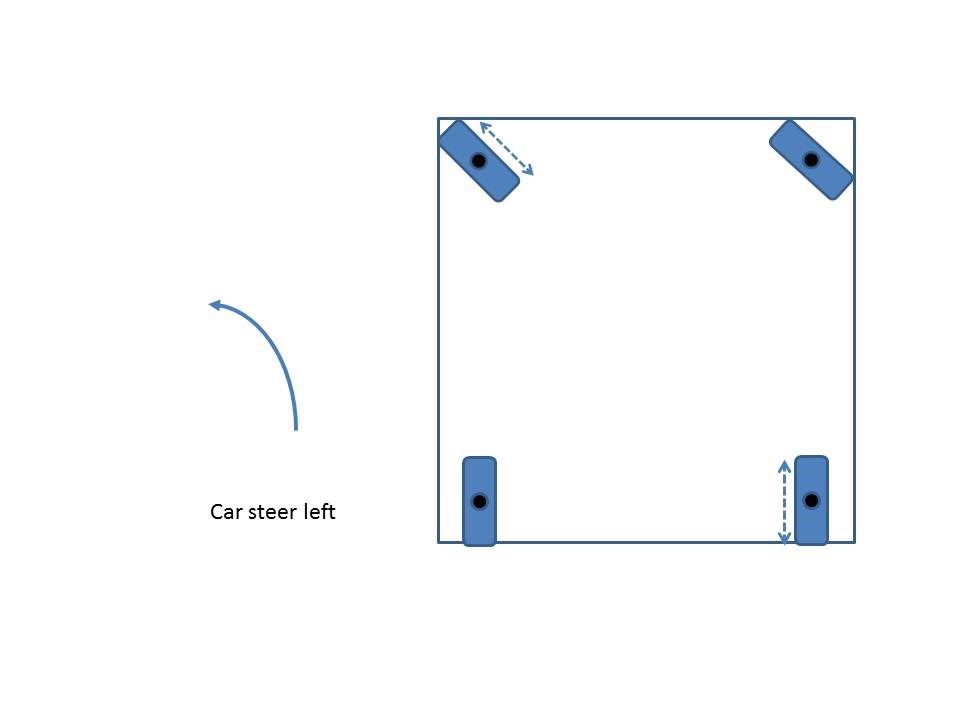
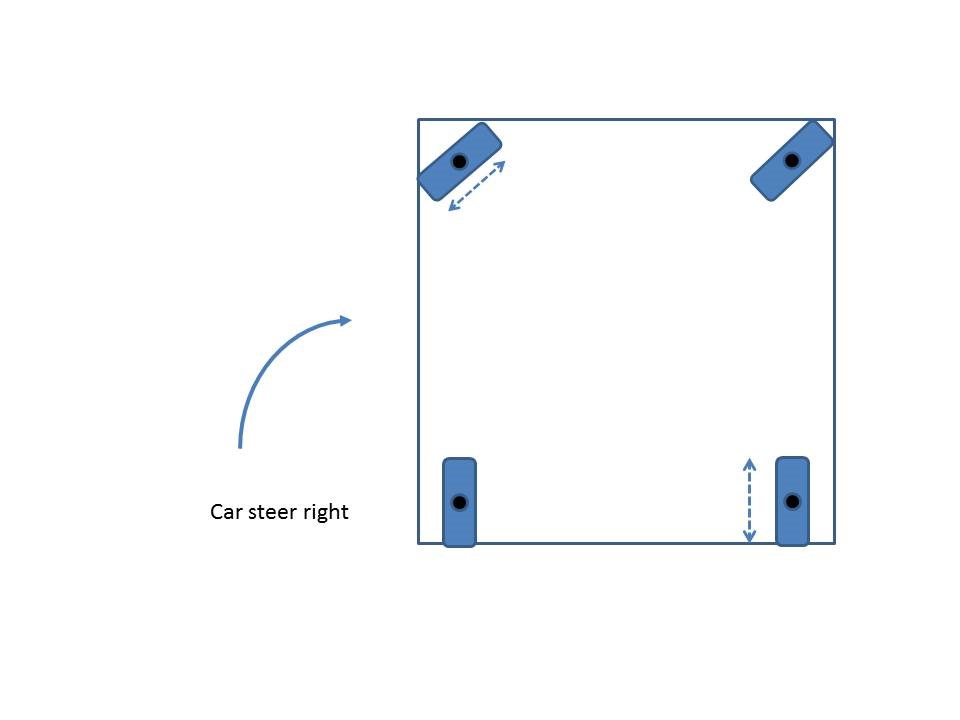
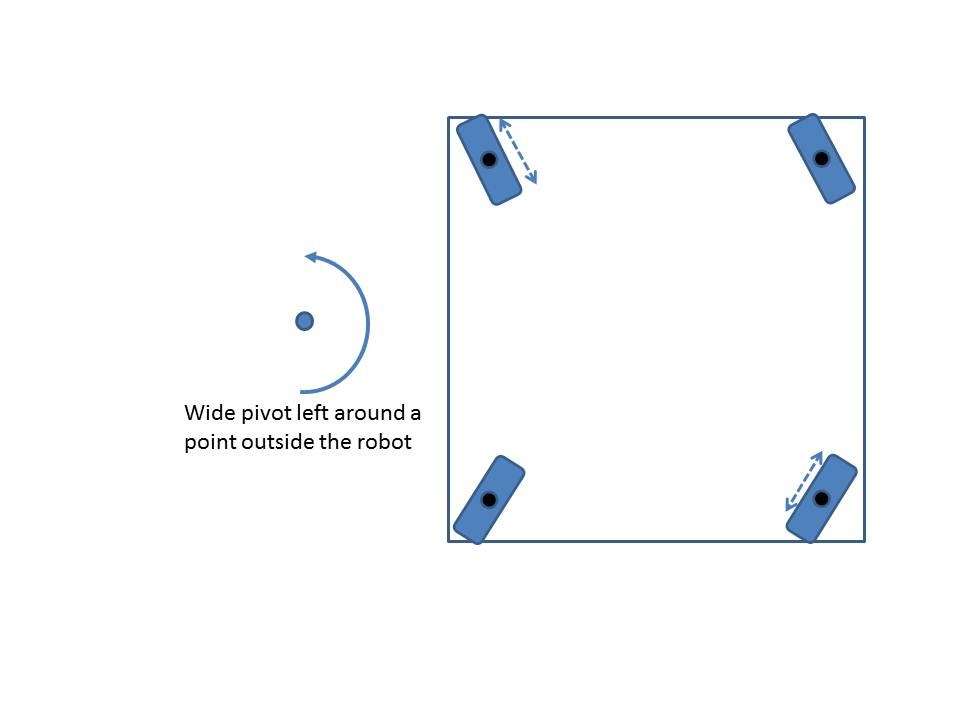
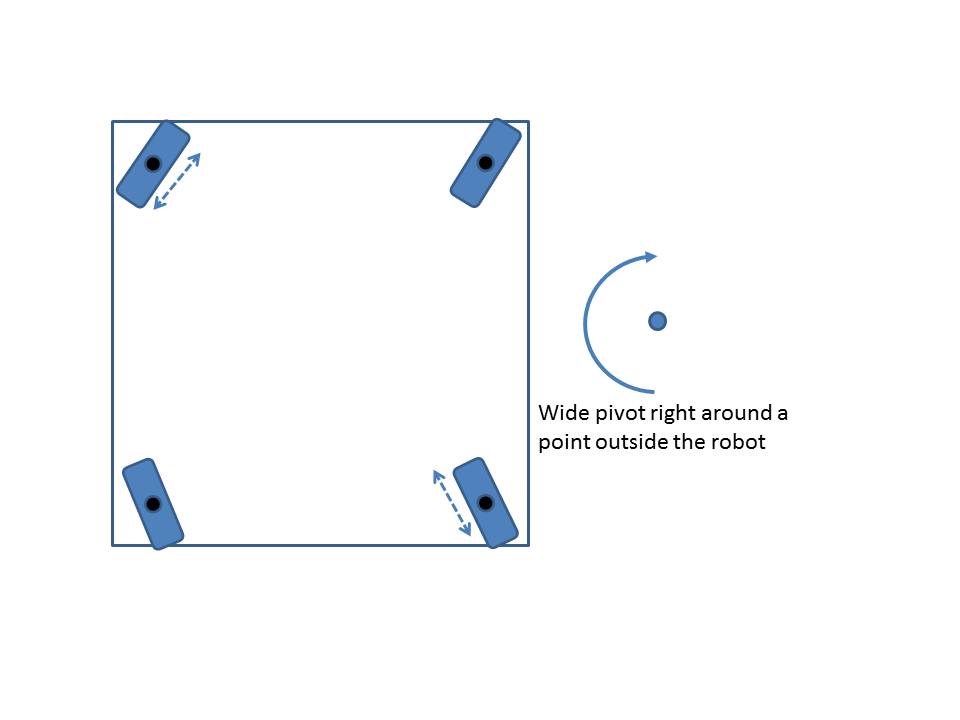
