














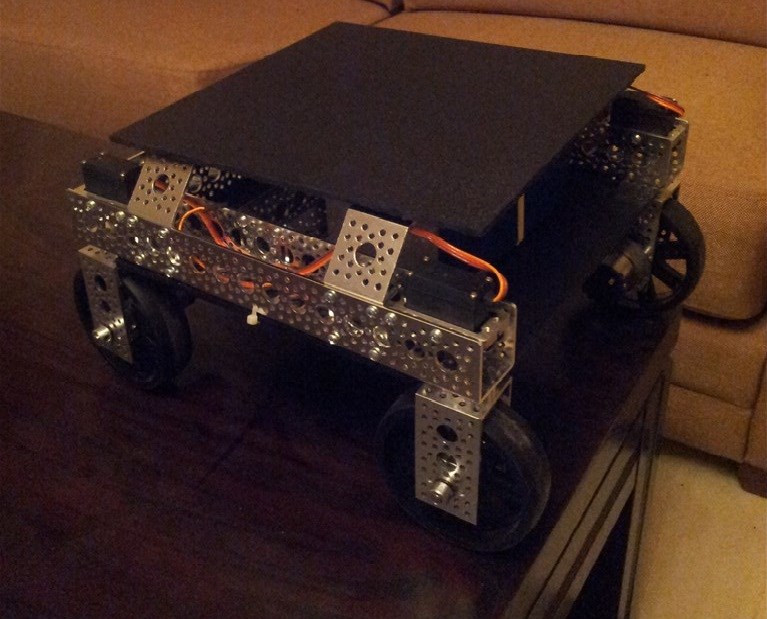

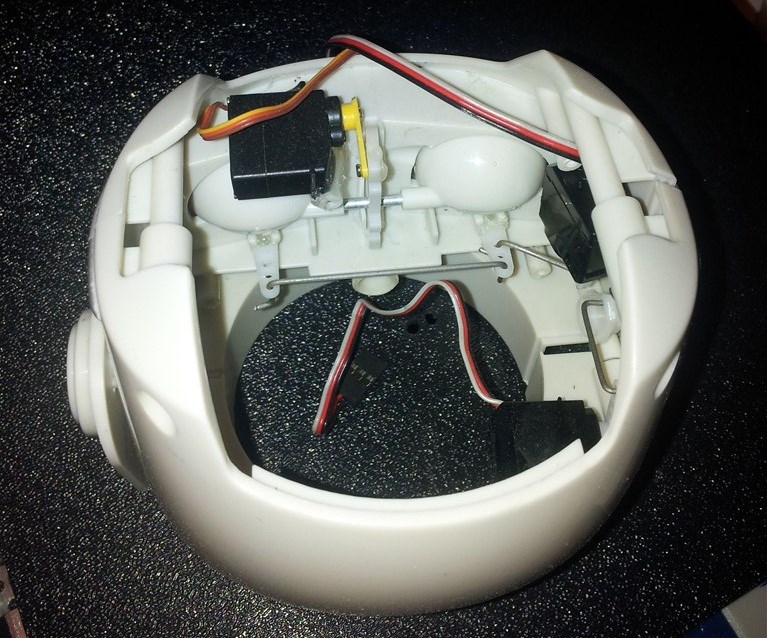










It's just a concept right now but I wanted others to see that the scale doesnt quite match. Right now its just stacked on there and neck is a little too long.
By Troy
— Last update
Discover more robots

Jeremie's Treat-O-Matic 2020
Convert a claw-style candy machine into a contactless Halloween dispenser with Atomic Pi, Arduino EZB, camera, PIR,...
Kleinjd's 17 Servo Biped (Formerly Robonova)
16 Hitec HSR-8498NB servos on dual external boards plus a 17th camera servo; 0.38A @6V draw, 1500mAh NiMH per foot and...

Daman's Metal Boxbot... Yes I'm That Impatient
BoxBot: EZ-B kit transformed into a box robot with mounted wheels and servos, speech recognition, face tracking and...

Wow! That is a cool looking robot!
Thanks but it won't be as good as others projects here.
Project robots are always in evolution Troy I really like the head look as well, very creative....
I really like the head look as well, very creative....
"but it won't be as good as others projects here" there are no competitions here! ...though there may be "bot envy"
...though there may be "bot envy" Looking forward to the "reboot" rebot?
Looking forward to the "reboot" rebot? 
hehe Yes I agree there are no competitions but I meant that I envy what others have created.
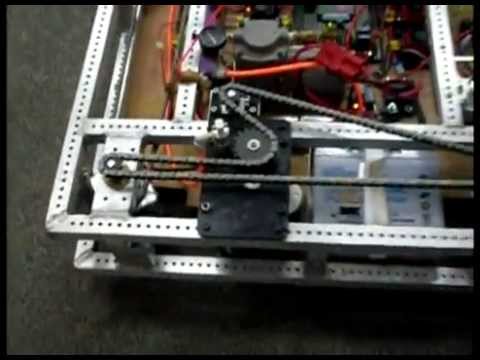
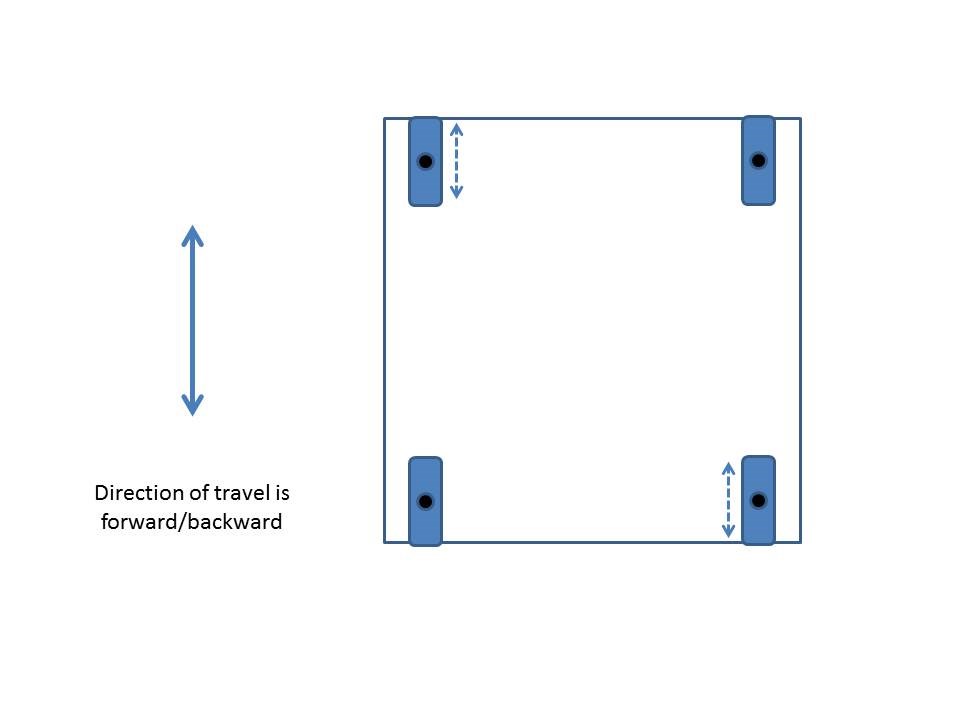
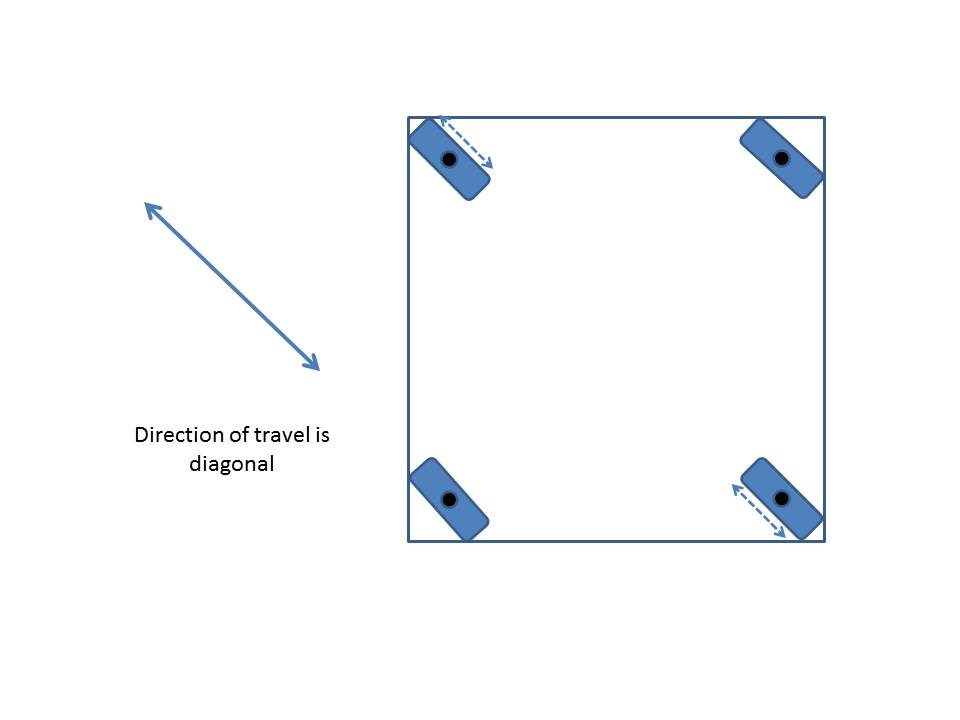
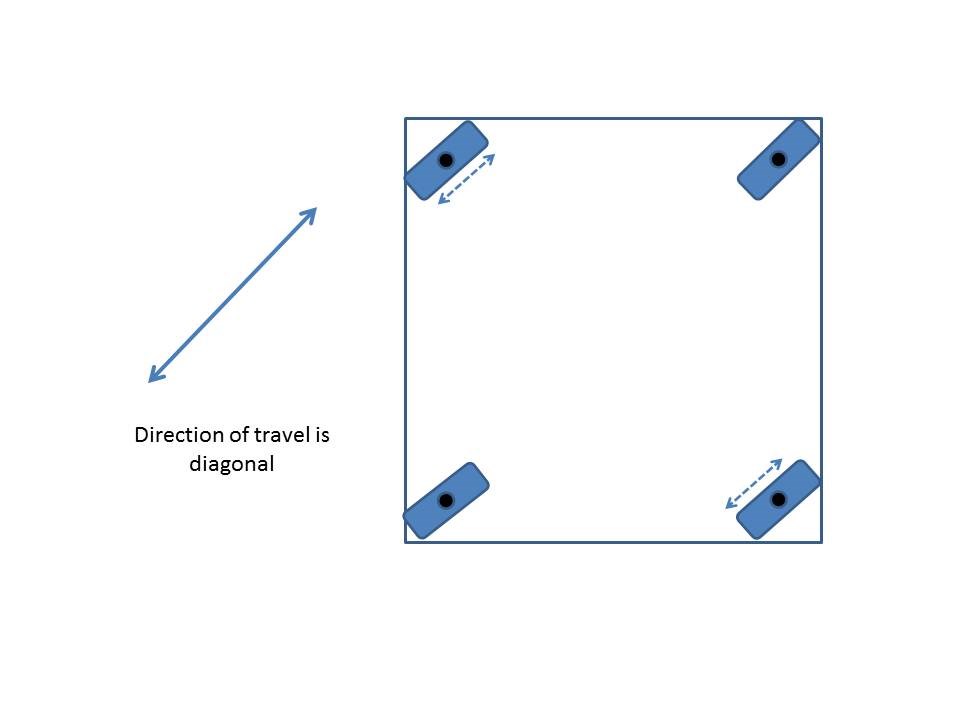