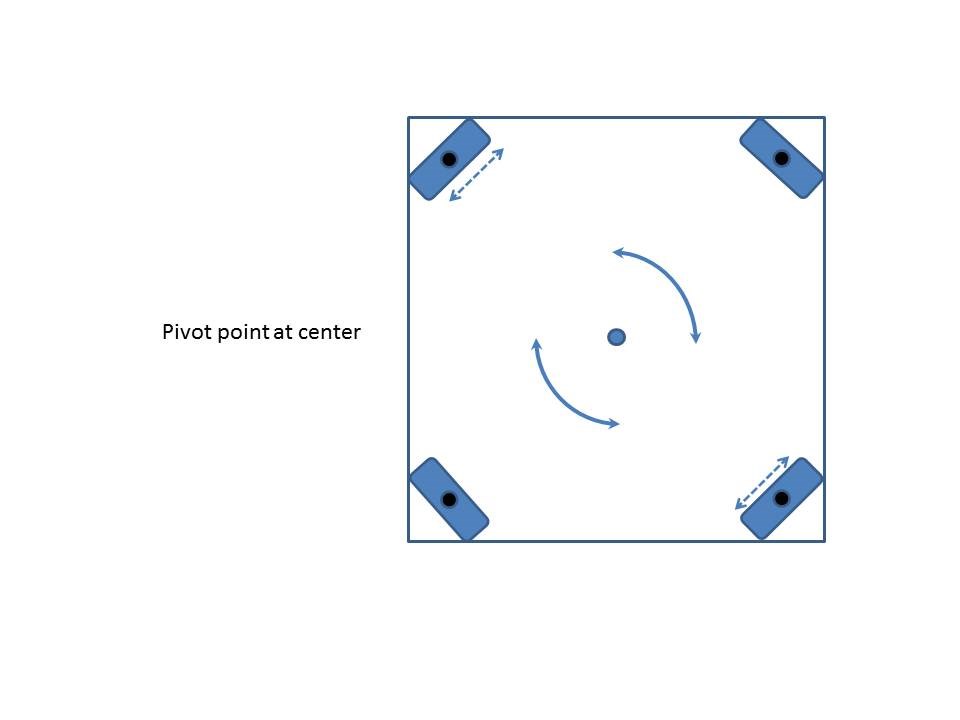
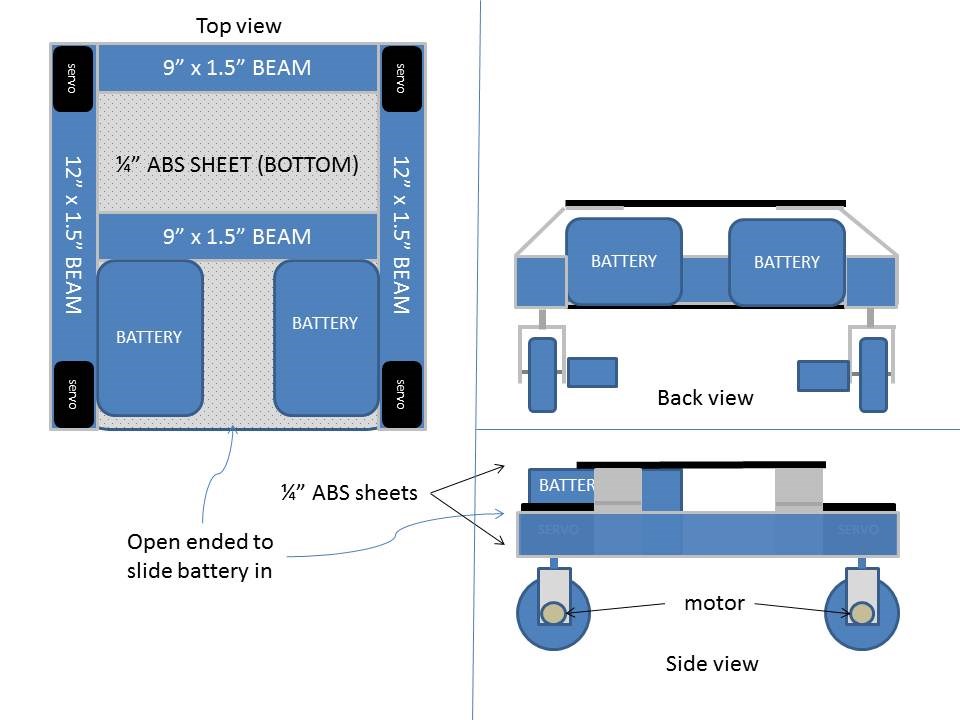
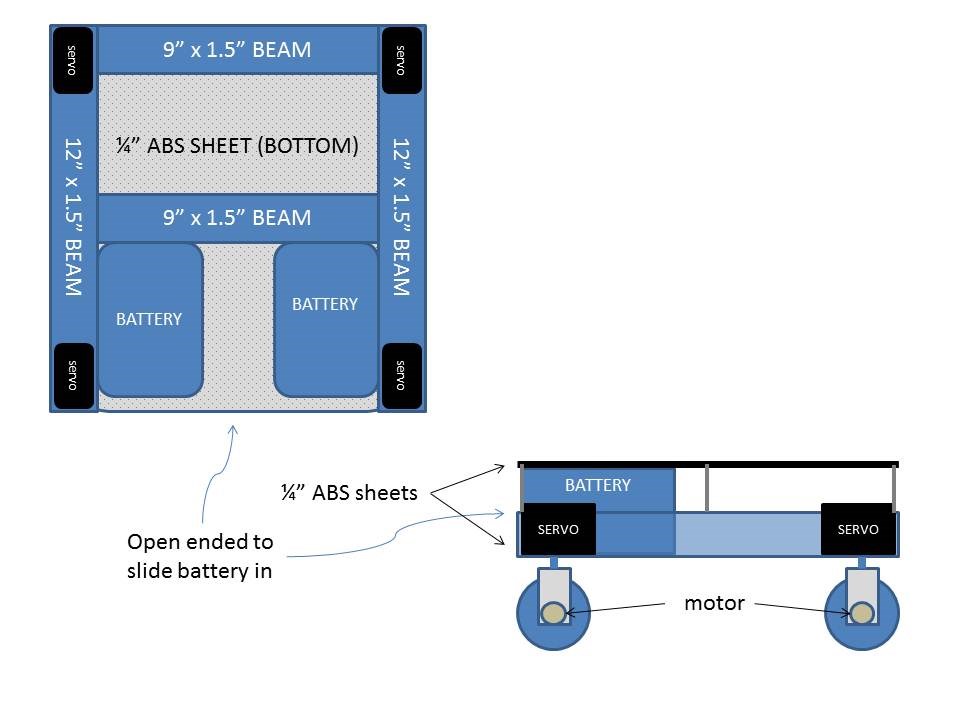
I thought I might add what I expect to get from this steering type using only 2 drive wheels but all wheel steering. Since I plan for this to be manually driven on level ground I dont think the lack of precision will be a problem. I also plan for little scripts like doing a figure 8 or turn 180 while going forward and stop.
I forgot a few more. Side to side, pivot points in front and behind as well as pivot points at each corner. You get the idea.