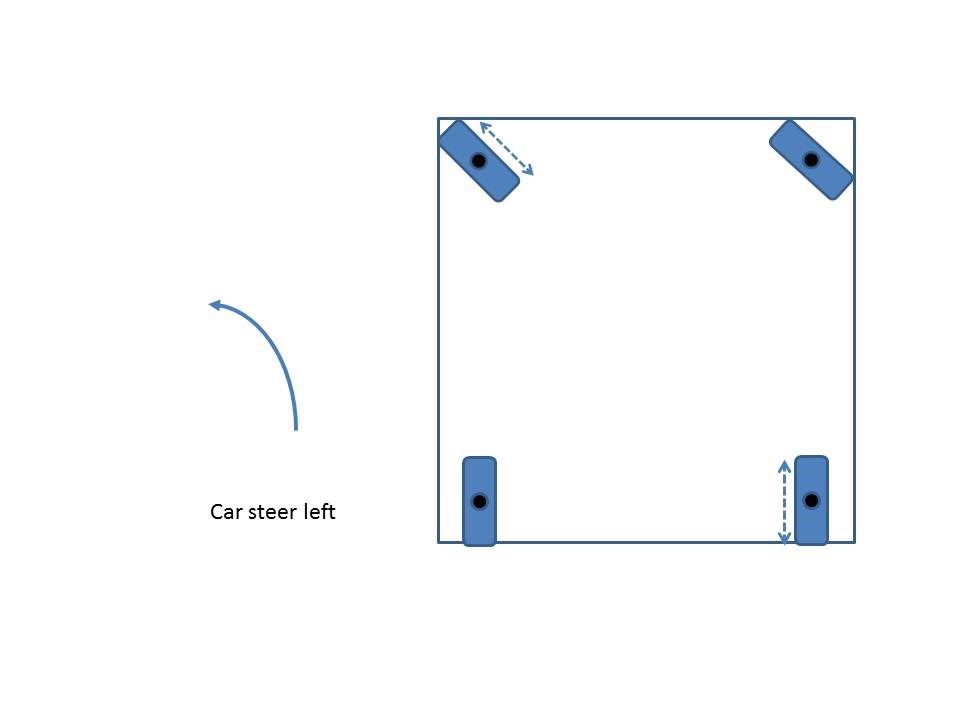
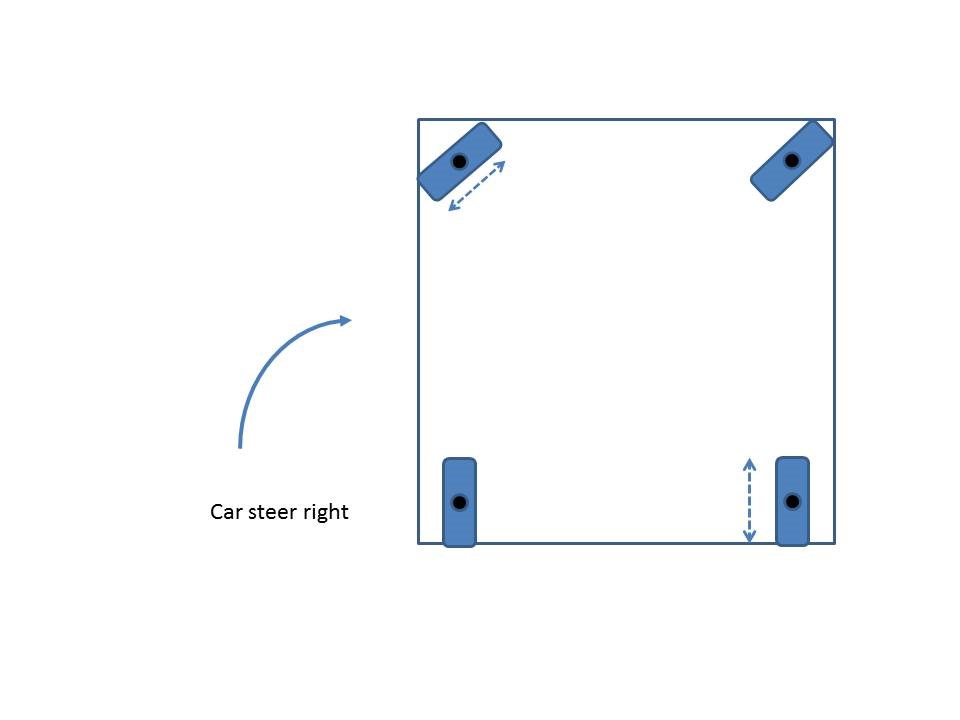
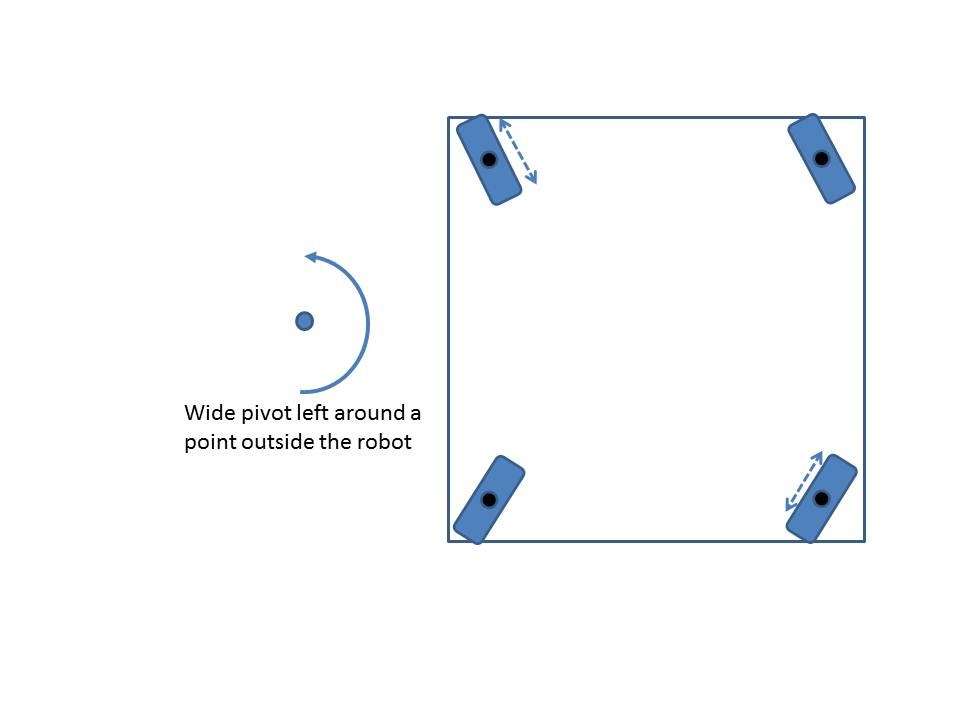
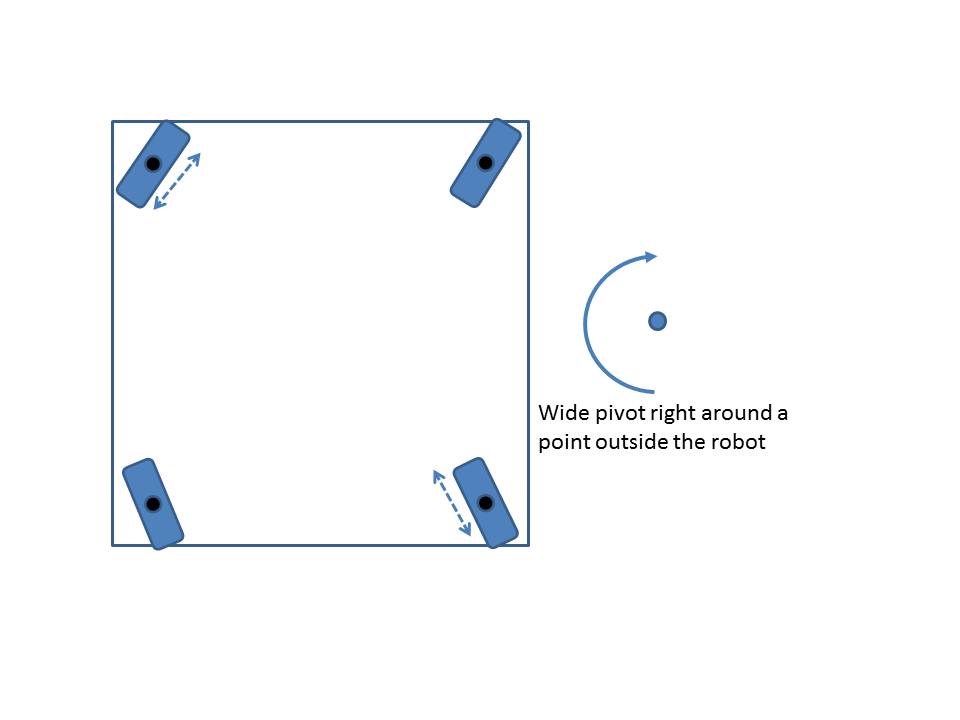
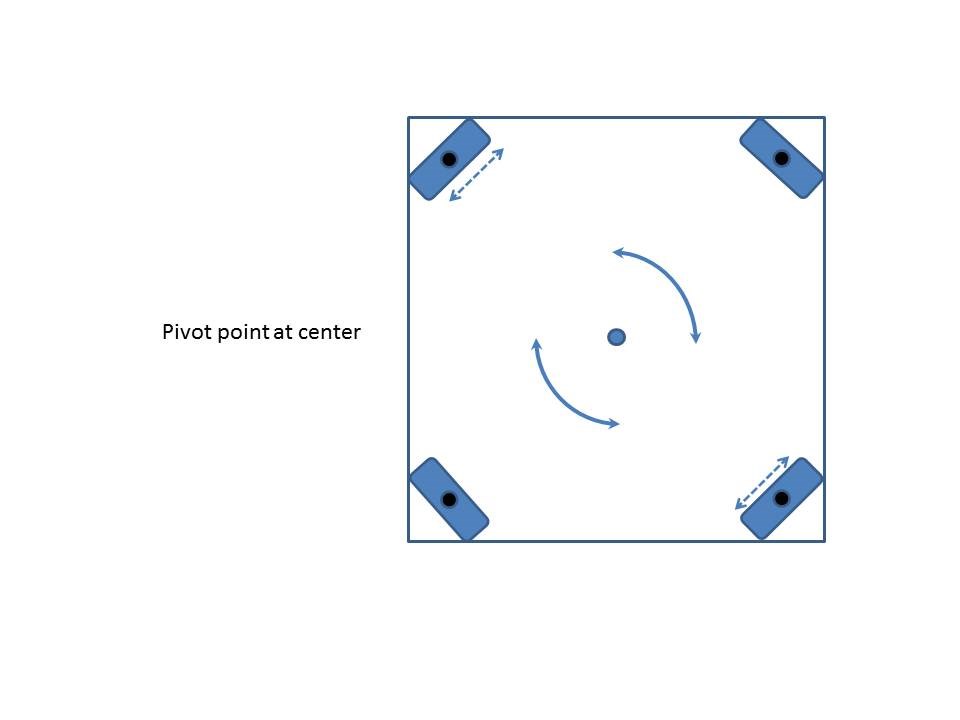
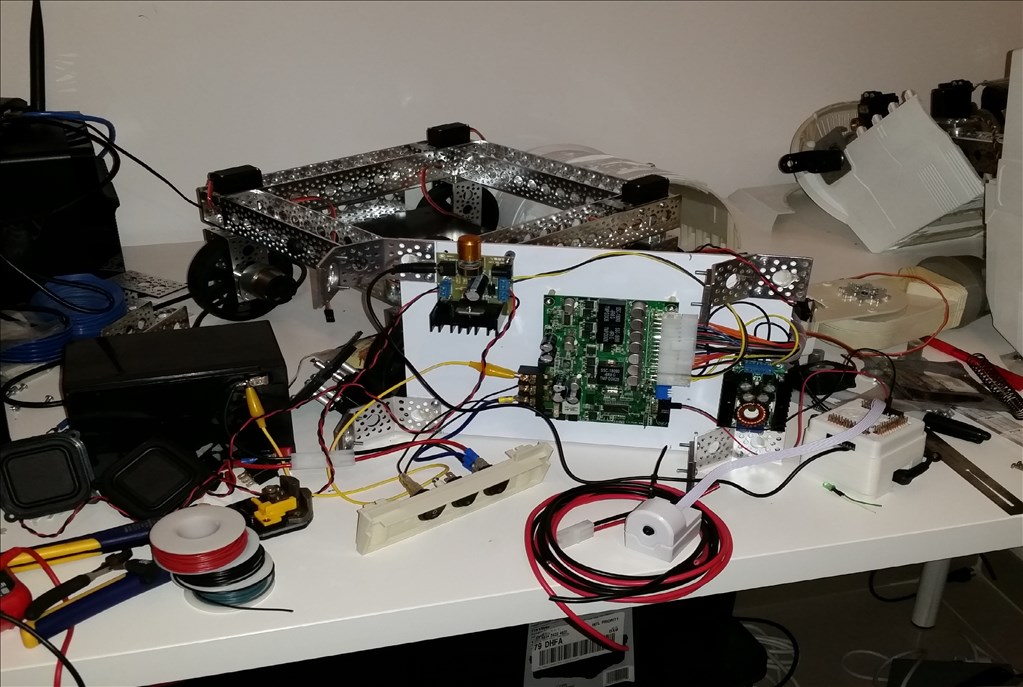
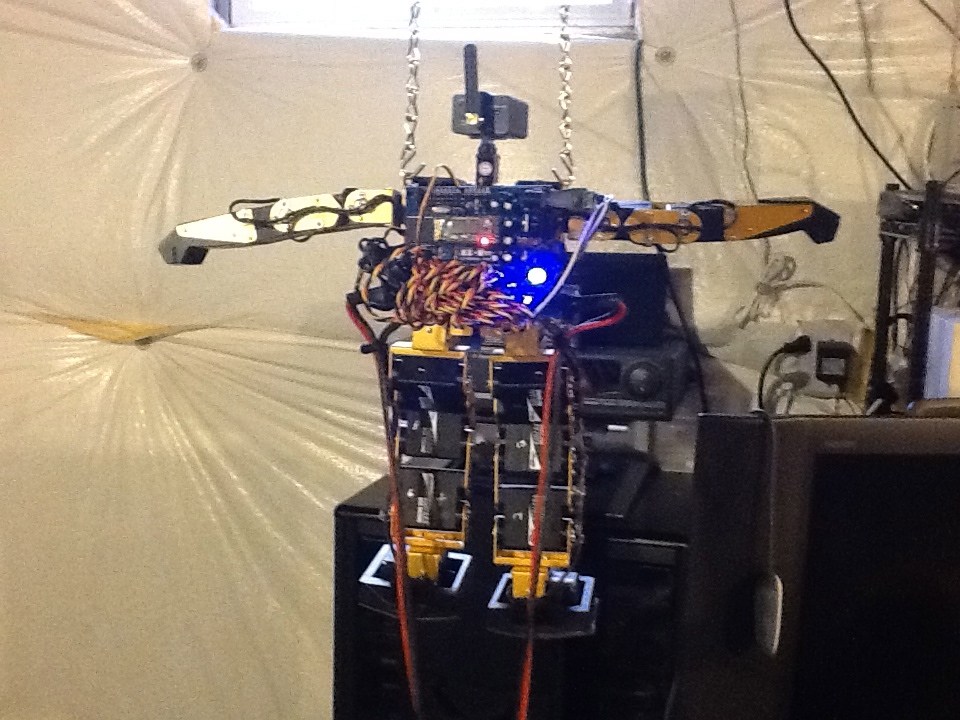
I'm at a crossroads on which type drive to use. Either the swerve type like pictured below or mecanum. The mecanum wheels I got imo are too big and may require higher torque gear motors. Which way should I go?
Yeah thats true but I wanted the movement to be different. I saw your thread using them and I like them a lot but they won't give me sideways movement though.
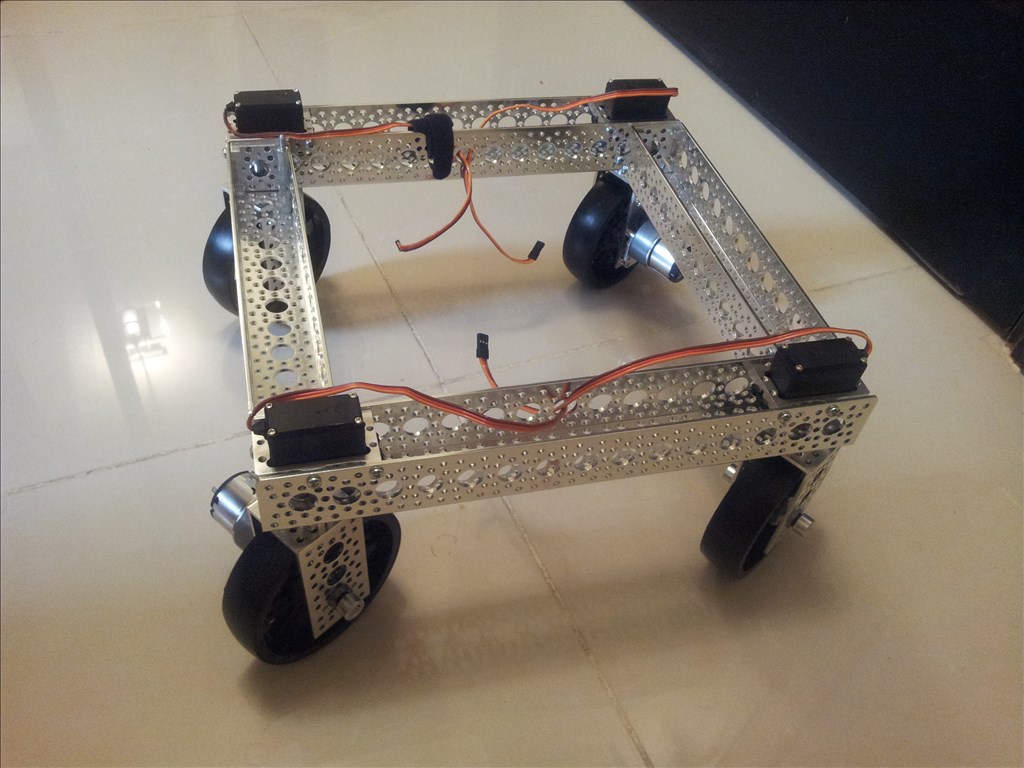
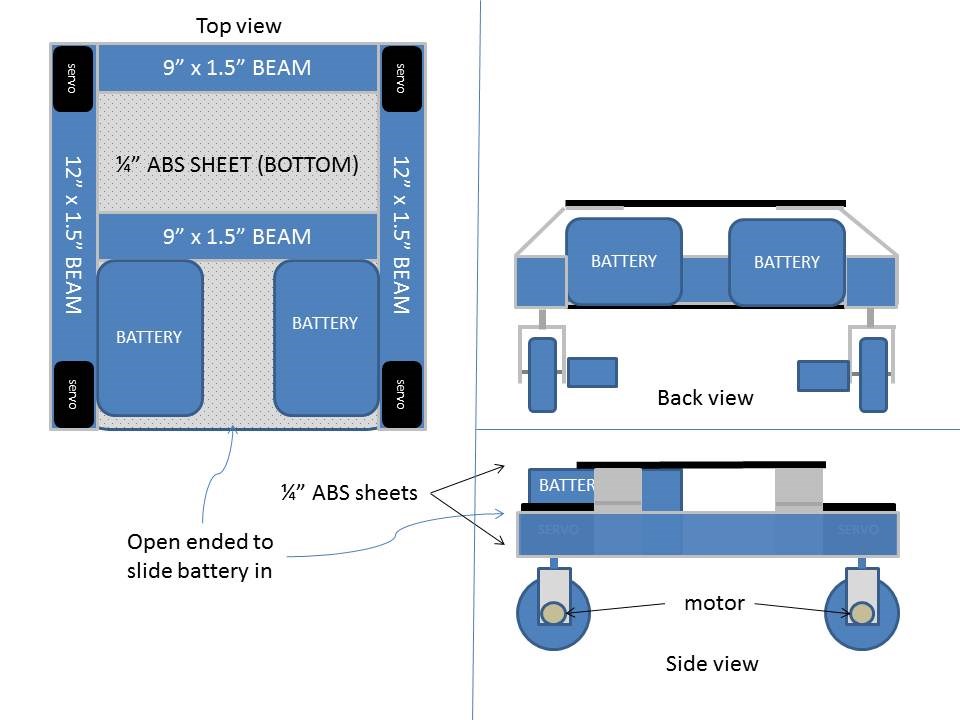
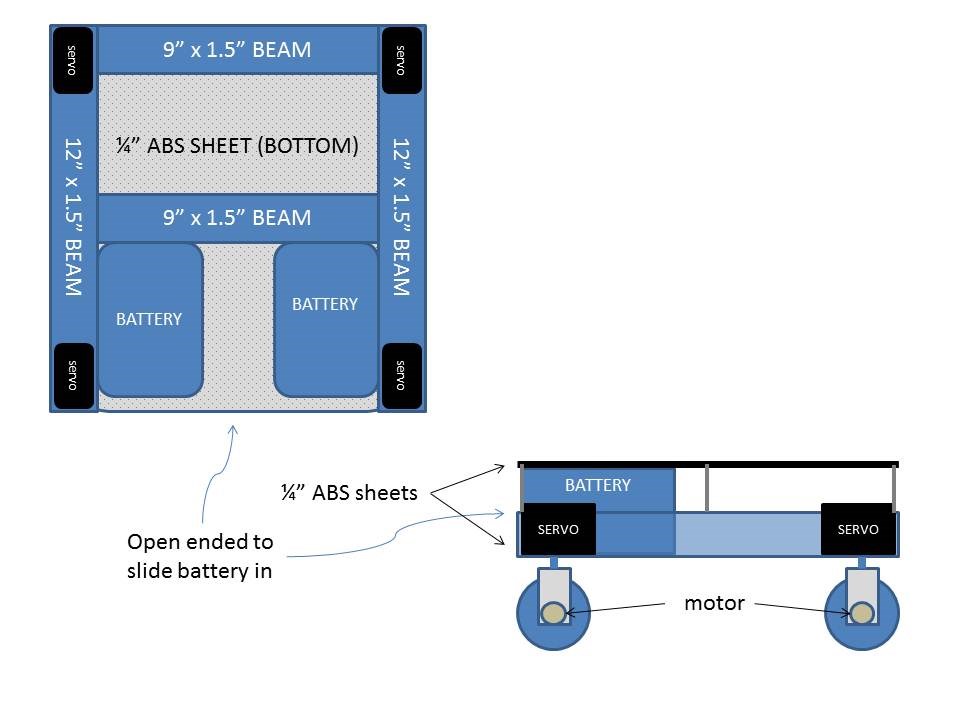
I've decided to go with the swerve on this one. I've already got most of the parts to do it. I just need the wheels pictured above and 2 more gear motor mounts. I will save the mecanums for a second bot.
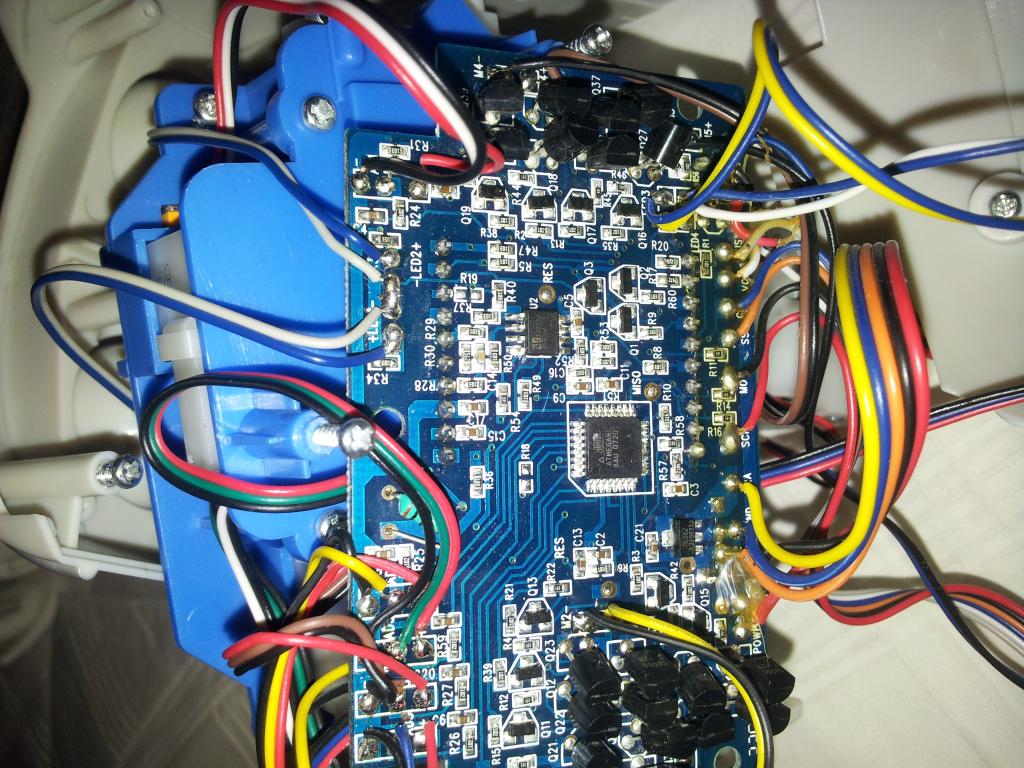
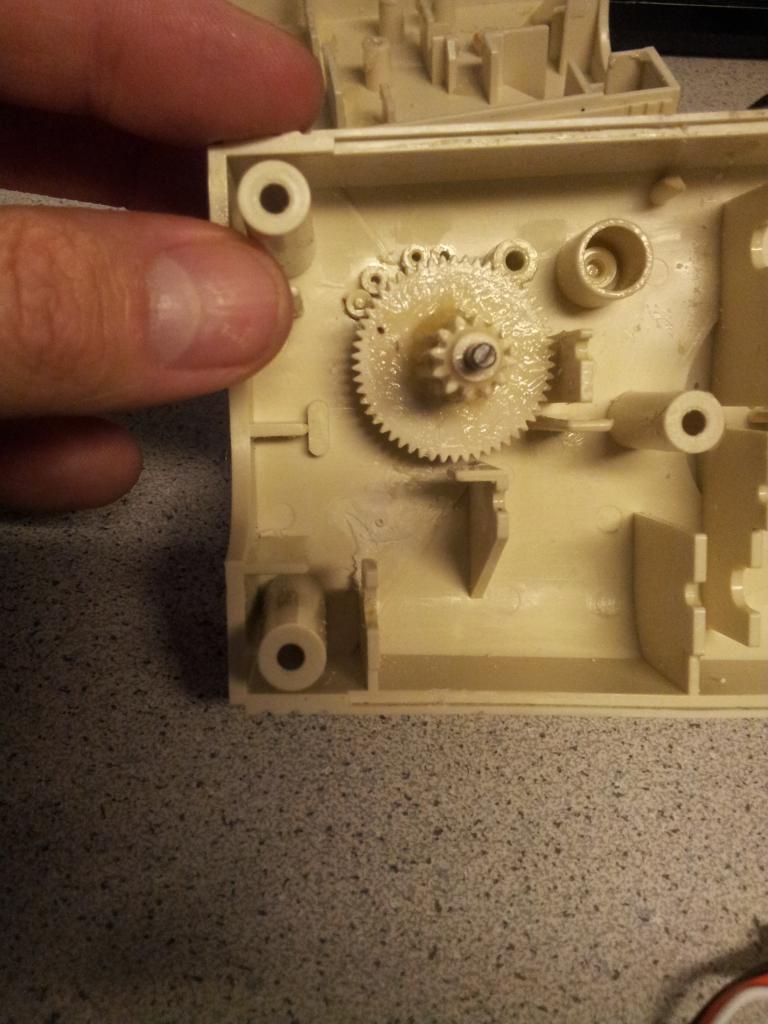
Oh god. Where to begin?

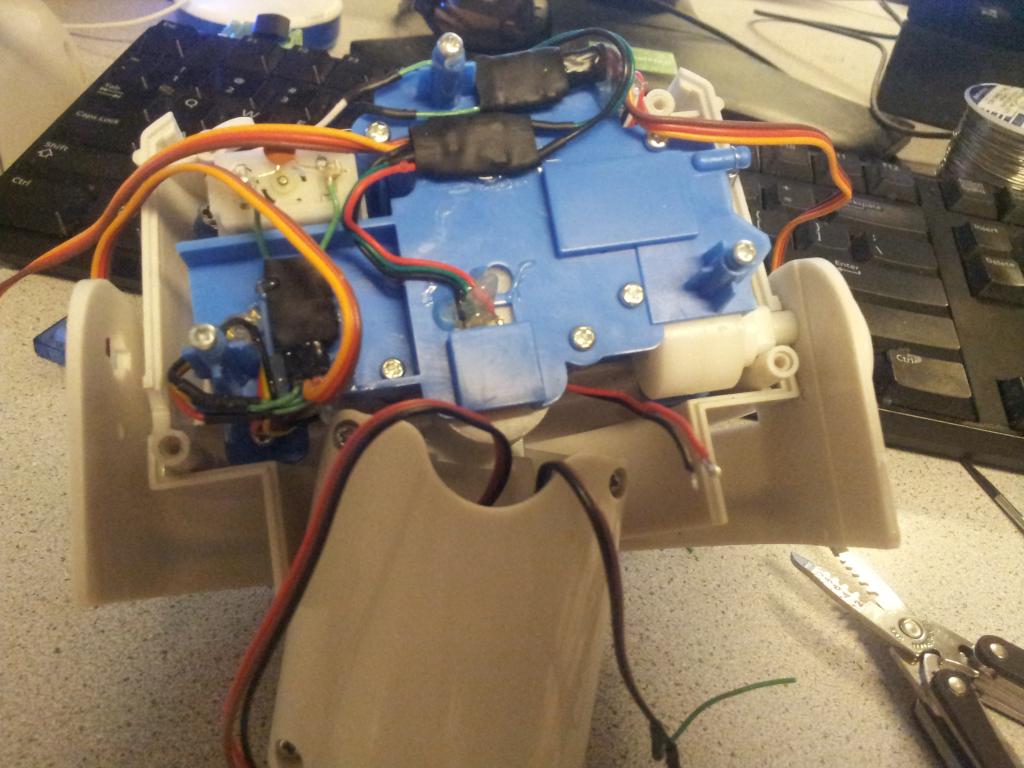
(I dont know why my pic keeps getting rotated)